Спосіб виділення тактового коливання в автокореляційному приймачі фазомодульованих сигналів та пристрій для його здійснення
Номер патенту: 89375
Опубліковано: 25.01.2010
Автори: Балашов Віталій Олександрович, Пантєлєєв Віктор Володимирович, Ляховецький Леонід Михайлович



Формула / Реферат
1. Спосіб виділення тактового коливання в автокореляційному приймачі фазомодульованих сигналів, який полягає в тому, що вхідний аналоговий ВФМ-сигнал з невідомою затримкою перетворюють у відкоригований аналоговий ВФМ-сигнал, крім того, виділяють, за допомогою синхронного сигналу тактового коливання, сигнал цифрової інформації, який відрізняється тим, що відкоригований аналоговий ВФМ-сигнал, за допомогою некогерентного сигналу несучого коливання, перетворюють в аналоговий несинхронний ВФМ-сигнал, який, з використанням синхронного сигналу тактового коливання, перетворюють у дискретний некогерентний низькочастотний ВФМ-сигнал, з якого формують автокореляційно демодульований дискретний ВФМ-сигнал і виділяють сигнал цифрової інформації, а також шляхом нелінійної обробки автокореляційно демодульованого дискретного ВФМ-сигналу і сигналу цифрової інформації виділяють сигнал похибки невідомої затримки, який перетворюють у сигнал невідомої затримки і формують синхронний сигнал тактового коливання, замикаючи тим самим коло зворотного зв'язку адаптивної оцінки невідомої затримки.
2. Пристрій для виділення тактового коливання в автокореляційному приймачі фазомодульованих сигналів, який містить послідовно з'єднані по входу пристрою смуговий фільтр і регульований підсилювач прийому, вихід якого з'єднаний з першим входом блока несинхронної демодуляції, до другого входу якого підключений опорний некогерентний генератор, вирішальні схеми по синфазному та квадратурному каналах у блоці прийняття рішення, відповідні синфазний і квадратурний виходи яких є виходами блока прийняття рішення, а також синфазним і квадратурним виходами пристрою в цілому і, при цьому, паралельно підключені до першого синфазного та квадратурного входів блока виділення тактового коливання, вихід якого з'єднаний з об'єднаними по других входах вирішальними схемами, що є третім входом блока прийняття рішення, крім того,блок несинхронної демодуляції містить демодулятори і фільтри нижніх частот по синфазному та квадратурному каналах, а також фазообертач, при цьому перші входи демодуляторів об'єднані по першому входу блока несинхронної демодуляції, а виходи паралельно з'єднані з відповідними входами фільтрів нижніх частот синфазного та квадратурного каналів, виходи яких є синфазним і квадратурним виходами блока несинхронної демодуляції, другий вхід демодулятора синфазного каналу, а також другий вхід демодулятора квадратурного каналу через фазообертач об'єднані і є другим входом блока несинхронної демодуляції, який відрізняється тим, що в нього введені дискретизатори по синфазному та квадратурному каналах і блок автокореляційної демодуляції, синфазний і квадратурний входи якого паралельно через перші входи дискретизаторів з'єднані з відповідними синфазними та квадратурними виходами блока несинхронної демодуляції, другі входи дискретизаторів об'єднані і підключені до виходу блока виділення тактового коливання, другий синфазний і квадратурний входи якого з'єднані з відповідно об'єднаними синфазним і квадратурним входами блока прийняття рішення та синфазним і квадратурним виходами блока автокореляційної демодуляції, котрий містить по кожному каналу перший і другий перемножувачі, перший елемент затримки і перший суматор зі знаком, причому по синфазному та квадратурному каналах перші входи першого і другого перемножувачів і вхід першого елемента затримки об'єднані по синфазному та квадратурному входах блока автокореляційної демодуляції, виходи перших перемножувачів синфазного та квадратурного каналів з'єднані з першими входами перших суматорів зі знаком, виходи яких є синфазним та квадратурним виходами блока автокореляційної демодуляції, другі входи перших суматорів зі знаком синфазного та квадратурного каналів підключені до виходу других перемножувачів квадратурного та синфазного каналів, крім цього, об'єднані другі входи перших і об'єднані другі входи других перемножувачів підключені до виходів перших елементів затримки синфазного та квадратурного каналів відповідно.
3. Пристрій за п. 2, який відрізняється тим, що блок виділення тактового коливання містить по синфазному та квадратурному каналах другий, третій і четвертий елементи затримки, другий суматор зі знаком, багатовходовий суматор та третій перемножувач, при цьому по синфазному та квадратурному каналах входи других елементів затримки, другі входи других суматорів зі знаком та треті входи багатовходових суматорів об'єднані і є відповідно першим синфазним та першим квадратурним входами блока виділення тактового коливання, другий синфазний та квадратурний входи якого є першими входами других суматорів зі знаком, вихід других елементів затримки по кожному синфазному та квадратурному каналах з'єднані із другим входом багатовходових суматорів безпосередньо і з першим входом через треті елементи затримки, виходи багатовходових суматорів паралельно з'єднані з першими входами третіх перемножувачів, крім цього, другий вхід третіх перемножувачів синфазного та квадратурного каналів через четвертий елемент затримки протилежного квадратурного та синфазного каналу підключений до виходу другого суматора зі знаком квадратурного та синфазного каналів, а також основний суматор зі знаком, перший і другий входи якого з'єднані з виходами третіх перемножувачів синфазного та квадратурного каналів, а вихід через послідовно з'єднані по першому входу основний суматор, основний елемент затримки та підсилювач рівня сигналу підключений до входу генератора, що підстроюється, вихід якого є виходом блока виділення тактового коливання, при цьому другий вхід основного суматора підключений до виходу основного елемента затримки.
