Система запобігання зіткнення автомобілів при виконанні маневру обгону
Номер патенту: 86134
Опубліковано: 10.12.2013
Автори: Абрамов Дмитрій Володимирович, Тесля Володимир Олегович, Подригало Михайло Абович

Формула / Реферат
Система для запобігання зіткнення автомобілів при виконанні обгону, що містить датчик поздовжнього ухилу дороги, обчислювач, що складається із блока визначення швидкості зближення з транспортним засобом (ТЗ), блока контролю відхилення поточного прискорення та швидкості ТЗ від прогнозованих значень, блока логіки, сигналізатори заборони та можливості здійснення обгону, яка відрізняється тим, що визначення швидкості зближення з ТЗ та його геометричних параметрів здійснюється двома радарами; розпізнавання дорожніх знаків, які обмежують швидкість руху на ділянці дороги або забороняють обгін здійснюється за допомогою відповідної відеокамери; визначення швидкості та прискорення здійснюється одночасно двома трикоординатними датчиками прискорення, інформація від яких дозволяє одержувати параметри швидкості ТЗ шляхом математичної обробки; передача, на якій здійснюється обгін визначається за допомогою відповідного датчика передачі, що дає можливість враховувати переключення передач під час обгону; додатково встановлено звукові та світлові сигналізатори необхідності збільшення інтенсивності розгону при обгоні, а також сигналізатори можливості безпечного здійснення маневру перестроювання на свою смугу руху; додатково застосовано блок керування гальмуванням, який виконує функції автоматичного гальмування автомобіля у разі виявлення небезпеки зіткнення; до обчислювача додатково включені блоки розпізнавання дорожніх знаків, визначення геометричних параметрів ТЗ або колони з двох і більше ТЗ, визначення потужності двигуна, визначення завантаження ТЗ, визначення максимальної потужності двигуна при поточному технічному стані та якості палива, визначення можливого прискорення та швидкості з урахуванням перемикання передач; є можливість застосування системи запобігання зіткнення на автомобілі, що рухається назустріч ТЗ, який здійснює обгін, та у разі виявлення небезпеки зіткнення - наявність попереджувальних звукових та світлових сигналів для водія або застосування примусового гальмування.
Текст
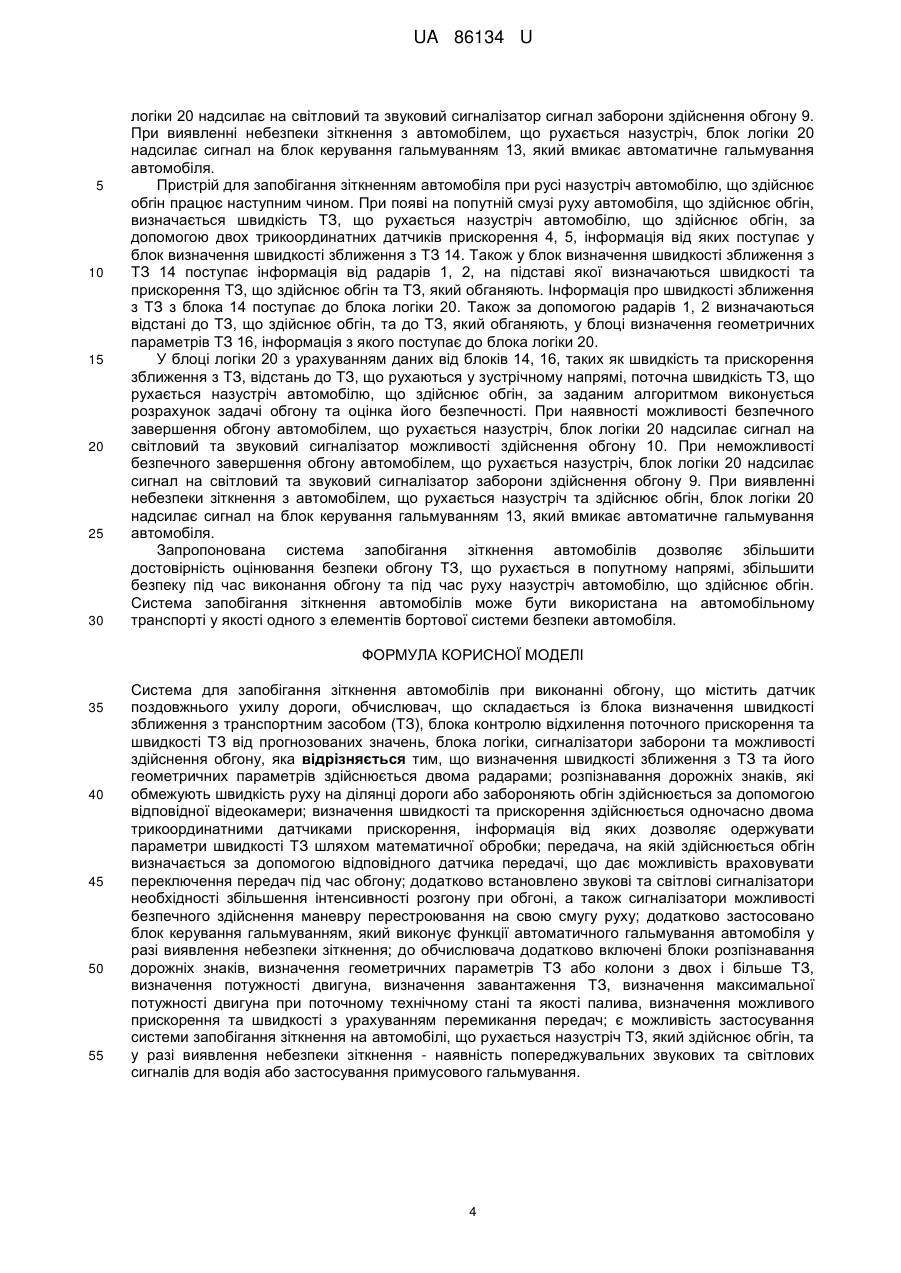
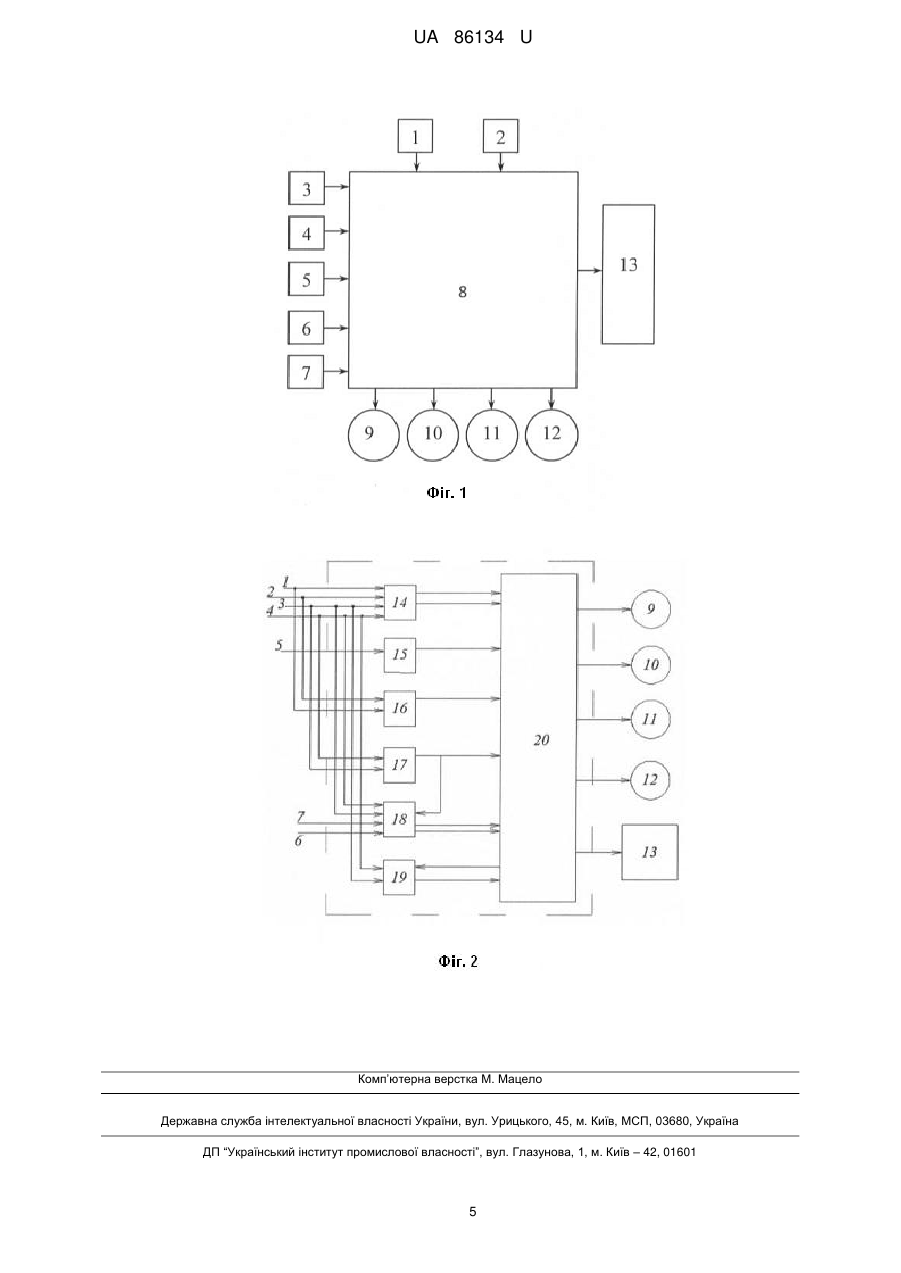
Реферат: Система для запобігання зіткнення автомобілів при виконанні обгону, що містить датчик поздовжнього ухилу дороги, обчислювач, що складається із блока визначення швидкості зближення з транспортним засобом (ТЗ), блока контролю відхилення поточного прискорення та швидкості ТЗ від прогнозованих значень, блока логіки, сигналізатори заборони та можливості здійснення обгону. Визначення швидкості зближення з ТЗ та його геометричних параметрів здійснюється двома радарами; додатково встановлено звукові та світлові сигналізатори, а також сигналізатори можливості безпечного здійснення маневру перестроювання на свою смугу руху; додатково застосовано блок керування гальмуванням. UA 86134 U (12) UA 86134 U UA 86134 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до пристроїв запобігання зіткнення автомобілів та інших транспортних засобів (ТЗ) при виконанні маневру обгону і може бути використана як один із елементів бортової системи безпеки. Відомий пристрій запобігання зіткнення автомобілів та інших ТЗ містить оптико-електронний перетворювач, що включає оптичний елемент, оптичний фільтр і чутливі елементи, додаткові опори, диференціальні підсилювачі, комутатор, блок визначення небезпечної відстані й генератор сигналів тривоги (Патент 2050561 РФ МПК G01S 15/08, G01S 17/93 Способ предотвращения столкновений автомобиля и устройство для его осуществления [Текст] / Б.П. Турченев; заявитель и патентообладатель Б.