Синфазна система шумозаглушення
Номер патенту: 87510
Опубліковано: 27.07.2009
Автори: Шевченко Анатолій Іванович, Полівцев Сергій Олександрович
Формула / Реферат
1. Синфазна система шумозаглушення, що містить перший і другий мікрофони, відповідно перший і другий підсилювачі, перший і другий аналого-цифрові перетворювачі, яка відрізняється тим, що у неї введені третій і четвертий мікрофони, відповідно третій і четвертий підсилювачі, третій і четвертий аналого-цифрові перетворювачі, процесорний блок, який містить перший і другий крос-кореляційні фільтри, детектор активності голосу, що включає перший і другий низькочастотні фільтри і визначник наявності або відсутності голосу, генератор рожевого шуму, комутатор сигналів, перший і другий цифро-аналогові перетворювачі, причому послідовно з'єднані відповідно перший і другий мікрофони, перший і другий підсилювачі, перший і другий аналого-цифрові перетворювачі утворюють перший вхідний кластер мікрофонів, а послідовно з'єднані відповідно третій і четвертий мікрофони, третій і четвертий підсилювачі, третій і четвертий аналого-цифрові перетворювачі утворюють відповідно другий вхідний кластер мікрофонів, у кожному з яких перший і другий, третій і четвертий мікрофони розташовані парами на відстані d1 один від одного, причому відстань між вхідними кластерами d2 більше за відстань d1, а виходи першого і другого, третього і четвертого аналого-цифрових перетворювачів є відповідно першими і другими виходами першого і другого вхідних кластерів мікрофонів і з'єднані з першими і другими входами процесорного блока, які є також входами першого і другого крос-кореляційних фільтрів, виходи яких з'єднані з першим і другим входами детектора активності голосу, які є входами низькочастотних фільтрів, виходи яких з'єднані з першим і другим входами визначника наявності або відсутності голосу, вихід якого є виходом детектора активності голосу і з'єднаний з керуючим входом комутатора сигналів, перший, другий і третій входи якого з'єднані відповідно з виходами першого і другого крос-кореляційних фільтрів і з виходом генератора рожевого шуму, а перший і другий виходи комутатора сигналів з'єднані відповідно з входами першого і другого цифро-аналогових перетворювачів, виходи яких є виходами процесорного блока й одночасно виходами синфазної системи шумозаглушення.
2. Система за п. 1, яка відрізняється тим, що визначник наявності або відсутності голосу виконаний зі змінним часовим вікном детектування сигналів, при цьому час детектування для визначення наявності голосу і час детектування для визначення відсутності голосу різний і задається процесорному блоку поза рамками системи.
3. Система за пп. 1, 2, яка відрізняється тим, що усі компоненти процесорного блока розміщені на одній мікросхемі.
Текст
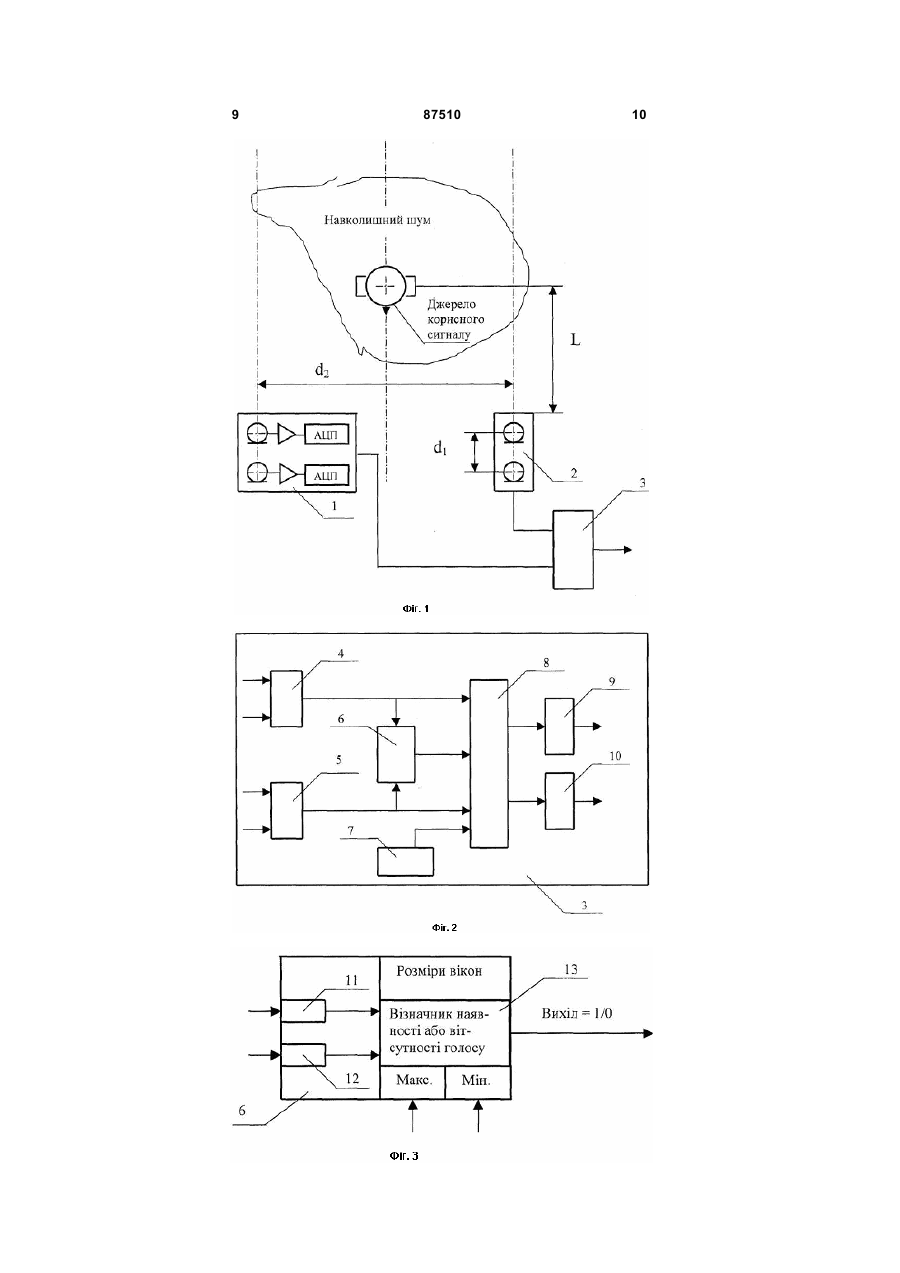
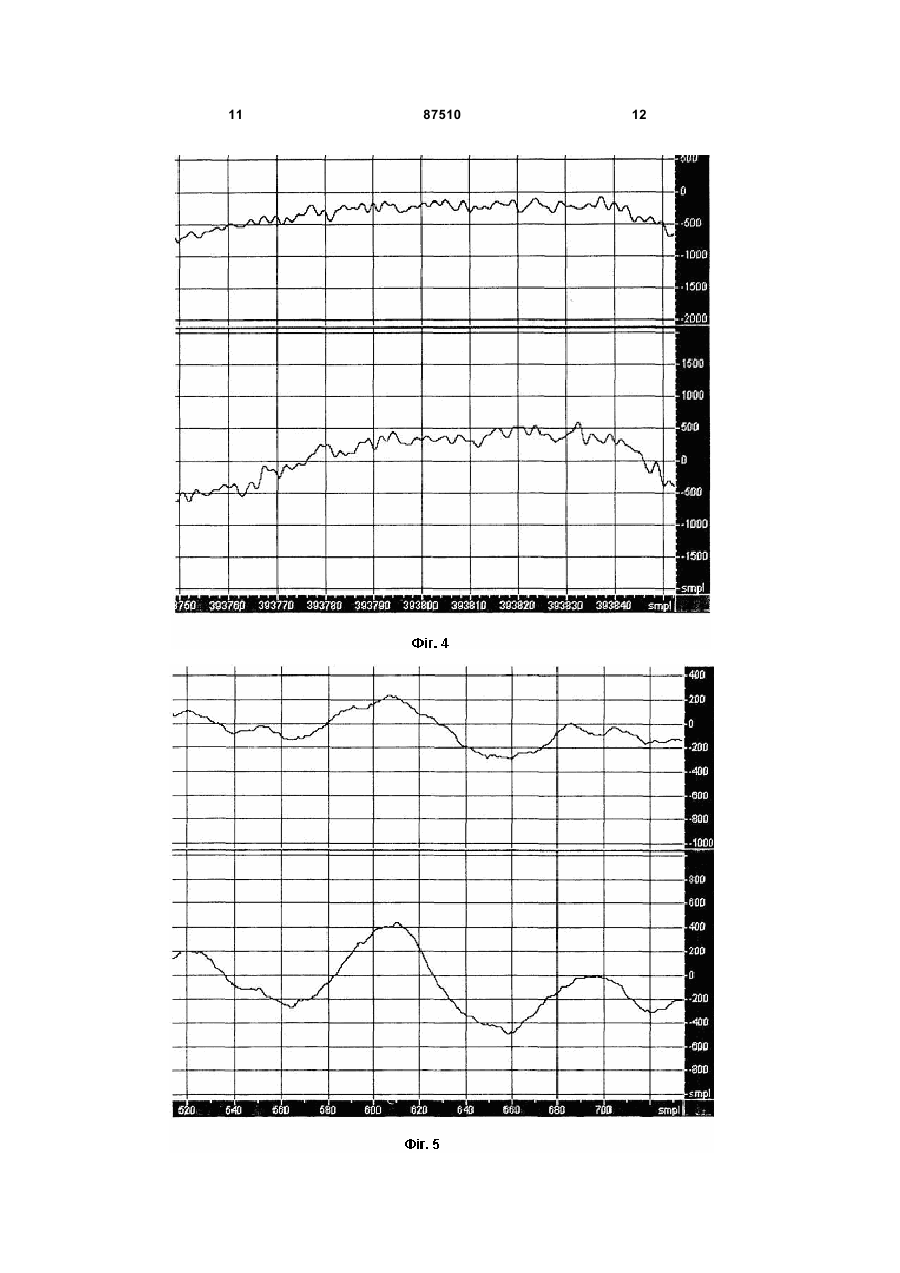
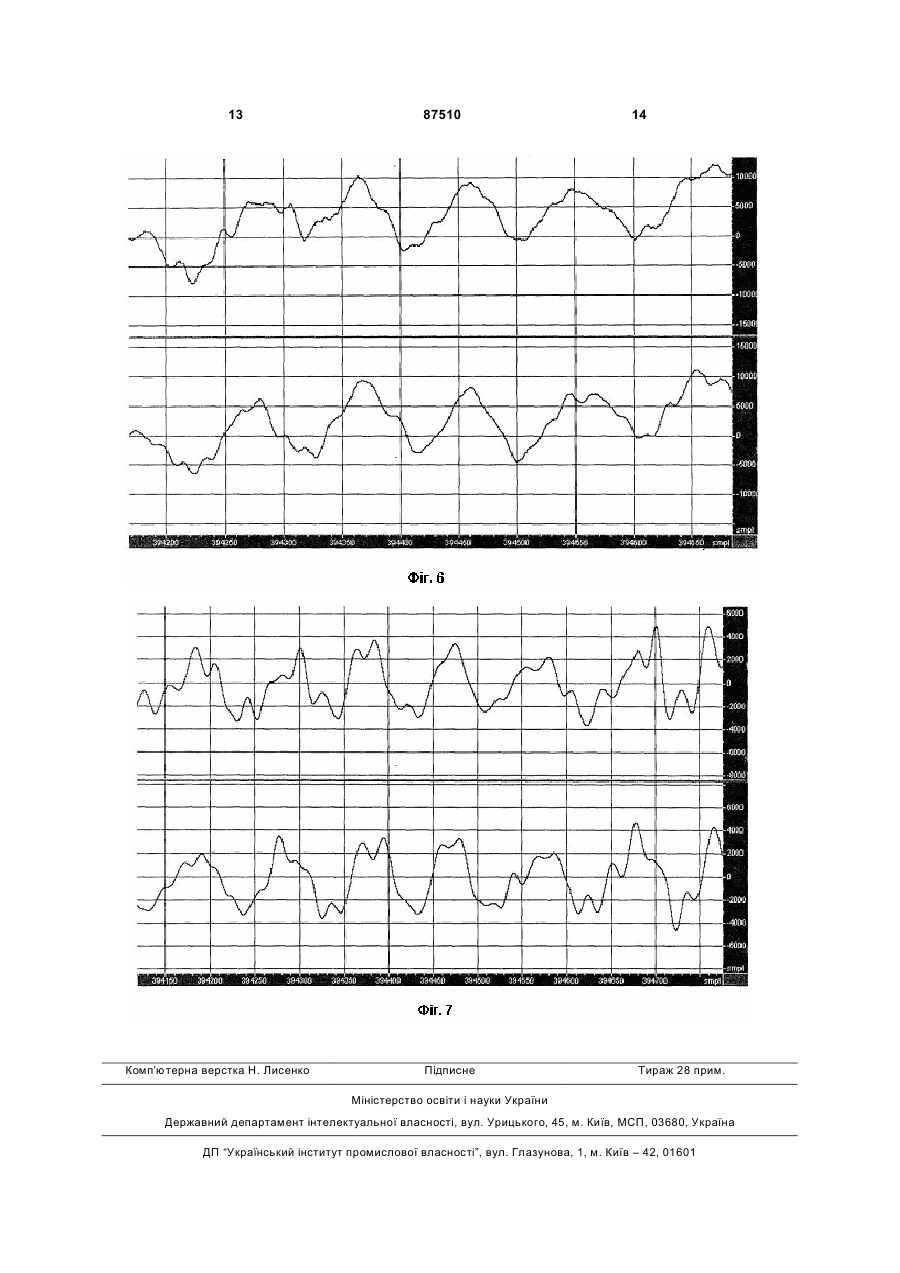