Текст
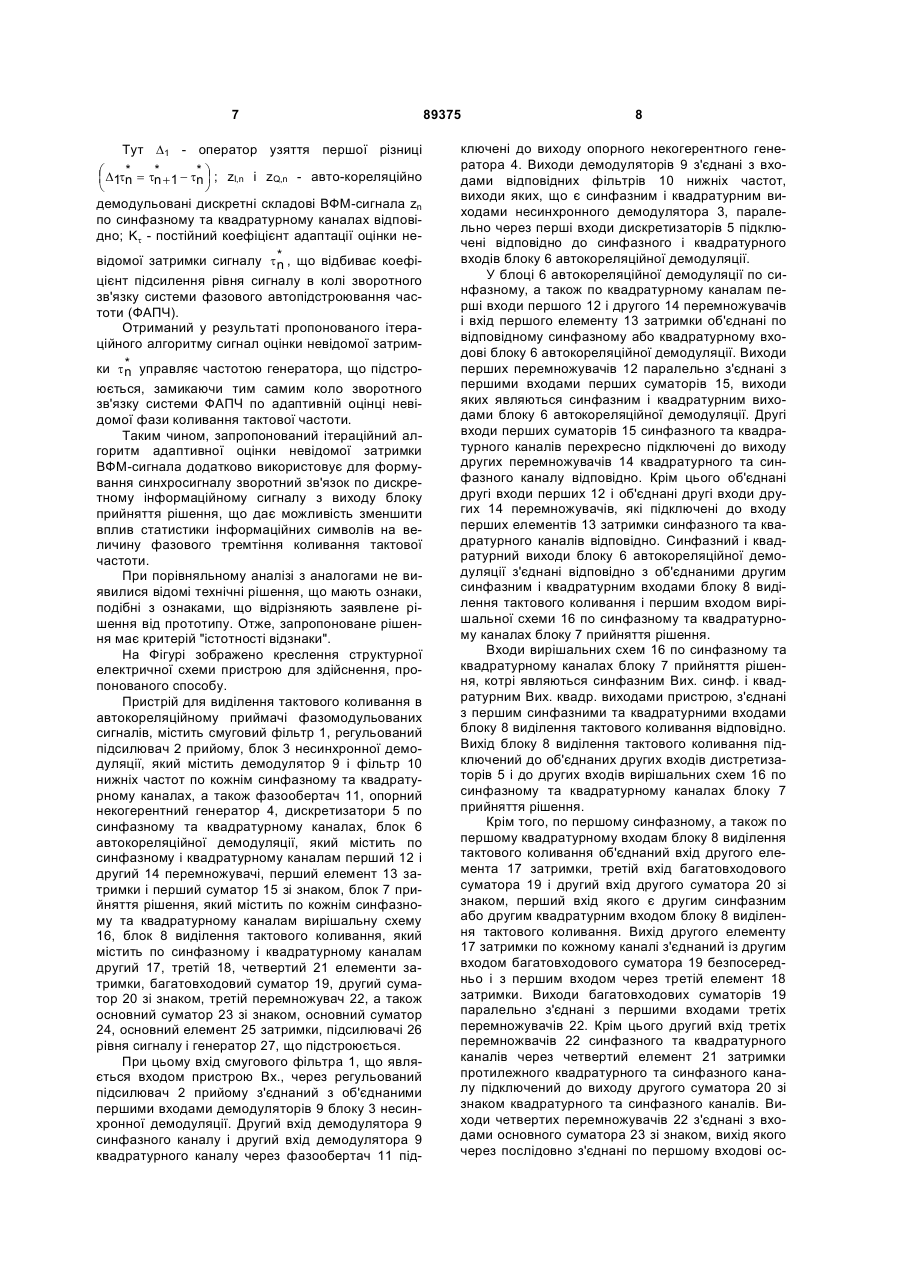
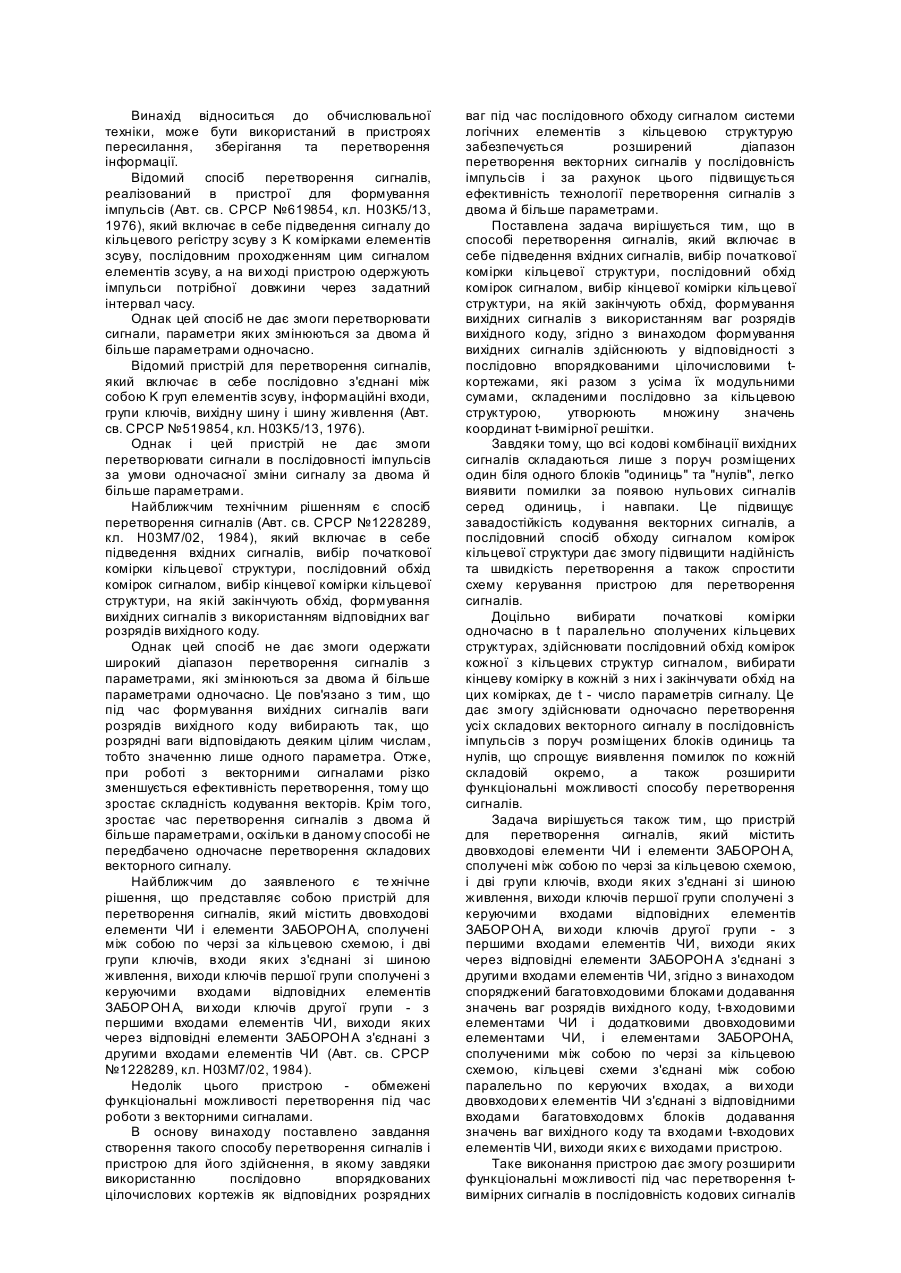
1. Спосіб виділення тактового коливання в автокореляційному приймачі фазомодульованих сигналів, який полягає в тому, що вхідний аналоговий ВФМ-сигнал з невідомою затримкою перетворюють у відкоригований аналоговий ВФМсигнал, крім того, виділяють, за допомогою синхронного сигналу тактового коливання, сигнал цифрової інформації, який відрізняється тим, що відкоригований аналоговий ВФМ-сигнал, за допомогою некогерентного сигналу несучого коливання, перетворюють в аналоговий несинхронний ВФМ-сигнал, який, з використанням синхронного сигналу тактового коливання, перетворюють у дискретний некогерентний низькочастотний ВФМсигнал, з якого формують автокореляційно демодульований дискретний ВФМ-сигнал і виділяють сигнал цифрової інформації, а також шляхом нелінійної обробки автокореляційно демодульованого дискретного ВФМ-сигналу і сигналу цифрової інформації виділяють сигнал похибки невідомої затримки, який перетворюють у сигнал невідомої затримки і формують синхронний сигнал тактового 2 (19) 1 3 89375 4 тить по кожному каналу перший і другий перемноті входи багатовходових суматорів об'єднані і є жувачі, перший елемент затримки і перший сумавідповідно першим синфазним та першим квадратор зі знаком, причому по синфазному та квадратурним входами блока виділення тактового колитурному каналах перші входи першого і другого вання, другий синфазний та квадратурний входи перемножувачів і вхід першого елемента затримки якого є першими входами других суматорів зі знаоб'єднані по синфазному та квадратурному входах ком, вихід других елементів затримки по кожному блока автокореляційної демодуляції, виходи персинфазному та квадратурному каналах з'єднані із ших перемножувачів синфазного та квадратурного другим входом багатовходових суматорів безпоканалів з'єднані з першими входами перших сумасередньо і з першим входом через треті елементи торів зі знаком, виходи яких є синфазним та квадзатримки, виходи багатовходових суматорів параратурним виходами блока автокореляційної демолельно з'єднані з першими входами третіх передуляції, другі входи перших суматорів зі знаком множувачів, крім цього, другий вхід третіх пересинфазного та квадратурного каналів підключені множувачів синфазного та квадратурного каналів до виходу других перемножувачів квадратурного через четвертий елемент затримки протилежного та синфазного каналів, крім цього, об'єднані другі квадратурного та синфазного каналу підключений входи перших і об'єднані другі входи других передо виходу другого суматора зі знаком квадратурмножувачів підключені до виходів перших елеменного та синфазного каналів, а також основний сутів затримки синфазного та квадратурного каналів матор зі знаком, перший і другий входи якого з'єдвідповідно. нані з виходами третіх перемножувачів 3. Пристрій за п. 2, який відрізняється тим, що синфазного та квадратурного каналів, а вихід чеблок виділення тактового коливання містить по рез послідовно з'єднані по першому входу основсинфазному та квадратурному каналах другий, ний суматор, основний елемент затримки та підтретій і четвертий елементи затримки, другий сусилювач рівня сигналу підключений до входу матор зі знаком, багатовходовий суматор та третій генератора, що підстроюється, вихід якого є вихоперемножувач, при цьому по синфазному та кваддом блока виділення тактового коливання, при ратурному каналах входи других елементів затрицьому другий вхід основного суматора підключемки, другі входи других суматорів зі знаком та трений до виходу основного елемента затримки. Винахід належіть до електрозв'язку і може бути використаний для виділення коливання тактової частоти в синхронних системах передачі даних (модемах) із багатопозиційними сигналами відносно-фазовою модуляцією (ВФМ). Відомі способи виділення коливання тактової частоти [1, 2], і пристрої для їхнього здійснення [3, 4], у яких для виділення синхроінформації і подальшого керування частотою тактового генератора, що підстроюється, використовуються тільки низькочастотні (демодульовані) ВФМ-сигнали із синфазного та квадратурного виходів автокореляційного демодулятора, так, щоб мінімізувати якийсь критерій якості, наприклад, мінімум середньоквадратичної помилки на вході вирішальної схеми приймача. Однак ці способи і пристрої їх здійснюючі мають істотний недолік, що полягає у формуванні коливання тактової частоти без урахування сигналу цифрової інформації. Зазначений факт, як наслідок, призводить до збільшення фазового тремтіння за рахунок систематичної складової, що обумовлена статистикою переданих інформаційних символів. Найбільш близьким по технічній сутності до запропонованого є «Спосіб виділення тактових сигналів прийому та пристрій для здійснення цього способу», що описаний у заявці ФРН №2738279 [1] (прототип), який полягає в тому, що вхідний аналоговий ВФМ-сигнал з невідомою затримкою перетворять у відкоригований аналоговий ВФМ-сигнал, котрий за допомогою когерентного сигналу несучого коливання, перетворюють у аналоговий низькочастотний