Спосіб запобігання зіткнення автомобілів при виконанні маневру обгону
Номер патенту: 86133
Опубліковано: 10.12.2013
Автори: Подригало Михайло Абович, Абрамов Дмитрій Володимирович, Тесля Володимир Олегович

Формула / Реферат
Спосіб запобігання зіткнення автомобілів при виконанні маневру обгону, заснований на визначенні відстані до транспортних засобів (ТЗ), що знаходяться на попутній та зустрічній полосах руху, повздовжнього ухилу дороги та прискорення автомобіля, яке може бути досягнуто при даному завантаженні та технічному стані, виходячи з чого визначають можливість безпечного обгону ТЗ, видачі світлової та звукової сигналізації заборони або можливості здійснення обгону, та контролю під час обгону відхилення реальної швидкості та прискорення автомобіля від попередньо прогнозованих значень, який відрізняється тим, що враховується значення швидкості зближення з ТЗ, що рухається в попутному напрямі, та його геометричні параметри; значення поточної та максимально можливої потужності двигуна автомобіля при наявному технічному стані та якості палива; інтенсивність наростання прискорення ТЗ, що здійснює обгін; можливість переключення передачі під час виконання обгону; можливість обгону одразу двох і більше ТЗ; є наявність інформування водія про заборону виконання маневру обгону на ділянках шляху, де обгін заборонений; про можливість безпечного здійснення маневру перестроювання на свою полосу руху наприкінці обгону; є наявність примусового гальмування у разі виникнення безпосередньої небезпеки зіткнення при обгоні; є можливість застосування системи запобігання зіткнення на автомобілі, що рухається назустріч ТЗ, який здійснює обгін, та у разі виявлення небезпеки зіткнення - подача попереджувальних звукових та світлових сигналів для водія або застосування примусового гальмування.
Текст
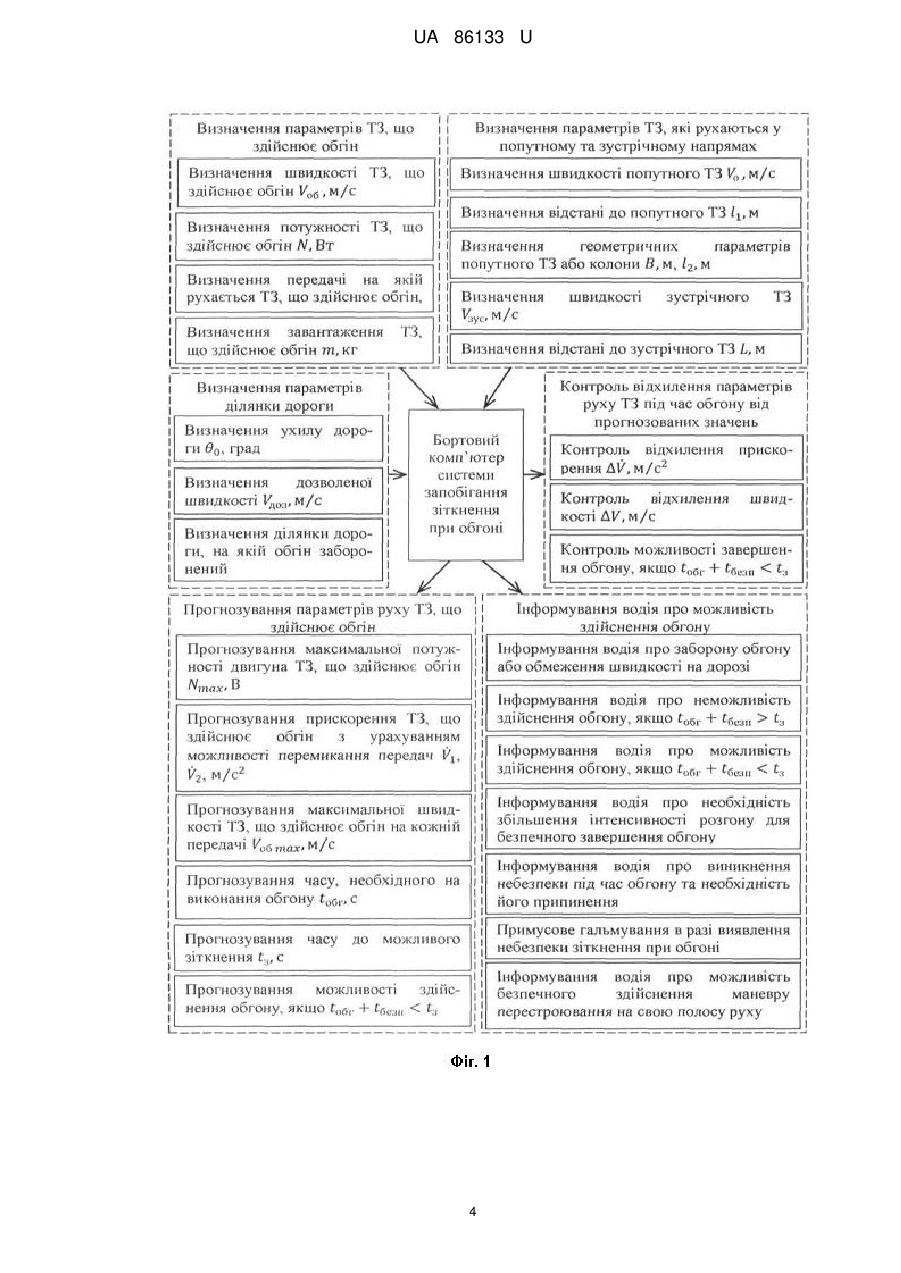
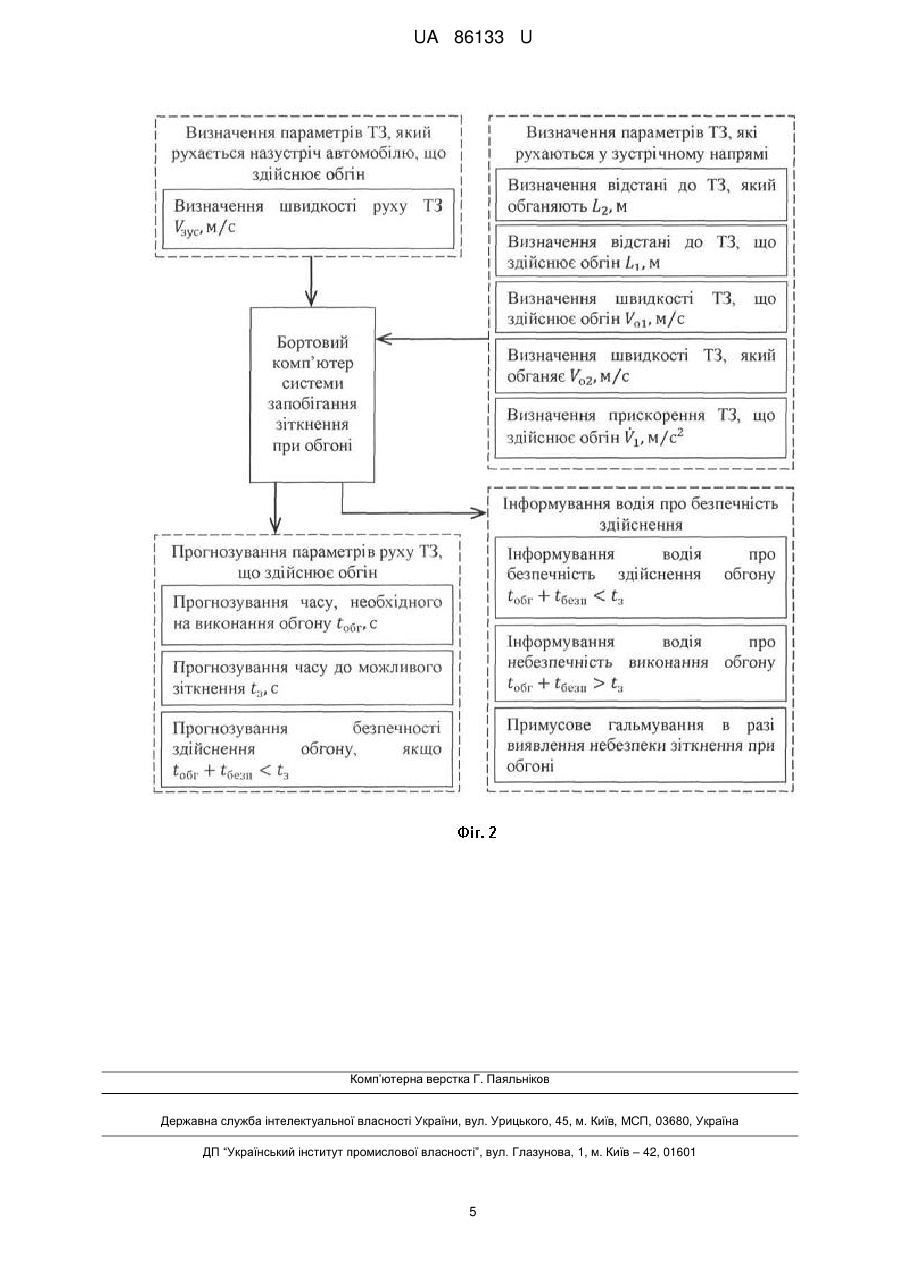
Реферат: Спосіб запобігання зіткнення автомобілів при виконанні маневру обгону, заснований на визначенні відстані до транспортних засобів (ТЗ), що знаходяться на попутній та зустрічній полосах руху, повздовжнього ухилу дороги та прискорення автомобіля, яке може бути досягнуто при даному завантаженні та технічному стані, виходячи з чого визначають можливість безпечного обгону ТЗ, видачі світлової та звукової сигналізації заборони або можливості здійснення обгону, та контролю під час обгону відхилення реальної швидкості та прискорення автомобіля від попередньо прогнозованих значень. Враховується значення поточної та максимально можливої потужності двигуна автомобіля при наявному технічному стані та якості палива; враховується можливість переключення передачі під час виконання обгону; є наявність інформування водія про заборону