Спосіб управління авіаційно-космічною системою для виведення корисного вантажу
Номер патенту: 56365
Опубліковано: 15.05.2003
Автори: Монахов Юрій Владіміровіч, Рачук Владімір Сєргєєвіч, Карпов Анатолій Стєпановіч, Іванов Робєрт Константіновіч, Ковалєвскій Міхаіл Марковіч, Борісов Андрєй Владіміровіч
Формула / Реферат
1. Спосіб управління авіаційно-космічною системою для виведення корисного вантажу, який включає старт літака-носія 1 з ракетою-носієм 2 і корисним вантажем 3 на борту з аеродрому базування 4, його політ в район запуску РН 5, відділення і відставання ракети-носія 2 від літака-носія 1 з подальшим запуском ракети-носія 2 в задану точку траєкторії і відділенням корисного вантажу 3 від ракети-носія 2, який відрізняється тим, що на максимальному крейсерському режимі польоту 6 літака-носія 2 в районі запуску 5 ракети-носія 2 здійснюють пікірування 7 літака-носія 1 для набору максимально допустимої горизонтальної швидкості польоту, в момент досягнення цієї швидкості літаком-носієм здійснюють кабрування 8 з максимально допустимим кутом атаки, що закінчується переходом 9 на кут атаки, що забезпечує значення нормального перевантаження, близького до нуля, при цьому згадані параметри кабрування вибирають відповідними досягненню в заданий момент tp точки польоту, де розрахункові швидкості Vp, висота Нр і нахил траєкторії польоту ![]() забезпечують максимальний корисний вантаж 3, що виводиться ракетою-носієм 2, а також подальший політ літака-носія 1 з допустимими параметрами як після відділення ракети-носія 2, так і у разі аварійного невідділення ракети-носія 2, після досягнення літаком-носієм 1 в розрахунковий момент часу tp точки польоту з параметрами Vp, Нр,
забезпечують максимальний корисний вантаж 3, що виводиться ракетою-носієм 2, а також подальший політ літака-носія 1 з допустимими параметрами як після відділення ракети-носія 2, так і у разі аварійного невідділення ракети-носія 2, після досягнення літаком-носієм 1 в розрахунковий момент часу tp точки польоту з параметрами Vp, Нр, ![]() і нормального перевантаження, близького до нуля, відділяють ракету-носій 2 від літака-носія 1, надаючи ракеті-носію 2 швидкість відносно літака-носія 1, рівну розрахунковій швидкості відставання 10 ракети-носія 2 від літака-носія 1 на безпечну відстань до моменту включення маршових двигунів ракети-носія 2, а перед запуском ракети-носія 2 в задану точку траєкторії здійснюють розворот 11 ракети-носія 2 з корисним вантажем 3 в положення, відмінне від вертикального на кут 10-30о у вертикальній площині в напрямі виведення.
і нормального перевантаження, близького до нуля, відділяють ракету-носій 2 від літака-носія 1, надаючи ракеті-носію 2 швидкість відносно літака-носія 1, рівну розрахунковій швидкості відставання 10 ракети-носія 2 від літака-носія 1 на безпечну відстань до моменту включення маршових двигунів ракети-носія 2, а перед запуском ракети-носія 2 в задану точку траєкторії здійснюють розворот 11 ракети-носія 2 з корисним вантажем 3 в положення, відмінне від вертикального на кут 10-30о у вертикальній площині в напрямі виведення.
2. Спосіб за п. 1, який відрізняється тим, що розворот ракети-носія 2 перед її запуском з корисним вантажем 3 в задану точку траєкторії здійснюють за допомогою маршових двигунів після їх включення.
3. Спосіб за п.1, який відрізняється тим, що розворот ракети-носія 2 перед її запуском з корисним вантажем 3 в задану точку траєкторії здійснюють за допомогою додаткової реактивної установки до включення маршових двигунів.
4. Спосіб за п.1, який відрізняється тим, що відділення ракети-носія 2 від літака-носія 1 проводять, стабілізуючи положення літака-носія в інерціальній системі координат.
