Ітераційний спосіб пошуку постраждалих під завалами
Номер патенту: 90072
Опубліковано: 25.03.2010
Автори: Дурманов Максим Анатолійович, Широков Ігор Борисович
Формула / Реферат
Ітераційний спосіб пошуку постраждалих під завалами, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній близькості від передбачуваного об'єкта пошуку, при цьому змінне магнітне поле з частотою f1 уловлюють другою нерухомою котушкою з феромагнітним сердечником, яку встановлюють в радіомаяку об'єкта пошуку, після чого сигнал, що знімається з клем другої котушки з феромагнітним сердечником, підсилюють у вузькій смузі частот, випрямляють і оцінюють його рівень, причому при перевищенні випрямленого сигналу постійного струму деякого порогового рівня починають генерувати безперервні низькочастотні коливання з частотою f2, які подають на клеми третьої нерухомої котушки з феромагнітним сердечником, яку також розташовують в радіомаяку об'єкта пошуку, і випромінюють тим самим змінне магнітне поле з частотою f2, при цьому змінне магнітне поле з частотою f2 уловлюють четвертою рухливою котушкою з феромагнітним сердечником, яку розташовують в першому пошуковому пристрої, причому це ж змінне магнітне поле з частотою f2 уловлюють п'ятою рухливою котушкою з феромагнітним сердечником, яку розташовують в другому пошуковому пристрої, причому це ж змінне магнітне поле з частотою f2 уловлюють шостою рухливою котушкою з феромагнітним сердечником, яку розташовують в третьому пошуковому пристрої, причому самі пошукові пристрої розташовують один відносно одного на деякій відомій відстані, причому пошукові пристрої розташовують не на одній лінії, при цьому в кожному з трьох пошукових пристроїв проводять вузькосмугове підсилення і випрямлення низькочастотних сигналів, що приймаються рухливими котушками, причому в кожному з трьох пошукових пристроїв випрямлений сигнал постійного струму подають на вимірювачі рівня сигналу, при цьому в кожному з трьох пошукових пристроїв обертають рухливі котушки з феромагнітними сердечниками: у першому пошуковому пристрої - четверту котушку, в другому - п'яту, в третьому - шосту, при цьому в кожному з трьох пошукових пристроїв здійснюють вимірювання рівня прийнятого, підсиленого і випрямленого низькочастотного сигналу, при цьому добиваються появи в кожному з трьох пошукових пристроїв максимального рівня виміряного сигналу, після чого в кожному з трьох пошукових пристроїв ці виміряні рівні сигналів по калібрувальних номограмах переводять у відстані до об'єкта пошуку R1, R2, R3, які відповідають співвісному орієнтуванню кожної з трьох котушок пошукових пристроїв відносно нерухомої котушки радіомаяка, при цьому вважають, що знайдені три відстані відповідають максимальному значенню нормувального коефіцієнта К, що відповідає співвісному розташуванню котушок радіомаяка і котушок пошукових пристроїв, при цьому вимірником кута повороту визначають кути повороту осей котушок пошукових пристроїв відносно відомого напрямку, наприклад напрямку на Північ магнітного поля Землі, потім по знайдених відстанях R1, R2, R3 обчислюють азимути об'єкта пошуку щодо відомого напрямку, наприклад напрямку на Північ магнітного поля Землі, після чого для кожного з пошукових пристроїв знаходять кут між цим обчисленим азимутом і зміряним азимутом положення осей котушок відносно відомого напрямку, наприклад на Північ магнітного поля Землі, при цьому цей знайдений кут для кожного з пошукових пристроїв відповідає куту відхилення осі котушки пошукового пристрою від уявної лінії, що сполучає пошуковий пристрій і радіомаяк, тобто відповідає куту відхилення осей котушок радіомаяка і пошукового пристрою від співвісного напрямку, при цьому по відомій залежності знаходять значення нормувального коефіцієнта K', відповідного цьому куту, причому таку операцію проводять для всіх трьох пошукових пристроїв, після чого коректують значення відстаней від пошукових пристроїв до об'єкта пошуку відповідно до коефіцієнта К і отримують нові уточнені відстані R1', R2', R3', після чого обчислюють уточнені азимути об'єкта пошуку відносно кожного з пошукових пристроїв, після чого знаходять кут між цим уточненим азимутом і раніше виміряним азимутом положення осей котушок пошукових пристроїв відносно відомого напрямку, наприклад на Північ магнітного поля Землі, і по відомій залежності знаходять значення нормувального коефіцієнта К", відповідного цьому куту, і далі знов коректують відстань до об'єкта пошуку, при цьому проводять такі ітерації доти, поки зміна відстаней і кутів при черговій ітерації не стане менше заданої точності вимірювання дальності і азимута при здійсненні пошуку постраждалих під завалом, після чого від кожного з пошукових пристроїв отримують азимут об'єкта пошуку, при цьому використовують один з отриманих азимутів і одну відстань до об'єкта пошуку для здійснення рятувальних заходів від того пошукового пристрою, від якого вживати рятувальні заходи найефективніше.
