Лінійний п’єзоелектричний мотор
Номер патенту: 84885
Опубліковано: 11.11.2013
Автори: Лавріненко Ивана Вячеславівна, Лавріненко В'ячеслав Васильович

Формула / Реферат
1. Лінійний п'єзоелектричний мотор, що містить дві взаємно рухомі фрикційно взаємодіючі між собою частини, одна з яких містить п'єзоелемент з електродами і виводами для підключення до одного або двох джерел електричної напруги, який відрізняється тим, що вкладається третя частина, що взаємодіє фрикційно з частиною, яка містить п'єзоелемент.
2. Лінійний п'єзоелектричний мотор за п. 1, який відрізняється тим, що п'єзоелемент має вигляд прямокутної пластини з електродами, виконаними з умови одночасного збудження першої моди повздовжніх коливань по ширині пластини і третьої моди повздовжніх коливань по довжині пластини.
3. Лінійний п'єзоелектричний мотор за п. 1, який відрізняється тим, що п'єзоелемент має вигляд квадратної пластини з електродами, виконаними з умови збудження першої моди повздовжніх коливань або першої моди згинальних коливань по боці квадрата при почерговому підключенні виводів до двох джерел живлення з різною частотою.
Текст
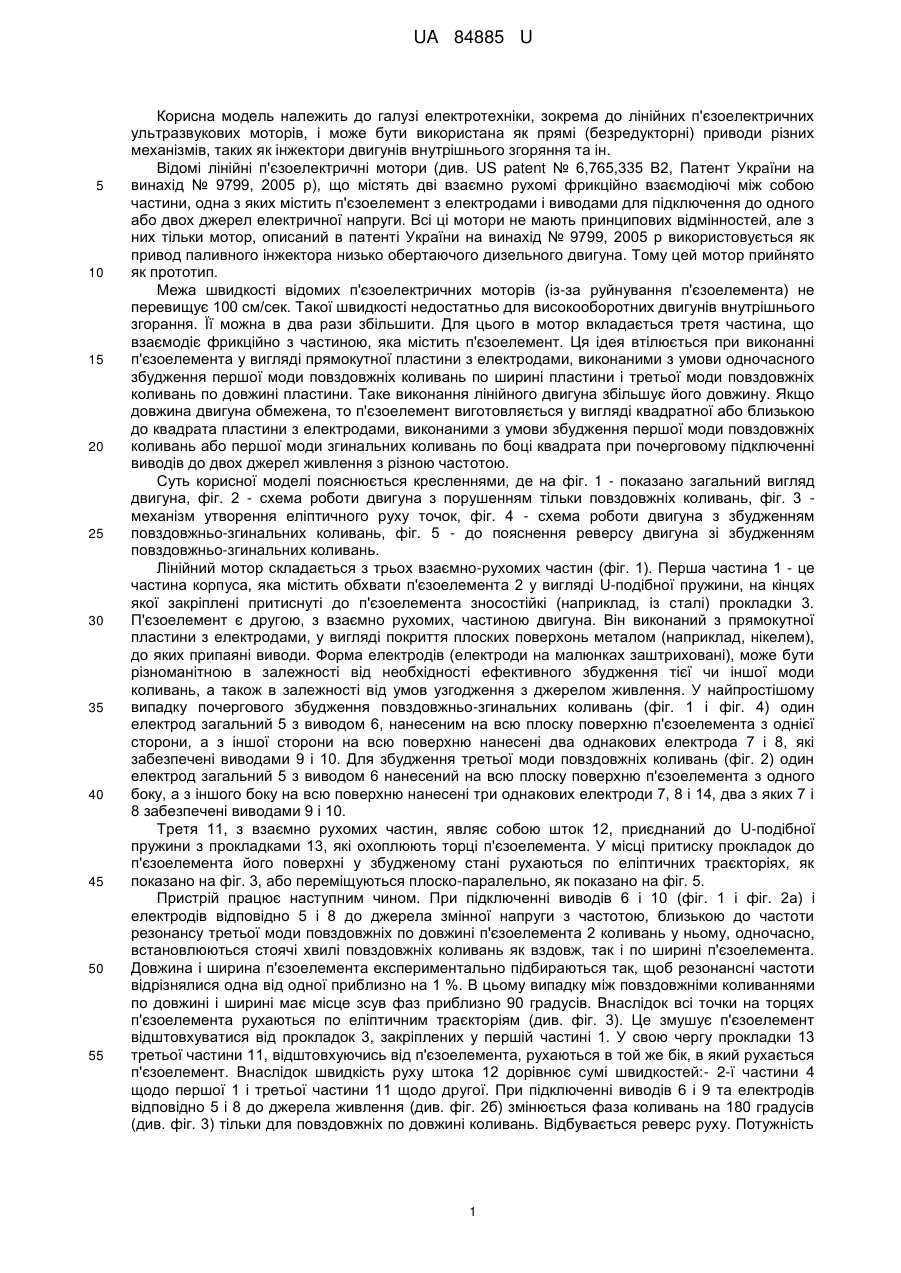
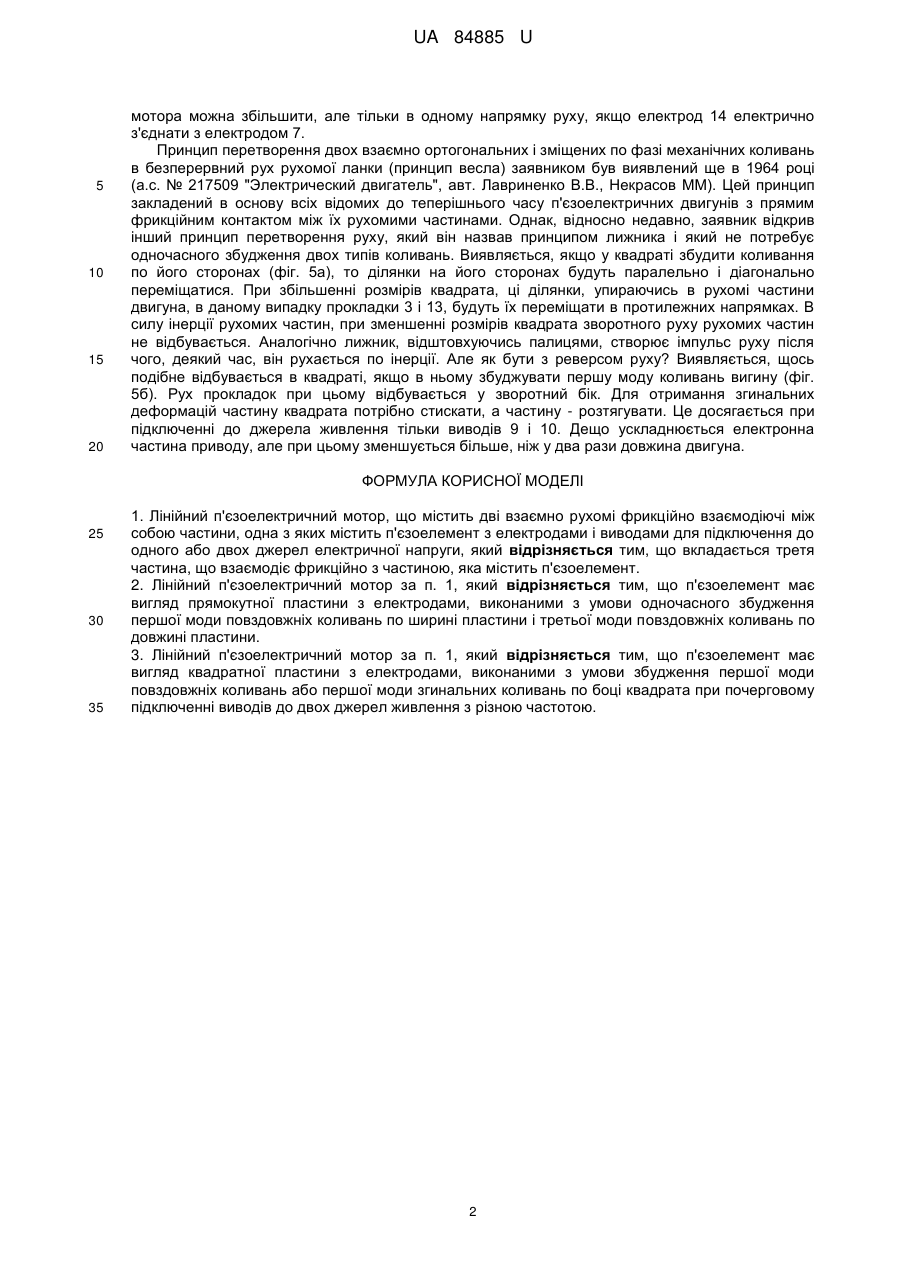
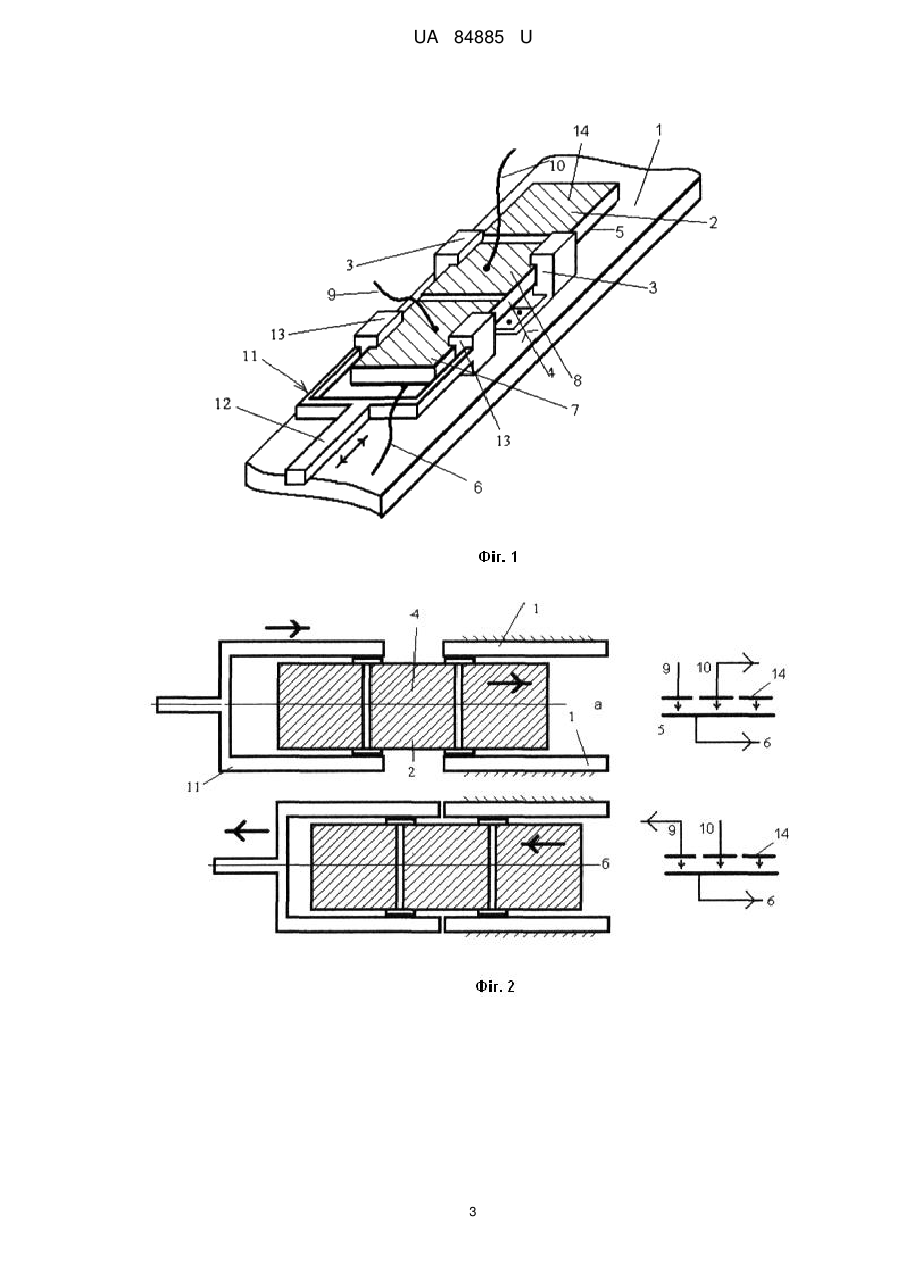
Реферат: UA 84885 U UA 84885 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі електротехніки, зокрема до лінійних п'єзоелектричних ультразвукових моторів, і може бути використана як прямі (безредукторні) приводи різних механізмів, таких як інжектори двигунів внутрішнього згоряння та ін. Відомі лінійні п'єзоелектричні мотори (див. US patent № 6,765,335 В2, Патент України на винахід № 9799, 2005 р), що містять дві взаємно рухомі фрикційно взаємодіючі між собою частини, одна з яких містить п'єзоелемент з електродами і виводами для підключення до одного або двох джерел електричної напруги. Всі ці мотори не мають принципових відмінностей, але