Текст
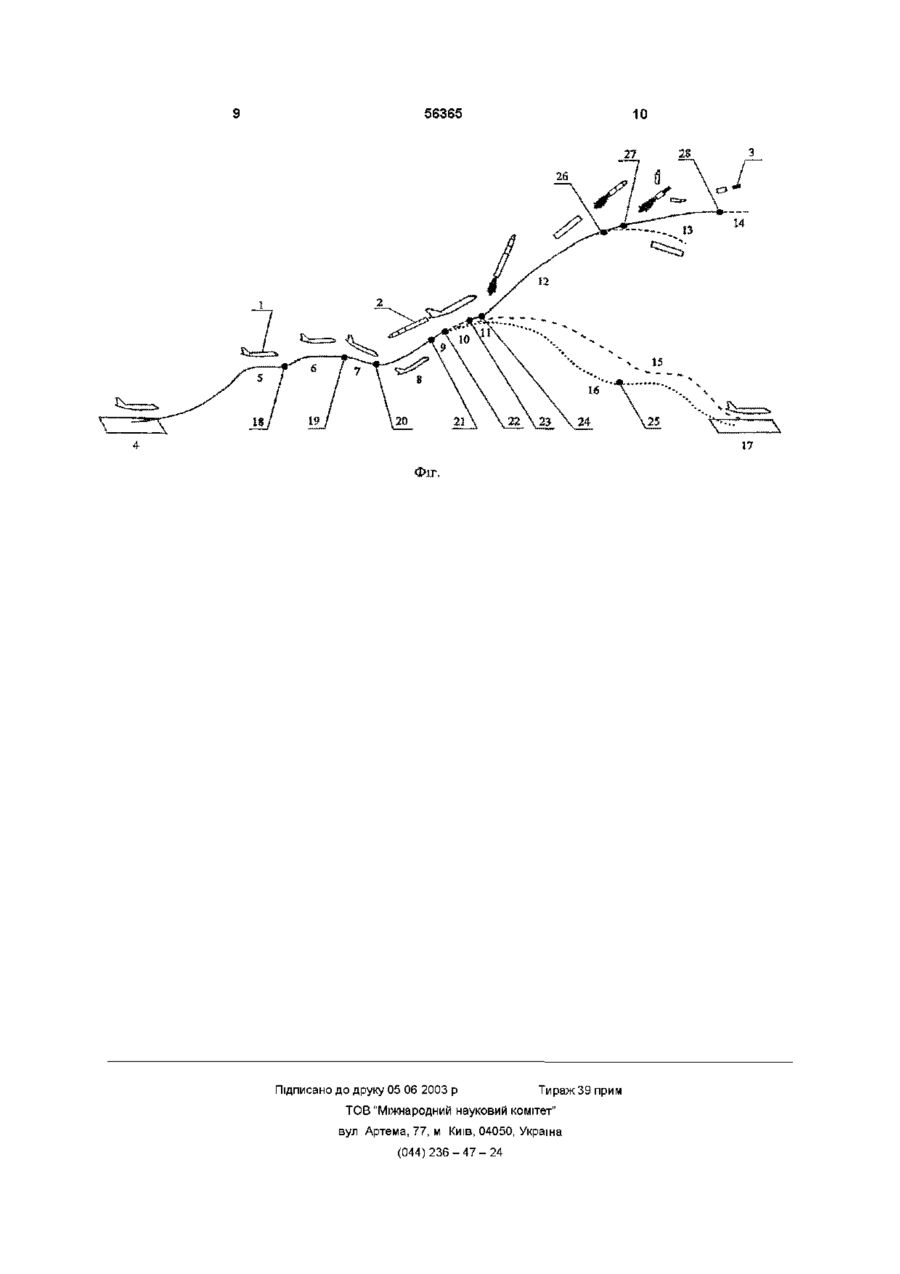
1 Спосіб управління авіацшно-космічною системою для виведення корисного вантажу, який включає старт літака-носія 1 з ракетоюносієм 2 і корисним вантажем 3 на борту з аеродрому базування 4, його політ в район запуску РН 5, відділення і відставання ракети-носія 2 від літака-носія 1 з подальшим запуском ракети-носія 2 в задану точку траєкторії і відділенням корисного вантажу 3 від ракети-носія 2, який відрізняється тим, що на максимальному крейсерському режимі польоту 6 літака-носія 2 в районі запуску 5 ракети-носія 2 здійснюють пікірування 7 літаканосія 1 для набору максимально допустимої горизонтальної швидкості польоту, в момент досягнення цієї швидкості літаком-носієм здійснюють кабрування 8 з максимально допустимим кутом атаки, що закінчується переходом 9 на кут атаки, що забезпечує значення нормального перевантаження близького до нуля, при цьому згадані параметри кабрування вибирають ВІДПОВІДНИМИ досягненню в заданий момент t p точки польоту, де розрахункові швидкості V p , висота Н р і нахил траєкторії польоту 6 р забезпечують максимальний корисний вантаж 3, що виводиться ракетоюносієм 2, а також подальший політ літака-носія 1 з допустимими параметрами як після відділення ракети-носія 2, так і у разі аварійного невідділення ракети-носія 2, після досягнення літакомносієм 1 в розрахунковий момент часу t p точки польоту з параметрами V p , Н р , 6 р і нормального Винахід відноситься до авіаційно-ракетної техніки, зокрема, до способів виведення авіаційно-космічних систем для доставки на низькі і середньовисокі навколоземні орбіти різних корисних вантажів, наприклад, супутників зв'язку, навігації, моніторингу, в тому числі екологічного, а також для оперативної доставки корисних вантажів у віддалені точки Землі і Світового океану Попередній рівень техніки Відомий спосіб виведення корисних вантажів (KB) за допомогою повітряно-космічної системи (ПКС), що містить літак-носій (ЛН), проміжний перевантаження близького до нуля, ВІДДІЛЯЮТЬ ракету-носій 2 від літака-носія 1, надаючи ракетіносію 2 швидкість відносно літака-носія 1, рівну розрахунковій швидкості відставання 10 ракетиносія 2 від літака-носія 1 на безпечну відстань до моменту включення маршових двигунів ракетиносія 2, а перед запуском ракети-носія 2 в задану точку траєкторії здійснюють розворот 11 ракетиносія 2 з корисним вантажем 3 в положення, відмінне від вертикального на кут 10-30° у вертикальній площині в напрямі виведення 2 Спосіб за п 1, який відрізняється тим, що розворот ракети-носія 2 перед її запуском з корисним вантажем 3 в задану точку траєкторії здійснюють за допомогою маршових двигунів після їх включення 3 Спосіб за п 1,який відрізняється тим, що розворот ракети-носія 2 перед її запуском з корисним вантажем 3 в задану точку траєкторії здійснюють за допомогою додаткової реактивної установки до включення маршових двигунів 4 Спосіб за п 1, який відрізняється тим, що відділення ракети-носія 2 від літака-носія 1 проводять, стабілізуючи положення літака-носія в інерціальній системі координат О ю (О CO (О ю 56365 розпнний ступінь і KB у вигляді орбітального літака Спосіб передбачає горизонтальний політ ЛН, набір висоти порядку 20 км, розгін до швидкості польоту 800 - 1100км/година, по досягненню яких включаються двигуни проміжного розпнного ступеня, ЩО ВІДДІЛЯЮТЬ Й Г ВІД ЛН І ЩО ЗДІЙСНЮЮТЬ ОО розгін і доставку KB в задану точку траєкторії, після чого KB ВІДДІЛЯЄТЬСЯ від розпнного ступеня 6 (Патент РФ № 2061630 MKH B64G, 1/14) Недоліком цього способу є небезпека запуску