Текст
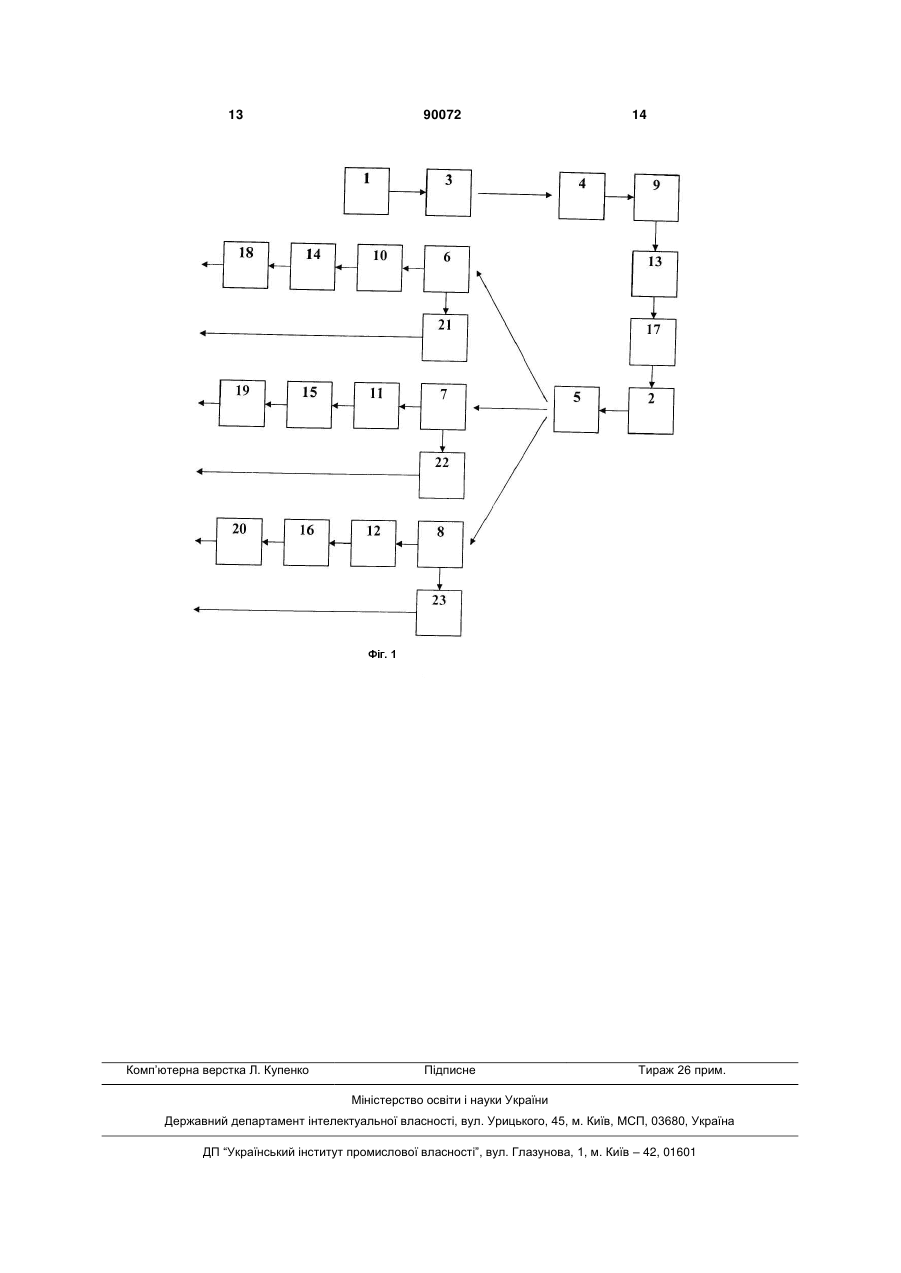
Ітераційний спосіб пошуку постраждалих під завалами, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній близькості від передбачуваного об'єкта пошуку, при цьому змінне магнітне поле з частотою f1 уловлюють другою нерухомою котушкою з феромагнітним сердечником, яку встановлюють в радіомаяку об'єкта пошуку, після чого сигнал, що знімається з клем другої котушки з феромагнітним сердечником, підсилюють у вузькій смузі частот, випрямляють і оцінюють його рівень, причому при перевищенні випрямленого сигналу постійного струму деякого порогового рівня починають генерувати безперервні низькочастотні коливання з частотою f2, які подають на клеми третьої нерухомої котушки з феромагнітним сердечником, яку також розташовують в радіомаяку об'єкта пошуку, і випромінюють тим самим змінне магнітне поле з частотою f2, при цьому змінне магнітне поле з частотою f2 уловлюють четвертою рухливою котушкою з феромагнітним сердечником, яку розташовують в першому пошуковому пристрої, причому це ж змінне магнітне поле з частотою f2 уловлюють п'ятою рухливою котушкою з феромагнітним сердечником, яку розташовують в другому пошуковому пристрої, причому це ж змінне магнітне поле з 2 (19) 1 3 90072 4 пошуковий пристрій і радіомаяк, тобто відповідає куту відхилення осей котушок радіомаяка і пошукового пристрою від співвісного напрямку, при цьому по відомій залежності знаходять значення нормувального коефіцієнта K', відповідного цьому куту, причому таку операцію проводять для всіх трьох пошукових пристроїв, після чого коректують значення відстаней від пошукових пристроїв до об'єкта пошуку відповідно до коефіцієнта К і отримують нові уточнені відстані R1', R2', R3', після чого обчислюють уточнені азимути об'єкта пошуку відносно кожного з пошукових пристроїв, після чого знаходять кут між цим уточненим азимутом і раніше виміряним азимутом положення осей котушок пошукових пристроїв відносно відомого на прямку, наприклад на Північ магнітного поля Землі, і по відомій залежності знаходять значення нормувального коефіцієнта К", відповідного цьому куту, і далі знов коректують відстань до об'єкта пошуку, при цьому проводять такі ітерації доти, поки зміна відстаней і кутів при черговій ітерації не стане менше заданої точності вимірювання дальності і азимута при здійсненні пошуку постраждалих під завалом, після чого від кожного з пошукових пристроїв отримують азимут об'єкта пошуку, при цьому використовують один з отриманих азимутів і одну відстань до об'єкта пошуку для здійснення рятувальних заходів від того пошукового пристрою, від якого вживати рятувальні заходи найефективніше. Винахід належить до області забезпечення безпеки робіт в гірничій промисловості і може використовуватися для визначення місця розташування персоналу під завалами в шахтах. Відомі способи автоматизованого визначення місця розташування персоналу, наприклад «Уніфікована телекомунікаційна система УТАС» яка містить кабель, сервер системи позиціювання, програмне забезпечення системи (У книзі «Способи і засоби створення безпечних і здорових умов праці у вугільних шахтах», збірка наукової праці МАКНДІ Макіївка, 2005р. - с. 323-333) або «Система автоматизованого табельного обліку і визначення місця розташування персоналу і техніки на шахтах і копальнях в комплексі «ТАЛНАХ», яка містить: контролери, зчитувачі системи позиціювання, випромінюючий кабель, сервер системи позиціювання, програмне забезпечення системи (У журналі «Устаткування для підприємств ПЕК» №8, М, 2006р., опубл. 