Спосіб формування керуючого сигналу на реактивні двигуни орієнтації літального апарата при його просторовій переорієнтації
Формула / Реферат
Спосіб формування керуючого сигналу на реактивні двигуни орієнтації літального апарата (ЛА) при його просторовій переорієнтації, що включає вимірювання поточної орієнтації і кутової швидкості в проекціях на зв'язані осі літального апарата, визначення відхилень обмірюваних кутових параметрів від програмних, формування сигналу керування по відхиленнях шляхом додавання кутових відхилень і складових кутової швидкості обертання, узятих з відповідними коефіцієнтами пропорційності, і вироблення керуючого сигналу по відхиленнях на включення реактивних двигунів щодо зв'язаних осей літального апарата, якщо сигнал керування перевищує граничне значення, який відрізняється тим, що додатково обчислюють програмну кутову швидкість розвороту ЛА по куту неузгодженості і часу розвороту, на кожному такті обчислюють програмне кутове прискорення і за обчисленим значенням програмної кутової швидкості розвороту і програмного кутового прискорення формують поточний програмний момент, а також розраховують максимальний момент у кожному каналі стабілізації при включенні відповідних двигунів на один такт, формують керуючий сигнал по збурюваннях за величиною відношення програмного моменту до максимального і формують результуючий керуючий сигнал включення реактивних двигунів шляхом логічного підсумовування сигналів, вироблених по відхиленнях і по збурюваннях.
Текст
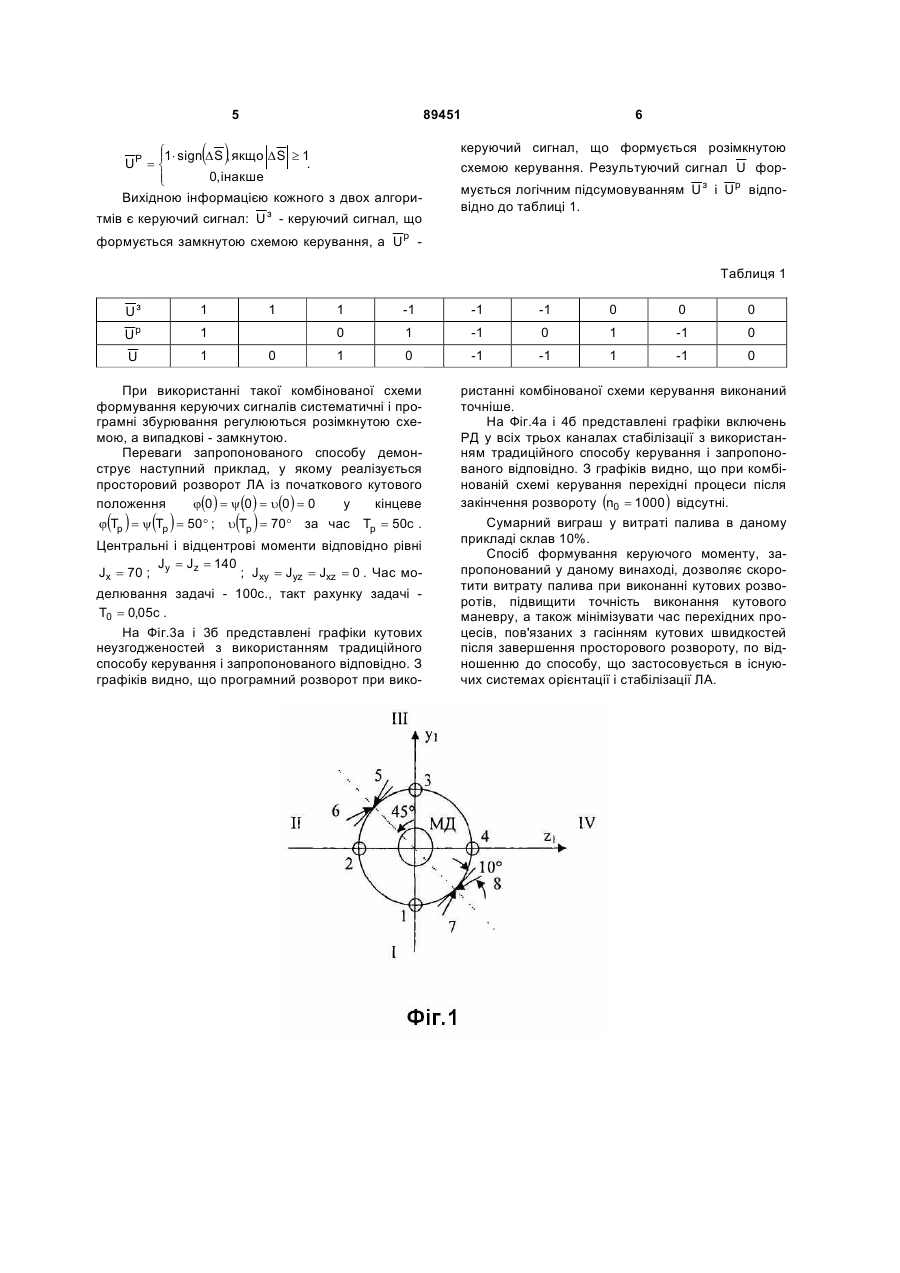
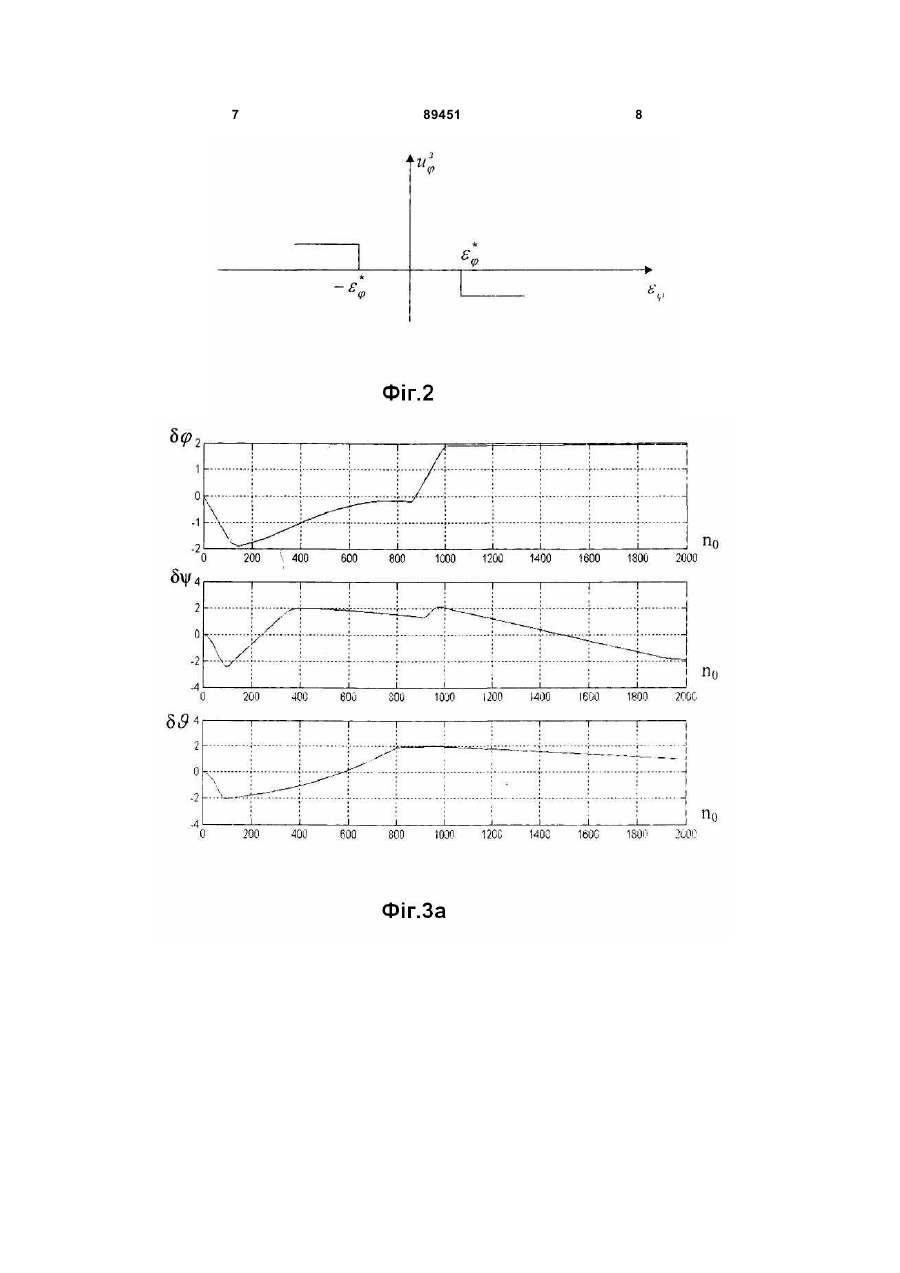
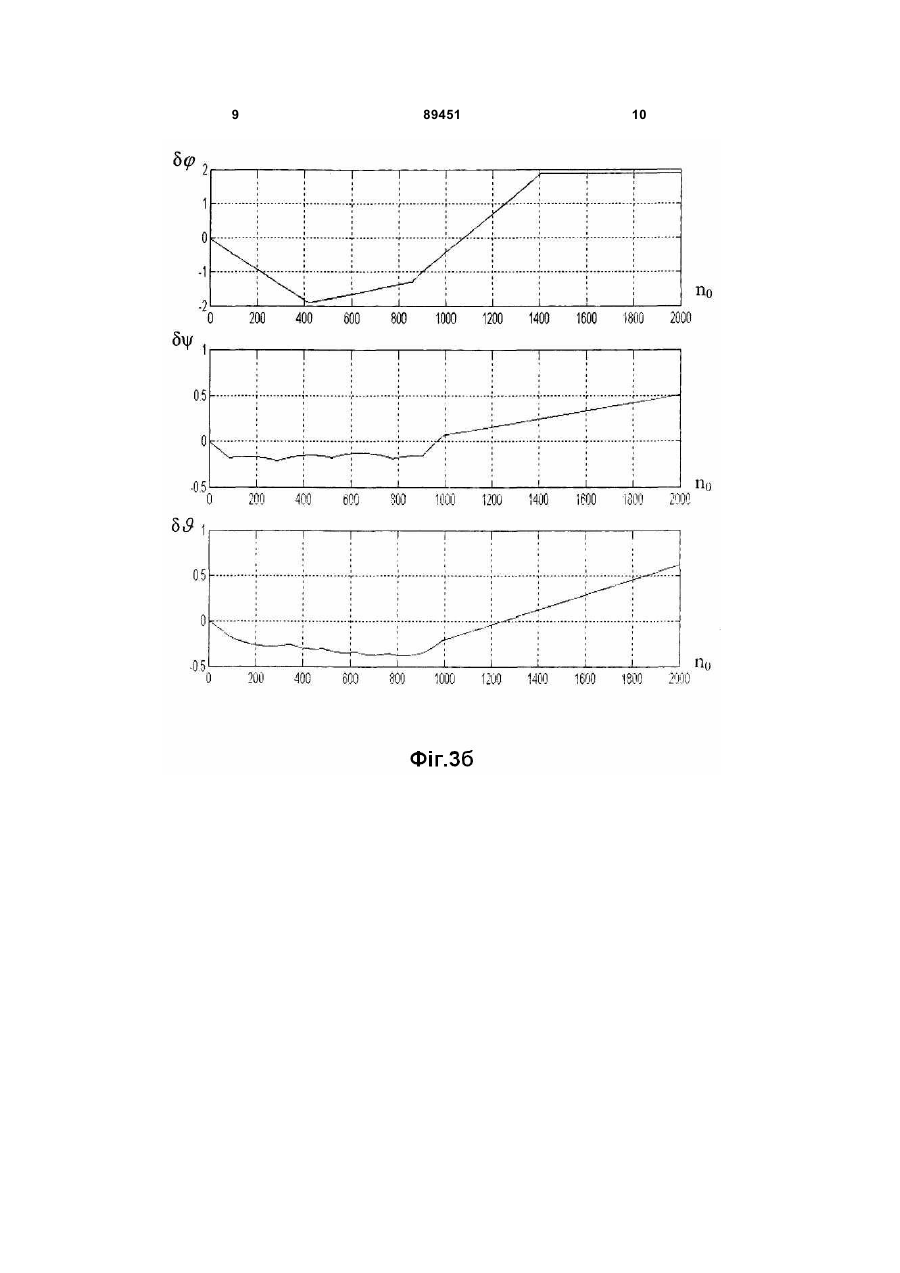
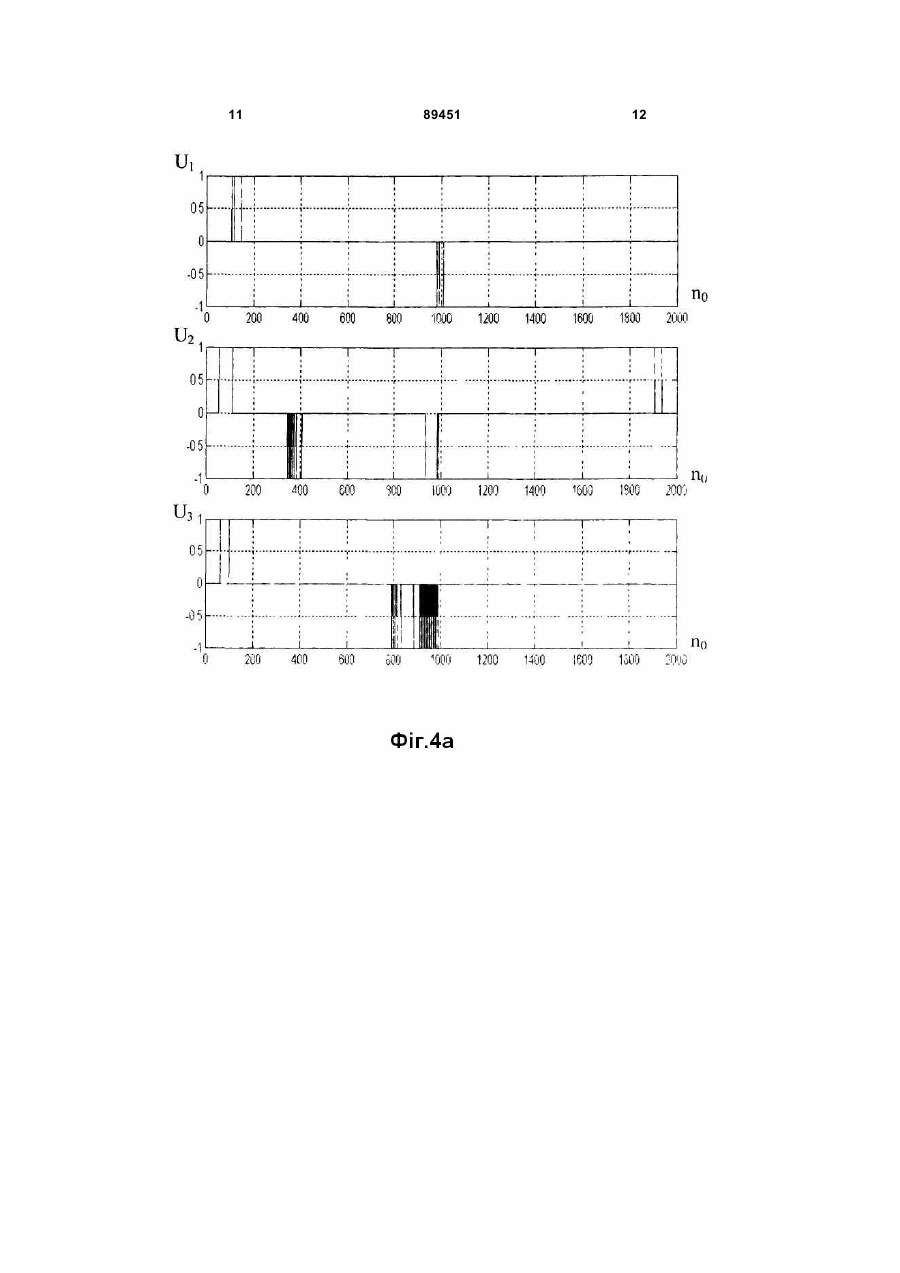