проміжного розпнного ступеня до його відділення від ЛН, а також неможливість досягнення потенційної вантажопідйомності всієї системи через запуск розпнного ступеня в режимі горизонтального польоту ЛН Відомий спосіб виведення, що включає горизонтальний старт системи, що складається з планера з паливними баками і відокремлюваного від нього літального апарату (ЛА) з рушійною установкою Даний спосіб реалізовується таким чином горизонтальний старт всієї системи здійснюється за допомогою двигунів ЛА, що живляться з баків, розташованих на планері, після досягнення заданої швидкості системою, ЛА ВІДДІЛЯЄТЬСЯ від планера і виходить на задану траєкторію, а планер повертається на Землю (Патент РФ № 2120398 МКИ B64G, 1/14, заявник-фірма DASA, Німеччина) Цьому способу властиві недоліки вище описаного способу, а також низька енергетична ефективність через необхідність використання маршових двигунів ЛА для розгону з Землі всієї системи планера з ЛА, що приводить до невиправданого переобважнювання конструкції ЛА і втрати його вантажопідйомності Відомий також спосіб виведення авіаційнокосмічної системи, описаний в патенті США № 5402965 (МКИ6 B64G, 1/14), фірми Rockwell International Corporation Згідно З даним способом літак-носій з ракетою-носієм, що має в своєму складі крилатий перший рівень з KB і крилатий останній рівень, що повертається, здійснює горизонтальний політ до місця запуску РН, відділення РН від ЛН, запуск РН в задану точку траєкторії і відділення від РН крилатого останнього рівня, що повертається Крилатий останній рівень, що повертається, виходить на орбіту, виконує задану цільову задачу, здійснює схід з орбіти, аеродинамічне гальмування в атмосфері і керовану горизонтальну посадку на заданий аеродром Недоліком цього способу є необхідність застосування крилатого першого рівня РН і її відділення від ЛН в горизонтальному польоті, що, ВІДПОВІДНО, обважнює конструкцію першого ступеня РН і не дозволяє реалізувати оптимальні початкові кінематичні параметри запуску РН після відділення її від ЛН Найбільш близьким аналогом способу, що пропонується є спосіб виведення, описаний в патенті США № 4901949 (МКИ6 В64С, 3/38) фірми Orbital Sciences Corporation (PCT/VS89/00867, 08 0389) (захищено патентом РФ № 2026798 МКИ6 B64D, 5/100, F42B, 15/00) Даний спосіб використовується для авіацій но-космічної системи, що містить ЛН, триступінчату РН з крилатим першим рівнем і KB Спосіб полягає в тому, що здійснюється розгін РН до місця її запуску на траєкторії польоту ЛН, причому напрям польоту ЛН співпадає з напрямом запуску РН, горизонтальне відділення РН від ЛН, включення рушійної установки першого рівня здійснюють після відділення і відставання РН від ЛН при горизонтальному положенні РН, здійснюють розгін РН з використанням аеродинамічної підіймальної сили крилатого першого рівня і сили тяги її двигунів, після чого ВІДДІЛЯЮТЬ крилатий перший рівень і запускають другий рівень Одним з недоліків цього способу виведення є необхідність використання крила на першому рівні РН, що обважнює її конструкцію, ускладнює управління одночасно аеродинамічними і реактивними виконавчими органами Включення рушійної установки першого рівня в горизонтальному положенні РН не дозволяє реалізувати попередній відділенню РН від ЛН оптимальний маневр ЛН для отримання розрахункових кінематичних параметрів рушення (висота, швидкість, кут сходження), що забезпечують максимальну вантажопідйомність РН в заданій точці траєкторії виведення Розкриття винаходу Задачею винаходу є підвищення вантажопідйомності авіаційно-космічної