10.08.2006). Проте позиціювання об'єктів (персоналу і транспортних засобів) у цих системах здійснюється з точністю, обумовленою дискретністю установки зчитувачів системи позиціювання і реально складає 100 - 200м. Крім того, система працює лише в межах прямої видимості об'єкту позиціювання і зчитувача і практично непридатна в разі виникнення обвалу гірської породи, що є непереборною перешкодою для радіосигналів з прийнятими в описаних системах довжинами хвиль. Найбільш близьким до передбачуваного винаходу можна віднести «Спосіб пошуку постраждалих під завалами», описаний в патенті України №86558 опублікований 27.04.2009. бюлетень №8. За цим способом пошуку людей під завалами гірських порід кожну людину з числа персоналу шахти забезпечують радіомаяком. В разі аварії пошук постраждалих здійснює спеціальна група рятувальників, яку забезпечують пошуковим устаткуванням, що складається з чотирьох частин. Пошукове устаткування складається з пристрою активації радіомаяків і трьох пристроїв пошуку. Пристрій активації призначений для випромінювання змінного магнітного поля з частотою 1. Пристрій активації складається з генератора безперервних низькочастотних коливань з частотою 1 необхідної потужності і нерухомої котушки з фе ромагнітним сердечником. Розташовують пристрій активації в безпосередній близькості від місця проведення рятувальних заходів. Потужність випромінювання змінного магнітного поля мас бути достатньою для тою, щоб це змінне магнітне поле можна було б прийняти радіомаяками, що знаходяться в зоні проведення рятувальних заходів. У кожному з радіомаяків це змінне магнітне поле приймають, підсилюють і оцінюють його рівень. При перевищенні цього рівня деякого порогового значення в радіомаяку вмикають генератор безперервних низькочастотних коливань з частотою 2 тобто здійснюють активацію радіомаяка. Ці коливання подають на клеми нерухомої котушки з феромагнітним сердечником, яку розташовують в радіомаяку, і випромінюють тим самим змінне магнітне поле з частотою 2. Це змінне магнітне поле з частотою 2 уловлюють трьома рухливими котушками з феромагнітними сердечниками трьох пристроїв пошуку, в кожному своєю котушкою. Прийняті пошуковими пристроями сигнали підсилюють у вузькій смузі частот, випрямляють і подають на вимірники рівня кожного з пристроїв пошуку. Далі здійснюють обертання рухливих котушок пошукових пристроїв і вимірюють рівень сигналу, що приймається, при цьому обертанням котушок досягають появи максимальною рівня вимірюваною сигналу для кожного з пошукових пристроїв. При цьому азимут об'єкту пошуку не вимірюють, оскільки в ближній зоні випромінюючої котушки з феромагнітним сердечником цього зробити неможливо, оскільки цілком неможливо передбачити в якому положенні опиниться випромінююча котушка радіомаяка. При цьому само положення випромінюючої котушки з феромагнітним сердечником радіомаяка не має значення. Оскільки рівень прийнятого сигналу однозначно пов'язаний з відстанню до джерела випромінювання відомою залежністю, яку заздалегідь знімають і запам'ятовують, то по виміряних рівнях сигналів в кожному з пошукових пристроїв визначають три відстані до радіомаяка від кожного з трьох пошукових пристроїв відповідно. Оскільки взаємне розташування всіх трьох пошукових пристроїв відоме, відомі відстані між ними і їх азимути один відносно одного, то по отриманих трьох відстанях від пошукових пристроїв до об'єкту пошуку вирішують звичайну тригоно 5 90072 метричну задачу і отримують три азимути об'єкту пошуку від кожного з трьох пошукових пристроїв відповідно. Для проведення рятувальних заходів вибирають той азимут і ту відстань до об'єкту пошуку від того пошукового пристрою, від якого проводити ці рятувальні заходи найефективніше. Проте описаний спосіб пошуку людей під завалами має низку недоліків, що знижують його ефективність на практиці. Наведений сигнал однозначно пов'язаний з відстанню між приймальною котушкою і отой, що передає наступною залежністю U1 ( t ) K L3 sin (2 t 2 0 ). (1) де L - відстань між котушками, м; К - коефіцієнт пропорційності, що має розмірність В м3, який залежить від