ВФМ-сигнал і виділяють сигнал цифрової інформації за допомогою синхронного сигналу тактового коливання, який також як і когерентний сигнал несучого коливання формують з аналогового низькочастотного ВФМ-сигналу. У матеріалах заявки [1] прототипу наведені три можливих варіанти побудови пристроїв виділення тактового коливання. Кожний з варіантів використовує у своїй структурі для виділення синхроінформації про невідому затримку прийнятого сигналу нелінійні устрої обробки тільки синхронних низькочастотних (демодульованих) синфазної і квадратурної складових фазомодульованого сигналу з наступним управлінням частотою генератора, що підстроюється. Недоліком відомого способу та реалізуючого його пристрою є вплив інформаційних символів сигналу цифрової інформації на величину дисперсії виділеної фази коливання тактової частоти, що збільшує систематичну складову фазового тремтіння. Зазначений недолік у свою чергу призводить до істотного погіршення завадостійкості приймача фазомодульованих сигналів і, наприкінці, до збільшення ймовірності помилок модему в цілому. Метою винаходу є зменшення фазового тремтіння коливання тактової частоти. Поставлена мета досягається тим, що в способі виділення тактового коливання в автокореляційному приймачі фазомодульованих сигналів вхідний аналоговий ВФМ-сигнал з невідомою затримкою перетворюють у відкоригований аналоговий ВФМ-сигнал, з якого, за допомогою некогерентного сигналу несучого коливання, виділяють аналоговий несинхронний ВФМ-сигнал, який, з використанням синхронного сигналу тактового коливання, перетворюють у дискретний некогере 5 89375 6 нтний низькочастотний ВФМ-сигнал, з якого форзному та квадратурному входах блока автокоремують автокореляційно демодульований дискретляційної демодуляції, виходи перших перемножуний ВФМ-сигнал і виділяють сигнал цифрової інвачів синфазного та квадратурного каналів формації, а також шляхом нелінійної обробки з'єднані з першими входами перших суматорів зі автокореляційно демодульованого дискретного знаком, виходи яких є синфазним та квадратурним ВФМ-сигналу і сигналу цифрової інформації видівиходами блока автокореляційної демодуляції, ляють сигнал похибки невідомої затримки, котрий другі входи перших суматорів зі знаком синфазноперетворюють у сигнал невідомої затримки і форго та квадратурного каналів підключені до виходу мують синхронний сигнал тактового коливання, других перемножувачів квадратурного та синфаззамикаючи тим самим коло зворотного зв'язку ного каналів, крім цього об'єднані другі входи перадаптивної оцінки невідомої затримки. ших і об'єднані другі входи других перемножувачів У пристрої для здійснення способу-прототипу, підключені до виходів перших елементів затримки що містить послідовно з'єднані по входу пристрою синфазного та квадратурного каналів відповідно, смуговий фільтр і регульований підсилювач прикрім того, блок виділення тактового коливання йому, вихід якого з'єднаний з першим входом бломістить по синфазному та квадратурному каналах ку несинхронної демодуляції, до другого входу другий, третій і четвертий елементи затримки, друякого підключений опорний некогерентний генерагий суматор зі знаком, багатовходовий суматор і тор, вирішальні схеми по синфазному та квадратретій перемножувач, при цьому по синфазному та турному каналах у блоці прийняття рішення, відквадратурному каналах входи других елементів повідні синфазний і квадратурний виходи яких є затримки, другі входи других суматорів зі знаком виходами блоку прийняття рішення, а також синта треті входи багатовходових суматорів об'єднані фазним і квадратурним виходами пристрою в ціі являються відповідно першим синфазним та пелому і при цьому паралельно підключені до перршим квадратурним входами блоку виділення такшого синфазного та квадратурного входам блоку тового коливання, другий синфазний та квадратувиділення тактового коливання, вихід якого з'єдрний входи якого є першими входами других наний з об'єднаними по другим входам вирішальсуматорів зі знаком, вихід других елементів затриним схемам, що являються третім входом блоку мки по кожному синфазному та квадратурному прийняття рішення, крім того блок несинхронної каналам з'єднані із другим входом багатовходових демодуляції містить демодулятори і фільтри нижсуматорів безпосередньо і з першим входом через ніх частот по синфазному та квадратурному канатреті елементи затримки, виходи багатовходових лах, а також фазообертач, при цьому перші входи суматорів паралельно підключені до перших входемодуляторів об'єднані по першому вході блоку дів третіх перемножувачів, крім цього другий вхід несинхронної демодуляції, а виходи паралельно третіх перемножувачів синфазного та квадратурз'єднані з відповідними входами фільтрів нижніх ного каналів через четвертий елемент затримки частот синфазного та квадратурного каналів, випротилежного квадратурного та синфазного канаходи яких є синфазним і квадратурним виходами лу підключений до виходу другого суматора зі знаблоку несинхронної демодуляції, другий вхід деком квадратурного та синфазного каналів, а також модулятора синфазного