П. Турченев. - № 5044239/09; заявл. 26.05.1992; опубл. 20.12.1995). Відома система запобігання зіткнення автомобілів та інших ТЗ містить перший оптикоелектронний перетворювач, перший комутатор-визначник координат, блок визначення небезпечних відстаней, генератор сигналу тривоги, другий оптико-електронний перетворювач, обчислювач, перемикач введення інформації про геометричні розміри транспортного засобу, що рухається по смузі попутного руху, перший, другий, третій і четвертий світлові сигналізатори. Обчислювач складається із блока визначення швидкості зближення із транспортними засобами й блока логіки. Блок визначення швидкості зближення із транспортними засобами складається із блока визначення швидкості зближення із транспортним засобом, що рухається по смузі попутного руху, і блока визначення швидкості зближення із транспортним засобом, що рухається по смузі зустрічного руху (Патент 2310922 Российская Федерация МПК G08G1/16, G01S17/93 Способ предотвращения столкновений автомобиля и устройство для его осуществления [Текст] / СМ. Мужичек, В.В. Ефанов, В.И. Винокуров, В.Н. Зыков; заявитель и патентообладатель общество с ограниченной ответственностью научно-производственная компания "Двина". № 2005131659/11; заявл. 12.10.2005; опубл. 20.04.2007). Відома система запобігання зіткнення автомобілів та інших ТЗ містить пристрій для реєстрації електромагнітного випромінювання автомобілів від стандартної автомобільної охоронної сигналізації діапазону 433,92 МГц, що додатково обладнана передавачем кодового сигналу у вигляді коротких імпульсів, амплітуда і частота яких пропорційна швидкості руху автомобілів, які знаходяться на попутній і зустрічній смугах руху, перетворює його в електричні сигнали, визначає відстані до транспортних засобів і виробляє попереджувальний сигнал або команду на гальмування відносно автомобілів, які знаходяться на попутній смузі руху та здійснює висновок про можливість виконання маневру обгону відносно автомобілів, які знаходяться на смузі зустрічного руху (Патент 74349 Україна МПК G08G 1/16, G01S 17/93 Спосіб запобігання зіткненням автомобілів / А.І. Пабат, В.П. Кирєєв, О.В. Яловий; заявник і патентовласник Дніпродзержинський державний технічний університет. - № u201204280; заявл. 06.04.12; опубл. 25.10.12). Найбільш близьким до об'єкта, що заявляється, є вибране як прототип системи запобігання зіткнення автомобілів (Патент 2450365 Российская Федерация МПК G08G1/16, B60W30/08 Способ предотвращения столкновения автомобилей и устройство для его осуществления [Текст] / В.В. Кузьмин, И.А Кочетов, С.В. Псянин, А.Б. Еремин; заявитель и патентообладатель Федеральное государственное образовательное учреждение высшего профессионального образования "Военная академия ракетных войск стратегического назначения имени Петра Великого" Министерства обороны Российской Федерации. - № 2008140643/11; заявл. 13.10.2008; опубл. 20.04.2010), що містить два оптико-електронні перетворювачі, датчик прискорення, датчик поздовжнього ухилу дороги обчислювач, що складається із блока визначення швидкості зближення із транспортними засобами, блока оцінки динамічних характеристик автомобіля і блока логіки, перемикач уведення інформації про геометричні розміри транспортного засобу, що рухається в попутному напрямку, два світлових і два звукових сигналізатори, причому виходи датчиків прискорення, швидкості й поздовжнього ухилу дороги з'єднані з входом блока логіки й додатково із входом блока оцінки динамічних характеристик автомобіля, вихід якого з'єднаний із входом блока логіки, а входи звукових сигналізаторів з'єднані з виходом блока логіки. Недоліками таких систем є: відсутність елементів, які дозволяють виявити ділянки дороги з обмеженням швидкості руху або з забороненим обгоном, відсутність датчика визначення