Пристрій оцінки небезпеки зіткнення суден за курсовим кутом лінії відносного руху
Номер патенту: 40401
Опубліковано: 10.04.2009
Автори: Бень Андрій Павлович, Мальцев Анатолій Сідорович, Нгуен Тхан Шон

Формула / Реферат
Пристрій оцінки небезпеки зіткнення суден за курсовим кутом лінії відносного руху, що містить датчики пеленга, дальності, курсу і швидкості, систему первинної обробки, блок визначення всіх параметрів на загальні прямокутні координати, блок перетворення полярних координат на прямокутні координати, зв'язаний з береговою радіолокаційною станцією, а також систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок графічного зображення для оцінки і вирішення задачі розходження між суднами, блок органів керування, який відрізняється тим, що система первинної обробки містить блок розрахунку курсових кутів лінії відносного руху суден на підставі інформації, яка надходить з блока визначення всіх параметрів і блока перетворення полярних координат на прямокутні координати, блок оцінки змін курсових кутів ліній відносного руху суден, який підключено до системи вторинної обробки, яка містить блок розрахункових даних з вибору безпечного маневру.
Текст
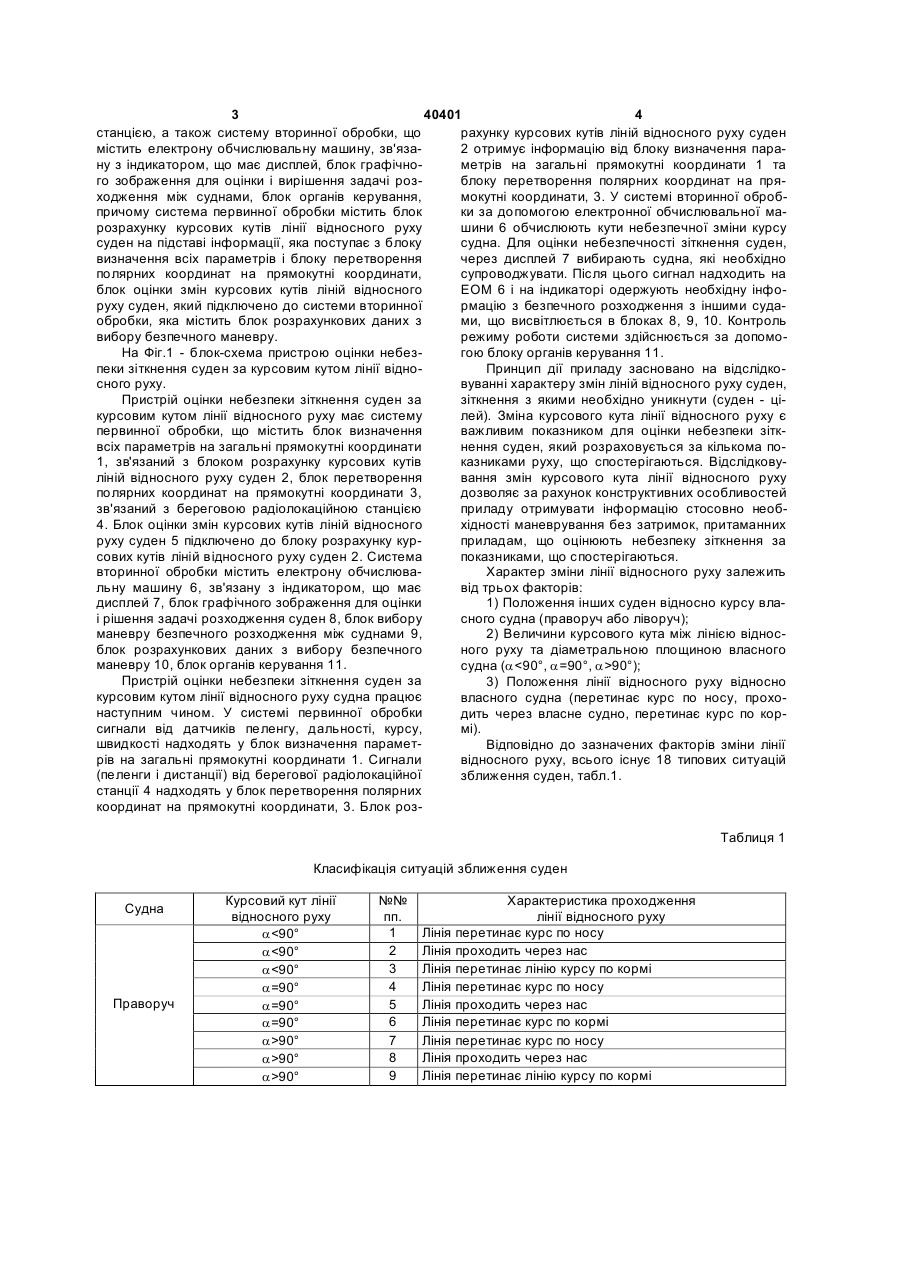
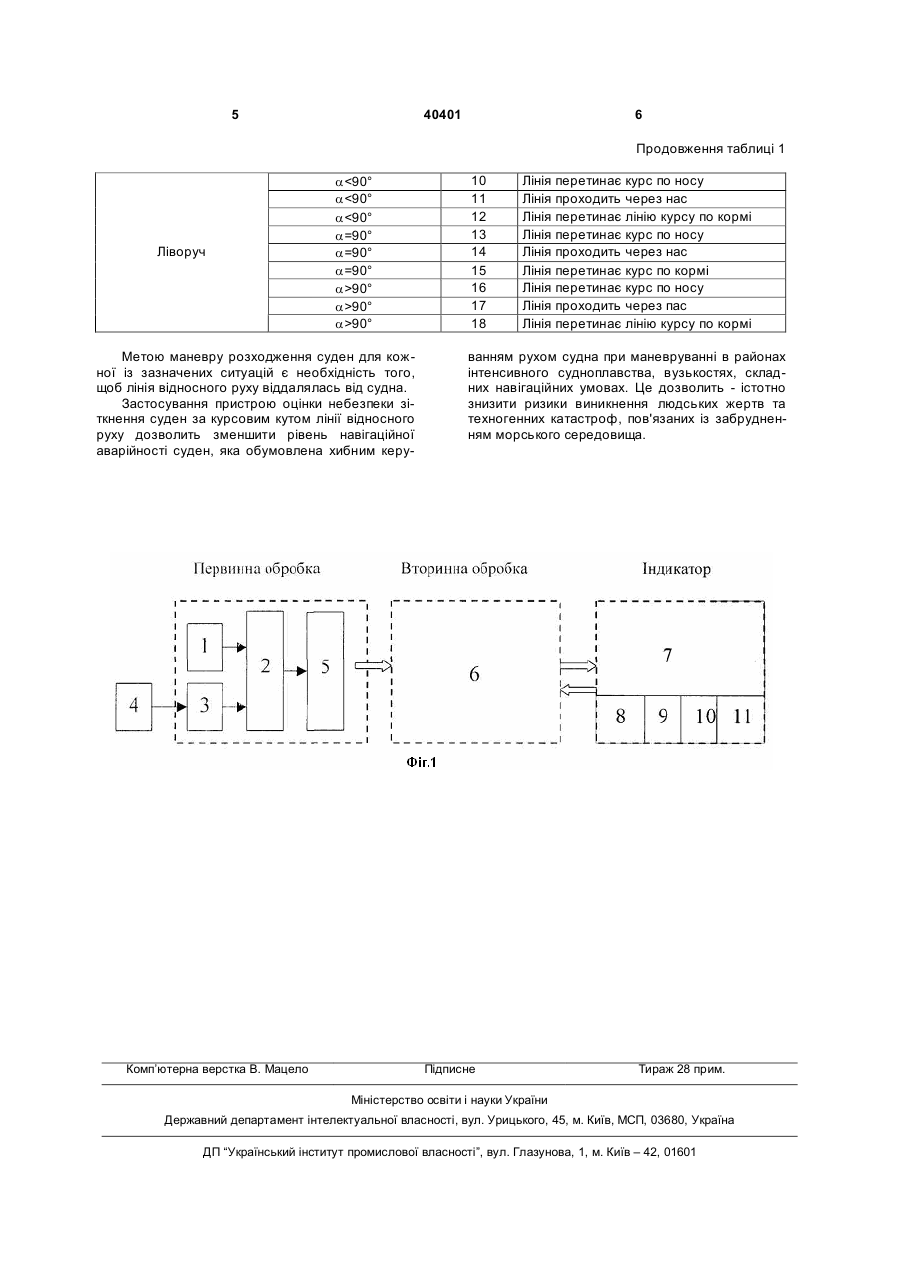
Пристрій оцінки небезпеки зіткнення суден за курсовим кутом лінії відносного руху, що містить датчики пеленга, дальності, курсу і швидкості, систему первинної обробки, блок визначення всіх параметрів на загальні прямокутні координати, блок перетворення полярних координат на прямокутні координати, зв'язаний з береговою радіолокацій 3 40401 4 станцією, а також систему вторинної обробки, що рахунку курсових кутів ліній відносного руху суден містить електрону обчислювальну машину, зв'яза2 отримує інформацію від блоку визначення парану з індикатором, що має дисплей, блок графічнометрів на загальні прямокутні координати 1 та го зображення для оцінки і вирішення задачі розблоку перетворення полярних координат на пряходження між суднами, блок органів керування, мокутні координати, 3. У системі вторинної обробпричому