1. Синфазна система шумозаглушення, що містить перший і другий мікрофони, відповідно перший і другий підсилювачі, перший і другий аналого-цифрові перетворювачі, яка відрізняється тим, що у неї введені третій і четвертий мікрофони, відповідно третій і четвертий підсилювачі, третій і четвертий аналого-цифрові перетворювачі, процесорний блок, який містить перший і другий крос-кореляційні фільтри, детектор активності голосу, що включає перший і другий низькочастотні фільтри і визначник наявності або відсутності голосу, генератор рожевого шуму, комутатор сигналів, перший і другий цифро-аналогові перетворювачі, причому послідовно з'єднані відповідно перший і другий мікрофони, перший і другий підсилювачі, перший і другий аналого-цифрові перетворювачі утворюють перший вхідний кластер мікрофонів, а послідовно з'єднані відповідно третій і четвертий мікрофони, третій і четвертий підсилювачі, третій і четвертий аналого-цифрові перетворювачі утворюють відповідно другий вхідний клас C2 2 UA 1 3 - підвищенням чутливості власне мікрофона або безлічі мікрофонів, що утворюють направлений мікрофон (див., наприклад, систему мікрофонів як адаптивну безліч АТ895 (Adaptive - array Microphone Systems. Audio - Technica U.S. Inc., 1221 Commerce Drive, Stow, Ohio 44224 330/6862600, www.audio - technica.com); - заглушенням шумів електроніки (див., наприклад, патент США №582898, МПК H04R3/00, публ.20.11.1998р.); - заглушенням шумів звукового діапазону, які з'являються на виході мікрофона, але не є корисним сигналом. У зазначених системах шумозаглушення використовують цифрові сигнальні процесори, які перетворюють вхідний аналоговий сигнал у цифровий, який потім переводять з часового представлення в частотне, аналізують частотні складові, вирізають частотні складові шуму, відновлюють сигнал з частотного представлення у часове і через цифро-аналоговий перетворювач видають на вихід аналоговий сигнал, очищений від шумів. Зазначені системи використовують далеко рознесені мікрофони, що і забезпечує одержання фазоворозділених сигналів, визначення зсуву фаз для кожного з джерел і виділення сигналу із шуму для відомого напрямку. Однак ці системи мають значні габарити, масу й енергоспоживання, що не дозволяє застосовувати їх з такими виробами, як цифрові диктофони, стільникові телефони, системи виробничого зв'язку і т.п.Крім того, вартість таких мікрофонів часто перевищує вартість виробу, до якого вони підключаються. Відомі системи шумозаглушення з відносно невисокою вартістю, які використовують звичайні процесори в поєднанні з аналоговими фільтрами або без них, у яких шум (спільний для першого сигналу із шумом і другого сигналу, який містить переважно шум) заглушується виключенням його з досліджуваного сигналу (див., наприклад, патент США №2006133621, МПК H04R3/00, публ. 22.06.2006p.). Однак у зазначеній системі шумозаглушення, заснованій на амплітудному аналізі сигналів, використовують, як правило, масив мікрофонів, розташованих близько один до одного і до джерела сигналів, щоб одержати різні за амплітудою і близькі за фазою сигнали за рахунок адаптації системи до конкретних умов застосування, а саме до слухавки, яка має фіксовані розміри і невелику відстань до джерела звуку. Найбільш близькою до системи шумозаглушення, що заявляється, за технічною сутністю і результатом, який досягається, є система шумозаглушення за