з них тільки мотор, описаний в патенті України на винахід № 9799, 2005 р використовується як привод паливного інжектора низько обертаючого дизельного двигуна. Тому цей мотор прийнято як прототип. Межа швидкості відомих п'єзоелектричних моторів (із-за руйнування п'єзоелемента) не перевищує 100 см/сек. Такої швидкості недостатньо для високооборотних двигунів внутрішнього згорання. Її можна в два рази збільшити. Для цього в мотор вкладається третя частина, що взаємодіє фрикційно з частиною, яка містить п'єзоелемент. Ця ідея втілюється при виконанні п'єзоелемента у вигляді прямокутної пластини з електродами, виконаними з умови одночасного збудження першої моди повздовжніх коливань по ширині пластини і третьої моди повздовжніх коливань по довжині пластини. Таке виконання лінійного двигуна збільшує його довжину. Якщо довжина двигуна обмежена, то п'єзоелемент виготовляється у вигляді квадратної або близькою до квадрата пластини з електродами, виконаними з умови збудження першої моди повздовжніх коливань або першої моди згинальних коливань по боці квадрата при почерговому підключенні виводів до двох джерел живлення з різною частотою. Суть корисної моделі пояснюється кресленнями, де на фіг. 1 - показано загальний вигляд двигуна, фіг. 2 - схема роботи двигуна з порушенням тільки повздовжніх коливань, фіг. 3 механізм утворення еліптичного руху точок, фіг. 4 - схема роботи двигуна з збудженням повздовжньо-згинальних коливань, фіг. 5 - до пояснення реверсу двигуна зі збудженням повздовжньо-згинальних коливань. Лінійний мотор складається з трьох взаємно-рухомих частин (фіг. 1). Перша частина 1 - це частина корпуса, яка містить обхвати п'єзоелемента 2 у вигляді U-подібної пружини, на кінцях якої закріплені притиснуті до п'єзоелемента зносостійкі (наприклад, із сталі) прокладки 3. П'єзоелемент є другою, з взаємно рухомих, частиною двигуна. Він виконаний з прямокутної пластини з