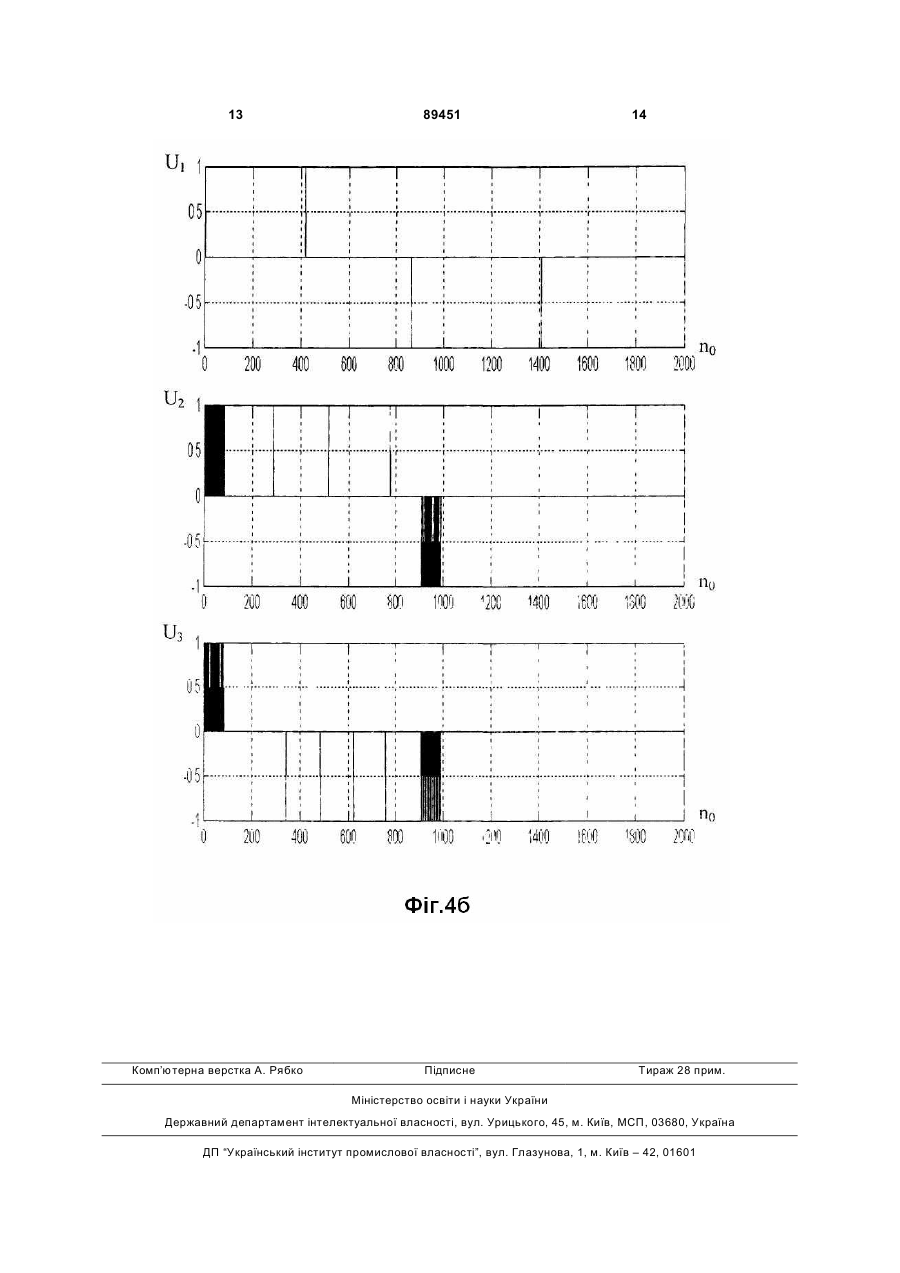
Спосіб формування керуючого сигналу на реактивні двигуни орієнтації літального апарата (ЛА) при його просторовій переорієнтації, що включає вимірювання поточної орієнтації і кутової швидкості в проекціях на зв'язані осі літального апарата, визначення відхилень обмірюваних кутових параметрів від програмних, формування сигналу керування по відхиленнях шляхом додавання кутових відхилень і складових кутової швидкості C2 1 3 1974, с.196, см. Кузовков Н.Т. "Системы стабилизации летательных аппаратов (баллистических и зенитных ракет)" М, "Высшая школа", 1976, с.188). Недоліком цього способу с невисока точність виконання переорієнтації, велика витрата робочого тіла, а також необхідність тривалого часу заспокоєння об'єкта керування після закінчення кутового маневру, пов'язаного з гасінням кутових швидкостей, обумовлених збурюваннями через несиметрію літального апарата. Причому, чим більше несиметрія ЛА, тим сильніше виявляються перераховані вище недоліки. Метою пропонованого винаходу є підвищення точності переорієнтації, зменшення витрати робочого тіла і зменшення часу заспокоєння після розвороту за рахунок обрахування програмних збурювань, обумовлених несиметрією виробу. Поставлена мета досягається тим, що в способі, що включає вимірювання поточної орієнтації і кутової швидкості в проекціях на зв'язані осі літального апарата, визначення відхилень обмірюваних кутових параметрів від програмних, формування сигналу керування по відхиленнях шляхом додавання кутових відхилень і складових кутової швидкості обертання, узятих з відповідними коефіцієнтами пропорційності, вироблення керуючого