патентом США №2005175192, МПК H04R3/00, публ. 11.08.2005р. Система шумозаглушення містить перший і другий мікрофони, перший і другий підсилювачі, перший і другий аналого-цифрові перетворювачі, з'єднані з виходами мікрофонів, з яких надходять сигнали, перший інвертор для перевороту виходу сигналу, який є переверненою формою одного з перших сигналів, які містять елемент сигналу і шумовий елемент, і других сигналів, які містять, принаймні, меншу амплітуду елемента сигналу і 87510 4 шумового елемента, перший і другий суматори, проміжний інвертор для перевороту проміжного сигналу. Відомій системі властиві наступні недоліки: - непрацездатність системи, яка використовує амплітудний аналіз сигналів, якщо відстань до джерела звуку більше за відстань між мікрофонами, оскільки не буде постійної різниці між амплітудами сигналів з мікрофонів. Крім того, збільшення відстані до джерела звуку буде збільшувати коефіцієнт підсилення підсилювачів, що призведе до зростання шумів від усіх компонентів системи і до нездатності системи відрізняти шуми звукових сигналів від шумів електроніки; - неможливість фільтрації системою звуків від комах, що пролітають, наприклад, комарів, мух і т.п., оскільки через малу відстань між мікрофонами та їхню високу чутливість, яка є необхідною при великій відстані до джерела звуку, система буде сприймати ці звуки як корисний сигнал; - через те, що система адаптації підсилювачів має певну затримку, швидкомінливий звук від транспорту, який проїжджає, від людей, які проходять мимо і розмовляють, не буде компенсований системою адаптації підсилювачів, і ці сигнали потраплять на вихід відомої системи шумозаглушення як корисні; - і, як наслідок, невисока ефективність системи та її одноваріантність визначення виду шуму. В основу винаходу покладена задача створення синфазної системи шумозаглушення, що має підвищену ефективність і багатоваріантність визначення виду шуму. Зазначений технічний результат досягається тим, що в синфазну систему шумозаглушення, яка містить перший і другий мікрофони, відповідно перший і другий підсилювачі, перший і другий аналого-цифрові перетворювачі, додатково введені третій і четвертий мікрофони, відповідно третій і четвертий підсилювачі, третій і четвертий аналогоцифрові перетворювачі, процесорний блок, який містить перший і другий крос-кореляційні фільтри, детектор активності голосу, що включає перший і другий низькочастотні фільтри і визначник наявності або відсутності голосу, генератор рожевого шуму, комутатор сигналів, перший і другий цифроаналогові перетворювачі, причому послідовно з'єднані відповідно перший і другий мікрофони, перший і другий підсилювачі, перший і другий аналого-цифрові перетворювачі утворюють перший вхідний кластер мікрофонів, а послідовно з'єднані відповідно третій і четвертий мікрофони, третій і четвертий підсилювачі, третій і четвертий аналогоцифрові перетворювачі утворюють відповідно другий вхідний кластер мікрофонів, у кожному з яких перший і другий, третій і четвертий мікрофони розташовані парами на відстані d1 один від одного, причому відстань між вхідними кластерами мікрофонів d2 більше за відстань