електродами, у вигляді покриття плоских поверхонь металом (наприклад, нікелем), до яких припаяні виводи. Форма електродів (електроди на малюнках заштриховані), може бути різноманітною в залежності від необхідності ефективного збудження тієї чи іншої моди коливань, а також в залежності від умов узгодження з джерелом живлення. У найпростішому випадку почергового збудження повздовжньо-згинальних коливань (фіг. 1 і фіг. 4) один електрод загальний 5 з виводом 6, нанесеним на всю плоску поверхню п'єзоелемента з однієї сторони, а з іншої сторони на всю поверхню нанесені два однакових електрода 7 і 8, які забезпечені виводами 9 і 10. Для збудження третьої моди повздовжніх коливань (фіг. 2) один електрод загальний 5 з виводом 6 нанесений на всю плоску поверхню п'єзоелемента з одного боку, а з іншого боку на всю поверхню нанесені три однакових електроди 7, 8 і 14, два з яких 7 і 8 забезпечені виводами 9 і 10. Третя 11, з взаємно рухомих частин, являє собою шток 12, приєднаний до U-подібної пружини з прокладками 13, які охоплюють торці п'єзоелемента. У місці притиску прокладок до п'єзоелемента його поверхні у збудженому стані рухаються по еліптичних траєкторіях, як показано на фіг. 3, або переміщуються плоско-паралельно, як показано на фіг. 5. Пристрій працює наступним чином. При підключенні виводів 6 і 10 (фіг. 1 і фіг. 2а) і електродів відповідно 5 і 8 до джерела змінної напруги з частотою, близькою до частоти резонансу третьої моди повздовжніх по довжині п'єзоелемента 2 коливань у ньому, одночасно, встановлюються стоячі хвилі повздовжніх коливань як вздовж, так і по ширині п'єзоелемента. Довжина і ширина п'єзоелемента експериментально підбираються так, щоб резонансні частоти відрізнялися одна від одної приблизно на 1 %. В цьому випадку між повздовжніми коливаннями по довжині і ширині має місце зсув фаз приблизно 90 градусів. Внаслідок всі точки на торцях п'єзоелемента