Лінійний п’єзоелектричний мотор
Номер патенту: 84886
Опубліковано: 11.11.2013
Автори: Лавріненко В'ячеслав Васильович, Коваль Віталій Степанович, Лавріненко Ивана Вячеславівна

Формула / Реферат
1. Лінійний п'єзоелектричний мотор, що має дві частини, одна з яких містить п'єзоелемент у вигляді пластини з металевими покриттями на основних плоских поверхнях, що утворюють електроди з виводами для підключення до джерела змінної напруги, притиснутий безпосередньо або через зносостійку прокладку до іншої частини, який відрізняється тим, що п'єзоелемент виконано у вигляді кільця, з співвідношенням зовнішнього і внутрішнього діаметра, вибраного із умови одночасного збудження резонансу радіальних коливань і резонансу поздовжніх коливань по довжині кола кільця, що відповідає тому, що по довжині кола укладається одна довжина хвилі.
2. Лінійний п'єзоелектричний мотор за п. 1, який відрізняється тим, що п'єзоелемент виконаний із співвідношенням зовнішнього діаметра до внутрішнього в межах від 3 до 4.
3. Лінійний п'єзоелектричний мотор за п. 1 та 2, який відрізняється тим, що з одного боку п'єзоелемента нанесено суцільний електрод, а з іншого боку нанесені два однакових електроди для почергового підключення їх до джерела змінної напруги з формою і розташуванням кожного з умови максимальної ефективності збудження поздовжніх коливань по довжині кола.
4. Лінійний п'єзоелектричний мотор за п. 1 та 2, який відрізняється тим, що з кожного боку п'єзоелемента нанесені два однакових концентрично розташованих електроди, для одночасного їх підключення до джерела змінної напруги, причому щонайменше один з електродів розділений навпіл непровідним проміжком, а його виводи з'єднані з умови максимальної ефективності збудження поздовжніх коливань по довжині кола.
Текст
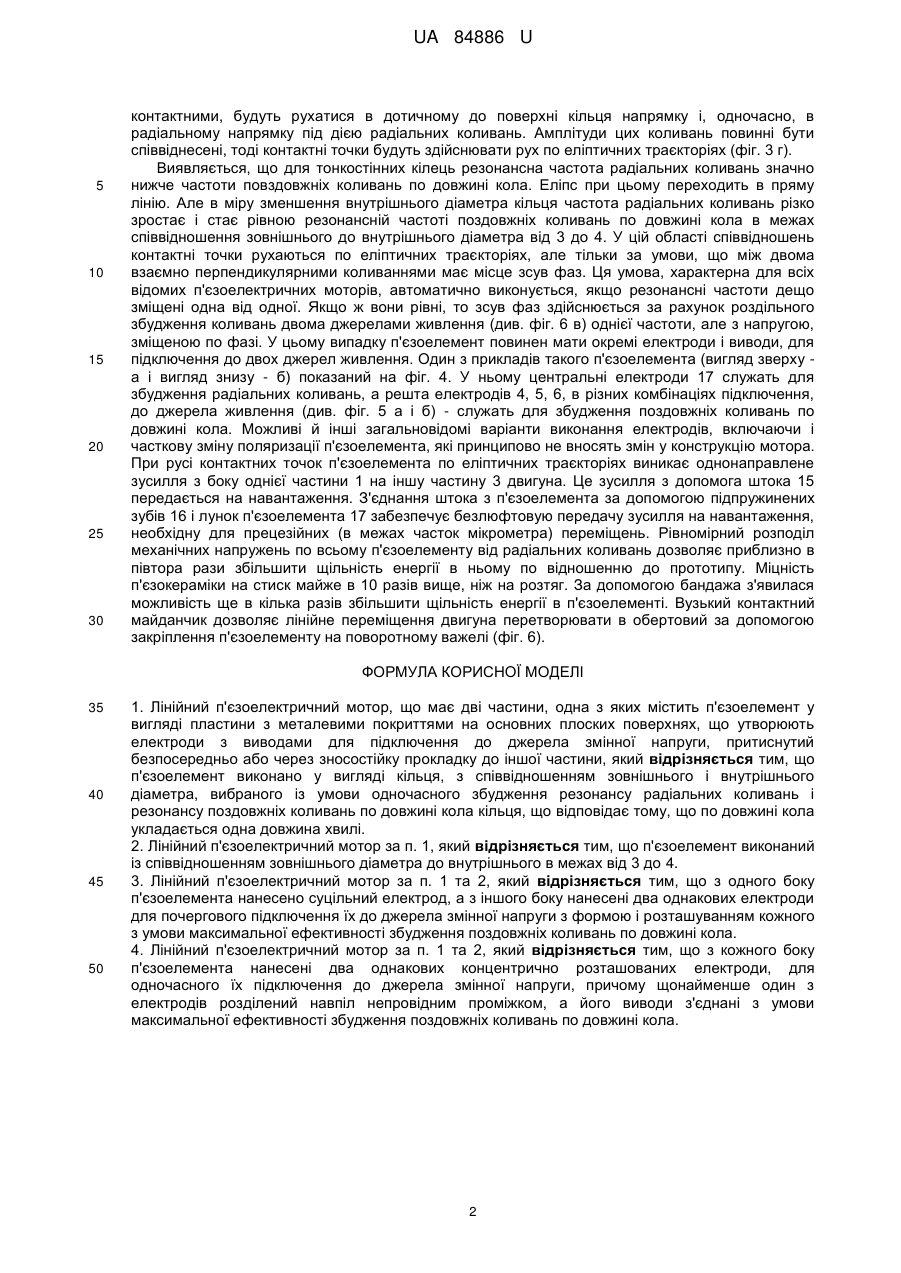
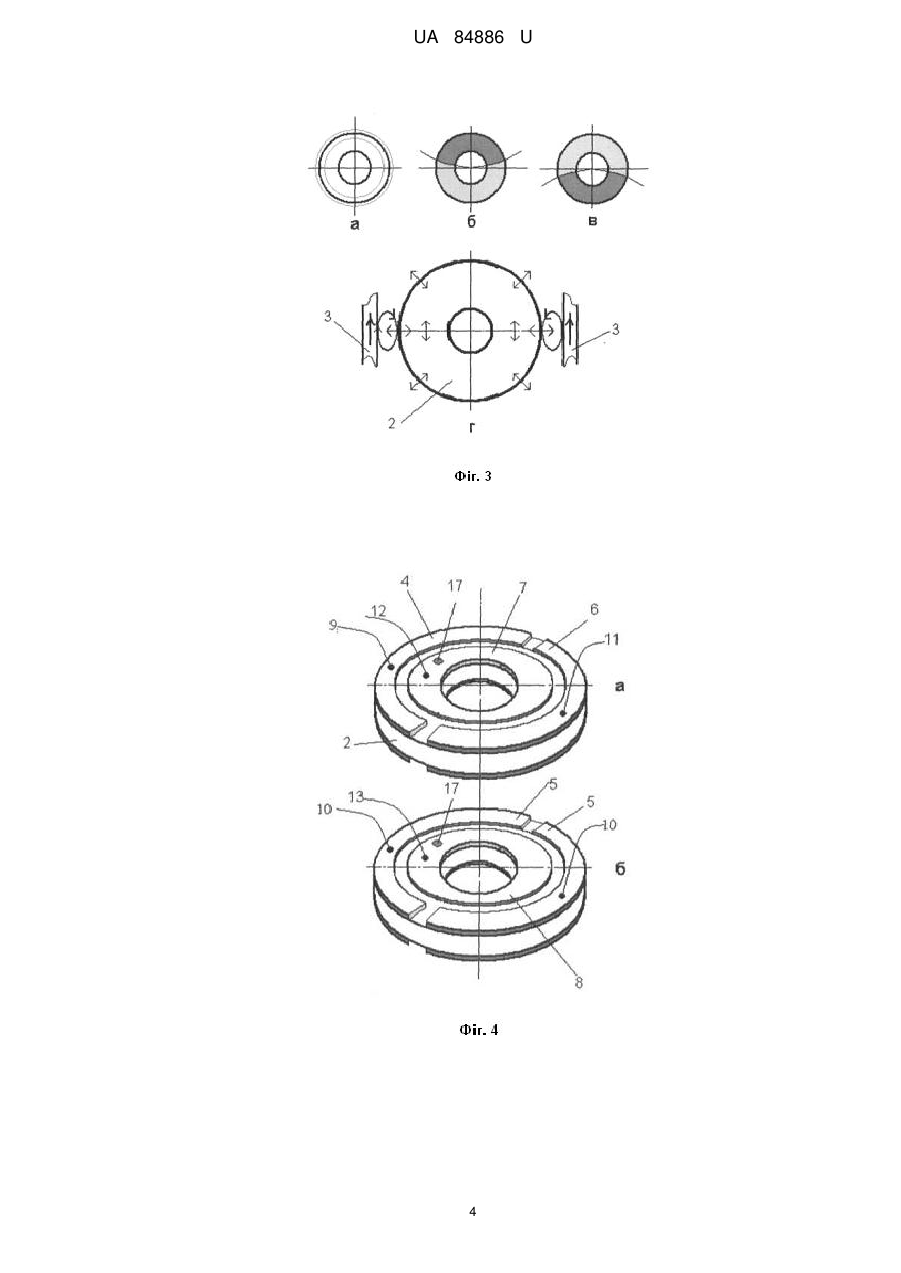
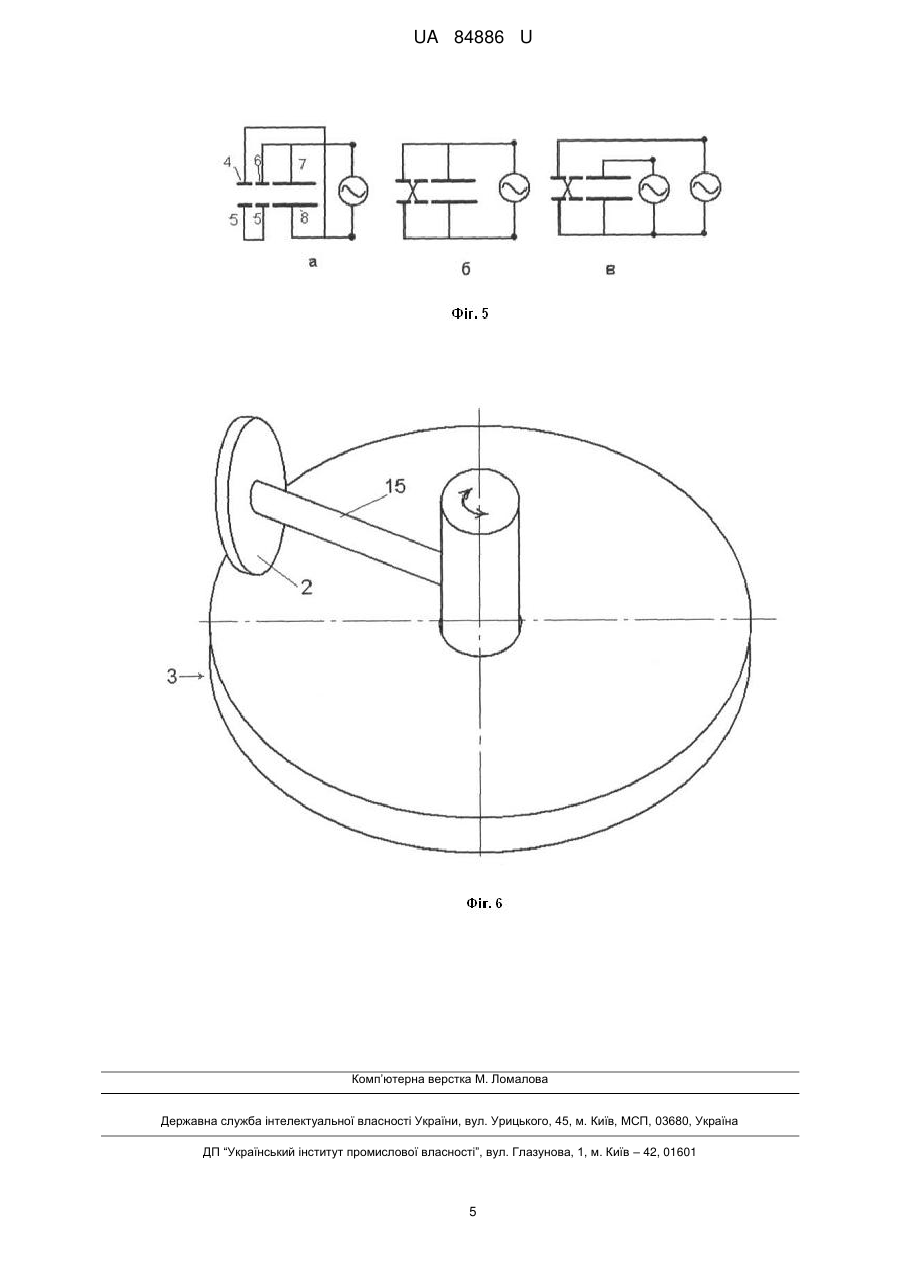
