Пристрій для розрахунку необхідної кількості буксирів для гарантованої безпеки маневрування в порту
Номер патенту: 89382
Опубліковано: 25.04.2014
Автори: Мамонтов Володимир Володимирович, Голіков Володимир Володимирович

Формула / Реферат
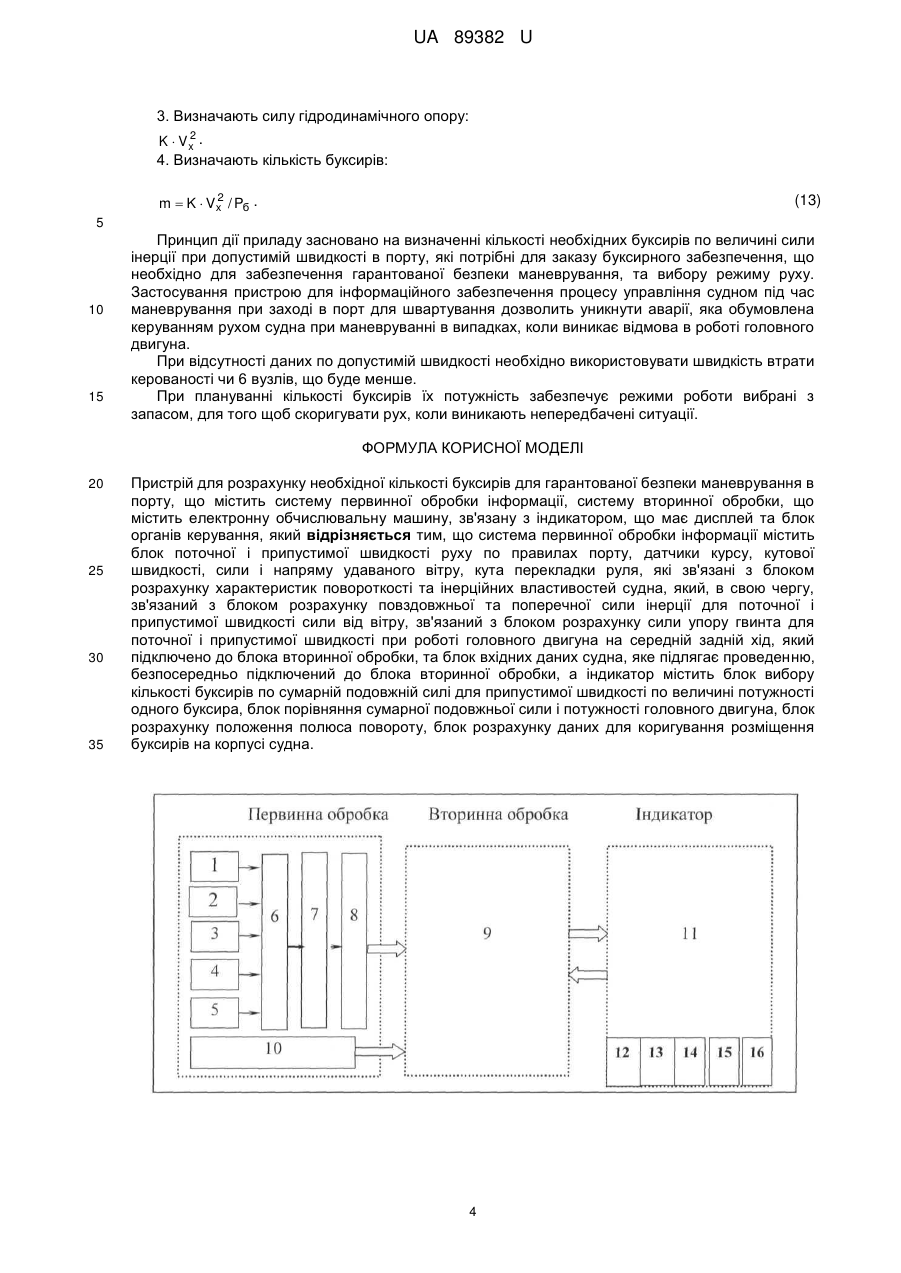
Пристрій для розрахунку необхідної кількості буксирів для гарантованої безпеки маневрування в порту, що містить систему первинної обробки інформації, систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей та блок органів керування, який відрізняється тим, що система первинної обробки інформації містить блок поточної і припустимої швидкості руху по правилах порту, датчики курсу, кутової швидкості, сили і напряму удаваного вітру, кута перекладки руля, які зв'язані з блоком розрахунку характеристик повороткості та інерційних властивостей судна, який, в свою чергу, зв'язаний з блоком розрахунку повздовжньої та поперечної сили інерції для поточної і припустимої швидкості сили від вітру, зв'язаний з блоком розрахунку сили упору гвинта для поточної і припустимої швидкості при роботі головного двигуна на середній задній хід, який підключено до блока вторинної обробки, та блок вхідних даних судна, яке підлягає проведенню, безпосередньо підключений до блока вторинної обробки, а індикатор містить блок вибору кількості буксирів по сумарній подовжній силі для припустимої швидкості по величині потужності одного буксира, блок порівняння сумарної подовжньої сили і потужності головного двигуна, блок розрахунку положення полюса повороту, блок розрахунку даних для коригування розміщення буксирів на корпусі судна.