рухаються по еліптичним траєкторіям (див. фіг. 3). Це змушує п'єзоелемент відштовхуватися від прокладок 3, закріплених у першій частині 1. У свою чергу прокладки 13 третьої частини 11, відштовхуючись від п'єзоелемента, рухаються в той же бік, в який рухається п'єзоелемент. Внаслідок швидкість руху штока 12 дорівнює сумі швидкостей:- 2-ї частини 4 щодо першої 1 і третьої частини 11 щодо другої. При підключенні виводів 6 і 9 та електродів відповідно 5 і 8 до джерела живлення (див. фіг. 2б) змінюється фаза коливань на 180 градусів (див. фіг. 3) тільки для повздовжніх по довжині коливань. Відбувається реверс руху. Потужність 1 UA 84885 U 5 10 15 20 мотора можна збільшити, але тільки в одному напрямку руху, якщо електрод 14 електрично з'єднати з електродом 7. Принцип перетворення двох взаємно ортогональних і зміщених по фазі механічних коливань в безперервний рух рухомої ланки (принцип весла) заявником був виявлений ще в 1964 році (а.с. № 217509 "Электрический двигатель", авт. Лавриненко В.В., Некрасов ММ). Цей принцип закладений в основу всіх відомих до теперішнього часу п'єзоелектричних двигунів з прямим фрикційним контактом між їх рухомими частинами. Однак, відносно недавно, заявник відкрив інший принцип перетворення руху, який він назвав принципом лижника і який не потребує одночасного збудження двох типів коливань. Виявляється, якщо у квадраті збудити коливання по його сторонах (фіг. 5а), то ділянки на його сторонах будуть паралельно і діагонально переміщатися. При збільшенні розмірів квадрата, ці ділянки, упираючись в рухомі частини двигуна, в даному випадку прокладки 3 і 13, будуть їх переміщати в протилежних напрямках. В силу інерції рухомих частин, при зменшенні розмірів квадрата зворотного руху рухомих частин не відбувається. Аналогічно лижник, відштовхуючись палицями, створює імпульс руху після чого, деякий час, він рухається по інерції. Але як бути з реверсом