d1, а виходи першого і другого, третього і четвертого аналого-цифрових перетворювачів є відповідно першими і другими виходами першого і другого вхідних кластерів мікрофонів і з'єднані з першими і другими входами процесорного блока, які є також входами першого і другого крос - кореляційних фільтрів, виходи яких 5 з'єднані з першим і другим входами детектора активності голосу, які є входами низькочастотних фільтрів, виходи яких з'єднані з першим та другим входами визначника наявності або відсутності голосу, вихід якого є виходом детектора активності голосу і з'єднаний з керуючим входом комутатора сигналів, перший, другий і третій входи якого з'єднані відповідно з виходами першого і другого кроскореляційних фільтрів і з виходом генератора рожевого шуму, а перший і другий виходи комутатора сигналів з'єднані відповідно з входами першого і другого цифро-аналогових перетворювачів, виходи яких є виходами процесорного блока й одночасно виходами синфазної системи шумозаглушення. Крім того, визначник наявності або відсутності голосу виконаний зі змінним часовим вікном детектування сигналів, при цьому час детектування для визначення наявності голосу і час детектування для визначення відсутності голосу є різним і задається процесорному блоку поза рамками системи. Крім того, усі компоненти процесорного блока розміщені на одній мікросхемі. Порівняльний аналіз технічного рішення, що заявляється, із прототипом дозволяє виявити наявність істотних відмітних ознак, що підтверджує його відповідність критерію «новизна». Порівняння технічного рішення, що заявляється, не тільки з прототипом, але і з іншими технічними рішеннями в галузі цифрової обробки сигналів не дозволило виявити технічні рішення з подібною сукупністю ознак, що дозволяє зробити висновок про відповідність синфазної системи шумозаглушення, що заявляється, критерію «винахідницький рівень». Винахід пояснюється графічними матеріалами. На Фіг.1 наведена структурна схема синфазної системи шумозаглушення, що заявляється; на Фіг.2 - структурна схема процесорного блока; на Фіг.3 - схема детектора наявності голосу; на Фіг.4 наведена осцилограма даних на входах кластера мікрофонів синфазної системи шумозаглушення із шумами електроніки; на Фіг.5 - осцилограма сигналів після обробки крос - кореляційним фільтром, містять корисний звуковий сигнал і сигнал шуму навколишнього середовища, без шуму електроніки; на Фіг.6 - осцилограма сигналів перед обробкою їх низькочастотними фільтрами, містять корисний звуковий сигнал і сигнал шуму навколишнього середовища; на Фіг.7 - осцилограма сигналів після обробки їх низькочастотними фільтрами, містять тільки низькочастотні складові корисного звукового сигналу і сигналу шуму навколишнього середовища. Синфазна система шумозаглушення (Фіг.1) містить перший 1 і другий 2 вхідні кластери мікрофонів, кожний з яких містить два мікрофони, вихід кожного з яких з'єднаний з послідовно з'єднаними підсилювачем і аналого-цифровим перетворювачем, а виходи аналого-цифрових перетворювачів є виходами вхідних кластерів мікрофонів (на схемі для спрощення детально розкритий один кластер), 87510 6 при цьому