Реферат: UA 84886 U UA 84886 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі електротехніки, зокрема лінійних п'єзоелектричних ультразвукових моторів, і може бути використана як прямі приводи різних механізмів, наприклад, у виробництві металообробних верстатів. У патенті США № 6,765,335 В2 описаний широкий ряд лінійних п'єзоелектричних моторів, що мають дві частини, одна з яких містить п'єзоелемент у вигляді пластини з металевими покриттями на основних плоских поверхнях, що утворюють електроди з виводами для підключення до джерела змінної напруги, притиснутий безпосередньо або через зносостійку прокладку до іншої частини. Найпростіший з них у вигляді прямокутної пластини з збудженням першої моди по ширині і другої моди по довжині поздовжніх коливань, взято в якості прототипу. У цьому моторі коливання по ширині п'єзоелемента збуджуються по всій його довжині, але тільки вузькі ділянки цієї довжини використовуються для формування еліпса руху точок п'єзоелемента в місці фрикційного контакту двох частин. Витрачена енергія на збудження п'єзоелемента за межами цих частин не перетворюється на роботу на навантаженні, що є однією з причин низького коефіцієнта корисної дії двигуна. Крім того, потрібно відзначити, що максимальна потужність двигуна залежить не тільки від цього коефіцієнта, але також обмежена руйнуванням п'єзоелемента. У прототипі відбувається складання двох максимумів механічних напружень по довжині і ширині п'єзоелемента. Утворюються два горби механічних напруг, що віддалені від бічних кордонів приблизно на одну чверть довжини п'єзоелемента. Коефіцієнт корисної дії і потужність зростають, якщо п'єзоелемент виконаний у вигляді кільця, з співвідношенням зовнішнього і внутрішнього діаметра, вибраного із умови одночасного збудження резонансу радіальних коливань і резонансу поздовжніх коливань по довжині кола кільця, що відповідає тому, що по довжині кола укладається одна довжина хвилі. Максимальний ефект при цьому досягається тоді, коли п'єзоелемент виконаний із співвідношенням зовнішнього діаметра до внутрішнього в межах від 3 до 4. Для одночасного збудження радіальних і поздовжніх коливань по довжині кола з одного боку п'єзоелемента нанесено суцільний електрод, а з іншого боку нанесені два однакових електрода для почергового підключення їх до