руху? Виявляється, щось подібне відбувається в квадраті, якщо в ньому збуджувати першу моду коливань вигину (фіг. 5б). Рух прокладок при цьому відбувається у зворотний бік. Для отримання згинальних деформацій частину квадрата потрібно стискати, а частину - розтягувати. Це досягається при підключенні до джерела живлення тільки виводів 9 і 10. Дещо ускладнюється електронна частина приводу, але при цьому зменшується більше, ніж у два рази довжина двигуна. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 1. Лінійний п'єзоелектричний мотор, що містить дві взаємно рухомі фрикційно взаємодіючі між собою частини, одна з яких містить п'єзоелемент з електродами і виводами для підключення до одного або двох джерел електричної напруги, який відрізняється тим, що вкладається третя частина, що взаємодіє фрикційно з частиною, яка містить п'єзоелемент. 2. Лінійний п'єзоелектричний мотор за п. 1, який відрізняється тим, що п'єзоелемент має вигляд прямокутної пластини з електродами, виконаними з умови одночасного збудження першої моди повздовжніх коливань по ширині пластини і третьої моди повздовжніх коливань по довжині пластини. 3. Лінійний п'єзоелектричний мотор за п. 1, який відрізняється тим, що п'єзоелемент має вигляд квадратної пластини з електродами, виконаними з умови збудження першої моди повздовжніх коливань або першої моди згинальних коливань по боці квадрата при почерговому підключенні виводів до двох джерел живлення з різною частотою. 2 UA 84885 U 3 UA 84885 U 4 UA 84885 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: H01L 41/09, H02N 2/10
Мітки: п'єзоелектричний, мотор, лінійний
Код посилання
<a href="https://ua.patents.su/7-84885-linijjnijj-pehzoelektrichnijj-motor.html" target="_blank" rel="follow" title="База патентів України">Лінійний п’єзоелектричний мотор</a>
Підвісний човновий мотор

Номер патенту: 73279
Опубліковано: 15.07.2005