виконання маневру обгону на ділянках шляху, де обгін заборонений; є наявність примусового гальмування, є можливість застосування системи запобігання зіткнення на автомобілі, що рухається назустріч ТЗ, який здійснює обгін. UA 86133 U (12) UA 86133 U UA 86133 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до способів запобігання зіткнення автомобілів та інших транспортних засобів (ТЗ) при виконанні маневру обгону і може бути використана у якості одного з елементів бортової системи безпеки. Відомий спосіб запобігання зіткнення автомобілів та інших ТЗ, заснований на реєстрації електромагнітного випромінювання автомобілів від стандартної автомобільної охоронної сигналізації діапазону 433,92 МГц, що додатково обладнана передавачем кодового сигналу у вигляді коротких імпульсів, амплітуда і частота яких пропорційна швидкості руху автомобілів, що знаходяться на попутній і зустрічній смугах руху, перетворюють його в електричні сигнали, визначають відстані до транспортних засобів і виробляють попереджувальний сигнал або команду на гальмування відносно автомобілів, які знаходяться на попутній смузі руху, та здійснюють висновок про можливість виконання маневру обгону відносно автомобілів, які знаходяться на смузі зустрічного руху [Патент 74349 Україна МПК G08G 1/16, G01S 17/93 Спосіб запобігання зіткненням автомобілів / А.І. Пабат, В.П. Кирєєв, О.В. Яловий; заявник і патентовласник Дніпродзержинський державний технічний університет. - № u 2012 04280; заявл. 06.04.12; опубл. 25.10.12]. Також відомий спосіб, заснований на реєстрації оптичного випромінювання від автомобілів, що перебувають на попутній і зустрічній смугах руху, і перетворенні їх в електричні сигнали. Далі визначають відстані до транспортних засобів, що перебувають на попутній і зустрічній смугах руху, швидкість зближення до них і геометричні розміри транспортного засобу в напрямку руху. На основі даної інформації забезпечують дотримання безпечної дистанції руху щодо транспортного засобу, що перебуває на попутній смузі руху, і ухвалюють рішення щодо можливості здійснення його обгону [Патент 2310922 Российская Федерация МПК G08G1/16, G01S 17/93 Способ предотвращения столкновений автомобиля и устройство для его осуществления [Текст] / С.М. Мужичек, В.В. Ефанов, В.И. Винокуров, В.Н. Зыков; заявитель и патентообладатель общество с ограниченной ответственностью научно-производственная компания "Двина". - № 2005131659/11; заявл. 12.10.2005; опубл. 20.04.2007]. Найбільш близьким до об'єкту, що заявляється, є вибраний як прототип спосіб запобігання зіткнення автомобілів [Патент 2450365 Российская Федерация МПК G08G1/16, В60W3 0/08 Способ предотвращения столкновения автомобилей и устройство для его осуществления [Текст] / В.В. Кузьмин, И.