система первинної обробки містить блок ки за допомогою електронної обчислювальної марозрахунку курсових кутів лінії відносного руху шини 6 обчислюють кути небезпечної зміни курсу суден на підставі інформації, яка поступає з блоку судна. Для оцінки небезпечності зіткнення суден, визначення всіх параметрів і блоку перетворення через дисплей 7 вибирають судна, які необхідно полярних координат на прямокутні координати, супроводжувати. Після цього сигнал надходить на блок оцінки змін курсових кутів ліній відносного ЕОМ 6 і на індикаторі одержують необхідну інфоруху суден, який підключено до системи вторинної рмацію з безпечного розходження з іншими судаобробки, яка містить блок розрахункових даних з ми, що висвітлюється в блоках 8, 9, 10. Контроль вибору безпечного маневру. режиму роботи системи здійснюється за допомоНа Фіг.1 - блок-схема пристрою оцінки небезгою блоку органів керування 11. пеки зіткнення суден за курсовим кутом лінії відноПринцип дії приладу засновано на відслідкосного руху. вуванні характеру змін ліній відносного руху суден, Пристрій оцінки небезпеки зіткнення суден за зіткнення з якими необхідно уникнути (суден - цікурсовим кутом лінії відносного руху має систему лей). Зміна курсового кута лінії відносного руху є первинної обробки, що містить блок визначення важливим показником для оцінки небезпеки зітквсіх параметрів на загальні прямокутні координати нення суден, який розраховується за кількома по1, зв'язаний з блоком розрахунку курсових кутів казниками руху, що спостерігаються. Відслідковуліній відносного руху суден 2, блок перетворення вання змін курсового кута лінії відносного руху полярних координат на прямокутні координати 3, дозволяє за рахунок конструктивних особливостей зв'язаний з береговою радіолокаційною станцією приладу отримувати інформацію стосовно необ4. Блок оцінки змін курсових кутів ліній відносного хідності маневрування без затримок, притаманних руху суден 5 підключено до блоку розрахунку курприладам, що оцінюють небезпеку зіткнення за сових кутів ліній відносного руху суден 2. Система показниками, що