амплітуди напруги збудження котушки, що передає, частоти збудження, числа витків обох котушок, їх діаметру, довжини і проникності феромагнітних сердечників: φ0 - початкова фаза низькочастотних коливань: 2 - частота сигналу радіомаяка. Наведена формула справедлива за умови, коли котушки мають максимальний коефіцієнт взаємної індукції. Така ситуація можлива при співісному орієнтуванні котушки радіомаяка і котушки пошукового пристрою. Як було зазначено в прототипі, була побудована номограма, по якій по виміряному значенню рівня сигналу, що приймається, визначалася відстань від рухливої котушки пошукового пристрою до котушки радіомаяка. Дана номограма будувалася виходячи із співісного розташування приймаючих котушок, що передають, оскільки таке розташування відповідає максимальному рівню сигналу, що приймається. Проте при налаштуванні на максимум сигналу, що приймається, рухлива котушка пошукового пристрою і котушка радіомаяка не завжди будуть орієнтовані співісно. Якщо положення котушки пошукового пристрою можна змінювати потрібним чином, то котушка радіомаяка займає абсолютно довільне положення в просторі, оскільки вона належить об'єкту, який нам потрібно знайти. Таке зауваження дуже важливе, оскільки відхилення від співісного взаємною розташування котушок веде до зменшення рівня сигналу, що приймається, та відповідно, до збільшення обчислюваної відстані, фактичне значення якої залишається незмінним. В разі, коли осі котушок паралельні один одному, має місце мінімальний рівень сигналу, що приймається, відповідно максимальне значення обчислюваної дальності. Різниця між максимальним рівнем в разі співісного розташування котушок і мінімальним рівнем в разі паралельного розташування котушок незначна, до того ж слід враховувати кубічну залежність рівня сигналу від відстані, що робить цю різницю ще менш істотною, але вона існує. Таким чином, коефіцієнт К є не лише коефіцієнтом пропорційності, але також повинен враховувати відхилення положення котушок від співісного розташування. Украй необхідно проводити пошук із великою точністю, оскільки погрішність вимірювання дальності веде до погрішності визначення азимута. У зв'язку з цим, оперативність пошуку може бути 6 суттєво знижена, що знизить ефективність пошуку як такого. В основу винаходу поставлено завдання визначення азимута і відстані до об'єкту пошуку, що знаходиться під товщами порід. Вона вирішується завдяки тому, що спочатку генерують безперервні низькочастотні коливання з частотою 1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою 1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній близькості від передбачуваного об'єкту пошуку, при цьому змінне магнітне поле з частотою 1 уловлюють другою нерухомою котушкою з феромагнітним сердечником, яку встановлюють в радіомаяку об'єкту пошуку, після чого сигнал, що знімається з клем другої котушки з феромагнітним сердечником підсилюють у вузькій смузі частот, випрямляють і оцінюють його рівень, причому при перевищенні випрямленого сигналу постійного струму деякого порогового рівня починають генерувати безперервні низькочастотні коливання з частотою 2, які подають на клеми третьої нерухомої котушки з феромагнітним сердечником, яку також розташовують в радіомаяку об'єкту пошуку, і випромінюють тим самим змінне магнітне поле з частотою 2, при цьому змінне магнітне поле з частотою 2 уловлюють четвертою рухливою котушкою з феромагнітним сердечником, яку розташовують в першому пошуковому пристрої, причому це ж змінне магнітне поле з частотою 2 уловлюють п'ятою рухливою котушкою з феромагнітним сердечником, яку розташовують в другому пошуковому пристрої, причому це ж змінне магнітне поле з частотою 2 уловлюють шостою рухливою котушкою з феромагнітним сердечником, яку розташовують в третьому пошуковому пристрої, причому самі пошукові