Текст
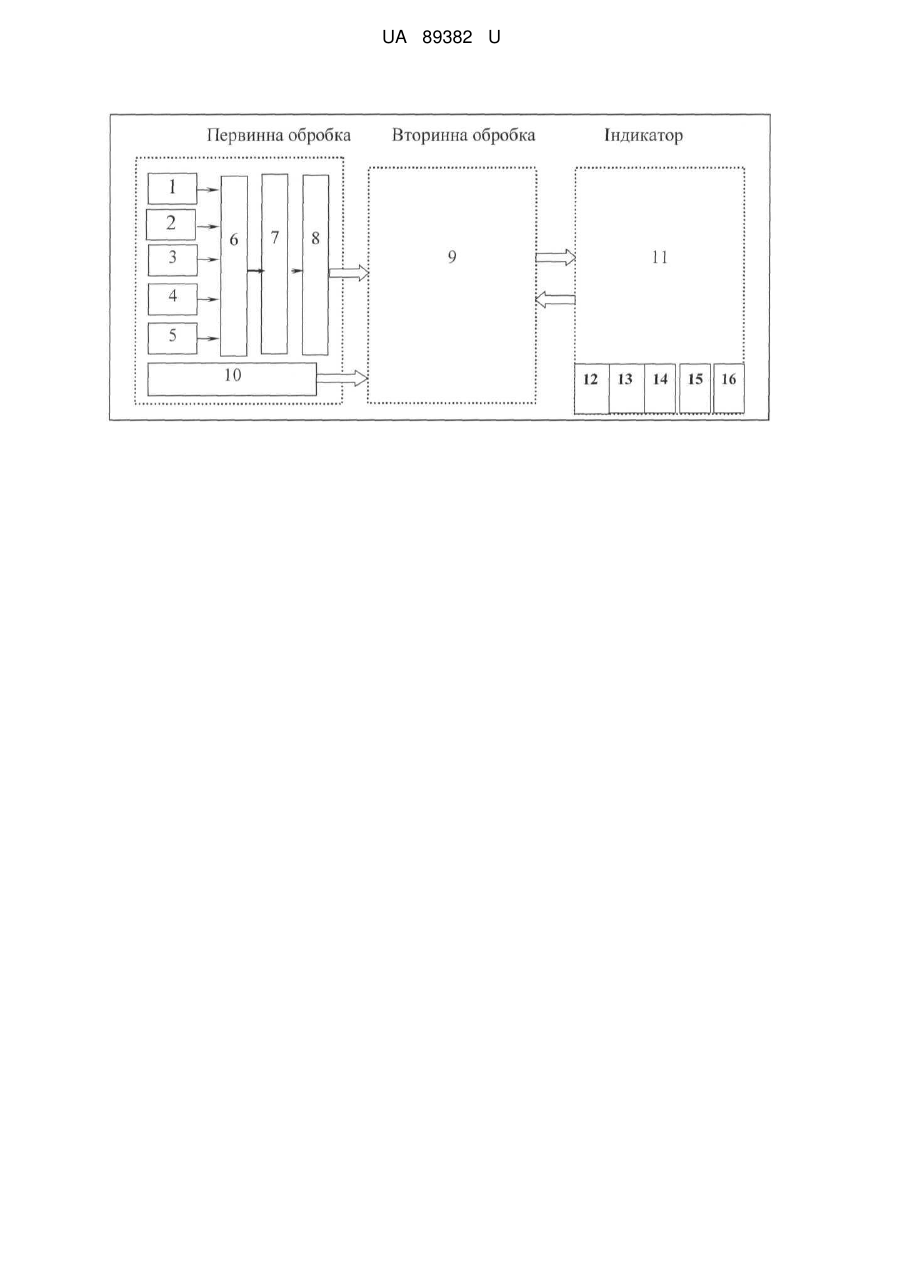
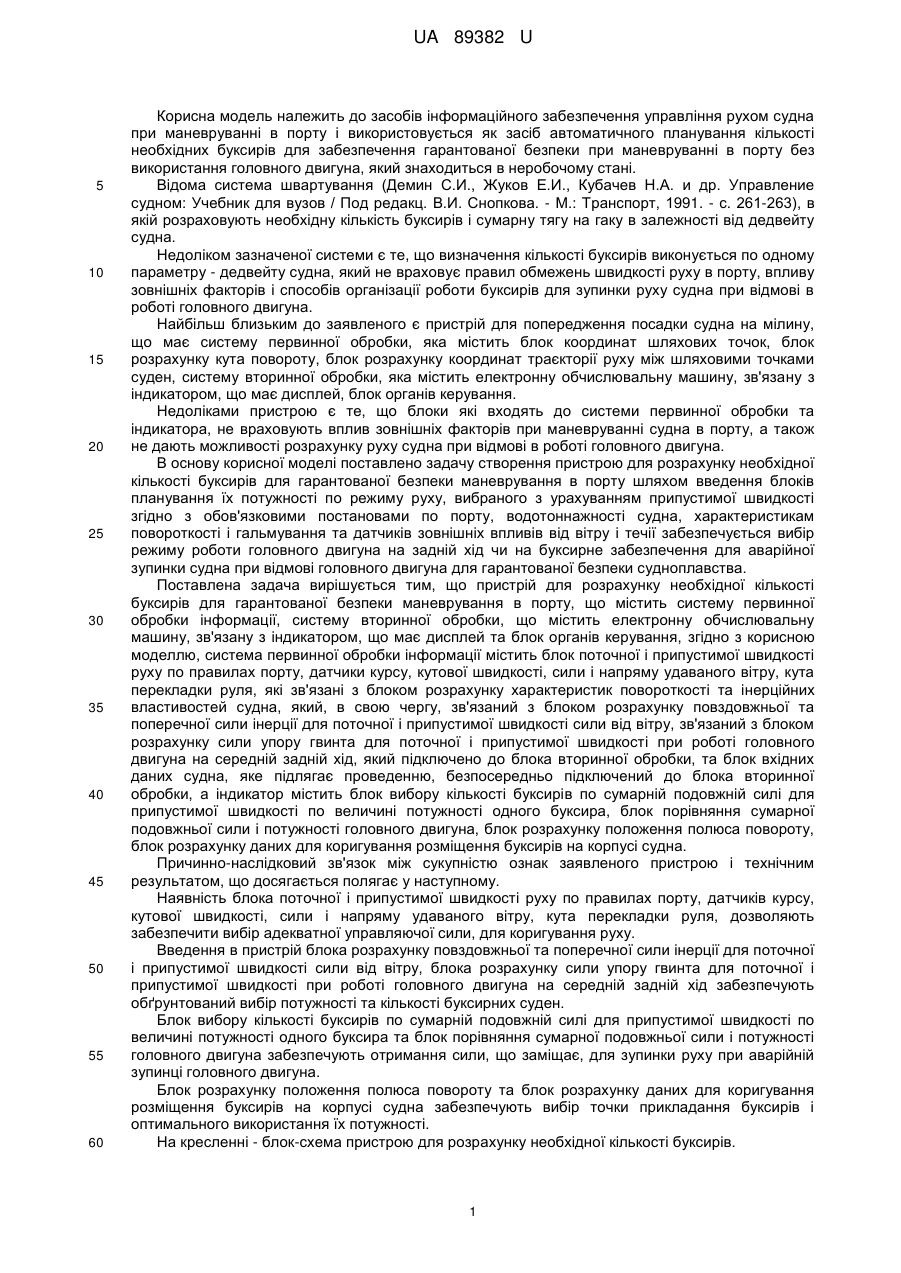
Реферат: Пристрій для розрахунку необхідної кількості буксирів для гарантованої безпеки маневрування в порту містить систему первинної обробки інформації, систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей та блок органів керування. Система первинної обробки інформації містить блок поточної і припустимої швидкості руху по правилах порту, датчики курсу, кутової швидкості, сили і напряму удаваного вітру, кута перекладки руля, які зв'язані з блоком розрахунку характеристик повороткості та інерційних властивостей судна, який, в свою чергу, зв'язаний з блоком розрахунку повздовжньої та поперечної сили інерції для поточної і припустимої швидкості сили від вітру, зв'язаний з блоком розрахунку сили упору гвинта для поточної і припустимої швидкості при роботі головного двигуна на середній задній хід, який підключено до блока вторинної обробки, та блок вхідних даних судна, яке підлягає проведенню, безпосередньо підключений до блока вторинної обробки, а індикатор містить блок вибору кількості буксирів по сумарній подовжній силі для припустимої швидкості по величині потужності одного буксира, блок порівняння сумарної подовжньої сили і потужності головного двигуна, блок розрахунку положення полюса повороту, блок розрахунку даних для коригування розміщення буксирів на корпусі судна. UA 89382 U (12) UA 89382 U UA 89382 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до засобів інформаційного забезпечення управління рухом судна при маневруванні в порту і використовується як засіб автоматичного планування кількості необхідних буксирів для забезпечення гарантованої безпеки при маневруванні в порту без використання головного двигуна, який знаходиться в неробочому стані. Відома система швартування (Демин С.И., Жуков Е.И., Кубачев Н.А. и др. Управление судном: Учебник для вузов / Под редакц. В.И. Снопкова. - М.: Транспорт, 1991. - с. 261-263), в якій розраховують необхідну кількість буксирів і сумарну тягу на гаку в залежності від дедвейту судна. Недоліком зазначеної системи є те, що визначення кількості буксирів виконується по одному параметру - дедвейту судна, який не враховує правил обмежень швидкості руху в порту, впливу зовнішніх факторів і способів організації роботи буксирів для зупинки руху судна при відмові в роботі головного двигуна. Найбільш близьким до заявленого є пристрій для попередження посадки судна на мілину, що має систему первинної обробки, яка містить блок координат шляхових точок, блок розрахунку кута повороту, блок розрахунку координат траєкторії руху між шляховими точками суден, систему вторинної обробки, яка містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок органів керування. Недоліками пристрою є те, що блоки які входять до системи первинної обробки та індикатора, не враховують вплив зовнішніх факторів при маневруванні судна в порту, а також не дають можливості розрахунку руху судна при відмові в роботі головного двигуна. В основу корисної моделі поставлено задачу створення пристрою для розрахунку необхідної