А Кочетов, С.В. Псянин, А.Б. Еремин; заявитель и патентообладатель Федеральное государственное образовательное учреждение высшего профессионального образования "Военная академия ракетных войск стратегического назначения имени Петра Великого" Министерства обороны Российской Федерации. - № 2008140643/11; заявл. 13.10.2008; опубл. 20.04.2010], заснований на реєстрації оптичного випромінювання від ТЗ, що знаходяться на попутній та зустрічній полосах руху, перетворенні його в електричні сигнали, визначенні відстані до ТЗ, що знаходяться на попутній та зустрічній полосах руху, визначенні швидкості зближення з ними, визначенні геометричних розмірів ТЗ, що рухається в попутному напрямку. На основі даної інформації забезпечують видачу світлової сигналізації про дотримання безпечної дистанції до ТЗ, що рухається попереду та про можливість виконання маневру обгону в умовах находження ТЗ на смузі зустрічного руху. Крім того, визначають прискорення автомобіля, яке може бути досягнуто при даному завантаженні та технічному стані, та повздовжній уклін дороги, виходячи з чого визначають можливість безпечного обгону ТЗ, що рухається по переду, до початку його проведення з урахуванням шляху, що проходить цей ТЗ за час обгону. Під час обгону контролюють відповідність поточних значень прискорення, швидкості автомобіля, що обганяє, і відстані до зустрічного ТЗ розрахунковим значенням і видають світловий і звуковий сигнал на заборону обгону по полосі зустрічного руху у випадку загрози їх зіткнення, а також про небезпечну дистанцію з урахуванням ухилу дороги до ТЗ, що їде попереду. Недоліками таких способів є відсутність врахування значення поточної потужності двигуна автомобіля та максимальної можливої потужності двигуна при поточному технічному стані та якості палива; відсутність врахування інтенсивності наростання прискорення ТЗ, що здійснює обгін; відсутність врахування можливого переключення передач під час виконання обгону; відсутність врахування можливості обгону одразу двох і більше транспортних засобів; відсутність інформування водія про заборону виконання маневру обгону на ділянках шляху, де обгін заборонений; відсутність інформування водія про можливість безпечного здійснення маневру перестроювання на свою полосу руху наприкінці обгону; відсутність примусового пригальмовування у разі виникнення безпосередньої небезпеки зіткнення при обгоні; відсутність можливості застосування системи запобігання зіткнення на автомобілі, що рухається назустріч ТЗ, який здійснює обгін, та у разі виявлення небезпеки зіткнення відсутність попереджувальних звукових та світлових сигналів для водія або застосування примусового пригальмовування. 