пристрої розташовують один відносно одного на деякій відомій відстані, причому пошукові пристрої розташовують не на одній лінії, при цьому в кожному з трьох пошукових пристроїв проводять вузькосмугове підсилення і випрямлення низькочастотних сигналів, що приймаються рухливими котушками, причому в кожному з трьох пошукових пристроїв випрямлений сигнал постійного струму подають на вимірювачі рівня сигналу, при цьому в кожному з трьох пошукових пристроїв обертають рухливі котушки з феромагнітними сердечниками: у першому пошуковому пристрої - четвертую котушку, в другому - п'яту, в третьому шосту, при цьому в кожному з трьох пошукових пристроїв здійснюють вимірювання рівня прийнятого, підсиленого і випрямленого низькочастотного сигналу, при цьому добиваються появи в кожному з трьох пошукових пристроїв максимального рівня виміряного сигналу, після чого в кожному з трьох пошукових пристроїв ці виміряні рівні сигналів по калібрувальних номограмах переводять у відстані до об’єкту пошуку R1, R2, R3, які відповідають співісному орієнтуванню кожній з трьох котушок пошукових пристроїв відносно нерухомої котушки радіомаяка, при цьому вважають, що знайдені три відстані відповідають максимальному значенню нормувального коефіцієнта К що відповідає співіс 7 ному розташуванню котушок радіомаяка і котушок пошукових пристроїв, при цьому вимірником кута повороту визначають кути повороту осей котушок пошукових пристроїв відносно відомого направлення, наприклад направлення на Північ магнітного поля Землі, потім по знайденимвідстаням R1, R2, R3 обчислюють а жму ти об'єкту пошуку щодо відомого направлення, наприклад направлення на Північ магнітного поля Землі, після чого для кожного з пошукових пристроїв знаходять кут між цим обчисленим азимутом і зміряним азимутом положення осей котушок відносно відомого направлення, наприклад на Північ магнітного поля Землі, при цьому цей знайдений кут для кожного з пошукових пристроїв відповідає куту відхилення осі котушки пошукового пристрою від уявної лінії, що сполучає пошуковий пристрій і радіомаяк, тобто відповідає куту відхилення осей котушок радіомаяка і пошукового пристрою від співісного направлення, при цьому по відомій залежності знаходять значення нормувального коефіцієнта К відповідного цьому куту, причому таку операцію проводять для всіх трьох пошукових пристроїв, після чого коректують значення відстаней від пошукових пристроїв до об'єкту пошуку відповідно до коефіцієнта К і отримують нові уточнені відстані R1 , R2 , R3 , після чого обчислюють уточнені азимути об'єкту пошуку відносно кожного з пошукових пристроїв, після чого знаходять кут між цим уточненим азимутом і раніше виміряним азимутом положення осей котушок пошукових пристроїв відносно відомого направлення, наприклад на Північ магнітного поля Землі і по відомій залежності знаходять значення нормувального коефіцієнта К" відповідного цьому куту і далі знов коректують відстань до об'єкту пошуку, при цьому проводять такі ітерації до тих пір, поки зміна відстаней і кутів при черговій ітерації не стане менше заданої точності вимірювання дальності і азимута при здійсненні пошуку постраждалих під завалом, після чого від кожного з пошукових пристроїв отримують азимут об'єкту пошуку, при цьому використовують один з отриманих азимутів і одну відстань до об'єкту пошуку для здійснення рятувальних заходів від того пошукового пристрою, від якого вживати рятувальні заходи найефективніше. Порівнювання передбачуваного винаходу із вже відомими способами і прототипом показує, що спосіб, що заявляється, виявляє нові технічні властивості, що полягають в більш точнішому визначенні азимута і дальності до об'єкту пошуку, що знаходиться в завалі гірських порід в межах робочих відстаней, які реально в шахтах складають 50 - 100м. Ці властивості передбачуваного винаходу