каналу, а також другий основний суматор зі знаком, перший і другий вховхід демодулятора квадратурного каналу через ди якого з'єднані з виходами третіх перемножувафазообертач об'єднані і являються другим входом чів синфазного та квадратурного каналів, а вихід блоку несинхронної демодуляції, введені дискречерез послідовно з'єднані по першому входу оснотизатори по синфазному та квадратурному канавний суматор, основний елемент затримки та підлах і блок автокореляційної демодуляції, синфазсилювач рівня сигналу підключений до входу гений і квадратурний входи якого паралельно через нератора, що підстроюється, вихід якого є перші входи дискретизаторів з'єднані з відповідвиходом блоку виділення тактового коливання, ними синфазними та квадратурними виходами при тому другий вхід основного суматора підклюблока несинхронної демодуляції, другі входи дисчений до виходу основного елемента затримки. кретизаторів об'єднані і підключені до виходу блоСуть запропонованого способу полягає в підку виділення тактового коливання, другий синфазвищенні завадостійкості автокореляційного приний і квадратурний входи якого з'єднані з йому дискретних сигналів відносно-фазової модувідповідно об'єднаними синфазним і квадратурним ляції за рахунок зменшення фазового тремтіння входами блоку прийняття рішення та синфазним і шляхом виділення сигналу коливання тактової квадратурним виходами блоку автокореляційної частоти з урахуванням дискретного інформаційнодемодуляції, котрий містить по кожному каналу го сигналу. Для цього у відлікові (тактові Т) nперший і другий перемножувачі, перший елемент моменти часу nТ, де n=0, 1, 2, 3,... формують синзатримки і перший суматор зі знаком, причому по t* хросигнал оцінки невідомої затримки n ВФМсинфазному та квадратурному каналах перші вхосигнала відповідно до наступного ітераційного ди першого і другого пермножувачів і вхід першого алгоритму елементу затримки об'єднані відповідно по синфа [( )( ) ( )( * ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ D1t n = K t zI,n - a n,n × b n,n -1 + b n,n + b n,n +1 - z Q,n - b n,n × a n,n -1 - a n,n + a n,n +1 )] 7 Тут D1 - оператор узяття першої різниці æ D t* = t* - t* ö ; z і z I,n Q,n - авто-кореляційно ç 1n n +1 n ÷ è ø демодульовані дискретні складові ВФМ-сигнала zn по синфазному та квадратурному каналах відповідно; Κt - постійний коефіцієнт адаптації оцінки не* відомої затримки сигналу t n , що відбиває коефіцієнт підсилення рівня сигналу в колі зворотного зв'язку системи фазового автопідстроювання частоти (ФАПЧ). Отриманий у результаті пропонованого ітераційного алгоритму сигнал оцінки невідомої затрим* ки t n управляє частотою генератора, що підстроюється, замикаючи тим самим коло зворотного зв'язку системи ФАПЧ по адаптивній оцінці невідомої фази коливання тактової частоти. Таким чином, запропонований ітераційний алгоритм адаптивної оцінки невідомої затримки ВФМ-сигнала додатково використовує для формування синхросигналу зворотний зв'язок по дискретному інформаційному сигналу з виходу блоку прийняття рішення, що дає можливість зменшити вплив статистики інформаційних символів на величину фазового тремтіння коливання тактової частоти. При порівняльному аналізі з аналогами не виявилися відомі технічні рішення, що мають ознаки, подібні з ознаками, що відрізняють заявлене рішення від прототипу. Отже, запропоноване рішення має критерій "істотності відзнаки". На Фігурі зображено креслення структурної електричної схеми пристрою для здійснення, пропонованого способу. Пристрій для виділення тактового коливання в автокореляційному приймачі фазомодульованих сигналів, містить смуговий фільтр 1, регульований підсилювач 2 прийому, блок 3 несинхронної демодуляції, який містить демодулятор 9 і фільтр 10 нижніх частот по кожнім синфазному та квадратурному каналах, а також фазообертач 11, опорний некогерентний генератор 4, дискретизатори 5 по синфазному та квадратурному каналах, блок 6 автокореляційної демодуляції, який містить по синфазному і квадратурному каналам перший 12 і другий 14 перемножувачі, перший елемент 13 затримки і перший суматор 15 зі знаком, блок 7 прийняття рішення, який містить по кожнім синфазному та квадратурному каналам вирішальну схему 16, блок 8 виділення тактового коливання, який містить по синфазному і квадратурному каналам другий 17, третій 18, четвертий 21 елементи затримки, багатовходовий суматор 19, другий суматор 20 зі знаком, третій перемножувач 22, а також основний суматор 23 зі знаком, основний суматор 24, основний елемент 25 затримки, підсилювачі 26 рівня сигналу і генератор 27, що підстроюється. При цьому вхід смугового фільтра 1, що являється входом пристрою Вх., через регульований підсилювач 2 прийому з'єднаний з об'єднаними першими входами демодуляторів 9 блоку 3 несинхронної демодуляції. Другий вхід демодулятора 9 синфазного каналу і другий вхід демодулятора 9 квадратурного каналу через фазообертач 11 під 89375 8 ключені до виходу опорного некогерентного генератора 4. Виходи демодуляторів 9 з'єднані з входами відповідних фільтрів 10 нижніх частот, виходи