1 UA 86133 U 5 10 15 20 25 30 35 40 45 50 55 Рішення про здійснення обгону необхідно приймати до його початку без повного виходу на зустрічну полосу та набору швидкості з урахуванням наявності ділянок шляху, де обгін заборонено, з урахуванням відстані до зустрічного автомобіля та його швидкості, а також швидкості, габаритів та кількості ТЗ, що рухаються в попутному напрямі, ухилу дороги, запасу потужності двигуна автомобіля, що здійснює обгін, його завантаження, технічного стану та якості пального, можливості переключення передач під час обгону, з урахуванням можливої зміни швидкості ТЗ, що рухаються у попутному та зустрічному напрямках. Рішення про здійснення обгону приймається за результатами порівняння прогнозованого часу на обгін з часом зіткнення із зустрічним ТЗ. Під час виконання обгону необхідно контролювати відхилення реальної швидкості та прискорення автомобіля, що здійснює обгін, від прогнозованих значень та при необхідності інформувати водія світловим та (або) звуковим сигналами про небезпеку зіткнення, а в окремих випадках застосовувати примусове гальмування. Під час руху ТЗ назустріч автомобілю, що здійснює обгін, необхідно визначити, чи встигає цей автомобіль завершити обгін до зіткнення з ТЗ з урахуванням усіх факторів, які зазначено вище. При виявленні небезпеки зіткнення необхідно інформувати водія світловим та (або) звуковим сигналами про небезпеку зіткнення, а в окремих випадках застосовувати примусове гальмування. В основу корисної моделі поставлена задача збільшення достовірності оцінювання безпеки обгону ТЗ, що рухається в попутному напрямі за рахунок врахування поточної потужності двигуна, технічного стану та завантаження автомобіля, якості пального, передачі, на якій рухається автомобіль, та можливості переключення передачі під час обгону, ухилу дорожнього полотна, ділянок дороги з обмеженням швидкості та забороненим обгоном. Поставлена задача (фіг. 1) вирішується шляхом визначення відстані до ТЗ, що знаходяться на попутній та зустрічній полосах руху, їх швидкості на основі інформації, що отримується від відповідних радарів, визначення геометричних параметрів одного ТЗ або колони із декількох ТЗ, що рухаються в попутному напрямі, визначення поточної потужності двигуна автомобіля і його швидкості на підставі інформації з трикоординатних датчиків прискорення, визначення передачі, на якій рухається автомобіль, за інформацією відповідного датчика, визначення поздовжнього ухилу дороги за інформацією датчика ухилу (інклінометру), визначення максимально можливої потужності двигуна при даному технічному стані та якості палива, визначення поточного завантаження автомобіля і подальшого врахування цих параметрів при визначенні часу, необхідного на виконання обгону та часу до можливого зіткнення. Рішення на здійснення обгону