є новими, оскільки в способі-прототипі через властиві йому недоліки, що полягають в неможливості точно визначити азимут і дальність до об'єкту пошуку, для здійснення пошуку потрібні певні додаткові матеріальні і часові затрати. У пропонованому способі пошуку людей під завалами гірських порід кожної людини з числа персоналу шахти забезпечують радіомаяком. В разі аварії пошук постраждалих здійснює спеціальна група рятувальників, яку забезпечують пошу 90072 8 ковим устаткуванням, що складається з чотирьох частин. Пошукове устаткування складається з пристрою активації радіомаяків і трьох пошукових пристроїв. Пристрій активації призначений для випромінювання змінною магнітного поля з частотою 1. Пристрій активації складається з генератора безперервних низькочастотних коливань з частотою необхідної потужності і нерухомої 1 котушки з феромагнітним сердечником. Розташовують пристрій активації в безпосередній близькості від місця проведення рятувальних заходів. Потужність випромінювання змінного магнітного поля має бути достатньою для того, щоб це змінне магнітне поле можна було б прийняти радіомаяками, що знаходяться в зоні проведення рятувальних заходів. У кожному з радіомаяків це змінне магнітне поле приймають, підсилюють і оцінюють його рівень. При перевищенні цього рівня деякого порогового значення в радіомаяку вмикають генератор безперервних низькочастотних коливань з частотою 2, тобто здійснюють активацію радіомаяка. Ці коливання подають на клеми нерухомої котушки з феромагнітним сердечником, яку розташовують в радіомаяку, і випромінюють тим самим змінне магнітне поле з частотою 2. Це змінне магнітне поле з частотою 2 уловлюють трьома рухливими котушками і феромагнітними сердечниками трьох пошукових пристроїв, в кожному своєю котушкою. Прийняті пошуковими пристроями сигнали підсилюють у вузькій смузі частот, випрямляють і подають на вимірники рівня кожного з пошукових пристроїв. Далі здійснюють обертання рухливих котушок пошукових пристроїв і вимірюють рівень сигналу, що приймається, при цьому обертанням котушок добиваються появи максимального рівня виміряного сигналу для кожною з пошукових пристроїв При цьому вимірюють положення осейкотушок кожного з пошукових пристроїв відносною відомого напрямку, наприклад на Північ магнітного поля Землі, при цьому це положення фіксують і запам'ятовують. Положення котушки радіомаяка заздалегідь невідоме, тому на початковій стадії передбачають, що котушки кожного пошукового пристрою і радіомаяка орієнтовані співісно. По відомих номограмах визначають відстані від пошукових пристроїв до об'єкту пошуку, які відповідають співісному розташуванню приймальних і отой, що передає котушок. Після чого обчислюють гіпотетичні направлення в напрямку об'єкту пошуку, тобто радіомаяка, які збігаються з положеннями осей рухливих котушок пошукових пристроїв. Ці направлення є лініями відліку при коректуванні визначуваних відстаней і азимутів об'єкту пошуку. При визначенні відстаней коефіцієнт К', що входить у формулу (1), розглядають як коефіцієнт нормування, який враховує взаємне розташування котушок. Мінімальне значення коефіцієнта К відповідає паралельному взаємному розташуванню осей котушок. При такому розташуванні кут θ між прямою, що сполучає центри цих котушок, і прямою, співпадаючою з віссю кожною з котушок рівний 90°. При співісному розташуванні котушок θ = 0°. При такому розташуванні коефіцієнт К має максимальне значення. Експериментальним шляхом отримують номограму залежності коефіцієнта но 9 рмування К від кута θ. За допомогою цієї залежності мають можливість коректувати значення дальності і відповідно азимута об'єкту пошуку. Таким чином при першому вимірюванні отримують три відстані R1, R2 і R3 яким відповідає максимальне значення коефіцієнта нормування К та кут θ = 0°. Далі визначають три азимути