передачі, відсутність звукових та світлових сигналізаторів необхідності збільшення інтенсивності розгону при обгоні, а також сигналізаторів можливості безпечного здійснення маневру перестроювання на свою полосу, відсутність блока керування гальмуванням, відсутність у обчислювачі блоків розпізнавання дорожніх знаків, визначення геометричних параметрів ТЗ або колони з двох і більше ТЗ, визначення потужності двигуна, визначення завантаження ТЗ, визначення максимальної потужності двигуна при поточному технічному стані 1 UA 86134 U 5 10 15 20 25 30 35 40 45 50 55 та якості палива, визначення можливого прискорення та швидкості з урахуванням перемиканням передач, відсутність можливості застосування системи запобігання зіткнення на автомобілі, що рухається назустріч ТЗ, який здійснює обгін. В основу корисної моделі поставлена задача збільшення достовірності оцінювання безпеки обгону ТЗ, що рухається в попутному напрямі за рахунок врахування поточної потужності двигуна, технічного стану та завантаження автомобіля, якості пального, передачі, на якій рухається автомобіль, та можливості переключення передачі під час обгону, уклону дорожнього полотна, ділянок дороги з обмеженням швидкості та забороненим обгоном. Поставлена задача вирішується реалізацією системи у пристрої для запобігання зіткненням автомобіля, який містить два радари, два трикоординатних датчика прискорення, датчик повздовжнього уклону дороги, датчик визначення передачі, на якій рухається транспортний засіб (ТЗ), що здійснює обгін, додаткову відеокамеру, яка дає змогу розпізнавати дорожні знаки, що обмежують швидкість руху або позначають ділянки дороги на яких обгін заборонений, обчислювач, який складається із блоків визначення швидкості зближення з ТЗ і блока логіки, блока розпізнавання дорожніх знаків, блока визначення геометричних параметрів ТЗ або колони з двох та більше ТЗ, що рухаються у попутному напрямку, блока визначення потужності двигуна ТЗ, що здійснює обгін, блока визначення завантаження ТЗ, що здійснює обгін, визначення максимальної потужності двигуна при поточному технічному стані ТЗ, що здійснює обгін та якості палива, визначення можливого прискорення та швидкості з урахуванням перемикання передач, блока контролю відхилення поточного прискорення та швидкості ТЗ, що здійснює обгін, від прогнозованих значень, чотирьох звукових і світлових сигналізаторів, що інформують водія про можливість або неможливість здійснення обгону, а також з блока керування гальмуванням в разі виявлення небезпеки зіткнення при обгоні. Пристрій (фіг. 1) для запобігання зіткненням автомобіля містить два радари 1 і 2, що встановлюються попереду ТЗ, по боках, додаткову відеокамеру розпізнавання дорожніх знаків 3, два трикоординатних датчика прискорення 4 і 5, датчик повздовжнього уклону дороги 6, датчик визначення передачі 7, обчислювач 8, світлові та звукові сигналізатори заборони здійснення обгону 9, можливості здійснення обгону 10, необхідності збільшення інтенсивності розгону при обгоні 11, можливості безпечного здійснення маневру перестроювання на свою полосу 12, блок керування гальмуванням 13. Обчислювач (фіг. 2) містить блок визначення швидкості зближення з ТЗ 14, блок розпізнавання дорожніх знаків 15, блок визначення геометричних параметрів ТЗ 16, блок визначення потужності двигуна 17, блок визначення завантаження ТЗ, визначення максимальної потужності двигуна при поточному технічному стані ТЗ, та якості палива, визначення можливого прискорення та швидкості з урахуванням перемикання передач 18, блок контролю відхилення поточного прискорення та швидкості ТЗ від прогнозованих значень 19 і блок логіки 20. Блок логіки представляє собою обчислювальний пристрій, що реалізує алгоритм рішення задачі безпечного обгону ТЗ та безпечного наближення до