кількості буксирів для гарантованої безпеки маневрування в порту шляхом введення блоків планування їх потужності по режиму руху, вибраного з урахуванням припустимої швидкості згідно з обов'язковими постановами по порту, водотоннажності судна, характеристикам повороткості і гальмування та датчиків зовнішніх впливів від вітру і течії забезпечується вибір режиму роботи головного двигуна на задній хід чи на буксирне забезпечення для аварійної зупинки судна при відмові головного двигуна для гарантованої безпеки судноплавства. Поставлена задача вирішується тим, що пристрій для розрахунку необхідної кількості буксирів для гарантованої безпеки маневрування в порту, що містить систему первинної обробки інформації, систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей та блок органів керування, згідно з корисною моделлю, система первинної обробки інформації містить блок поточної і припустимої швидкості руху по правилах порту, датчики курсу, кутової швидкості, сили і напряму удаваного вітру, кута перекладки руля, які зв'язані з блоком розрахунку характеристик повороткості та інерційних властивостей судна, який, в свою чергу, зв'язаний з блоком розрахунку повздовжньої та поперечної сили інерції для поточної і припустимої швидкості сили від вітру, зв'язаний з блоком розрахунку сили упору гвинта для поточної і припустимої швидкості при роботі головного двигуна на середній задній хід, який підключено до блока вторинної обробки, та блок вхідних даних судна, яке підлягає проведенню, безпосередньо підключений до блока вторинної обробки, а індикатор містить блок вибору кількості буксирів по сумарній подовжній силі для припустимої швидкості по величині потужності одного буксира, блок порівняння сумарної подовжньої сили і потужності головного двигуна, блок розрахунку положення полюса повороту, блок розрахунку даних для коригування розміщення буксирів на корпусі судна. Причинно-наслідковий зв'язок між сукупністю ознак заявленого пристрою і технічним результатом, що досягається полягає у наступному. Наявність блока поточної і припустимої швидкості руху по правилах порту, датчиків курсу, кутової швидкості, сили і напряму удаваного вітру, кута перекладки руля, дозволяють забезпечити вибір адекватної управляючої сили, для коригування руху. Введення в пристрій блока розрахунку повздовжньої та поперечної сили інерції для поточної і припустимої швидкості сили від вітру, блока розрахунку сили упору гвинта для поточної і припустимої швидкості при роботі головного двигуна на середній задній хід забезпечують обґрунтований вибір потужності та кількості буксирних суден. Блок вибору кількості буксирів по сумарній подовжній силі для припустимої швидкості по величині потужності одного буксира та блок порівняння сумарної подовжньої сили і потужності головного двигуна забезпечують отримання сили, що заміщає, для зупинки руху при аварійній зупинці головного двигуна. Блок розрахунку положення полюса повороту та блок розрахунку даних для коригування розміщення буксирів на корпусі судна забезпечують вибір точки прикладання буксирів і оптимального використання їх потужності. На кресленні - блок-схема пристрою для розрахунку необхідної кількості буксирів. 