мікрофони розташовані парами на відстані d1 один від одного, а відстань між вхідними кластерами мікрофонів складає d2, процесорний блок 3 (Фіг.2), який містить перший 4 і другий 5 крос - кореляційні фільтри, детектор активності голосу 6, генератор рожевого шуму 7, комутатор сигналів 8, перший 9 і другий 10 цифро - аналогові перетворювачі, при цьому детектор активності голосу 6 (Фіг.3) містить перший 11 і другий 12 низькочастотні фільтри і визначник наявності або відсутності голосу 13, причому виходи першого 1 і другого 2 вхідних кластерів мікрофонів з'єднані з першими і другими входами процесорного блока 3, які є також входами першого 4 і другого 5 крос кореляційних фільтрів, виходи яких з'єднані з першим і другим входами детектора активності голосу 6, які є входами першого 11 і другого 12 низькочастотних фільтрів, виходи яких з'єднані з першим та другим входами визначника наявності або відсутності голосу 13, вихід якого є виходом детектора активності голосу 6 і з'єднаний з керуючим входом комутатора сигналів 8, перший, другий і третій входи якого з'єднані відповідно з виходами першого 4 і другого 5 крос - кореляційних фільтрів і з виходом генератора рожевого шуму 7, а перший і другий виходи комутатора сигналів 8 з'єднані відповідно с входами першого 9 і другого 10 цифро аналогових перетворювачів, виходи яких є виходами процесорного блока 3 і одночасно виходами синфазної системи шумозаглушення. Робота пропонованої синфазної системи шумозаглушення відбувається наступним чином. Звуковий сигнал від джерела корисного сигналу разом з коливаннями навколишнього повітря надходить на вхід вхідних кластерів мікрофонів 1 і 2, кожний з яких складається з пари розташованих на відстані d1, що дорівнює » 3-6мм, один від одного мікрофонів, виходи яких з'єднані з входами підсилювачів, виходи яких з'єднані з входами аналого-цифрових перетворювачів. Перетворені в кластерах 1 і 2 аналогові сигнали у вигляді двох цифрових потоків, сфазованих за низькою частотою звукового сигналу і несфазованих за високочастотним шумом, надходять у процесорний блок 3, що містить крос - кореляційні фільтри 4 і 5, детектор активності голосу 6, генератор рожевого шуму 7, комутатор сигналів 8, цифро-аналогові перетворювачі 9 і 10. Ступінь фазування сигналів залежить від рівня сигналу і напрямку його приходу, що на практиці означає, що несфазований сигнал породжений шумом електроніки мікрофонів, підсилювачів, аналого-цифрових перетворювачів, а сфазований сигнал породжений синхронним коливанням мембран мікрофонів. Механічні коливання мембран мікрофонів у кластерах 1 і 2 при відстані до джерела сигналу значно більшій, ніж відстань між мікрофонами у кластері, будуть з достатньою точністю синхронними як для корисного сигналу, так і для сигналу, який містить переважно шум. При проходженні через крос-кореляційні фільтри 4 і 5 процесорного блока 3 несинхронні складові цифрових потоків сигналу заглушуються, а синхронні складові цих потоків проходять на вихід кроскореляційних фільтрів 4 і 5, являючи собою ре 7 зультат механічних коливань або звуковий сигнал, очищений від електронного шуму. Вихідний сигнал