системи при виведенні корисного вантажу в космос, будь-яку точку Землі або Світового океану, забезпечення надійного розділення РН від ЛН, забезпечення безпеки ЛН і його екіпажу при включенні маршових двигунів першого рівня РН, зниження вартості запуску корисного вантажу Ця задача досягається тим, що в способі управління авіаційно-космічною системою для виведення корисного вантажу, що включає старт літака-носія з ракетою-носієм і корисним вантажем на борту з аеродрому базування, його політ в район запуску РН, відділення і відставання ракети-носія від літака-носія з подальшим запуском ракети-носія в задану точку траєкторії і відділення корисного вантажу від ракети-носія, на максимальному крейсерському режимі польоту літаканосія в районі запуску ракети-носія здійснюють пікірування літака-носія для набору максимально допустимої горизонтальної швидкості польоту, в момент досягнення цієї швидкості літаком-носієм здійснюють кабрування з максимально допустимим кутом атаки, що закінчується переходом на кут атаки, що забезпечує значення нормального перевантаження близького до нуля, при цьому згадані параметри кабрування вибирають ВІДПОВІДНИМИ досягненню в заданий момент t p точки польоту, де розрахункові швидкість Vp, висота Нр і нахил траєкторії польоту 6Р забезпечують максимальний корисний вантаж, що виводиться ракетою-носієм, а також подальший політ літаканосія з допустимими параметрами як після відділення ракети-носія, так і у разі аварійного невідділення ракети-носія, після досягнення літакомносієм в розрахунковий момент часу t p точки польоту з параметрами Vp, Нр, 6Р і нормального перевантаження близького до нуля, ВІДДІЛЯЮТЬ 56365 ракету-носш від літака-носія, надаючи ракетіНОСІЄВІ швидкість відносно літака-носія, рівну розрахунковій швидкості відставання ракетиносія від літака-носія на безпечну відстань до моменту включення маршових двигунів ракетиносія, а перед запуском ракети-носія в задану точку траєкторії здійснюють розворот ракетиносія з корисним вантажем в положення, відмінне від вертикального на кут 10 - 30° у вертикальній площині в напрямі виведення Розворот ракети-носія перед її запуском з корисним вантажем в задану точку траєкторії здійснюють за допомогою маршових двигунів після їх включення, або розворот ракети-носія перед її запуском з корисним вантажем в задану точку траєкторії здійснюють за допомогою додаткової реактивної установки до включення маршових двигунів Відділення ракети-носія від літака-носія проводять, стабілізуючи положення літака-носія в шерціальній системі координат Задачею винаходу, що пропонується є підвищення вантажопідйомності авіаційно-космічної системи при виведенні KB, забезпечення надійного розділення РН від ЛН, забезпечення безпеки ЛН і його екіпажу при включенні маршових двигунів першого рівня РН, зниження вартості розробки авіаційно-космічної системи і вартості запуску KB Короткий опис фігур креслення Суть винаходу пояснюється на схемі управління польотом авіаційно-космічної системи, поданої на Фіг, де 1 - літак-носій з РН і KB на борту, 2 - ракета-носій, 3 - корисний вантаж, 4 - горизонтальний старт ЛН з аеродрому базування, 5 - дільниця польоту ЛН в район запуску РН, 6 - дільниця польоту ЛН на максимальному крейсерському режимі, 7 - дільниця пікірування ЛН і набір максимально-допустимої горизонтальної швидкості польоту, 8 - дільниця кабрування ЛН з максимальнодопустимим кутом атаки, 9 - дільниця зменшення кута атаки ЛН і вихід на режим польоту з нормальним перевантаженням близьким до нуля (0 - 0,2 від сили тяжіння), 10 - дільниця