джерела змінної напруги з формою і розташуванням кожного з умови максимальної ефективності збудження поздовжніх коливань по довжині кола. Така форма і розташування електродів передбачає просту схему перемикання електродів при реверсі руху мотора. При цьому електрично збуджується тільки половина об'єму п'єзоелемента, що тягне за собою збільшення напруги джерела змінної напруги. Щоб електрично збудити весь об'єм п'єзоелемента, з кожного боку п'єзоелемента нанесені два однакових концентрично розташованих електроди, для одночасного їх підключення до джерела змінної напруги, причому щонайменше один з електродів розділений навпіл непровідним проміжком, а його виводи з'єднані з умови максимальної ефективності збудження поздовжніх коливань по довжині кола. Суть корисної моделі пояснюється кресленнями, де на фіг. 1 показаний мотор в збірці, на фіг. 2 - п'єзоелемент з трьома електродами, на фіг. 3 - механізм утворення еліпсів, на фіг. 4 п'єзоелемент з 6-ма електродами, вигляд зверху - а і вигляд знизу - б, на фіг. 5 - схема з'єднання електродів: а - при підключені п'єзоелемента до одного, б - до двох джерел живлення і на фіг. 6 - приклад використання лінійного двигуна. Частина 1 (фіг. 1), що містить п'єзоелемент 2 у вигляді плоского кільця, у даній конструкції двигуна виконана рухомою щодо другої частини 3, яка частіше використовується для закріплення двигуна. П'єзоелемент виконаний з п'єзокераміки, наприклад ЦТС-24. На його плоскі поверхні нанесені металеві покриття, наприклад нікель. Ці покриття є електродами 4-8, виводи від яких 9-13 (див. також фіг. 2 і фіг. 3) служать для підключення до джерела змінної напруги за схемами, показаним на фіг. 4. П'єзоелемент встановлюється в направляючих рейках 14, закріплених на U-подібній тонкостінній, наприклад, сталевій пружині. Зусилля від п'єзоелемента до навантаження передається за допомогою штока 15, зуби 16 якого підпружинені і входять в лунки 17 на п'єзоелементі. Закріплення п'єзоелемента на поворотній штанзі (фіг. 5) дозволяє його лінійний рух перетворювати в обертовий. Працює пристрій наступним чином. Через виводи, наприклад, 