об'єкту пошуку, вирішуючи звичайну тригонометричну задачу. Визначивши азимути об'єкту пошуку, визначають кут відхилення осей котушок пошукових пристроїв від співісного направлення і. проводячи першу ітерацію, уточнюють відстані R1', R2' і R3' використовуючи залежність Κ(θ). Очевидно при цьому, що відбувається зсув визначуваних азимутів відносно гіпотетичного напрямку, відповідного співісному розташуванню, на кут θ для кожного і пошукових пристроїв свій. Для нових відстаней R1', R2' і R3' знов визначають три азимути об'єкту пошуку і три кути відхилення осей котушок пошукових пристроїв від співісного напрямку. Проводячи другу ітерацію знов уточнюють відстані R1", R2" і R3" використовуючи ту ж залежність К(θ) і знов уточнюють три азимути об'єкту пошуку і відповідно три кути відхилення осей котушок пошукових пристроїв від співвісної лінії. Проводять ітерації до тих пір, поки зміна відстаней і кутів при кожній подальшій ітерації не стане менше необхідної точності визначення дальності і азимута об'єкту пошуку. Для проведення рятувальних заходів вибирають той азимут і ту відстань до об'єкту пошуку від того пошукового пристрою, від якого проводити ці рятувальні заходи найефективніше. Вказаний спосіб пошуку постраждалих під завалами можна реалізувати за допомогою пристрою, наведеного на Фіг.1. Пристрій пошуку постраждалих під завалами складається з пристрою активації, радіомаяка і пристроїв пошуку і містить генератори низькочастотних коливань 1 і 2, нерухомі котушки з феромагнітними сердечниками 3, 4 і 5, рухливих котушок 5 феромагнітними сердечниками 6, 7 і 8, вузькосмужні підсилювачі низькочастотних сигналів 9, 10, 11 і 12, випрямлячі 13, 14, 15 і 16, пороговий пристрій 17, вимірники рівня 18, 19 і 20, вимірники кута повороту подовжніх осей котушок з феромагнітним сердечником пошукових пристроїв довкола їх осей обертання відносно деякого відомого направлення, наприклад на Північ магнітного поля Землі 21, 22 і 23, які надалі називатимемо вимірники азимута. Вихід генератора низькочастотних коливань 1 з'єднаний з виводами нерухомої котушки з феромагнітним сердечником 3, виводи нерухомої котушки і феромагнітним сердечником 4 з'єднані з входом вузькосмужного підсилювача низькочастотних сигналів 9, вихід якого з’єднаний з входом випрямляча 13, вихід якого з'єднаний з входом порогового пристрою 17, вихід якого з'єднаний з входом керування низькочастотного генератора 2, вихід якого з'єднаний з виводами нерухомої котушки з феромагнітним сердечником 5, при цьому виводи рухливої котушки з феромагнітним сердечником 6 з'єднані з входом вузькосмужного підсилювача низькочастотних сигналів 10, при цьому виводи рухливої котушки з феромагнітним серде 90072 10 чником 7 з'єднані з входом вузькосмугового підсилювача низькочастотних сигналів 11, при цьому виводи рухливої котушки з феромагнітним сердечником 8 з'єднані з входом вузькосмужного підсилювача низькочастотних сигналів 12, при цьому вихід вузькосмужного підсилювача низькочастотних сигналів 10 з'єднаний з входом випрямляча 14, при цьому вихід вузькосмужного підсилювача низькочастотних сигналів 11 з'єднаний з входом випрямляча 15, при цьому вихід вузькосмужного підсилювача низькочастотних сигналів 12 з'єднаний з входом випрямляча 16, при цьому вихід випрямляча 14 з'єднаний з входом вимірника рівня 18, при цьому вихід випрямляча 15 з'єднаний з входом вимірника рівня 19, при цьому вихід випрямляча 16 з'єднаний з входом вимірника рівня 20, при цьому вісь обертання рухливої котушки з феромагнітним сердечником 6 з'єднана з входом вимірника азимута 21, вісь обертання рухливої котушки з феромагнітним сердечником 7 з'єднана з входом вимірника азимута 22, при цьому вісь обертання рухливої котушки з феромагнітним сердечником 8 з'єднана з входом вимірника азимута 23. Працює пристрій, що реалізує спосіб