сигналу по відхиленнях на включення реактивних двигунів відносно зв'язаних осей літального апарата, якщо сигнал керування перевищує граничне значення, додатково обчислюється програмна кутова швидкість розвороту ЛА по куту неузгодженості і часу розвороту, на кожному такті обчислюється програмне кутове прискорення по зміні програмної кутової швидкості за такт часу, потім за обчисленим значенням програмної кутової швидкості розвороту і програмного кутового прискорення формується поточний програмний момент, розраховується максимальний момент у кожному каналі стабілізації при включенні відповідних двигунів на один такт, формується керуючий сигнал по збурюваннях по величині відношення програмного моменту до максимального, формується результуючий керуючий сигнал включення реактивних двигунів шляхом логічного підсумовування сигналів, вироблених по відхиленнях і по збурюваннях. Нижче приведено математичне обґрунтування працездатності запропонованого способу. Існуючий спосіб формування керування по відхиленнях (або замкнута схема регулювання) відомий як пропорційно-диференціальний закон керування (запишемо для одного каналу - обертання): & e j = k j × dj + k j × dj, & де k j, k j - коефіцієнти пропорційності; dj & & відхилення по кутовій координаті; dj - відхилення по кутовій швидкості. Керуючий сигнал замкнутою схемою реалізується наступним алгоритмом (Фіг.2): ì1 якщо ej e* j ï 0, інакше. ï î 89451 4 В основу винаходу поставлена задача удосконалення способу формування керування на РД шляхом додавання розімкнутої схеми регулювання (або регулювання по збурюваннях). Формування керуючого сигналу за розімкнутою схемою реалізується