зустрічного ТЗ, який здійснює обгін. Входи блока логіки20 з'єднані з виходами блока визначення швидкості зближення з ТЗ 14, з виходом блока розпізнавання дорожніх знаків 15, з виходом блока визначення геометричних параметрів ТЗ 16, з виходом блока визначення потужності двигуна 17, з виходами блока визначення завантаження ТЗ, визначення максимальної потужності двигуна при поточному технічному стані ТЗ, та якості палива, визначення можливого прискорення та швидкості з урахуванням перемикання передач 18, з виходом блока контролю відхилення поточного прискорення та швидкості ТЗ від прогнозованих значень 19. Виходи з блока логіки 20 з'єднані з блоком контролю відхилення поточного прискорення та швидкості ТЗ від прогнозованих значень 19, засобами світлової та звукової індикації 9-12, а також з блоком керування гальмуванням. Входи блока визначення швидкості зближення з ТЗ 14 з'єднані з виходами радарів 1, 2 та трикоординатних датчиків прискорення 4, 5, виходи з'єднані з входами блока логіки 20. Вхід блока розпізнавання дорожніх знаків 15 з'єднаний з виходом відеокамери розпізнавання дорожніх знаків 3, вихід з'єднаний з входом блока логіки 20. Входи блока визначення геометричних параметрів ТЗ 16 з'єднані з виходами радарів 1, 2, вихід з'єднаний з входом блока логіки 20. Входи блока визначення потужності двигуна 17 з'єднані з виходами трикоординатних датчиків прискорення 4, 5, з виходом блока визначення завантаження ТЗ, визначення максимальної потужності двигуна при поточному технічному стані ТЗ, та якості палива, визначення можливого прискорення та швидкості з урахуванням перемикання передач 18, вихід з'єднаний з входом блока логіки 20, та входом блока визначення завантаження ТЗ, визначення 2 UA 86134 U 5 10 15 20 25 30 35 40 45 50 55 60 максимальної потужності двигуна при поточному технічному стані ТЗ, та якості палива, визначення можливого прискорення та швидкості з урахуванням перемикання передач 18. Входи блока визначення завантаження ТЗ, визначення максимальної потужності двигуна при поточному технічному стані ТЗ та якості палива, визначення можливого прискорення та швидкості з урахуванням перемикання передач 18 з'єднані з виходами трикоординатних датчиків прискорення 4, 5 з виходом датчика повздовжнього уклону дороги 6, з виходом датчика передачі 7, з виходом блока визначення потужності двигуна 17, виходи з'єднані з входом блока визначення потужності двигуна 17, з входами блока логіки 20. Входи блока контролю відхилення поточного прискорення та швидкості ТЗ від прогнозованих значень 19 з'єднані з виходами трикоординатних датчиків прискорення 4, 5, з виходом блока логіки 20, вихід з'єднаний з входом блока логіки 20. Пристрій для запобігання зіткненням автомобіля при виконанні обгону працює наступним чином. Перед виконанням обгону визначаються швидкість та прискорення ТЗ, що здійснює обгін, за допомогою двох трикоординатних датчиків прискорення 4, 5 інформація від яких дозволяє одержувати параметри швидкості ТЗ у блоці визначення швидкості зближення з ТЗ 14 шляхом математичної обробки без застосування додаткового датчика швидкості. Також у блок визначення швидкості зближення з ТЗ 14 поступає інформація від радарів 1, 2, на підставі якої визначаються швидкості ТЗ, що рухаються у попутному та зустрічному напрямах. Інформація про швидкості зближення з ТЗ, що рухаються у попутному та зустрічному напрямах з блока 14 поступає до блока логіки 20. Також за допомогою радарів 1, 2 визначаються відстані до ТЗ, що рухаються у попутному та зустрічному напрямах та геометричні параметри попутного ТЗ або колони з двох та більше ТЗ у блоці визначення геометричних параметрів ТЗ 16, інформація з якого поступає до блока логіки 20. Паралельно з цим інформація з відеокамери розпізнавання дорожніх знаків З поступає у