1 UA 89382 U 5 10 15 20 25 30 35 Пристрій для розрахунку необхідної кількості буксирів для гарантованої безпеки маневрування в порту має систему первинної обробки, що містить блок поточної і припустимої швидкості руху по правилах порту 1, датчик курсу 2, датчик кутової швидкості 3, датчик сили і напряму удаваного вітру 4, датчик кута перекладки руля 5, які зв'язані з блоком розрахунку характеристик повороткості та інерційних властивостей судна 6, який, в свою чергу, зв'язаний з блоком розрахунку повздовжньої та поперечної сили інерції для поточної і припустимої швидкості сили від вітру 7, зв'язаний з блоком розрахунку сили упору гвинта для поточної і припустимої швидкості при роботі головного двигуна на середній задній хід 8, який підключено до блока вторинної обробки 9 та блок вхідних даних судна 10, яке підлягає проведенню, безпосередньо підключений до блока вторинної обробки 9. Система вторинної обробки 9 містить електронну обчислювальну машину, яка визначає сумарну подовжню силу інерції, вітру, зв'язану з індикатором, що має дисплей 11, блок вибору кількості буксирів по сумарній подовжній силі для припустимої швидкості по величині потужності одного буксира 12, блок порівняння сумарної подовжньої сили і потужності головного двигуна 13, блок розрахунку положення полюса повороту 14, блок розрахунку даних для коригування розміщення буксирів на корпусі судна 15, блок органів керування 16. Пристрій для розрахунку необхідної кількості буксирів для гарантованої безпеки маневрування в порту працює наступним чином. У системі первинної обробки від датчика поточної і припустимої швидкості руху по правилах порту 1, датчика курсу 2, датчика кутової швидкості 3, датчика сили і напряму удаваного вітру 4 інформація надходить в блок розрахунку характеристик повороткості та інерційних властивостей судна 6. При цьому включається гальмівний шлях для режиму допустимої швидкості 6 та блок розрахунку подовжньої сили інерції для поточної і припустимої швидкості сили від вітру 7, значення яких надходять в блок 8 розрахунку сили упору гвинта для поточної і припустимої швидкості при роботі головного двигуна на середній задній хід та обчислювальну машину блока вторинної обробки 9. Обчислювальна машина виконує вибір кількості буксирів по даних блока 12 сумарної подовжньої сили для припустимої швидкості по величині потужності одного буксира, даних порівняння сумарної подовжньої сили і потужності головного двигуна 13, даних розрахунку положення полюса повороту 14 та даних для коригування розміщення буксирів на корпусі судна 15. Указані дані надходять на дисплей 11 для коригування режиму розміщення буксирів та блок органів керування 16 для здійснення руху. Алгоритм розрахунку достатньої кількості буксирів базується на можливості зупинити рух судна по подовжній осі, використовуючи їх сумарну тягу на гаку, яка для гарантованої безпеки маневрування повинна дорівнювати по величині силі упору гвинта. При цій умові указаної сили достатньо для того, щоб при