наступною послідовністю дій. 1. Розраховується програмний момент: & М = J wnp + wnp ´ J wnp , np & де wnp , wnp - програмне кутове прискорення і програмна кутова швидкість ЛА у проекціях на зв'язані осі, задаються як функції часу відповідно до обраної моделі програмного руху; J - тензор інерції. Програмний рух може формуватися не єдиним способом. Вибір тієї чи іншої моделі програмного руху може залежати від крайових умов задачі переорієнтації, вимог по точності, швидкодії, що пред'являються до ЛА, його динамічних характеристик (керуючих моментів, тензора інерції), обмежень на величини керуючих моментів або кутових швидкостей. Наприклад, початкова орієнтація ЛА задана кватерніоном Lн ; кінцева орієнтація задана ква терніоном Lк , час розвороту об'єкта керування Тр. Обчислюється постійна функція: L - Lн & Lnp [n0T0 ] = к , (1) Тр де Т0 - такт рахунку алгоритмів, n0 - лічильник тактів. Програмний кватерніон орієнтації визначається інтегруванням функції (1) методом прямокутників: & Lnp [n0T0 ] = Lnp [(n0 - 1)T0 ] + Lnp [n0T0 ]× T0 . Далі, визначаємо програмну кутову швидкість по формулі: ~ & wnp [n0T0 ] = 2L np [n0T0 ] o Lnp [n0T0 ], (2) де знак "~" означає, що кватерніон сполучений, а знак "◦" означає кватернионне множення. Тоді програмне кутове прискорення можна визначити чисельним диференціюванням функції (2): wnp [n0T0 ] - wnp [(n0 - 1)T0 ] & wnp [n0T0 ] = . T0 Надалі будемо опускати функціональну залежність програмних функцій від часу. 2. Розраховується на кожному такті відношення програмного моменту Mпp і розрахункового керуючого моменту Mp , який створюється РД при включенні на один такт: Mпp N= ; (N