спостерігаються. вторинної обробки містить електрону обчислюваХарактер зміни лінії відносного руху залежить льну машину 6, зв'язану з індикатором, що має від трьох факторів: дисплей 7, блок графічного зображення для оцінки 1) Положення інших суден відносно курсу влаі рішення задачі розходження суден 8, блок вибору сного судна (праворуч або ліворуч); маневру безпечного розходження між суднами 9, 2) Величини курсового кута між лінією відносблок розрахункових даних з вибору безпечного ного руху та діаметральною площиною власного маневру 10, блок органів керування 11. судна (a90°); Пристрій оцінки небезпеки зіткнення суден за 3) Положення лінії відносного руху відносно курсовим кутом лінії відносного руху судна працює власного судна (перетинає курс по носу, прохонаступним чином. У системі первинної обробки дить через власне судно, перетинає курс по корсигнали від датчиків пеленгу, дальності, курсу, мі). швидкості надходять у блок визначення параметВідповідно до зазначених факторів зміни лінії рів на загальні прямокутні координати 1. Сигнали відносного руху, всього існує 18 типових ситуацій (пеленги і дистанції) від берегової радіолокаційної зближення суден, табл.1. станції 4 надходять у блок перетворення полярних координат на прямокутні координати, 3. Блок розТаблиця 1 Класифікація ситуацій зближення суден Судна Праворуч Курсовий кут лінії відносного руху a90° №№ пп. 1 2 3 4 5 6 7 8 9 Характеристика проходження лінії відносного руху Лінія перетинає курс по носу Лінія проходить через нас Лінія перетинає лінію курсу по кормі Лінія перетинає курс по носу Лінія проходить через нас Лінія перетинає курс по кормі Лінія перетинає курс по носу Лінія проходить через нас Лінія перетинає лінію курсу по кормі 5 40401 6 Продовження таблиці 1 Ліворуч a90° Метою маневру розходження суден для кожної із зазначених ситуацій є необхідність того, щоб лінія відносного руху віддалялась від судна. Застосування пристрою оцінки небезпеки зіткнення суден за курсовим кутом лінії відносного руху дозволить зменшити рівень навігаційної аварійності суден, яка обумовлена хибним керу Комп’ютерна