пасивного польоту РН і відставання РН від ЛН на задану відстань, 11 - дільниця розвороту РН за тангажем і досягнення оптимального кута тангажу для запуску РН з KB в задану точку траєкторії польоту, 12 - дільниця активного польоту першого ступеня РН, 13 - дільниця активного польоту останнього ступеня РН, 14 - відділення KB від РН, 15 - траєкторія польоту ЛН на аеродром посадки після десантування РН з KB, 16 - траєкторія польоту ЛН на аеродром посадки якщо десантування РН з KB не відбулося , 17 - аеродром посадки ЛН, 18 -точка досягнення району запуску РН, 19 - точка почала маневру пікірування, 20 - точка досягнення максимально допустимої горизонтальної швидкості польоту ЛН, 21 -точка почала зменшення кута атаки ЛН, 22 - точка досягнення в заданий момент часу t p розрахункових значень швидкості Vp, висоти Нр і нахилу траєкторії польоту 6Р, досягнення нормального перевантаження ЛН близькою до нуля і подальшого десантування РН із заданою швидкістю відставання відносно ЛН, 23 - точка досягнення РН заданої безпечної відстані відносно ЛН і початку розвороту РН по тангажу, 24 - точка досягнення оптимального кута тангажу РН, ВІДМІННОГО від вертикального на кут 10 30° у вертикальній площині в напрямі виведення, 25 - точка зливу компонентів палива РН за борт ЛН (якщо десантування РН не відбулося), 26 - точка відділення першого ступеня і запуску другого ступеня РН, 27 -точка відділення головного обтічника РН, 28 - точка закінчення роботи останнього ступеня РН і відділення KB Запропонований спосіб управління польотом авіаційно-космічної системи реалізовується таким чином після старту ЛН 1 з РН 2 і KB 3 на борту з аеродрому базування 4 і польоту ЛН в район запуску РН 5, при досягненні району запуску, РН (точка 18) літак-носій переходить на максимальний крейсерський режим польоту (дільниця 6), при досягненні розрахункової точки 19 польоту на максимальному крейсерському режимі ЛН 1 починає маневр пікірування і набір максимальнодопустимої горизонтальної швидкості польоту (дільниця 7), по досягненні максимально-допустимої горизонтальної швидкості польоту (точка 20) ЛН 1 переходить на режим кабрування з максимальнодопустимим кутом атаки (дільниця 8), що закінчується переходом (точка 21) на кут атаки, що забезпечує значення нормального перевантаження, діючого на ЛН 1, близького до нуля (дільниця 9), при досягненні в заданий момент часу t p розрахункових значень швидкості Vp, висоти Нр і нахилу траєкторії польоту 6Р, а також нормального перевантаження, діючого на ЛН 1, близького до нуля (0 - 0,2 від сили тяжіння), здійснюється десантування РН 2 із заданою швидкістю відставання відносно ЛН (точка 22), після десантування РН 2 і її відставання від ЛН 1 в режимі пасивного польоту (дільниця 10) на задану безпечну відстань (точка 23) здійснюється розворот РН 2 по тангажу до досягнення оптимального кута тангажа для запуску РН 2 з KB З в задану точку траєкторії польоту (дільниця 11) Розворот по тангажу може здійснюватися за допомогою маршових двигунів після їх включення або за допомогою додаткової реактивної установки до включення маршових двигунів, після досягнення оптимального кута тангажа РН, ВІДМІННОГО від вертикального на кут 10 - 30° у вертикальній площині в напрямі виведення (точка 24), здійснюється активний політ першого ступеня РН (дільниця 12), відділення першого ступеня РН (точка 26), активний політ подальших ступенів (дільниця 13), відділення головного обтічника 56365 (точка 27), закінчення роботи останнього ступеня (точка 28) і відділення KB від РН (дільниця 14), після десантування РН 2 (точка 