крос-кореляційних фільтрів 4 і 5 містить як корисний звуковий сигнал, так і шум навколишнього середовища. Для виділення тільки корисного сигналу, що йде з певного напрямку за умови, що відстань від кожного вхідного кластера мікрофонів 1 і 2 до джерела корисного звукового сигналу L буде однаковою, причому L ³ d2, відстань між вхідними кластерами мікрофонів 1 і 2 встановлюють рівною d2, що значно більше за відстань d1 між мікрофонами в кластері. Тоді на виході відповідних крос - кореляційних фільтрів 4 і 5 будуть отримані синфазні сигнали для корисного сигналу і несинфазні для сигналу від інших, шумових джерел. Наявність корисного звукового сигналу визначають за допомогою детектора наявності голосу 6, який складається з низькочастотних фільтрів 11 і 12 та визначника наявності або відсутності голосу 13. Для цього вихідні сигнали з низькочастотних фільтрів (як більш синхронізовані сигнали) аналізуються на синхронність вершин сигналів за певний час (часове вікно). Якщо число збігів вершин в обох потоках сигналів за заданий час перевищує задане максимальне число, то на виході детектора активності голосу 6 з'являється сигнал, рівний одиниці, це значить, що на входах вхідних кластерів мікрофонів 1 і 2 є корисний звуковий сигнал, який йде із заданого напрямку. Якщо число збігів вершин в обох потоках сигналів за заданий час менше заданого мінімального числа, то на виході детектора активності голосу 6 з'являється сигнал, рівний нулю, це значить, що на входах вхідних кластерів мікрофонів 1 і 2 є звуковий сигнал, який йде з інших напрямків. Усі сигнали, отримані на виходах кроскореляційних фільтрів 4 і 5, містять звуковий сигнал, який у кожному конкретному застосуванні може мати своє значення. Наприклад, для систем зв'язку важливий сигнал, який йде з обраного напрямку, а для систем сигналізації - сигнал з інших напрямків, крім заданого. Сигнали з виходів крос-кореляційних фільтрів 4 і 5, тобто сигнали, які містять мовлення і шум без обробки, сигнали з детектора активності голосу 6, тобто сигнали, які містять тільки низькочастотну складову мовлення, а також сигнали з генератора рожевого шуму 7 подаються на комутатор сигналів 8, керований детектором активності голосу 6. З виходів комутатора сигналів 8 при значенні на виході детектора активності голосу 6, рівному одиниці, видаються або сигнал виходів крос - кореляційних фільтрів 4 і 5, або сигнали, які містять низькочастотну складову мовлення, або, при значенні на виході детектора активності голосу 6, рівному нулю, видаються сигнали з генератора рожевого шуму 7, або сигнали з крос-кореляційних фільтрів 4 і 5, або сигнали, які містять низькочастотну складову мовлення. З комутатора сигналів 8 цифрові сигнали подаються на цифро-аналогові перетворювачі 9 і 10, з виходів яких знімаються 87510 8 аналогові сигнали, які можуть піддаватися подальшій обробці або можуть надходити прямо на вхід пристрою мобільного контенту. При цьому на вихід системи шумозаглушення, що заявляється, можуть бути подані: - повний, нефільтрований сигнал при активному стані детектора активності голосу і рожевий шум з невеликим рівнем при неактивному стані