необхідності зупинити боковий зсув. Сила упору гвинта Pe є основною активною рушійною силою судна. Її визначення можна виконати наступним чином. Сила упору ізольованого гвинта на швартовах визначається формулою: 2 n 4 Pщ ‰ К DB , 60 (1) 40 3 де - масова щільність води (1020 кг/м .); n - частота обертання гвинта, об./с; DB - діаметр гвинта, м; K p - коефіцієнт упору гвинта на швартовах, находимо по формулі: K p 3 Z (0,225 sin 2 45 H H , 0.098 sin ) DB DB (2) де - дискове відношення гвинта; z - число лопатей гвинта; H / DB - крокове відношення гвинта, рад. Площа диска гвинта дорівнює: Ad 2 DB . 4 (3) 2 UA 89382 U Для врахування впливу корпусу вводять коефіцієнт підсилення упору гвинта, C y y , який залежить від площі зануреної частини мідель-шпангоута S : S B T , 5 (4) де - коефіцієнт повноти мідель-шпангоута. Тоді ми знаходимо коефіцієнт підсилення упору гвинта: C y y 0,508 0.106 S . Ad (5) Розрахункова максимальна сила упору гвинта на задньому напрямку: 10 pac Pmax Pшв Су у . (6) Номінальну тягу на гаку буксира розраховують по потужності двигуна: Pб 0,133 Pеб , 15 (7) де Pб - тяга на гаку в кН; Pеб - потужність двигуна в кВт. Для того, щоб розробити обґрунтовані рекомендації, по дії судноводіїв при відмові засобів управління, складемо енергетичний баланс керуючих сил. При цьому необхідно складати баланс по осі вздовж ДП, виходячи із рівняння: mx 2 n dV 2 kV x Pe Pяі Pxбб Rв в х , dt і 1 i 1 (8) 20 де Rв в х - сумарна сила від зовнішніх сил по осі X. Для безаварійного управління при відмові головного двигуна сила від буксирів повинна зупинити рух судна при існуючій швидкості. При відсутності зовнішніх впливів, а також рахуючи силу від якоря як допоміжну, необхідну сумарну силу буксирів можна визначити з умови: 25 mx n dV 2 kV x Pxбб . dt i 1 Тоді необхідна сумарна маневрування, становитиме: (9) потужність буксирів, яка необхідна для безаварійного n 2 Pхбі kV x . (10) i 1 30 У цьому зв'язку пропонується використовувати наступний алгоритм вибору буксирної потужності по нормуванню швидкості руху судна при виконанні морських операцій. 1. Розраховують площу змоченої поверхні судна: D2 / 3 (4.854 0.492 B / Tcp ),м2 , (11) 35 де D - водотоннажність, т; B - ширина судна, м; Tcp - середня осадка, м. 2. Розраховують коефіцієнт опору K: K 5880 0654 B / Tcp . (12) 3 UA 89382 U 3. Визначають силу гідродинамічного опору: 2 K Vx . 4. Визначають кількість буксирів: 2 m K Vx / Pб . (13) 5 10 15 Принцип дії приладу засновано на визначенні кількості необхідних буксирів по величині сили інерції при допустимій швидкості в порту, які потрібні для заказу буксирного забезпечення, що необхідно для забезпечення гарантованої безпеки маневрування, та вибору режиму руху. Застосування пристрою для інформаційного забезпечення процесу управління судном під час маневрування при заході в порт для швартування дозволить уникнути аварії, яка обумовлена керуванням рухом судна при маневруванні в випадках, коли виникає відмова в роботі головного двигуна. При відсутності даних по допустимій швидкості необхідно використовувати швидкість втрати керованості чи 6 вузлів, що буде менше. При плануванні кількості буксирів їх потужність забезпечує режими роботи вибрані з запасом, для того щоб скоригувати рух, коли виникають непередбачені ситуації. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 35 Пристрій для розрахунку необхідної кількості буксирів для гарантованої безпеки маневрування в порту, що містить систему первинної обробки інформації, систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей та блок органів керування, який відрізняється тим, що система первинної обробки інформації містить блок поточної і припустимої швидкості руху по правилах порту, датчики курсу, кутової швидкості, сили і напряму удаваного вітру, кута перекладки руля, які зв'язані з блоком розрахунку характеристик повороткості та інерційних властивостей судна, який, в свою чергу, зв'язаний з блоком розрахунку повздовжньої та поперечної сили інерції для поточної і припустимої швидкості сили від вітру, зв'язаний з блоком розрахунку сили упору гвинта для поточної і припустимої швидкості при роботі головного двигуна на середній задній хід, який підключено до блока вторинної обробки, та блок вхідних даних судна, яке підлягає проведенню, безпосередньо підключений до блока вторинної обробки, а індикатор містить блок вибору кількості буксирів по сумарній подовжній силі для припустимої швидкості по величині потужності одного буксира, блок порівняння сумарної подовжньої сили і потужності головного двигуна, блок розрахунку положення полюса повороту, блок розрахунку даних для коригування розміщення буксирів на корпусі судна. 4 UA 89382 U Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюHolikov Volodymyr Voldymyrovych
Автори російськоюГоликов Владимир Владимирович
МПК / Мітки
МПК: G08G 3/00
Мітки: буксирів, гарантованої, необхідної, безпеки, пристрій, розрахунку, маневрування, порту, кількості
Код посилання
<a href="https://ua.patents.su/7-89382-pristrijj-dlya-rozrakhunku-neobkhidno-kilkosti-buksiriv-dlya-garantovano-bezpeki-manevruvannya-v-portu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для розрахунку необхідної кількості буксирів для гарантованої безпеки маневрування в порту</a>
Спосіб підтримання необхідної кількості мережевої води в системі централізованого водяного опалення, спосіб видалення з поверхонь нагрівання системи водяного опалення карбонатних відкладень і пристрій для їхньо
Номер патенту: 86845
Опубліковано: 25.05.2009
Автор: Балюк Йосип Каленикович
Мітки: карбонатних, системі, поверхонь, видалення, мережевої, кількості, нагрівання, води, їхньої, необхідної, пристрій, централізованого, опалення, підтримання, спосіб, водяного, відкладень
Формула / Реферат:
1. Спосіб підтримання необхідної кількості мережевої води в системі централізованого водяного опалення, який включає контролювання необхідної кількості води за рахунок вимірювання рівня води в розширювальному баку з подальшим його поповненням додатковою водою за рахунок додаткових джерел, попередньо провівши підготовку додаткової води, який відрізняється тим, що додаткову воду одержують з димових газів, що відходять від генератора тепла в...