блок розпізнавання дорожніх знаків 15, який визначає ділянки дороги з обмеженням швидкості або ділянки, де обгін заборонений, а далі у блок логіки 20. Поточна потужність двигуна ТЗ, що здійснює обгін, визначається у блоці визначення потужності двигуна 17 на підставі інформації від трикоординатних датчиків прискорення 4, 5 а також додаткової інформації, що попередньо закладена у пам'ять цього блока, та інформації про поточну завантаженість ТЗ. Результати визначення поточної потужності поступають у блок логіки 20 та у блок визначення завантаження ТЗ, визначення максимальної потужності двигуна при поточному технічному стані ТЗ та якості палива, визначення можливого прискорення та швидкості з урахуванням перемикання передач 18. До цього ж блока 18 поступає інформація від трикоординатних датчиків прискорення 4, 5, датчика повздовжнього уклону дороги 6 та датчика визначення передачі 7. У функції блока 18 входять визначення завантаження ТЗ, визначення максимальної потужності двигуна при поточному технічному стані ТЗ та якості палива, визначення можливого прискорення та швидкості з урахуванням перемикання передач. Інформація про поточне завантаження ТЗ та уклон дороги поступає із блока 18 у блок визначення поточної потужності двигуна 17 для коректної його роботи. Інформація про можливе максимальне прискорення ТЗ та про можливу максимальну швидкість при обгоні поступає з блока 18 до блока логіки 20. Під час виконання обгону функцію контролю відхилення поточного прискорення та швидкості ТЗ, що здійснює обгін, покладено на блок 19, в якому здійснюється порівняння поточних швидкості та прискорення, інформація про які поступає від трикоординатних датчиків прискорення 4, 5 з прогнозованою швидкістю та прискоренням, інформація про які надходить з блока логіки 20. Результати порівняння з блока 19 поступають у блок логіки 20. У блоці логіки 20 з урахуванням даних від блоків 14-19, таких як швидкість зближення з ТЗ, відстань до ТЗ, що рухаються у попутному та зустрічному напрямах, габарити ТЗ або колони з двох і більше ТЗ, що рухається у попутному напрямі, інформація про ділянки дороги, на яких обмежена швидкість або обгін заборонений, поточна швидкість та прискорення ТЗ, що здійснює обгін, максимально можливі швидкість та прискорення ТЗ, що здійснює обгін, з урахуванням можливості переключення передач, за заданим алгоритмом виконується розрахунок задачі обгону та оцінка його безпечності. При неможливості безпечного обгону блок логіки 20 надсилає сигнал на світловий та звуковий сигналізатор заборони здійснення обгону 9. При наявності можливості безпечного обгону блок логіки 20 надсилає сигнал на світловий та звуковий сигналізатор можливості здійснення обгону 10. Під час виконання обгону у випадку невідповідності поточних швидкості та прискорення ТЗ прогнозованим значенням блок логіки 20 надсилає сигнал на світловий та звуковий сигналізатор необхідності збільшення інтенсивності розгону при обгоні 11. На завершальній стадії обгону блок логіки 20 надсилає на звукові та світлові сигналізатори 12 сигнал можливості безпечного здійснення маневру перестроювання на свою полосу. При виявленні під час обгону неможливості безпечного його завершення блок 3 UA 86134 U 5 10 15 20 25 30 логіки 20 надсилає на світловий та звуковий сигналізатор сигнал заборони здійснення обгону 9. При виявленні небезпеки зіткнення з автомобілем, що рухається назустріч, блок логіки 20 надсилає сигнал на блок керування гальмуванням 13, який вмикає автоматичне гальмування автомобіля. Пристрій для запобігання зіткненням автомобіля при русі назустріч автомобілю, що здійснює обгін працює наступним чином. При появі на попутній смузі руху автомобіля, що здійснює обгін, визначається швидкість ТЗ, що рухається назустріч автомобілю, що здійснює обгін, за