детектора активності голосу, що дозволяє одержати не спотворений звук із заданого напрямку без навколишнього шуму при його деякому заданому рівні звуку; - фільтрований сигнал при активному стані детектора активності голосу і рожевий шум з невеликим рівнем при неактивному стані детектора активності голосу, що дозволить одержати фільтрований звук із заданого напрямку без навколишнього шуму при його деякому заданому рівні; - нефільтрований сигнал при неактивному стані детектора активності голосу і рожевий шум з невеликим рівнем при активному стані детектора активності голосу, що дозволить одержати не спотворений звук з інших напрямків. Таким чином, синфазна система шумозаглушення приймає на вхід мінімум чотири сигнали з двох пар мікрофонів, а на виході видає мінімум пару аналогових сигналів із заглушеними шумами, відповідних синфазним сигналам із джерела корисного сигналу, розміщеного на середній лінії, перпендикулярній лінії, на якій розміщені кластери мікрофонів. Усі елементи системи шумозаглушення, що заявляється (крім вхідних кластерів мікрофонів), можуть бути реалізовані на одному кристалі (мікросхемі), наприклад, типу 38051F120, що випускається фірмою Silicon Labs або іншими фірмами США, наприклад Analog Device, Texas Instruments. У даній мікросхемі є всі засоби для реалізації крос - кореляційних фільтрів, детектора активності голосу, низькочастотних фільтрів, а її процесорне ядро має швидкодію, достатню для обробки сигналів у реальному часі. Мікросхема має мале енергоспоживання, малі габарити і масу, що дозволяє одержати готовий пристрій, який вбудовується в різні аксесуари (наприклад, авторучку, захисну каску). Виходячи з викладеного, можна констатувати, що використання синфазної системи шумозаглушення, що заявляється, із зазначеною сукупністю ознак дозволяє вирішити поставлену задачу, а саме, підвищити ефективність системи шумозаглушення і надати їй здатність багатоваріантного визначення виду шуму. На дату подачі заявки виготовлено три дослідні зразки синфазної системи шумозаглушення, що заявляється, що підтверджує життєздатність принципів, покладених в основу її створення, а також доводить її працездатність, з чого можна зробити висновок про відповідність технічного рішення, що заявляється, критерію «промислова застосовність». 9 87510 10 11 87510 12 13 Комп’ютерна верстка Н. Лиcенко 87510 Підписне 14 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюIn-phase suppression noise system
Автори англійськоюPolivtsev Serhii Oleksandrovych, Shevchenko Anatolii Ivanovych
Назва патенту російськоюСинфазная система шумопоглощения
Автори російськоюПоливцев Сергей Александрович, Шевченко Анатолий Иванович
МПК / Мітки
МПК: H04R 3/00, H04B 15/00
Мітки: шумозаглушення, система, синфазна
Код посилання
<a href="https://ua.patents.su/7-87510-sinfazna-sistema-shumozaglushennya.html" target="_blank" rel="follow" title="База патентів України">Синфазна система шумозаглушення</a>
Спосіб поліпшення передавання інформаційного сигналу у інформаційному каналі та система зв’язку cdma з таким каналом (варіанти)
Номер патенту: 74153
Опубліковано: 15.11.2005
Автор: Ландбі Стайн А.