яких, що є синфазним і квадратурним виходами несинхронного демодулятора 3, паралельно через перші входи дискретизаторів 5 підключені відповідно до синфазного і квадратурного входів блоку 6 автокореляційної демодуляції. У блоці 6 автокореляційної демодуляції по синфазному, а також по квадратурному каналам перші входи першого 12 і другого 14 перемножувачів і вхід першого елементу 13 затримки об'єднані по відповідному синфазному або квадратурному входові блоку 6 автокореляційної демодуляції. Виходи перших перемножувачів 12 паралельно з'єднані з першими входами перших суматорів 15, виходи яких являються синфазним і квадратурним виходами блоку 6 автокореляційної демодуляції. Другі входи перших суматорів 15 синфазного та квадратурного каналів перехресно підключені до виходу других перемножувачів 14 квадратурного та синфазного каналу відповідно. Крім цього об'єднані другі входи перших 12 і об'єднані другі входи других 14 перемножувачів, які підключені до входу перших елементів 13 затримки синфазного та квадратурного каналів відповідно. Синфазний і квадратурний виходи блоку 6 автокореляційної демодуляції з'єднані відповідно з об'єднаними другим синфазним і квадратурним входами блоку 8 виділення тактового коливання і першим входом вирішальної схеми 16 по синфазному та квадратурному каналах блоку 7 прийняття рішення. Входи вирішальних схем 16 по синфазному та квадратурному каналах блоку 7 прийняття рішення, котрі являються синфазним Вих. синф. і квадратурним Вих. квадр. виходами пристрою, з'єднані з першим синфазними та квадратурними входами блоку 8 виділення тактового коливання відповідно. Вихід блоку 8 виділення тактового коливання підключений до об'єднаних других входів дистретизаторів 5 і до других входів вирішальних схем 16 по синфазному та квадратурному каналах блоку 7 прийняття рішення. Крім того, по першому синфазному, а також по першому квадратурному входам блоку 8 виділення тактового коливання об'єднаний вхід другого елемента 17 затримки, третій вхід багатовходового суматора 19 і другий вхід другого суматора 20 зі знаком, перший вхід якого є другим синфазним або другим квадратурним входом блоку 8 виділення тактового коливання. Вихід другого елементу 17 затримки по кожному каналі з'єднаний із другим входом багатовходового суматора 19 безпосередньо і з першим входом через третій елемент 18 затримки. Виходи багатовходових суматорів 19 паралельно з'єднані з першими входами третіх перемножувачів 22. Крім цього другий вхід третіх перемножвачів 22 синфазного та квадратурного каналів через четвертий елемент 21 затримки протилежного квадратурного та синфазного каналу підключений до виходу другого суматора 20 зі знаком квадратурного та синфазного каналів. Виходи четвертих перемножувачів 22 з'єднані з входами основного суматора 23 зі знаком, вихід якого через послідовно з'єднані по першому входові ос 9 89375 10 новний суматор 24, основний елемент 25 затримки [ ]ý Re[W (t )] = Reìe- j wc t + jo (t ) ü = cos(wc t + jo (t )) í і підсилювач 26 рівня сигналу підключений до вхоþ î ду генератора 27, що підстроюється, вихід якого являється виходом блоку 8 виділення тактового При чому напруга опорного некогерентного геколивання. При чому другий вхід основного суманератора 4, яка подана на другий вхід демодулятора 24 підключений до виходу основного елементора 9 квадратурного каналу, за допомогою фазота 25 затримки. обертача 11 зсунута по фазі на 90° Пристрій виділення тактового коливання в автокореляційному приймачі фазомодульованих [ ]ý сигналів працює за таким принципом. Im[W (t )] = Imìe- j wc t + jo (t ) ü = sin[wc t + jo (t )] í þ î Переданий ВФМ-сигнал, що пройшов смугообмежений канал зв'язку, надходить на вхід Вх. Результуючі сигнали з виходу демодуляторів 9 пристрою, де виділяється і коригується послідовно паралельно надходять на входи фільтрів 10 нижз'єднаними смуговим фільтром 1 і регульованим ніх частот, виходи яких є синфазним і квадратурпідсилювачем 2 прийому. Отриманий таким споним виходами блоку 3 несинхронної демодуляції. собом корисний відкоригований ВФМ-сигнал x(t), Таким чином, на виходах блоку 3 несинхронної аналітично може бути представлений у наступній демодуляції одержують синфазну уI(t) і квадратуркомплексній формі запису ну yQ(t) складові аналогового несинхронного ВФМсигнала Y(t,j,t) шляхом попередньої демодуляції x (t ) = Re[X(t )] = вхідного сигналу на некогерентне несуче коливанì k +L / 2 ü ï ï ня. = Reí å c n,ir [(i - k )T - t(t )] + x(t )ý exp {j[wc t + j c (t )]} ïi = k - L / 2 ï î þ y (t ) = Re[Y (t, j, t )] = Re[X(t ) × W (t )] = I Тут cn,n=exp(yn,n)=dn,n+jen,n - передані інформаційні символи сигналу цифрової інформації mn,i=exp(jn,i)=an,i+jbn,i, що перекодовані відповідно до правил сигнального сузір'я Μ-позиційного анn = 1, М самблю ΒΦΜ-сигналу ì n ü ï ï с n,n = Õ m n,i = exp í j å j n,i ý = exp y n,n ; ï i= 1 ï i= 1 î þ an,i=cosjn,i і bn,i=sinjn,i - синфазна та квадратурна складові ВФМ-сигнала цифрової інформації; який кодується; dn,n=cosyn,n і en,n=sinyn,n - синфазна і квадратурна складові переданого в канал зв'язку (який