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of forming drive signal for jet engines of orientation of aircraft during its three-dimensional reorientation
Автори англійськоюRiumin Maksym Mykolaiovych
Назва патенту російськоюСпособ формирования управляющего сигнала на реактивные двигатели ориентации летательного аппарата при его пространственной переориентации
Автори російськоюРюмин Максим Николаевич
МПК / Мітки
МПК: B64G 1/26
Мітки: переорієнтації, сигналу, двигуні, апарата, керуючого, формування, реактивні, спосіб, просторовий, літального, орієнтації
Код посилання
<a href="https://ua.patents.su/7-89451-sposib-formuvannya-keruyuchogo-signalu-na-reaktivni-dviguni-oriehntaci-litalnogo-aparata-pri-jjogo-prostorovijj-pereoriehntaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб формування керуючого сигналу на реактивні двигуни орієнтації літального апарата при його просторовій переорієнтації</a>
Спосіб гасіння початкової кутової швидкості космічного літального апарата

Номер патенту: 46217
Опубліковано: 10.12.2009
Автори: Ковальчук Михайло Юрійович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: кутової, спосіб, космічного, апарата, швидкості, гасіння, початкової, літального
Формула / Реферат:
Спосіб гасіння початкової кутової швидкості космічного літального апарата, що полягає в тому, що вимірюють початкову кутову швидкість космічного літального апарату, формують керуючий сигнал, створюють керуючий момент за допомогою релейних виконавчих органів і вимикають керуючий сигнал, коли кутова швидкість приймає задане значення, який відрізняється тим, що після вимірювання початкової кутової швидкості знаходять величину імпульсу післядії...