Автори: Кузнєцов Сєргєй Євгєньєвіч, Андрєєв Андрєй Владіміровіч, Лобусов Олег Васильович
МПК: B63H 23/00, B63H 20/00
Мітки: підвісний, човновий, мотор
Формула / Реферат:
Підвісний човновий мотор, якій має двигун, дейдвуд, трансмісійний вал, вал гвинта та реверс - редуктор, який відрізняється тим, що реверс - редуктор розміщено у дейдвуді вище антикавітаційної пластини, а між трансмісійним валом та валом гвинта встановлено кутову передачу.
Підвісний човновий мотор з двоконтурною системою охолодження
Номер патенту: 73278
Опубліковано: 15.07.2005
Автори: Лобусов Олег Васильович, Андрєєв Андрєй Владіміровіч, Кузнєцов Сєргєй Євгєньєвіч
МПК: B63H 20/00, F01P 5/00, B63H 21/00
Мітки: системою, двоконтурною, човновий, охолодження, підвісний, мотор
Формула / Реферат:
Підвісний човновий мотор з двоконтурною системою охолодження, який містить двигун та дейдвуд, перший контур охолодження, утворений системою охолодження двигуна, та другий контур охолодження, який відрізняється тим, що перший контур охолодження включає з’єднаний з системою охолодження двигуна теплообмінник, розташований у порожнині дейдвуда нижче ватерлінії, а другий контур охолодження виконаний з можливістю циркуляції у ньому забортної води...
Лінійний хвильовий п’єзоелектричний двигун
Номер патенту: 10733
Опубліковано: 15.11.2005
Автор: Лавріненко В'ячеслав Васильович
МПК: H02N 2/00, F02M 51/06, H01L 41/09, F02M 47/00
Мітки: лінійний, хвильовий, двигун, п'єзоелектричний
Формула / Реферат:
Лінійний хвильовий п'єзоелектричний двигун, що містить дві притиснуті одна до одної однією або двома плоскими фрикційними поверхнями дві частини з можливістю їх взаємного зміщення, одна з яких є п'єзоелемент у формі бруска з трьома парами електродів на плоских протилежних поверхнях, крайні з яких перехресно з'єднані між собою, між якими розміщена третя пара електродів, який відрізняється тим, що брусок виконаний з одного матеріалу постійного...