верстка В. Мацело 10 11 12 13 14 15 16 17 18 Лінія перетинає курс по носу Лінія проходить через нас Лінія перетинає лінію курсу по кормі Лінія перетинає курс по носу Лінія проходить через нас Лінія перетинає курс по кормі Лінія перетинає курс по носу Лінія проходить через пас Лінія перетинає лінію курсу по кормі ванням рухом судна при маневруванні в районах інтенсивного судноплавства, вузькостях, складних навігаційних умовах. Це дозволить - істотно знизити ризики виникнення людських жертв та техногенних катастроф, пов'язаних із забрудненням морського середовища. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for evaluation of danger of vessel collision by course angle of line of respective motion
Автори англійськоюMaltsev Anatolii Sydorovych, Ben Andrii Pavlovych, Nguien Tkhan Shon
Назва патенту російськоюУстройство оценки опасности столкновения судов по курсовому углу линии относительного движения
Автори російськоюМальцев Анатолий Сидорович, Бень Андрей Павлович, Нгуен Тхан Шон
МПК / Мітки
МПК: G08G 3/00
Мітки: кутом, суден, руху, відносного, оцінки, зіткнення, курсовим, небезпеки, лінії, пристрій
Код посилання
<a href="https://ua.patents.su/3-40401-pristrijj-ocinki-nebezpeki-zitknennya-suden-za-kursovim-kutom-lini-vidnosnogo-rukhu.html" target="_blank" rel="follow" title="База патентів України">Пристрій оцінки небезпеки зіткнення суден за курсовим кутом лінії відносного руху</a>
Пристрій для запобігання зіткненню суден
Номер патенту: 62275
Опубліковано: 15.12.2003
Автори: Мальцев Анатолій Сідорович, Май Ба Лінь
МПК: G08G 3/00
Мітки: пристрій, суден, запобігання, зіткненню
Формула / Реферат:
Пристрій для запобігання зіткненню суден, що містить блок порівняння, датчики пеленга, дальності, курсу і швидкості, який відрізняється тим, що в пристрій введена система первинної обробки, яка містить блок визначення всіх параметрів на загальні прямокутні координати, зв'язаний з автоматичною ідентифікаційною системою, блок перетворення полярних координат на прямокутні координати, зв'язаний з береговою радіолокаційною станцією, блок заданого...