МПК: H04B 1/00, H04B 15/00, H04B 1/10, H04B 17/00
Мітки: сигналу, каналом, зв'язку, таким, система, каналі, передавання, інформаційного, поліпшення, варіанти, інформаційному, спосіб
Формула / Реферат:
1. Cпосіб поліпшення передавання інформаційного сигналу, що несе інформацію повідомлення у системі зв'язку CDMA з інформаційним каналом, який полягає в тому, що(а) приймають переданий по інформаційному каналу сигнал, який містить шум,(б) виділяють інформацію повідомлення з прийнятого інформаційного сигналу для одержання послідовності символів,(в) проводять послідовність символів через перший фільтр для одержання першого...
Відмовостійка система з аналізом ресурсу
Номер патенту: 36473
Опубліковано: 27.10.2008
Автор: Кулік Анатолій Степанович
МПК: G06F 11/18
Мітки: аналізом, ресурсу, система, відмовостійка
Формула / Реферат:
Відмовостійка система з аналізом ресурсу, яка має блоки, що резервуються, елементи нерівнозначність, елементи І, пороговий елемент, вихід системи, перший і другий двійковий лічильники, перший і другий елементи АБО, n детекторів фронту, n детекторів спаду, виходи індикації технічного стану, арифметичний пристрій, дві групи інформаційних виходів, причому вихід і-го блока, що резервується, з'єднаний з першим входом і-го елемента І, вихід і-го...
Спосіб шумозаглушення у системах зв’язку
Номер патенту: 41913
Опубліковано: 15.10.2001
Автор: Вінн Вудсон Дейл
МПК: H04B 15/02, H04B 15/00
Мітки: шумозаглушення, системах, зв'язку, спосіб
Формула / Реферат:
1.Способ обработки входного сигнала с речевой и шумовой мощностью в телекоммуникационной сети с использованием итерируемого фильтра на базе речевой модели кодирования с линейным предсказанием (КЛП), имеющего узлы установления порядка и эквивалентного представления полярных позиций речевой модели КЛП с позиционными корнями и разностными корнями линейной спектральной пары (ЛСП) и предназначенного для оценки спектра речевой мощности входного...
Система передачі інформації
Номер патенту: 53713
Опубліковано: 17.02.2003
Автори: Дегтярев Андрій Миколайович, Бабуров Едуард Федорович
МПК: H04B 7/00
Мітки: інформації, система, передачі
Формула / Реферат:
Система передачі інформації, що має у передавальній частині генератор шумоподібних сигналів (ШПС), джерело цифрового сигналу і суматор, а в приймальній частині N фільтрів, погоджених з сигналом генератора ШПС передавальної частини, виходи яких з'єднані з входом блока вирішення, яка відрізняється тим, що в передавальній частині введено N-канальний кодер, генератор N ортогональних сигналів і блок перемножування, а в приймальній частині введено...
Аналого-цифрова приймальна система
Номер патенту: 21890
Опубліковано: 10.04.2007
Автори: Крупінов Юрій Олександрович, Мейстер Юрій Лазаревич, Траілін Вячеслав Федорович
МПК: G01S 7/285
Мітки: аналого-цифрова, система, приймальна
Формула / Реферат:
Аналого-цифрова приймальна система, яка містить аналого-цифровий перетворювач, на перший вхід якого надходить вхідний сигнал, а вихід з'єднаний відповідно з першим входом перемножувача, вихід якого з'єднаний з першим входом першого суматора, вихід якого з'єднаний відповідно з першими входами першої лінії затримки, першого та другого регістрів; імпульс початкової установки надходить на вхід першого блока керування, перший, другий, третій,...
Попередній патент: Способи перетворення алканів на відповідні вуглеводні в зонному реакторі
Наступний патент: Реактор з нерухомим шаром каталізатора
Випадковий патент: Спосіб отримання електроліту для суперконденсатора