Спосіб формування керуючого моменту для космічного апарата
Номер патенту: 65322
Опубліковано: 15.03.2004
Автори: Кузякін Юрій Петрович, ТРОНЬ ЮРІЙ ОПАНАСОВИЧ
МПК: B64G 1/28
Мітки: спосіб, формування, космічного, апарата, моменту, керуючого
Формула / Реферат:
Спосіб формування керуючого моменту для космічного апарата шляхом використання кінетичного моменту, що створюється двигуном-маховиком, який відрізняється тим, що вимірюють кутову швидкість першого електроприводу, отримане значення масштабують, алгебраїчно сумують з сигналом завдання та формують сигнал управління другим електроприводом пропорційно отриманій різниці, вимірюють сигнал другого електроприводу, отримане значення масштабують та...
Система гасіння початкової кутової швидкості космічного літального апарата
Номер патенту: 45064
Опубліковано: 26.10.2009
Автори: Педе Тетяна Юріївна, Кулік Анатолій Степанович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: кутової, система, гасіння, апарата, початкової, швидкості, космічного, літального
Формула / Реферат:
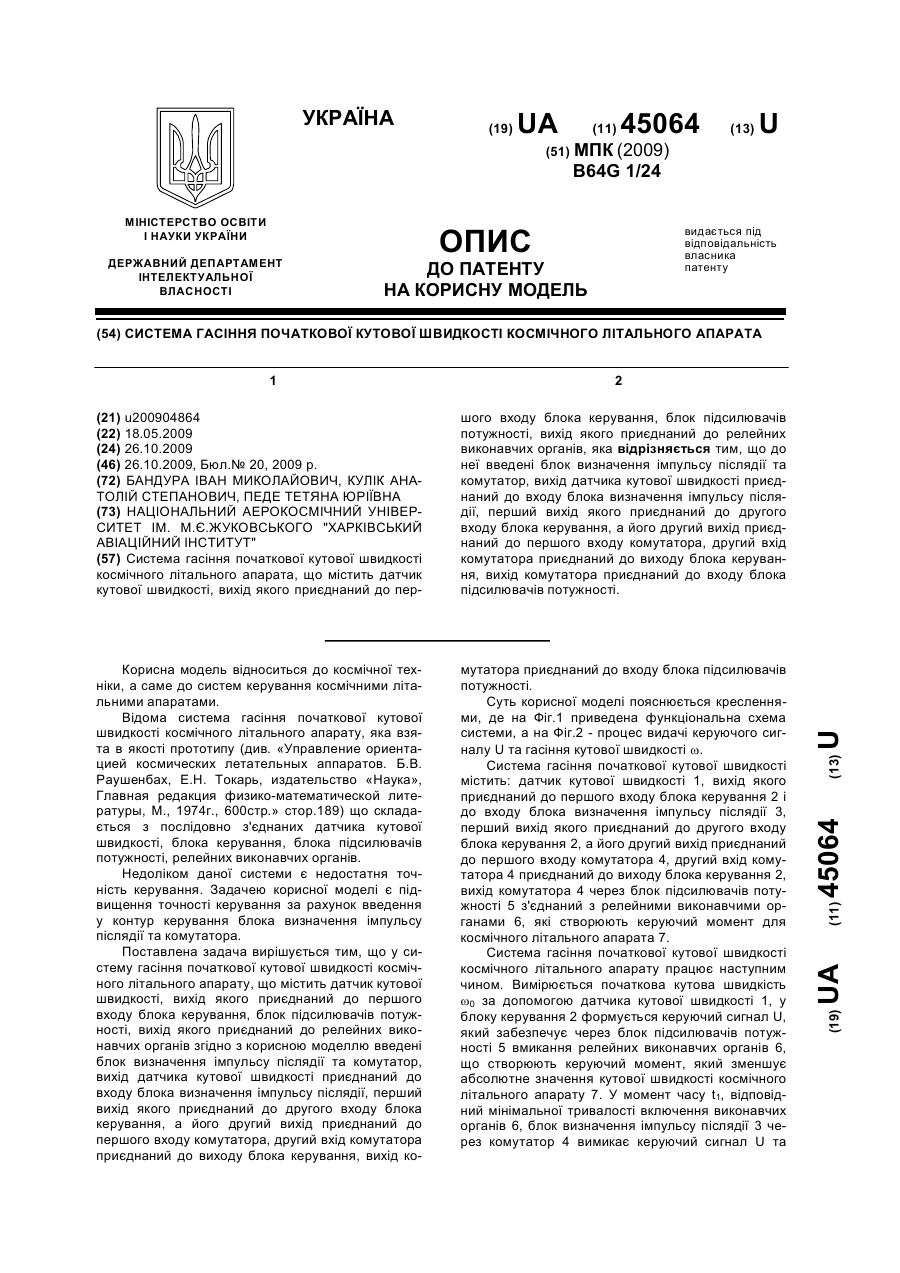
Система гасіння початкової кутової швидкості космічного літального апарата, що містить датчик кутової швидкості, вихід якого приєднаний до першого входу блока керування, блок підсилювачів потужності, вихід якого приєднаний до релейних виконавчих органів, яка відрізняється тим, що до неї введені блок визначення імпульсу післядії та комутатор, вихід датчика кутової швидкості приєднаний до входу блока визначення імпульсу післядії, перший вихід...