4, 5 змінну напругу від джерела живлення подається на електроди 9, 10 п'єзоелемента 2. Зарахунок зворотного п'єзоефекту, п'єзоелемент поступово деформується. На кордонах електродів зароджуються ряди хвиль поздовжніх деформацій, як в радіальному напрямку, так і по колу кільця. На певних частотах, які називають резонансними, ці хвилі посилюються по амплітуді. Під дією радіальних хвиль торцеві поверхні кільця будуть переміщатися в радіальному напрямку, як показано на Фіг. 2 а. Під дією поздовжніх хвиль по довжині кола відбувається зміщення радіальних площин (див. Фіг. 3 б і в). Максимум коливальних швидкостей буде у точок, які знаходяться в площині, що ділить п'єзоелемент на дві рівні частини. Точки торцевої поверхні кільця, що знаходяться біля цієї площини, які назвемо 1 UA 84886 U 5 10 15 20 25 30 контактними, будуть рухатися в дотичному до поверхні кільця напрямку і, одночасно, в радіальному напрямку під дією радіальних коливань. Амплітуди цих коливань повинні бути співвіднесені, тоді контактні точки будуть здійснювати рух по еліптичних траєкторіях (фіг. 3 г). Виявляється, що для тонкостінних кілець резонансна частота радіальних коливань значно нижче частоти повздовжніх коливань по довжині кола. Еліпс при цьому переходить в пряму лінію. Але в міру зменшення внутрішнього діаметра кільця частота радіальних коливань різко зростає і стає рівною резонансній частоті поздовжніх коливань по довжині кола в межах співвідношення зовнішнього до внутрішнього діаметра від 3 до 4. У цій області співвідношень контактні точки рухаються по еліптичних траєкторіях, але тільки за умови, що між двома взаємно перпендикулярними коливаннями має місце зсув фаз. Ця умова, характерна для всіх відомих п'єзоелектричних моторів, автоматично виконується, якщо резонансні частоти дещо зміщені одна від одної. Якщо ж вони рівні, то зсув фаз здійснюється за рахунок роздільного збудження коливань двома джерелами живлення (див. фіг. 6 в) однієї частоти, але з напругою, зміщеною по фазі. У цьому випадку п'єзоелемент повинен мати окремі електроди і виводи, для підключення до двох джерел живлення. Один