П’єзоелектричний мотор
Номер патенту: 65670
Опубліковано: 12.12.2011
Автори: Лавріненко В'ячеслав Васильович, Мірошниченко Анатолій Петрович, Шорохов Артем Євгенович
МПК: H02N 2/00, H01L 41/09
Мітки: мотор, п'єзоелектричний
Формула / Реферат:
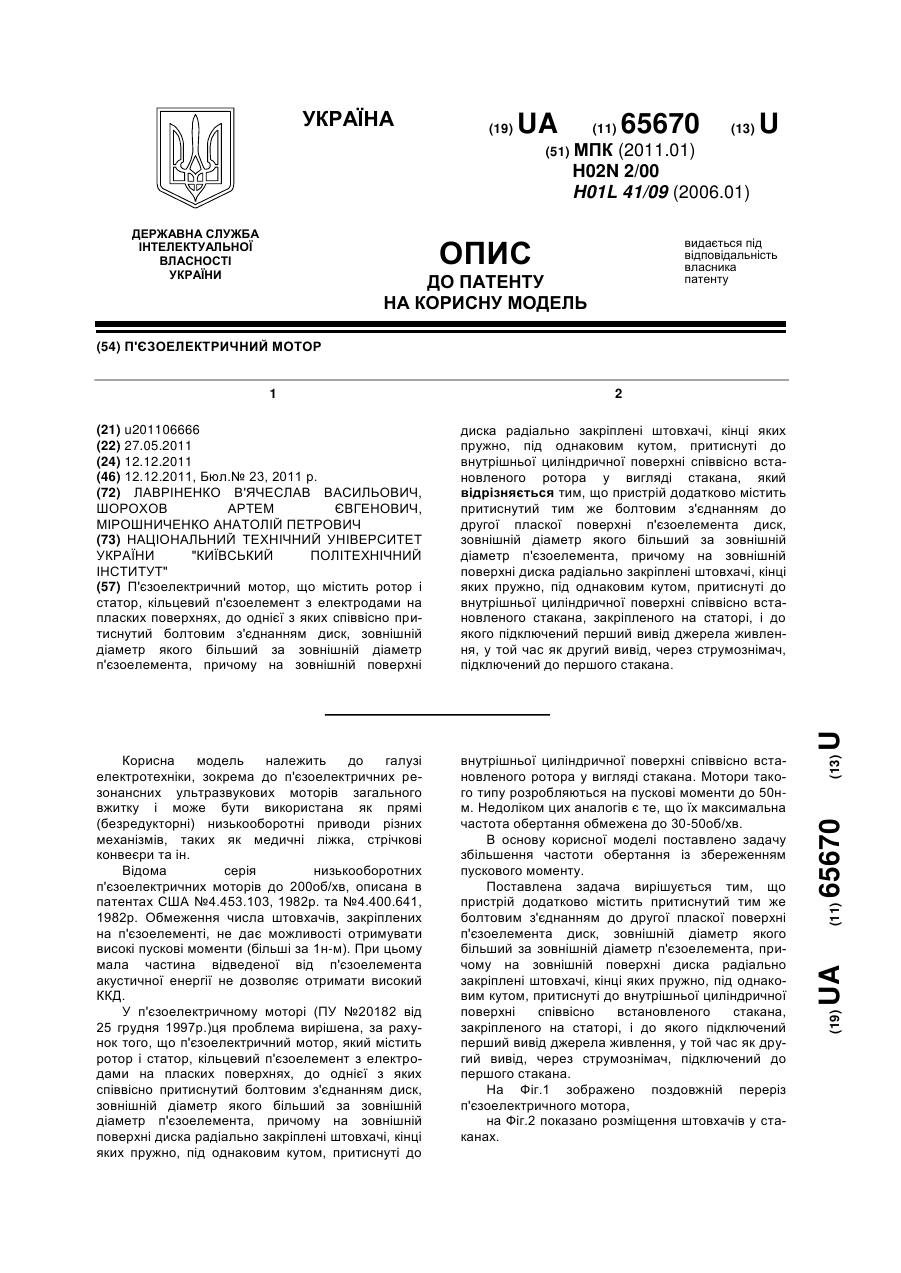
П'єзоелектричний мотор, що містить ротор і статор, кільцевий п'єзоелемент з електродами на пласких поверхнях, до однієї з яких співвісно притиснутий болтовим з'єднанням диск, зовнішній діаметр якого більший за зовнішній діаметр п'єзоелемента, причому на зовнішній поверхні диска радіально закріплені штовхачі, кінці яких пружно, під однаковим кутом, притиснуті до внутрішньої циліндричної поверхні співвісно встановленого ротора у вигляді...