Спосіб формування сигналів одноканального керування літального апарата, що обертається за креном
Номер патенту: 83707
Опубліковано: 11.08.2008
Автори: Смішко Григорій Павлович, Коростельов Олег Петрович, Клявлін Валерій Володимирович, Кузьмін В'ячеслав Павлович, Косовенко Євген Вікторович
МПК: F42B 15/01, F42B 15/00
Мітки: спосіб, сигналів, формування, обертається, креном, одноканального, апарата, літального, керування
Формула / Реферат:
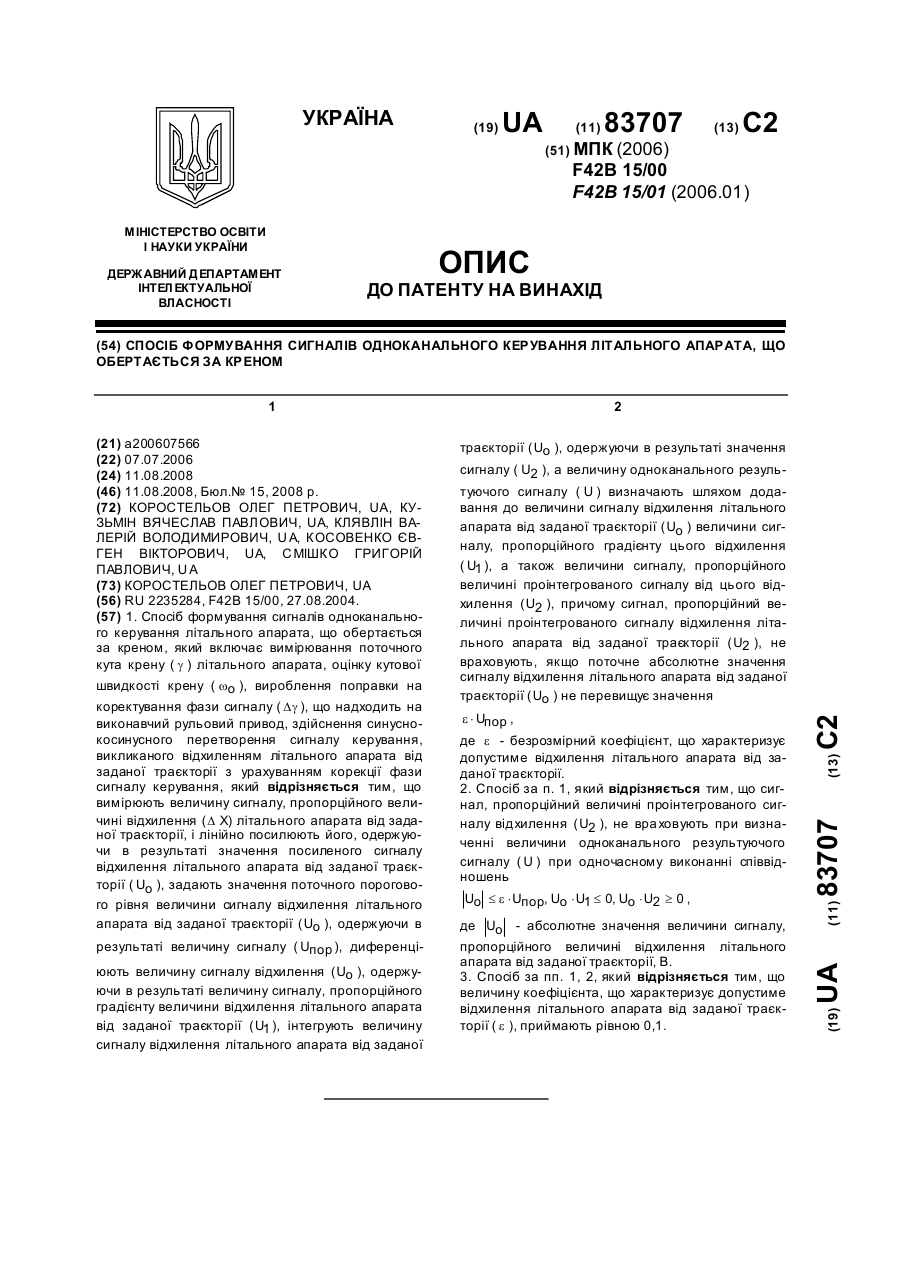
1. Спосіб формування сигналів одноканального керування літального апарата, що обертається за креном, який включає вимірювання поточного кута крену () літального апарата, оцінку кутової швидкості крену (), вироблення поправки на коректування фази сигналу (
Спосіб формування сигналів одноканального керування літального апарата, що обертається за креном
Номер патенту: 19562