22) літакносій здійснює політ по траєкторії 16 на аеродром посадки, якщо десантування РН 2 з KB 3 з ЛН 1 не відбулося в заданий момент часу t p (точка 22) літакносій з РН і KB на борту здійснює політ по траєкторії 16 на аеродром посадки Для забезпечення безпеки ЛН 1 і його екіпажу на траєкторії польоту 16 здійснюється злив за борт ЛН 1 компонентів палива РН (точка 25) і посадка ЛН на аеродром 17 з незаправленою РН і KB Технічним результатом винаходу, що пропонується є можливість збільшення стартової маси РН 2 за рахунок и десантування на режимах польоту ЛН 1 з нормальним перевантаженням близьким до нуля (режим близький до невагомості), що дозволяє забезпечити балансування і керованість ЛН за рахунок можливостей аеродинамічних органів управління, що розташовуються в процесі рушення РН і надання їй розрахункової швидкості відставання від ЛН 1 Збільшення стартової маси РН 2 і досягнення в заданий момент t p розрахункових значень швидкості Vp, висоти Нр і нахилу траєкторії польоту Єр, що забезпечують максимальний корисний вантаж, що виводиться ракетою-носієм за рахунок послідовних маневрів пікірування і кабрування, дозволяють досягнути максимальної вантажопідйомності авіаційно-космічної системи при виведенні KB в космос Відділення РН 2 від ЛН 1 в режимі польоту близькому до невагомості з наданням РН заданої швидкості відносно ЛН, рівній розрахунковій швидкості відставання РН від ЛН на безпечну відстань до моменту включення маршових двигунів ракети-носія, забезпечують надійне розділення РН і ЛН з мінімальним їх навантаженням, а також безпеку ЛН і його екіпажу при включенні маршових двигунів першого рівня на безпечній відстані Спосіб управління авіаційно-космічною системою для виведення корисного вантажу, що пропонується, дозволяє відмовитися від створення аеродинамічних органів на РН для управління и польотом на активних дільницях (крило, оперення), що полегшує конструкцію РН, виключає витрати на їх розробку, відробляння і виготовлення і, як наслідок, знижує вартість розробки авіакосмічної системи і вартість запуску KB Промислова застосовність Нижче, для прикладу, приводиться варіант виконання способу управління авіаційнокосмічною системою, що пропонується, що використовує як ЛН важкий транспортний літак АН124-100 «Руслан» і рідинну двоступеневу РН на екологічно чистих компонентах палива, «керосин - рідкий кисень» Ракета-носій має масу 8 0 - 1 0 0 тонн, управління по каналах тангажа, рискання і крену здійснюється за допомогою маршових двигунів Вантажопідйомність РН на опорну полярну орбіту становить 2 - 3 тонни Десантування РН з ЛН здійснюється за допомогою транспортнопускового контейнера і пневматичної системи 8 Після старту з аеродрому базування 4 і досягнення району запуску РН літак-носій переходить на максимальний крейсерський режим польоту на висоті близько 10км з швидкістю близько 830 845км/година За 35 - 40сек до розрахункового моменту десантування РН літак-носій починає пікірування і через 12 - 17сек досягає максимальнодопустимої горизонтальної швидкості М = 0,8 0,81, при цьому висота польоту знижується до 9,5 - 9,7км Після досягнення максимально-допустимої горизонтальної швидкості ЛН здійснює перехід на кабрування з максимально-допустимим кутом атаки, який на ДІЛЬНИЦІ кабрування змінюється від 7° на початку кабрування до 11,5° наприкінці, при цьому швидкість польоту знижується до М = 0,62, висота зростає до 10,5 - 11км, а кут сходження траєкторії досягає 27 - 29° За 35 - 40сек до розрахункового моменту десантування ЛН починає перехід на малі кути атаки і зниження