з прикладів такого п'єзоелемента (вигляд зверху а і вигляд знизу - б) показаний на фіг. 4. У ньому центральні електроди 17 служать для збудження радіальних коливань, а решта електродів 4, 5, 6, в різних комбінаціях підключення, до джерела живлення (див. фіг. 5 а і б) - служать для збудження поздовжніх коливань по довжині кола. Можливі й інші загальновідомі варіанти виконання електродів, включаючи і часткову зміну поляризації п'єзоелемента, які принципово не вносять змін у конструкцію мотора. При русі контактних точок п'єзоелемента по еліптичних траєкторіях виникає однонаправлене зусилля з боку однієї частини 1 на іншу частину 3 двигуна. Це зусилля з допомога штока 15 передається на навантаження. З'єднання штока з п'єзоелемента за допомогою підпружинених зубів 16 і лунок п'єзоелемента 17 забезпечує безлюфтовую передачу зусилля на навантаження, необхідну для прецезійних (в межах часток мікрометра) переміщень. Рівномірний розподіл механічних напружень по всьому п'єзоелементу від радіальних коливань дозволяє приблизно в півтора рази збільшити щільність енергії в ньому по відношенню до прототипу. Міцність п'єзокераміки на стиск майже в 10 разів вище, ніж на розтяг. За допомогою бандажа з'явилася можливість ще в кілька разів збільшити щільність енергії в п'єзоелементі. Вузький контактний майданчик дозволяє лінійне переміщення двигуна перетворювати в обертовий за допомогою закріплення п'єзоелементу на поворотному важелі (фіг. 6). ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 45 50 1. Лінійний п'єзоелектричний мотор, що має дві частини, одна з яких містить п'єзоелемент у вигляді пластини з металевими покриттями на основних плоских поверхнях, що утворюють електроди з виводами для підключення до джерела змінної напруги, притиснутий безпосередньо або через зносостійку прокладку до іншої частини, який відрізняється тим, що п'єзоелемент виконано у вигляді кільця, з співвідношенням зовнішнього і внутрішнього діаметра, вибраного із умови одночасного збудження резонансу радіальних коливань і резонансу поздовжніх коливань по довжині кола кільця, що відповідає тому, що по довжині кола укладається одна довжина хвилі. 