Спосіб визначення необхідної кількості кістковопластичного матеріалу для проведення реконструкції атрофованих ділянок альвеолярних гребенів щелеп на ділянці адентії
Номер патенту: 43803
Опубліковано: 25.08.2009
Автори: Карий Володимир Іванович, Сенніков Олег Миколаєвич, Прийма Андрій Олександрович, Новицький Володимир Борисович
МПК: G09B 23/28
Мітки: адентії, проведення, ділянці, реконструкції, матеріалу, кістковопластичного, кількості, ділянок, щелеп, необхідної, атрофованих, альвеолярних, спосіб, визначення, гребенів
Формула / Реферат:
Спосіб визначення необхідної кількості кістковопластичного матеріалу для проведення реконструкції атрофованих ділянок альвеолярних гребенів щелеп на ділянці адентії, за яким пацієнту знімають відбиток з досліджуваної щелепи, відливають модель і після кристалізації гіпсу на ділянку адентії наносять пластичний матеріал і моделюють відсутню частину альвеолярного гребеня у відповідності до анатомічної, після чого отриману композицію неправильної...
Спосіб нейро-нечіткого управління пакетною чергою вихідного порту маршрутизатора телекомунікаційної мережі
Номер патенту: 72989
Опубліковано: 10.09.2012
Автори: Стрюк Олексій Юрійович, Здоренко Юрій Миколайович, Шкіцькій Володимир Володимирович, Польщиков Костянтин Олександрович
МПК: H04Q 9/00
Мітки: вихідного, мережі, нейро-нечіткого, спосіб, телекомунікаційної, порту, пакетною, чергою, маршрутизатора, управління
Формула / Реферат:
Спосіб нейро-нечіткого управління пакетною чергою вихідного порту маршрутизатора телекомунікаційної мережі полягає у тому, що протягом кожної ділянки часу встановленої тривалості здійснюється підрахунок кількості пакетів, що надходять до вихідного порту маршрутизатора для подальшого передавання, підраховані значення кількості пакетів, що надійшли до вихідного порту маршрутизатора протягом чотирьох попередніх ділянок часу, як вхідні величини...