ґрунтується на порівнянні цих двох часових параметрів, про результат якого сповіщається водій звуковим та (або) світловим сигналами з урахуванням інформації від додаткової камери, яка дає змогу розпізнавати дорожні знаки, що обмежують швидкість руху, або позначають ділянки дороги, на яких обгін заборонений. Під час виконання обгону за допомогою трикоординатних датчиків прискорення контролюється відхилення реальної швидкості та прискорення автомобіля, що здійснює обгін, від попередньо прогнозованих значень з урахуванням можливості переключення на понижену передачу. При виявленні відставання від прогнозованого графіку обгону водію звуковим та (або) світловим сигналами рекомендується збільшити інтенсивність розгону, у тому числі за рахунок переключення на більш низьку передачу. При виявленні небезпеки зіткнення в процесі обгону здійснюється інформування водія світловим та (або) звуковим сигналами про небезпеку, а в окремих випадках застосовується примусове гальмування. Наприкінці обгону на підставі інформації від радарів та з урахуванням безпечної відстані до ТЗ, що рухається в попутному напрямі, здійснюється інформування водія звуковим та (або) світловим сигналами про можливість безпечного здійснення маневру перестроювання на свою полосу руху. Під час руху ТЗ назустріч автомобілю, що здійснює обгін (фіг. 2) визначається відстань до ТЗ, що рухаються у зустрічному напрямі, їх швидкості, прискорення та геометричні параметри ТЗ або колони із декількох ТЗ на основі інформації, що отримується від відповідних радарів, визначається поточна швидкість автомобіля, що рухається назустріч автомобілю, який здійснює обгін, на підставі інформації з трикоординатних датчиків прискорення. З урахуванням зазначених вище факторів визначається, чи встигне зустрічний автомобіль завершити обгін до зіткнення з ТЗ, який рухається йому назустріч. При виявленні небезпеки зіткнення здійснюється інформування водія світловим та (або) звуковим сигналами про небезпеку, а в окремих випадках застосовується примусове гальмування. Запропонований спосіб запобігання зіткнення автомобілів дозволяє збільшити достовірність оцінювання безпеки обгону ТЗ, що рухається в попутному напрямі, збільшити безпеку під час виконання обгону та під час руху назустріч автомобілю, що здійснює обгін. Спосіб запобігання 2 UA 86133 U зіткнення автомобілів може бути покладений в основу роботи бортової системи безпеки автомобіля та знайти широке застосування в автомобілебудівній галузі. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 20 Спосіб запобігання зіткнення автомобілів при виконанні маневру обгону, заснований на визначенні відстані до транспортних засобів (ТЗ), що знаходяться на попутній та зустрічній полосах руху, повздовжнього ухилу дороги та прискорення автомобіля, яке може бути досягнуто при даному завантаженні та технічному стані, виходячи з чого визначають можливість безпечного обгону ТЗ, видачі світлової та звукової сигналізації заборони або можливості здійснення обгону, та контролю під час обгону відхилення реальної швидкості та прискорення автомобіля від попередньо прогнозованих значень, який відрізняється тим, що враховується значення швидкості зближення з ТЗ, що рухається в попутному напрямі, та його геометричні параметри; значення поточної та максимально можливої потужності двигуна автомобіля при наявному технічному стані та якості палива; інтенсивність наростання прискорення ТЗ, що здійснює обгін; можливість переключення передачі під час виконання обгону; можливість обгону одразу двох і більше ТЗ; є наявність інформування водія про заборону виконання маневру обгону на ділянках шляху, де обгін заборонений; про можливість безпечного здійснення маневру перестроювання на свою полосу руху наприкінці обгону; є наявність примусового гальмування у разі виникнення безпосередньої небезпеки зіткнення при обгоні; є можливість застосування системи запобігання зіткнення на автомобілі, що рухається назустріч ТЗ, який здійснює обгін, та у разі виявлення небезпеки зіткнення - подача попереджувальних звукових та світлових сигналів для водія або застосування примусового гальмування. 3 UA 86133 U 4 UA 86133 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюPodryhalo Mykhailo Abovych, Abramov Dmytro Volodymyrovych, Teslia Volodymyr Olehovych
Автори російськоюПодригало Михайло Абович, Абрамов Дмитрий Владимирович, Тесля Владимир Олегович
МПК / Мітки
МПК: G08G 1/16, B60W 30/08
Мітки: виконанні, автомобілів, обгону, зіткнення, маневру, запобігання, спосіб
Код посилання
<a href="https://ua.patents.su/7-86133-sposib-zapobigannya-zitknennya-avtomobiliv-pri-vikonanni-manevru-obgonu.html" target="_blank" rel="follow" title="База патентів України">Спосіб запобігання зіткнення автомобілів при виконанні маневру обгону</a>
Спосіб запобігання зіткненням автомобілів
Номер патенту: 74349
Опубліковано: 25.10.2012
Автори: Яловий Олександр Васильович, Кирєєв Володимир Петрович, Пабат Анатолій Іванович
МПК: G01S 17/93, G08G 1/16
Мітки: автомобілів, запобігання, зіткненням, спосіб
Формула / Реферат:
Спосіб запобігання зіткненням автомобілів, який полягає в тому, що приймають електромагнітне випромінювання автомобілів, які знаходяться на попутній і зустрічній смугах руху, перетворюють його в електричні сигнали, визначають відстані до транспортних засобів і виробляють попереджувальний сигнал або команду на гальмування відносно автомобілів, які знаходяться на попутній смузі руху та здійснюють висновок про можливість виконання маневру...