Лінійний електричний двигун постійного струму
Номер патенту: 66877
Опубліковано: 25.01.2012
Автори: Косенков Володимир Данилович, Скубій Леонід В'ячеславович
МПК: H02K 41/02
Мітки: двигун, струму, постійного, лінійний, електричний
Формула / Реферат:
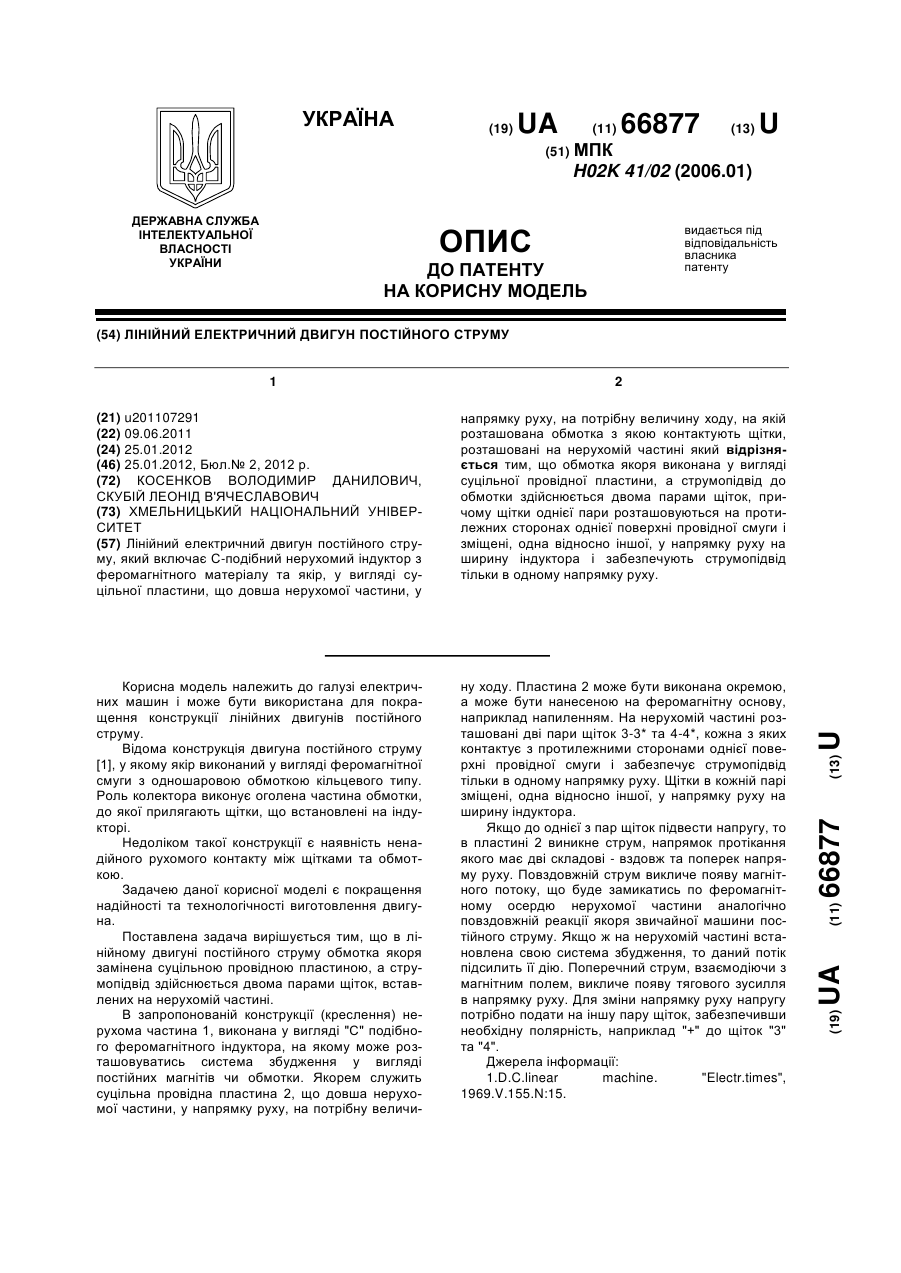
Лінійний електричний двигун постійного струму, який включає С-подібний нерухомий індуктор з феромагнітного матеріалу та якір, у вигляді суцільної пластини, що довша нерухомої частини, у напрямку руху, на потрібну величину ходу, на якій розташована обмотка з якою контактують щітки, розташовані на нерухомій частині який відрізняється тим, що обмотка якоря виконана у вигляді суцільної провідної пластини, а струмопідвід до обмотки здійснюється...
Попередній патент: Спосіб реалізації мостового землеробства
Наступний патент: Лінійний п’єзоелектричний мотор
Випадковий патент: Пристрій для визначення властивостей порід в процесі буріння