нормального перевантаження до значень близьких до нуля При цьому кути атаки ЛН знижуються до 2 - 2,5° При досягненні розрахункового моменту десантування t p і нормального перевантаження близького до нуля за допомогою пневматичної системи десантування РН виштовхується з транспортно-пускового контейнера із заданою швидкістю відставання відносно ЛН При цьому літак-носій має розрахункові значення швидкості Vp = 0,6м, висоти Нр = 1 1 - 11,4км і кута нахилу траєкторії Єр ~ 20 - 25°, які забезпечують максимальний корисний вантаж, що виводиться ракетою-носієм, а також подальший політ літака-носія з допустимими параметрами як після відділення РН, так і у разі аварійного невідділення РН Після 5 - бсек пасивного польоту і відставання РН на безпечну відстань від літака-носія (близько 150м) включаються маршові двигуни РН, з їх допомогою здійснюється розворот РН по тангажу до значень 10 - 30° від вертикалі у вертикальній площині в напрямі виведення, реалізовується активний політ першого ступеня, його відділення, активний політ другого ступеня, відділення головного обтічника, закінчення роботи другого ступеня і відділення KB від РН Після десантування РН або якщо десантування не відбулося (аварійний випадок) літакносій здійснює політ на аеродром посадки, причому в аварійному випадку здійснюється злив за борт ЛН компонентів палива РН і посадка ЛН з незаправленою РН Спосіб управління, що пропонується дозволив реалізувати максимально-можливу масу ракети-носія до 100 тонн, вантажопідйомність авіаЦІЙНО-КОСМІЧНОІ системи на опорну (200км) полярну орбіту до 3 тонн, надійне розділення РН від ЛН, забезпечити безпеку ЛН і його екіпажу при запуску маршових двигунів РН, спростити конструкцію ракети-носія за рахунок відмови від авіаційних елементів (крила, оперення) і знизити вартість розробки і запуску KB 56365 10 27 26 Фіг. Підписано до друку 05 06 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24 2 S
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for controlling aerospace system for putting payloads into orbit
Назва патенту російськоюСпособ управления авиационно-космической системой для вывода полезного груза на орбиту
Автори російськоюИванов Роберт Константинович, Карпов Анатолий Степанович, Рачук Владимир Сергеевич, МОНАХОВ Юрий Владимирович, КОВАЛЕВСКИЙ Михаил Маркович, БОРИСОВ Андрей Владимирович
МПК / Мітки
Мітки: корисного, вантажу, спосіб, виведення, системою, авіаційно-космічною, управління
Код посилання
<a href="https://ua.patents.su/5-56365-sposib-upravlinnya-aviacijjno-kosmichnoyu-sistemoyu-dlya-vivedennya-korisnogo-vantazhu.html" target="_blank" rel="follow" title="База патентів України">Спосіб управління авіаційно-космічною системою для виведення корисного вантажу</a>
Спосіб виведення корисного навантаження на орбіту в космос
Номер патенту: 51485
Опубліковано: 15.11.2002
Автори: Коваленко Борис Якович, Сідельников Леонід Павлович, Мельничук Вячеслав Валерійович, Лепескин Ігор Борисович, Майданюк Дмитро Вікторович, Легеза Володимир Семенович
МПК: B64D 5/00
Мітки: виведення, орбіту, спосіб, космос, корисного, навантаження
Формула / Реферат:
1. Спосіб виведення корисного навантаження на орбіту в космос, що включає рух літака з ракетою до точки відділення ракети, виконання після досягнення заданої швидкості польоту, висоти і географічних координат маневру «гірка» і відділення ракети при досягненні необхідного кута тангажа і нульового кута атаки, рух ракети від моменту видачі команди на відділення ракети до моменту запуску двигуна, з наступнимвиходом її в площину виведення, який...