2. Лінійний п'єзоелектричний мотор за п. 1, який відрізняється тим, що п'єзоелемент виконаний із співвідношенням зовнішнього діаметра до внутрішнього в межах від 3 до 4. 3. Лінійний п'єзоелектричний мотор за п. 1 та 2, який відрізняється тим, що з одного боку п'єзоелемента нанесено суцільний електрод, а з іншого боку нанесені два однакових електроди для почергового підключення їх до джерела змінної напруги з формою і розташуванням кожного з умови максимальної ефективності збудження поздовжніх коливань по довжині кола. 4. Лінійний п'єзоелектричний мотор за п. 1 та 2, який відрізняється тим, що з кожного боку п'єзоелемента нанесені два однакових концентрично розташованих електроди, для одночасного їх підключення до джерела змінної напруги, причому щонайменше один з електродів розділений навпіл непровідним проміжком, а його виводи з'єднані з умови максимальної ефективності збудження поздовжніх коливань по довжині кола. 2 UA 84886 U 3 UA 84886 U 4 UA 84886 U Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюKoval Vitalii Stepanovych
Автори російськоюКоваль Виталий Степанович
МПК / Мітки
МПК: H01L 41/09, H02N 2/00
Мітки: п'єзоелектричний, мотор, лінійний
Код посилання
<a href="https://ua.patents.su/7-84886-linijjnijj-pehzoelektrichnijj-motor.html" target="_blank" rel="follow" title="База патентів України">Лінійний п’єзоелектричний мотор</a>
Лінійний п’єзоелектричний мотор
Номер патенту: 84885
Опубліковано: 11.11.2013
Автори: Лавріненко Ивана Вячеславівна, Лавріненко В'ячеслав Васильович
МПК: H01L 41/09, H02N 2/10
Мітки: мотор, лінійний, п'єзоелектричний
Формула / Реферат:
1. Лінійний п'єзоелектричний мотор, що містить дві взаємно рухомі фрикційно взаємодіючі між собою частини, одна з яких містить п'єзоелемент з електродами і виводами для підключення до одного або двох джерел електричної напруги, який відрізняється тим, що вкладається третя частина, що взаємодіє фрикційно з частиною, яка містить п'єзоелемент.2. Лінійний п'єзоелектричний мотор за п. 1, який відрізняється тим, що п'єзоелемент має вигляд...