перекодується) ВФМ-сигнала; r(t)=g(t)+jh(t) комплексний імпульсний відгук низькочастотного еквівалента смугового каналу зв'язку, що складається із синфазної g(t) і квадратурної h(t) складових; x(t)=xI(t)+jxQ(t) - комплексний низькочастотний еквівалент флуктуаційного адитивного шуму, що складається із синфазної xI(t) і квадратурної xQ(t) складових; jc(t) і t(t) - невідомі фаза несучого коливання з частотою wc(t) і груповою затримкою ВФМ-сигнала відповідно; L - відносна тривалість міжсимвольної інтерференції (МСІ) у числі тактових інтервалів часу Т; k=Int{t/T} - ціла частина від виразу, що стоїть в дужках {t/T}; Re[X(t)] і Im[X(t)] узяття дійсної (реальної) і комплексно сполученої (мнимої) частини аналітичного сигналу X(t). Отже, виділення тактового коливання полягає в адаптивному відстеженні невідомої затримки ВФМ-сигнала t(t) з наступним управлінням частотою тактового генератора 27, що підстроюється. Для цього відкоригований аналоговий ВФМсигнал x(t) надходить на перші входи демодуляторів 9 синфазного та квадратурного каналів блоку 3 несинхронні демодуляції. На другі входи демодуляторів 9 подана напруга від опорного некогерентного генератора 4, частота якого дорівнює частоті прийнятого сигналу wс, а фаза jo(t) випадкова n ( ) ì k +L / 2 ü ï ï = Reí c n,ir [(i - k )T - t(t )] + x(t )ý exp[jfc (t )] ïi= k -L / 2 ï î þ å yQ (t ) = Im[Y(t, j, t )] = Im[X(t ) × W (t )] = ì k +L / 2 ü ï ï = Imí c n,ir [(i - k )T - t(t )] + x(t )ý exp[jfc (t )] ïi= k -L / 2 ï î þ ; å , де fc(t)=jc(t)-jo(t) - фазова похибка коливання несучої частоти, постійна часу зміни якої набагато більше тактового інтервалу проходження інформаційних символів tf>>Τ, тобто fn=fn-1. Сформовані синфазний yI(t) і квадратурний yQ(t) сигнали паралельно надходять на перші входи дискретизаторів 5, на другі входи яких від блоку 8 виділення тактового коливання поданий синхронний сигнал з тактовою частотою. Дискретизатори 5 стробують (вибирають) сигнали yI(t) й yQ(t) у відлікові (тактові Τ) n-моменти часу nТ, де n=0, 1, 2, 3,... й екстраполюють (запам'ятовують) їхні відлікові значення на тривалості тактового інтервалу від nТ до (n+1)Т. yI,n = Re[Y (t = nT )] = ì n +L / 2 ü ; ï ï = Re í å c n,ir [(i - n )T - tn ] + xn ý exp jfc,n ïi = n - L / 2 ï î þ y Q,n = Im[Y(t = nT )] = ( ) ì n +L / 2 ü , ï ï = Im í å c n,ir [(i - n )T - tn ] + xn ý exp jfc,n ïi = n - L / 2 ï î þ ( ) Дискретні несинхронні низькочастотні синфазна уI,n і квадратурна yQ,n складові ВФМ-сигнала уn надходять на відповідні входи блоку 6 автокореляційної демодуляції. При цьому блок 6 автокореляційної демодуляції, алгоритм роботи якого заснований на використанні фази коливання несучої 11 89375 12 частоти попереднього елементу сигналу в якості ходом блоку 8 виділення тактового коливання. На еталонного (опорного) значення, здійснює остатопідставі сформованих ВФМ-сигналів, блок 7 причну демодуляцію ВФМ-сигнала йняття рішення остаточно виносить рішення про ˆ переданий сигнал цифрової інформації mn,n роз [ ] zI,n = Re Yn × Yn -1 = yI,nyI,n - 1 + yQ,nyQ,n - 1 = ( ) ' ' = Re éc n,nc n,n - 1 + xn ù = cos yn,n - y n,n - 1 + xI,n = ê ú ë û ' ' ' = Re émn,n + xn ù = cos jn,n + xI,n = an,n + xI,n; ê ú ë û [ ] z Q,n = Im Yn × Yn -1 = - y I,n y Q,n -1 + y Q,n y I,n -1 = ( ) ' = Im éc n,n c n,n -1 + x n ù = sin y n,n - y n,n -1 + x 'Q,n = , ê ú ë û = Im ém n,n + x 'n ù = sin j n,n + x 'Q,n = b n,n + x 'Q,n ê ú ë û ' ' де x'n = xI,n + jxQ,n - адитивний шум на виході блоку 6 автокореляційної демодуляції; x - символ комплексного сполучення сигналу x. Для цього блок 6 автокореляційної демодуляції містить по синфазному, а також по квадратурному входах об'єднані перші входи першого 12 і другого 14 перемножуавчів і вхід першого елементу 13 затримки. Виходи перших перемножувачів 12 паралельно з'єднані з входами перших суматорів 15 зі знаком, виходи яких є синфазним та квадратурним виходами блоку 6 автокореляційної демодуляції. Другі входи перших суматорів 15 зі знаком синфазного та квадратурного каналів перехресно підключені до виходу других перемножувачів 14 квадратурного і синфазного каналу відповідно. Крім цього, об'єднані другі входи перших перемножувачів 12 підключені до виходу першого елемента 13 затримки синфазного каналу, а об'єднані другі входи других перемножувачів 14 підключені до виходу першого елемента 13 затримки квадратурного каналу. Отримані синфазний zI,n та квадратурний zQ,n автокореляційно демодульовані дискретні ВФМсигнали з виходів блоку 6 автокореляційної демодуляції паралельно надходять на відповідно об'єднані другий синфазний та квадратурний входи блоку 8 виділення тактового коливання і перші входи вирішальної схеми 16 по синфазному та квадратурному каналам блоку 7 прийняття рішення. Об'єднані другі входи вирішальних схем 16 по синфазному і квадратурному каналах, що є третім входом блоку 7 прийняття рішення, з'єднані з ви [( )( ˆ ˆ дільно по синфазному а n,n і квадратурному b n,n компонентах, що є відповідно першим Вих. 1 і другим Вих, 2 виходами пристрою. Блок 7 прийняття рішення виносить оцінку про ˆ ˆ синфазну а n,n