Система виведення корисного навантаження на низьку орбіту
Номер патенту: 49922
Опубліковано: 15.10.2002
Автори: Вурст Стефан Дж., Скотт Гаррі
Мітки: низьку, виведення, орбіту, корисного, навантаження, система
Формула / Реферат:
1. Система виведення корисного навантаження на низьку орбіту, що має перший та другий ступінь запуску, з яких перший ступінь виконано у вигляді літака з турбовентиляторним двигуном, оснащеного засобом для перевезення та випуску другого ступеня, яка відрізняється тим, що другий ступінь виконано у вигляді аерокосмічного апарата, що містить фюзеляж з носовою частиною, середньою частиною, де знаходиться вантажний відсік, який має кілька cтулок,...
Авіаційно-космічна система
Номер патенту: 56364
Опубліковано: 15.05.2003
Автори: Рачук Владімір Сєргєєвіч, Монахов Юрій Владіміровіч, Ковалєвскій Міхаіл Марковіч, Іванов Робєрт Константіновіч, Борісов Андрєй Владіміровіч, Карпов Анатолій Стєпановіч
Мітки: система, авіаційно-космічна
Формула / Реферат:
Авіаційно-космічна система, що містить літак-носій 1, ракету-носій 2, корисне навантаження 3, яка відрізняється тим, що ракета-носій 2 з рідинними ракетними рушійними установками 4, розміщена всередині фюзеляжу 5 літака-носія 1 в транспортно-пусковому контейнері 6 з теплоізоляцією 18 за допомогою установних елементів 12 принаймні в двох поясах, між глухим торцем 13 транспортно-пускового контейнера 6 і торцем ракети-носія 2 утворена герметична...
Спосіб контролю систем управління ракет
Номер патенту: 31113
Опубліковано: 15.12.2000
Автори: Кузьмін В'ячеслав Павлович, Косовенко Євген Вікторович, Доценко Борис Іванович, Семенов Леонід Антонович
МПК: G05B 23/02
Мітки: управління, систем, ракет, спосіб, контролю
Формула / Реферат:
Спосіб контролю систем управління ракет, який полягає у дії керуючого сигналу на вхід контрольованої системи, імітації ракети, як об’єкта управління, визначенні як інформативного параметра промаху ракети, що відрізняється тим, що керуючий сигнал формують залежно від поточного відхилення ракети від заданих координат, а параметри ракети, як об'єкта управління, змінюють у часі згідно з заданим законом.
Літальний апарат з системою автоматичного управління за висотою
Номер патенту: 39261
Опубліковано: 15.06.2001
Автори: Соловей Віктор Васильйович, Макаров Олександр Олександрович, Сметанкін Олександр Володимирович, Стрелков Ігор Васильович
МПК: G05D 1/00
Мітки: висотою, автоматичного, апарат, системою, управління, літальний
Формула / Реферат:
Літальний апарат з системою автоматичного управління за висотою, який відрізняється тим, що він має пристрій, що містить герметичний сильфон, який наповнений речовиною з високим коефіцієнтом температурного розширення, демпфер і пружину, які паралельно та жорстко з'єднані між собою, та встановлений в горизонтальному оперенні уздовж хорди стабілізатора, яка проходить крізь центр тиску стабілізатора, кінематично пов'язаного з останнім та з...
Попередній патент: Авіаційно-космічна система
Наступний патент: Спосіб одержання лікарського засобу з плацентарних тканин
Випадковий патент: Електронно-променева установка для відцентрового лиття