Пристрій оцінки небезпеки зіткнення суден за курсовим кутом лінії відносного руху

Номер патенту: 40401
Опубліковано: 10.04.2009
Автори: Мальцев Анатолій Сідорович, Нгуен Тхан Шон, Бень Андрій Павлович
МПК: G08G 3/00
Мітки: оцінки, суден, відносного, руху, курсовим, небезпеки, лінії, зіткнення, пристрій, кутом
Формула / Реферат:
Пристрій оцінки небезпеки зіткнення суден за курсовим кутом лінії відносного руху, що містить датчики пеленга, дальності, курсу і швидкості, систему первинної обробки, блок визначення всіх параметрів на загальні прямокутні координати, блок перетворення полярних координат на прямокутні координати, зв'язаний з береговою радіолокаційною станцією, а також систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з...
Спосіб визначення швидкості транспортних засобів у момент зіткнення
Номер патенту: 66462
Опубліковано: 17.05.2004
Автор: Огородніков Віталій Антонович
МПК: G01N 19/00, G01N 33/20
Мітки: момент, зіткнення, транспортних, швидкості, визначення, засобів, спосіб
Формула / Реферат:
Спосіб визначення швидкості транспортних засобів у момент зіткнення, який включає визначення енергетичних витрат на переміщення та на деформування і руйнування елементів конструкцій транспортних засобів після зіткнення, визначення лінійних швидкостей відкидання, еквівалентних цим енергетичним витратам, з яких знаходять шукані швидкості, який відрізняється тим, що для визначення енергетичних витрат на деформування і руйнування елементів...
Пристрій для запобігання зіткненню суден
Номер патенту: 62275
Опубліковано: 15.12.2003
Автори: Май Ба Лінь, Мальцев Анатолій Сідорович
МПК: G08G 3/00
Мітки: запобігання, зіткненню, пристрій, суден
Формула / Реферат:
Пристрій для запобігання зіткненню суден, що містить блок порівняння, датчики пеленга, дальності, курсу і швидкості, який відрізняється тим, що в пристрій введена система первинної обробки, яка містить блок визначення всіх параметрів на загальні прямокутні координати, зв'язаний з автоматичною ідентифікаційною системою, блок перетворення полярних координат на прямокутні координати, зв'язаний з береговою радіолокаційною станцією, блок заданого...
Спосіб раннього попередження зіткнення літального апарата з землею
Номер патенту: 85604
Опубліковано: 10.02.2009
Автори: Алмазов Леонід Олександрович, Іванова Катерина Геннадіївна, Білецький Олександр Кіндратович, Дроздов Олександр Олексійович
МПК: G08G 5/00
Мітки: спосіб, зіткнення, землею, апарата, попередження, літального, раннього
Формула / Реферат:
1. Спосіб раннього попередження зіткнення літального апарата з землею, який полягає в тому, що визначають місцеположення і динамічні параметри літального апарата за допомогою навігаційної системи і бортового обладнання, виконують обчислення параметрів поточного динамічного стану літального апарата, здійснюють оцінку його координат, обчислюють прогнозовану траєкторію, формують тривимірне зображення і профільну проекцію рельєфу, візуалізують...
Попередній патент: Фармацевтична композиція для лікування ендо- і ектопаразитозів
Наступний патент: Система запобігання зіткнення автомобілів при виконанні маневру обгону
Випадковий патент: Спосіб центрування двох профільних заготовок, зокрема, двох рейок, в машині для контактного стикового зварювання