та квадратурну b n,n складові вхідного ВФМ-сигнала в результаті мінімізації квадратичної помилки за евклідовим відстанням синфазного zl,n і квадратурного zQ,n автокореляційно демодульованих сигналів від проекції еталонних сигнальних точок an,i і bn,i на підставі наступної алгоритмічної операції ( ) ( ) ˆ ˆ an,n; b n,n = min -1ì zI,n - ai 2 - zQ,n - b j 2 ü ý í þ î i, j де min -1{F(i, j)} - функція, зворотна функції i, j min{F(i, j)} , тобто зміщена оцінка інформаційних i, j ˆ ˆ символів а n,n і b n,n дорівнює тому значенню з ансамблю дозволених станів, для яких функціонал F(i,j) мінімальний для усіх i; j = 1 М . , Дискретні сигнали цифрової інформації із сиˆ ˆ нфазного а n,n і квадратурного b n,n виходів блоку 7 прийняття рішення, що характеризують синфазні ˆ ˆ d n,n і квадратурну е n,n складові маніпуляції по фазі переданого несучого коливання протягом одного тактового інтервалу часу, надходять на перші синфазний і квадратурний входи блоку 8 виділення тактового коливання відповідно. У блоці 8 виділення тактового коливання на підставі автокореляційно демодульованих zI,n і zQ,n сигналів, а ˆ ˆ також сигналів цифрової інформації а n,n і b n,n формують синхросигнал оцінки невідомої затрим* ки t n , за допомогою якого управляють частотою генератора 27, що підстроюється, відповідно до ітераційного алгоритму ) ( )( * ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ D1tn = K t zI,n - a n,n × b n,n -1 + b n,n + b n,n +1 - z Q,n - b n,n × a n,n -1 - a n,n + a n,n +1 де D1 - оператор узяття першої різниці; Κt - коефіцієнт підсилення підсилювача 26 рівня сигналу в колі зворотного зв'язку системи фазового автопідстроювання частоти (ФАПЧ) для адаптивного управляння генератора 27, що підстроюється. Відповідно до алгоритму оцінки невідомої за* тримки сигналу t n , що заявляється, синфазний ˆ ˆ а n,n і квадратурний b n,n сигнали цифрової інформації надходять на об'єднані по кожнім першому синфазному і першому квадратурному входах )] блоку 8 виділення тактового коливання вхід другого елемента 17 затримки, третій вхід багатовходового суматора 19 і другий вхід другого суматора 20 зі знаком. На інші входи других суматорів 20 зі знаком подані відповідно автокореляційно демодульовані дискретні синфазний zl,n і квадратурний ZQ,n сигнали з виходів блоку 6 автокореляційної демодуляції. Вихід другого елемента 17 затримки кожного каналу з'єднаний із другим входом багатовходового суматора 19 безпосередньо і з першим входом через третій елемент 18 затримки. Виходи багатовходовых суматорів 19 паралельно 13 89375 14 Таким чином, введена сукупність відмінних з'єднані з першими входами третіх перемножуваознак дозволяє зменшити систематичну складову чів 22. При чому вхід третього перемножувача 22 фазового тремтіння коливання тактової частоти, синфазного каналу через четвертий елемент 21 що обумовлена статистикою переданих відносно затримки квадратурного каналу перехресно підключений до виходу другого суматора 20 зі знаком перекодованих інформаційних символів dn,n і en,n квадратурного каналу, а другий вхід третього пешляхом зняття маніпуляції по оціненим сигналам ремножувача 22 квадратурного каналу через четˆ ˆ цифрової інформації а n,n і b n,n . вертий елемент 21 затримки синфазного каналу Бібліографічні дані джерел інформації перехресно підключений до виходу другого сума1. Заявка 2738279 ФРГ, МКИ2 Η04L27/22. Способ тора 20 зі знаком синфазного каналу. выделения тактовых сигналов приема и устройстОтримані в результаті сигнали з виходів третіх во для осуществления этого способа - Опубл. в перемножувачів 22, поєднуються в основному суБ.И. "Аусцуге" (реферативный журнал), 1979; маторі 23 зі знаком, вихід якого через послідовно (прототип). з'єднані по першому входові основний суматор 24 і 2. Деклараційний патент України (UA) 42903 А основний елемент 25 затримки підключений до МПК6 Η06L7/00. Спосіб виділяння тактового синпершого входу підсилювача 26 рівня сигналу з хросигналу з корелятивно кодованого інформаційкоефіцієнтом підсилення, рівному Κt. Сукупність ного сигналу та пристрій для його здійснення / структури основного суматора 24 і основного елеПантелеев В.В., Ланько А.А., Гаврилюк М.С. мента 25 затримки, вихід якого з'єднаний із другим Опубл. в Бюл. "Промислова власність", 2001. входом основного суматора 24, складають дігра№10. тор - дискретний інтегратор, що здійснює ітерацій3. Заявка 2036513 Великобритания, Η04L27/02. но-різницеву процедуру формування оцінки невіСхема восстановления тактовой частоты - Опубл. * домої затримки сигналу t n . в Б.И. "Изобретения за рубежом", 1981. 4. Авторское свидетельство 1343558 СССР МКИ3 Сформований на основі нелінійної обробки Η04L7/02. Устройство для выделения тактового автокореляційно демодульованого zn сигналу і колебания в автокорреляционном приемнике. сигналу цифрової інформації m n,n синхросигнал Опубл. в Б.И., 1987. * невідомої затримки t n управляє частотою генератора 27, що підстроюється, вихід якого є виходом блоку 8 виділення тактового коливання. Комп’ютерна верстка О. Гапоненко Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for clock extraction in an autocorrelation receiver of phase-modulated signals and a device for emplimentation thereof