Лінійний хвильовий п’єзоелектричний двигун
Номер патенту: 10733
Опубліковано: 15.11.2005
Автор: Лавріненко В'ячеслав Васильович
МПК: H01L 41/09, H02N 2/00, F02M 51/06, F02M 47/00
Мітки: хвильовий, п'єзоелектричний, двигун, лінійний
Формула / Реферат:
Лінійний хвильовий п'єзоелектричний двигун, що містить дві притиснуті одна до одної однією або двома плоскими фрикційними поверхнями дві частини з можливістю їх взаємного зміщення, одна з яких є п'єзоелемент у формі бруска з трьома парами електродів на плоских протилежних поверхнях, крайні з яких перехресно з'єднані між собою, між якими розміщена третя пара електродів, який відрізняється тим, що брусок виконаний з одного матеріалу постійного...
П’єзоелектричний мотор
Номер патенту: 65670
Опубліковано: 12.12.2011
Автори: Мірошниченко Анатолій Петрович, Шорохов Артем Євгенович, Лавріненко В'ячеслав Васильович
МПК: H02N 2/00, H01L 41/09
Мітки: п'єзоелектричний, мотор
Формула / Реферат:
П'єзоелектричний мотор, що містить ротор і статор, кільцевий п'єзоелемент з електродами на пласких поверхнях, до однієї з яких співвісно притиснутий болтовим з'єднанням диск, зовнішній діаметр якого більший за зовнішній діаметр п'єзоелемента, причому на зовнішній поверхні диска радіально закріплені штовхачі, кінці яких пружно, під однаковим кутом, притиснуті до внутрішньої циліндричної поверхні співвісно встановленого ротора у вигляді...
Лінійний індукційний прискорювач
Номер патенту: 64208
Опубліковано: 15.06.2005
Автори: Ложкін Руслан Сергіович, Корнілов Євген Олександрович, Алдакімов Олексій Сергіович, Гладченко Валентин Яковлевич, Гурин Анатолій Григорович
МПК: H05H 9/00, H05H 11/00
Мітки: індукційний, прискорювач, лінійний
Формула / Реферат:
1. Лінійний індукційний прискорювач, що містить корпус, інжектор електронів, прискорюючу магнітну систему, прискорюючу трубку з ізолятором, який відрізняється тим, що його магнітна система розташована всередині корпуса та має співвісні кільцеві одиночні магнітопроводи, які розташовані вздовж осі магнітної системи та зібрані у єдину конструкцію і розміщені у магнітному полі первинного витка, при цьому внутрішнє кільце співвісного кільцевого...
Лінійний двотактний двигун внутрішнього згорання
Номер патенту: 28427
Опубліковано: 10.12.2007
Автор: Безуглий Леонід Іванович
МПК: F02B 23/00
Мітки: лінійний, внутрішнього, згорання, двигун, двотактний
Формула / Реферат:
Лінійний двотактний двигун внутрішнього згорання, який містить картер, декілька прикріплених до нього співвісних циліндрів, шток з поршнями, кривошип (кривошипи), нерухоме колесо з внутрішніми зубцями, зчеплений з ним сателіт, який разом з кривошипом встановлений на валу, розташованому в отворах поворотної втулки, рухливо змонтованої в корпусі двигуна і виконуючої функцію його вихідної ланки, який відрізняється тим, що радіус ділильного кола...
Попередній патент: Лінійний п’єзоелектричний мотор
Наступний патент: Спосіб оперативного лікування гігром
Випадковий патент: Пристрій для триботехнічних випробувань циліндричних втулок