Пристрій для зменшення гідродинамічного опору суден при великих швидкостях руху
Номер патенту: 46883
Опубліковано: 17.06.2002
Автори: Юрченко Андрій Валерійович, Юрченко Іван Валерійович, Юрченко Валерій Іванович
МПК: B63B 1/32
Мітки: суден, швидкостях, опору, зменшення, гідродинамічного, пристрій, руху, великих
Формула / Реферат:
Пристрій для зменшення гідродинамічного опору суден при великих швидкостях руху, що складається з циліндричних коліс, встановлених на корпусі судна, який відрізняється тим, що на колесах встановлено замкнену еластичну стрічку, яка є основним елементом контакту судна з поверхнею води, колеса виконано спрямовуючими і вибірково ведучими з амортизацією, причому ведучі колеса виконано з можливістю рухатись під дією рушія тільки після виходу судна...
Спосіб прискорення руху суден
Номер патенту: 53926
Опубліковано: 17.02.2003
Автор: Іванов Павло Никифорович
МПК: B63B 43/00, B60V 3/00
Мітки: руху, прискорення, спосіб, суден
Формула / Реферат:
Спосіб прискорення руху суден, що передбачає використання повітря, стисненого за допомогою компресорної установки, який відрізняється тим, що стиснене повітря випускають струменем крізь сопло, встановлене під дном судна.
Пристрій для попередження зіткнень повітряних суден
Номер патенту: 25757
Опубліковано: 30.10.1998
Автори: Совтус Інна Кузьмівна, Шутко Микола Олександрович, Троценко Володимир Петрович, Білецький Анатолій Якович, Семенченко Андрій Іванович, Корнійчук Май Тихонович
МПК: G06F 15/17
Мітки: повітряних, попередження, зіткнень, суден, пристрій
Формула / Реферат:
1. Пристрій для попередження зіткнень повітряних суден [1], що містить три регістри, дешифратор, три елементи АБО, два суматори, блок постійної пам'яті, n елементів І, n блоків обробки першої, другої та третьої координати, n блоків аналізу курсу, виходи яких утворюють n перших керуючих виходів пристрою, інформаційні входи першого, другого й третього регістрів є першою, другою й третьою групами одноіменних входів пристрою відповідно, виходи...
Система регулювання руху суден
Номер патенту: 42936
Опубліковано: 15.11.2001
Автори: Кравченко Олександр Іванович, Пілюгін Сергій Вікторович, Садовий Ігор Леонідович
МПК: G06F 15/163, G01S 13/91, G08G 3/00
Мітки: система, регулювання, руху, суден
Формула / Реферат:
1. Система регулювання руху суден, яка включає хоча б одну радіолокаційну станцію, що через пристрій для перетворення аналогового сигналу в цифровий код у вигляді процесорного блока комп'ютера з'єднана з пристроєм для візуалізації навігаційної обстановки у вигляді обладнаного монітором персонального комп'ютера, яка відрізняється тим, що до пристрою візуалізації навігаційної обстановки у вигляді обладнаного монітором персонального комп'ютера...
Попередній патент: Поворотний редуктор очисного комбайна
Наступний патент: Навантажувальний орган гірничої машини
Випадковий патент: Система управління запитами для доступу до ресурсів мережі інтернет