Автори англійськоюBalashov Vitalii Oleksandrovych, Panteleiev Viktor Volodymyrovych, Liakhovetskyi Leonid Mykhailovych
Назва патенту російськоюСпособ выделения тактового колебания в автокореляционном приемнике фазомодулированных сигналов и устройство для его осуществления
Автори російськоюБалашов Виталий Александрович, Пантелеев Виктор Владимирович, Ляховецкий Леонид Михайлович
МПК / Мітки
МПК: H04L 7/02, H04L 27/18
Мітки: тактового, автокореляційному, коливання, виділення, пристрій, сигналів, приймачі, фазомодульованих, здійснення, спосіб
Код посилання
<a href="https://ua.patents.su/7-89375-sposib-vidilennya-taktovogo-kolivannya-v-avtokorelyacijjnomu-prijjmachi-fazomodulovanikh-signaliv-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб виділення тактового коливання в автокореляційному приймачі фазомодульованих сигналів та пристрій для його здійснення</a>
Спосіб виділення тактового синхросигналу з кореляційно кодованого інформаційного сигналу та пристрій для його здійснення
Номер патенту: 42903
Опубліковано: 15.11.2001
Автори: Гаврилюк Марко Савелійович, Ланько Анатолій Анатолійович, Пантелєєв Віктор Володимирович
Мітки: синхросигналу, тактового, сигналу, спосіб, кодованого, виділення, здійснення, кореляційної, інформаційного, пристрій
Формула / Реферат:
1. Спосіб виділення тактового синхросигналу з кореляційно кодового інформаційного сигналу, який полягає в тому, що тактовий синхросигнал формують шляхом нелінійної обробки відкоректованого інформаційного сигналу, який відрізняється тим, що значення і знак тактового непогодження визначають на двотактному інтервалі безпосередньо з поточних око-переходів і використовують цю інформацію через зворотний зв'язок за прийнятим рішенням для відстеження...
Пазонний спосіб демодуляції і модуляції фазомодульованих сигналів та пристрій для його здійснення
Номер патенту: 62353
Опубліковано: 15.12.2003
Автори: Пилипец Віталій Владиславович, Хом'яков Євгеній Вікторович, Чередніков Павло Ілліч, Бондаренко Михайло Федорович, Сліпченко Миколай Іванович
МПК: H03D 3/00
Мітки: пристрій, здійснення, спосіб, модуляції, сигналів, пазонний, демодуляції, фазомодульованих
Формула / Реферат:
1. Пазонний спосіб демодуляції і модуляції фазомодульованих сигналів, що включає виділення з вхідного сигналу опорного, фазове детектування сигналів щодо опорного, перетворення сигналів неузгодженості у відповідні логічні рівні, який відрізняється тим, що настроюють усі пазонні системи на роботу у відповідній зоні нестійкості, збуджують і генерують у модулюючому тракті сигнал з фазою, відповідною вхідному сигналу, одержують опорний сигнал...
Спосіб когерентного прийому афм-сигналів без генератора, що керується напругою, та пристрій для його здійснення
Номер патенту: 80902
Опубліковано: 12.11.2007
Автори: Балашов Віталій Олександрович, Пантєлєєв Віктор Володимирович
МПК: H04L 27/227, H04L 7/04, H04L 27/22
Мітки: генератора, напругою, керується, пристрій, спосіб, когерентного, прийому, афм-сигналів, здійснення
Формула / Реферат:
1. Спосіб когерентного прийому АФМ-сигналів без генератора, що керується напругою, який полягає в тому, що вхідний аналоговий АФМ-сигнал з невідомою фазою за допомогою сигналу тактового коливання перетворюють у дискретний несинхронний АФМ-сигнал
Спосіб компенсації ехо-сигналів при дуплексному передаванні цифрових сигналів та пристрій для його здійснення
Номер патенту: 8026
Опубліковано: 26.12.1995
Автори: Хайнріх Зайлер, Геро Шольмайєр
МПК: H04B 3/20
Мітки: дуплексному, ехо-сигналів, спосіб, компенсації, сигналів, пристрій, здійснення, цифрових, передаванні
Формула / Реферат:
1. Способ компенсации эхо-сигналов при дуплексной передаче цифровых сигналов, заключающийся в том, что эхо-сигналы, вызванные цифровыми сигналами передачи, формируемыми передающим блоком передающей ветви дифференциальной системы, в приемном блоке приемной ветви дифференциальной системы вместе с принятыми через дифференциальную систему цифровыми сигналами приема образуют смесь сигналов, из которой вычитают сигналы компенсации,...
Спосіб перетворення сигналів і пристрій для його здійснення
Номер патенту: 25763
Опубліковано: 30.10.1998
Автор: Різник Володимир Васильович
МПК: H03M 7/02
Мітки: спосіб, здійснення, сигналів, перетворення, пристрій
Формула / Реферат:
1. Спосіб перетворення сигналів, який включає в себе підведення вхідних сигналів, вибір початкової комірки кільцевої структури, послідовний обхід комірок сигналом, вибір кінцевої комірки кільцевої структури, на якій закінчують обхід, формування вихідних сигналів з використанням ваг розрядів вихідного коду, який відрізняється тим, що формування вихідних сигналів здійснюють у відповідності з послідовно впорядкованими цілочисловими t-кортежами,...
Попередній патент: Спосіб одержання суспензії, що містить фосфат та суспензія, одержана цим способом
Наступний патент: Перетворювач вологості
Випадковий патент: Пристрій для кріплення запасного колеса