Опубліковано: 15.12.2006
Автори: Клявлін Валерій Володимирович, Коростельов Олег Петрович, Смішко Григорій Павлович, Косовенко Євген Вікторович, Кузьмін В'ячеслав Павлович
МПК: F42B 15/01, F42B 15/00
Мітки: одноканального, апарата, літального, сигналів, формування, керування, спосіб, обертається, креном
Формула / Реферат:
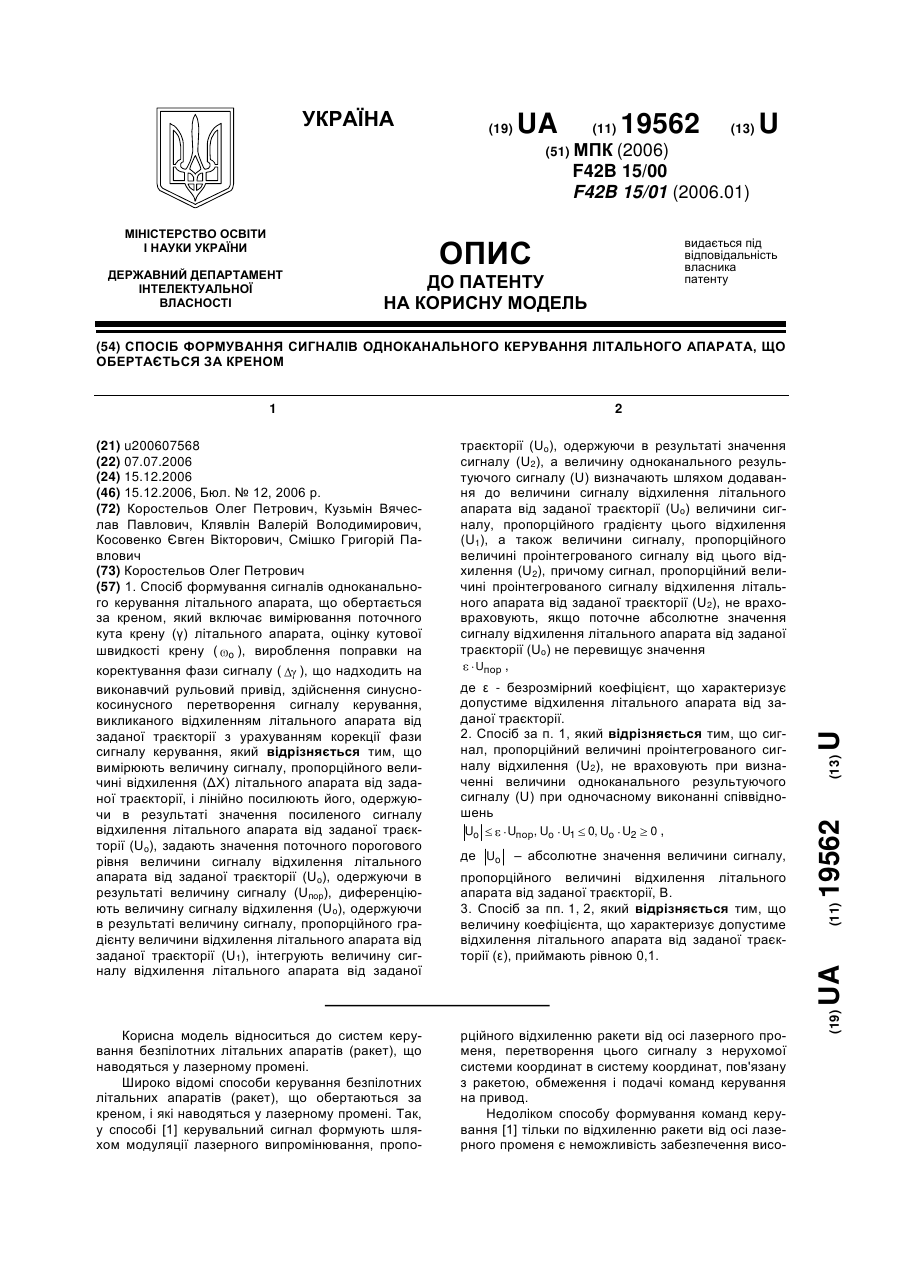
1. Спосіб формування сигналів одноканального керування літального апарата, що обертається за креном, який включає вимірювання поточного кута крену (γ) літального апарата, оцінку кутової швидкості крену (), вироблення поправки на коректування фази сигналу (), що надходить на виконавчий рульовий привід,...
Попередній патент: Напрямний апарат гідромашини
Наступний патент: Установка перетворення енергії потоку середовища
Випадковий патент: Спосіб підготовки зелених овочів до зберігання