допомогою двох трикоординатних датчиків прискорення 4, 5, інформація від яких поступає у блок визначення швидкості зближення з ТЗ 14. Також у блок визначення швидкості зближення з ТЗ 14 поступає інформація від радарів 1, 2, на підставі якої визначаються швидкості та прискорення ТЗ, що здійснює обгін та ТЗ, який обганяють. Інформація про швидкості зближення з ТЗ з блока 14 поступає до блока логіки 20. Також за допомогою радарів 1, 2 визначаються відстані до ТЗ, що здійснює обгін, та до ТЗ, який обганяють, у блоці визначення геометричних параметрів ТЗ 16, інформація з якого поступає до блока логіки 20. У блоці логіки 20 з урахуванням даних від блоків 14, 16, таких як швидкість та прискорення зближення з ТЗ, відстань до ТЗ, що рухаються у зустрічному напрямі, поточна швидкість ТЗ, що рухається назустріч автомобілю, що здійснює обгін, за заданим алгоритмом виконується розрахунок задачі обгону та оцінка його безпечності. При наявності можливості безпечного завершення обгону автомобілем, що рухається назустріч, блок логіки 20 надсилає сигнал на світловий та звуковий сигналізатор можливості здійснення обгону 10. При неможливості безпечного завершення обгону автомобілем, що рухається назустріч, блок логіки 20 надсилає сигнал на світловий та звуковий сигналізатор заборони здійснення обгону 9. При виявленні небезпеки зіткнення з автомобілем, що рухається назустріч та здійснює обгін, блок логіки 20 надсилає сигнал на блок керування гальмуванням 13, який вмикає автоматичне гальмування автомобіля. Запропонована система запобігання зіткненняавтомобілів дозволяє збільшити достовірність оцінювання безпеки обгону ТЗ, що рухається в попутному напрямі, збільшити безпеку під час виконання обгону та під час руху назустріч автомобілю, що здійснює обгін. Система запобігання зіткнення автомобілів може бути використана на автомобільному транспорті у якості одного з елементів бортової системи безпеки автомобіля. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 45 50 55 Система для запобігання зіткнення автомобілів при виконанні обгону, що містить датчик поздовжнього ухилу дороги, обчислювач, що складається із блока визначення швидкості зближення з транспортним засобом (ТЗ), блока контролю відхилення поточного прискорення та швидкості ТЗ від прогнозованих значень, блока логіки, сигналізатори заборони та можливості здійснення обгону, яка відрізняється тим, що визначення швидкості зближення з ТЗ та його геометричних параметрів здійснюється двома радарами; розпізнавання дорожніх знаків, які обмежують швидкість руху на ділянці дороги або забороняють обгін здійснюється за допомогою відповідної відеокамери; визначення швидкості та прискорення здійснюється одночасно двома трикоординатними датчиками прискорення, інформація від яких дозволяє одержувати параметри швидкості ТЗ шляхом математичної обробки; передача, на якій здійснюється обгін визначається за допомогою відповідного датчика передачі, що дає можливість враховувати переключення передач під час обгону; додатково встановлено звукові та світлові сигналізатори необхідності збільшення інтенсивності розгону при обгоні, а також сигналізатори можливості безпечного здійснення маневру перестроювання на свою смугу руху; додатково застосовано блок керування гальмуванням, який виконує функції автоматичного гальмування автомобіля у разі виявлення небезпеки зіткнення; до обчислювача додатково включені блоки розпізнавання дорожніх знаків, визначення геометричних параметрів ТЗ або колони з двох і більше ТЗ, визначення потужності двигуна, визначення завантаження ТЗ, визначення максимальної потужності двигуна при поточному технічному стані та якості палива, визначення можливого прискорення та швидкості з урахуванням перемикання передач; є можливість застосування системи запобігання зіткнення на автомобілі, що рухається назустріч ТЗ, який здійснює обгін, та у разі виявлення небезпеки зіткнення - наявність попереджувальних звукових та світлових сигналів для водія або застосування примусового гальмування. 4 UA 86134 U Комп’ютерна верстка М. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G08G 1/16, B60W 30/08