Спосіб розрахунку коливальної потужності асинхронного двигуна
Номер патенту: 88490
Опубліковано: 25.03.2014
Автори: Калінов Андрій Петрович, Носов Дмитро Олексійович, Браташ Оксана Вікторівна
МПК: G06F 17/14
Мітки: двигуна, асинхронного, розрахунку, коливальної, спосіб, потужності
Формула / Реферат:
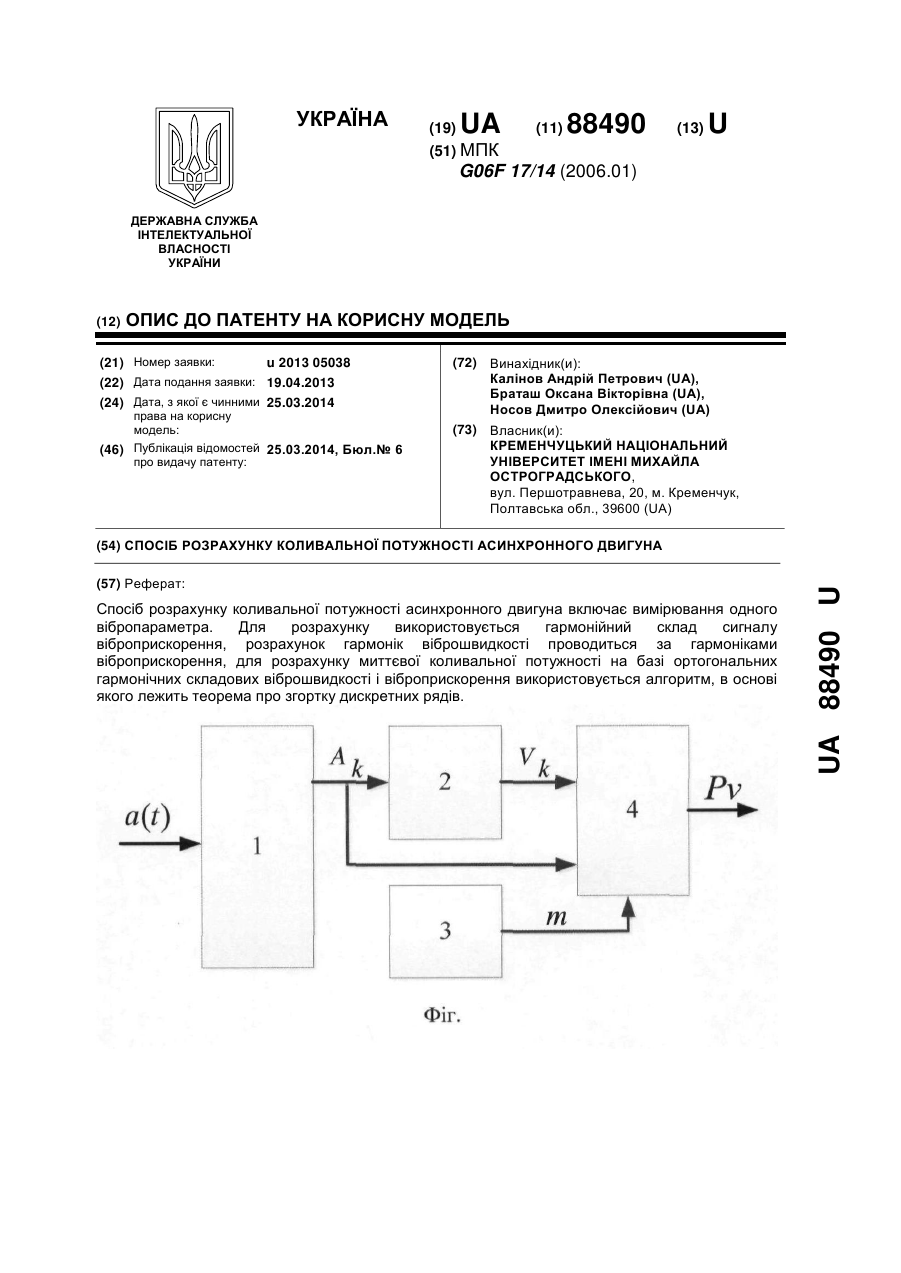
Спосіб розрахунку коливальної потужності асинхронного двигуна, який полягає в тому, що при роботі асинхронного двигуна здійснюється вимірювання одного вібропараметра, який відрізняється тим, що для розрахунку використовується гармонійний склад сигналу віброприскорення, розрахунок гармонік віброшвидкості проводиться за гармоніками віброприскорення, для розрахунку миттєвої коливальної потужності на базі ортогональних гармонічних складових...
Спосіб формування стабільного порту для динамічних санаційних лапароскопій черевної порожнини

Номер патенту: 50111
Опубліковано: 25.05.2010
Автори: Шейко Володимир Дмитрович, Ситнік Дмитро Анатолійович
МПК: A61B 17/00
Мітки: санаційних, порожнини, стабільного, лапароскопій, формування, порту, черевної, спосіб, динамічних
Формула / Реферат:
Спосіб формування стабільного порту для динамічних санаційних лапароскопій черевної порожнини, що включає первинну санацію та дренування черевної порожнини серединним лапаротомним доступом, під час якого створюється канал для подальших програмованих лапароскопічних санацій, який відрізняється тим, що в післяопераційній рані не залишається гільза-порт, а канал формується зліва або справа від пупка (контрлатерально від зони санації) по...
Попередній патент: Спосіб прогнозування продуктивності врх на ранніх стадіях онтогенезу за типами дерматогліфів носо-губного дзеркала
Наступний патент: Сорбет “каротиновий” з використанням рослинної сировини та електроактивованої води
Випадковий патент: Пристрій для підпалювання