Мітки: система, обгону, зіткнення, виконанні, автомобілів, маневру, запобігання
Код посилання
<a href="https://ua.patents.su/7-86134-sistema-zapobigannya-zitknennya-avtomobiliv-pri-vikonanni-manevru-obgonu.html" target="_blank" rel="follow" title="База патентів України">Система запобігання зіткнення автомобілів при виконанні маневру обгону</a>
Спосіб запобігання зіткнення автомобілів при виконанні маневру обгону
Номер патенту: 86133
Опубліковано: 10.12.2013
Автори: Подригало Михайло Абович, Тесля Володимир Олегович, Абрамов Дмитрій Володимирович
МПК: G08G 1/16, B60W 30/08
Мітки: маневру, спосіб, обгону, запобігання, виконанні, автомобілів, зіткнення
Формула / Реферат:
Спосіб запобігання зіткнення автомобілів при виконанні маневру обгону, заснований на визначенні відстані до транспортних засобів (ТЗ), що знаходяться на попутній та зустрічній полосах руху, повздовжнього ухилу дороги та прискорення автомобіля, яке може бути досягнуто при даному завантаженні та технічному стані, виходячи з чого визначають можливість безпечного обгону ТЗ, видачі світлової та звукової сигналізації заборони або можливості...
Спосіб запобігання зіткненням автомобілів
Номер патенту: 74349
Опубліковано: 25.10.2012
Автори: Яловий Олександр Васильович, Пабат Анатолій Іванович, Кирєєв Володимир Петрович
МПК: G08G 1/16, G01S 17/93
Мітки: запобігання, автомобілів, зіткненням, спосіб
Формула / Реферат:
Спосіб запобігання зіткненням автомобілів, який полягає в тому, що приймають електромагнітне випромінювання автомобілів, які знаходяться на попутній і зустрічній смугах руху, перетворюють його в електричні сигнали, визначають відстані до транспортних засобів і виробляють попереджувальний сигнал або команду на гальмування відносно автомобілів, які знаходяться на попутній смузі руху та здійснюють висновок про можливість виконання маневру...
Пристрій оцінки небезпеки зіткнення суден за курсовим кутом лінії відносного руху

Номер патенту: 40401
Опубліковано: 10.04.2009
Автори: Бень Андрій Павлович, Нгуен Тхан Шон, Мальцев Анатолій Сідорович
МПК: G08G 3/00
Мітки: зіткнення, пристрій, руху, відносного, кутом, курсовим, небезпеки, лінії, суден, оцінки
Формула / Реферат:
Пристрій оцінки небезпеки зіткнення суден за курсовим кутом лінії відносного руху, що містить датчики пеленга, дальності, курсу і швидкості, систему первинної обробки, блок визначення всіх параметрів на загальні прямокутні координати, блок перетворення полярних координат на прямокутні координати, зв'язаний з береговою радіолокаційною станцією, а також систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з...
Система для захисту робочого органа перевантажувальної машини від зіткнення з перешкодою
Номер патенту: 102881
Опубліковано: 27.08.2013
Автори: Фєдосовскій Міхаіл Євгєньєвіч, Дунаєв Вадім Ігорєвіч, Ніколаєв Вячєслав Вікторовіч, Іголкін Віталій Алєксєєвіч
МПК: G21C 19/00
Мітки: перевантажувальної, робочого, захисту, система, перешкодою, зіткнення, машини, органа
Формула / Реферат:
1. Система для захисту від зіткнення з перешкодою робочих органів перевантажувальної машини для перевантаження ядерного палива, що містить датчики (6) положення, розміщені по периферії робочих органів, яка відрізняється тим, що вона містить опорну раму (1), що має опорну поверхню і виконану з можливістю прикріплення під перевантажувальною машиною, рухомий каркас (2), що містить верхню раму (7), розміщену з опорою на опорну поверхню опорної...
Спосіб визначення швидкості транспортних засобів у момент зіткнення
Номер патенту: 66462
Опубліковано: 17.05.2004
Автор: Огородніков Віталій Антонович
МПК: G01N 19/00, G01N 33/20
Мітки: швидкості, засобів, спосіб, транспортних, зіткнення, визначення, момент
Формула / Реферат:
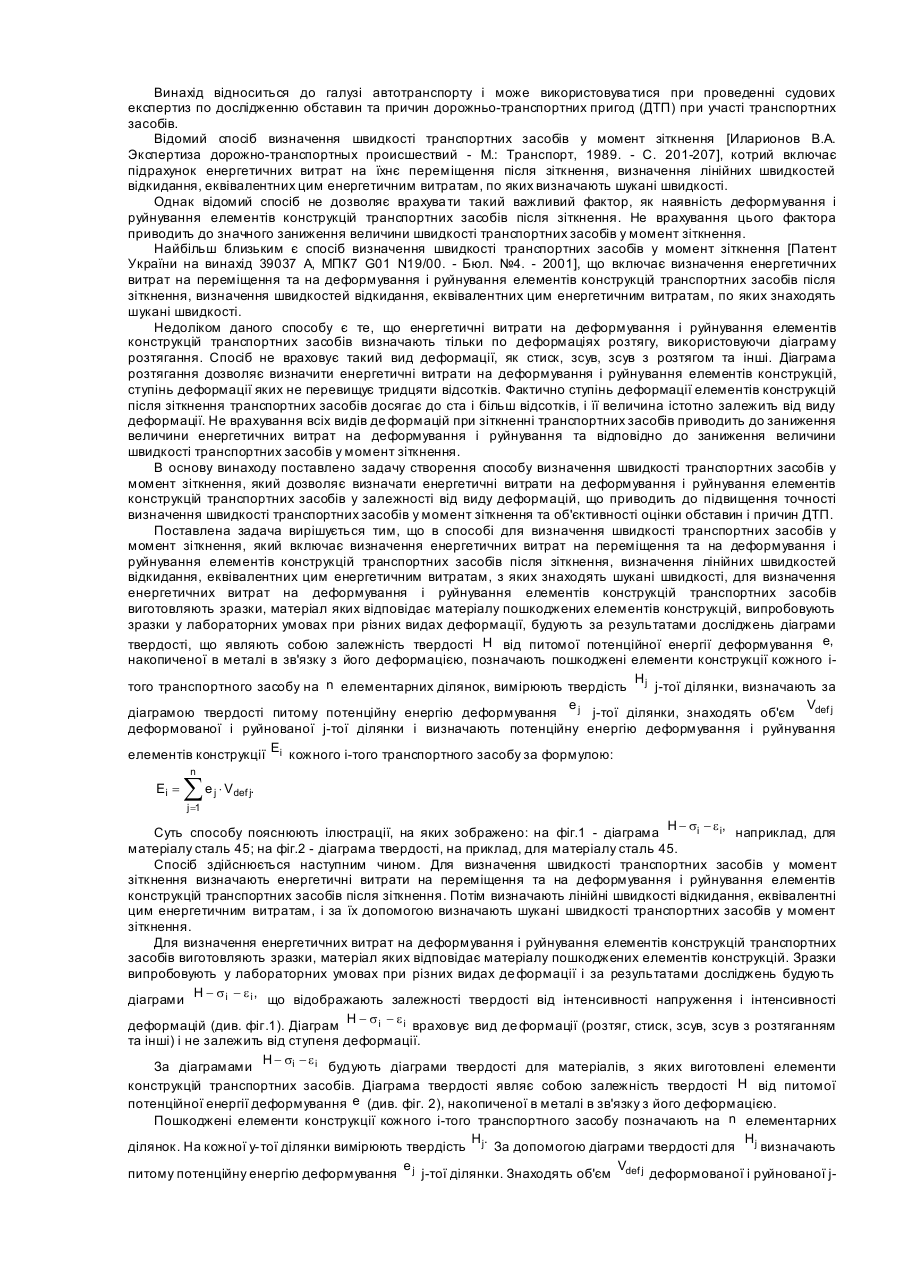
Спосіб визначення швидкості транспортних засобів у момент зіткнення, який включає визначення енергетичних витрат на переміщення та на деформування і руйнування елементів конструкцій транспортних засобів після зіткнення, визначення лінійних швидкостей відкидання, еквівалентних цим енергетичним витратам, з яких знаходять шукані швидкості, який відрізняється тим, що для визначення енергетичних витрат на деформування і руйнування елементів...
Попередній патент: Спосіб запобігання зіткнення автомобілів при виконанні маневру обгону
Наступний патент: Спосіб прогнозування розвитку часткової атрофії зорового нерва як наслідку запалення зорового нерва при увеїті
Випадковий патент: Щілиноріз