пошуку постраждалих під завалами таким чином. Генератор низькочастотних коливань 1 формує низькочастотні коливання з частотою 1 необхідній потужності, які збуджують за допомогою нерухомої котушки з феромагнітним сердечником 3 змінне низькочастотне магнітне поле з частотою 1. Це змінне низькочастотне магнітне поле уловлюють нерухомою котушкою з феромагнітним сердечником 4, яка входить до складу радіомаяка. Сигнал з виводів цієї нерухомої котушки з феромагнітним сердечником 4 подають на вхід вузькосмужного підсилювача низькочастотних сигналів 9, який також входить до складу радіомаяка, де прийнятий сигнал підсилюють у вузькій смузі частот, відокремлюючи його від індустріальних завад, і подають на випрямляч 13, що входить до складу радіомаяка. Випрямлений сигнал подають на вхід порогового пристрою 17, що входить до складу радіомаяка. При перевищенні прийнятого, посиленого і випрямленого сигналу деякого порогового рівня пороговий пристрій спрацьовує і вмикає генератор безперервних низькочастотних коливань 2, що входить до складу радіомаяка. Цей генератор безперервних низькочастотних коливань збуджує за допомогою нерухомої котушки з феромагнітним сердечником 5, що входить до складу радіомаяка, змінне низькочастотне магнітне поле з частотою 2 заданої інтенсивності. Це змінне низькочастотне магнітне поле з частотою f2 уловлюють рухливими котушками з феромагнітними сердечниками 6, 7 і 8, що входять до складу трьох пошукових пристроїв. Далі шляхом обертання котушок 6, 7 і 8 добиваються отримання па виходах 18, 19, 20 максимального рівня сигналу. Цей сигнал має малий рівень і присутній на фоні індустріальних завад, що мають як магнітну, так і радіочастотну природи. Ці завади в шахтах хоч і мають знижений рівень, але присутні у будьякому випадку. 11 З цієї причини в кожній з пошукових станцій проводять вузькосмужне підсилення прийнятого сигналу і відділення його від індустріальних перешкод за допомогою вузькосмужних низькочастотних підсилювачів 10, 11 і 12, що входять до складу трьох пошукових пристроїв. Для вимірювання рівня прийнятого сигналу в пошукових станціях проводять його випрямлення за допомогою випрямлячів 14, 15 і 16, що входять до складу трьох пошукових пристроїв. Прийняті, посилені і випрямлені сигнали подають на входи вимірників рівня 18, 19 і 20, що входять до складу трьох пошукових пристроїв. Далі шляхом обертання котушок 6, 7 і 8 добиваються отримання на виходах 18, 19, 20 максимального рівня сигналу. Після того, як були отримані максимальні значення виміряних рівнів прийнятих сигналів, вимірниками азимута 21, 22 і 23 визначають положення рухливих котушок пошукових пристроїв. Після цього по відповідних номограмах визначають відстані R1, R2, R3 від кожної з рухливих котушок або від кожного з пошукових пристроїв до радіомаяка або об'єкту пошуку. Ці відстані визначають з врахуванням коефіцієнта К, який на початковому етапі приймають рівним максимальному значенню. Вирішуючи звичайну тригонометричну задачу, визначають три азимути об'єкту пошуку. Після цього знаходять кут між азимутом об'єкту пошуку відносно першого пошукового пристрою і кутом відхилення осі рухливої котушки 6 відносно гіпотетичної співвісної лінії котушок радіомаяка і першого пошукового пристрою - θ1. При цьому знаходять кут між азимутом об'єкту пошуку відносно другого пошуковою пристрою і кутом відхилення осі рухливої котушки 7 відносно гіпотетичної співвісної лінії котушок радіомаяка і другого пошукового пристрою - θ2. При цьому знаходять куг між азимутом об'єкту пошуку відносно третього пошукового пристрою і кутом відхилення осі рухливої котушки 8 відносно гіпотетичної співвісної лінії котушок радіомаяка і третього пошукового пристрою - θ3. По експериментальній залежності K(θ) визначають значення коефіцієнтів К1, К2, К3, які відповідають кутам θ1, θ2, θ3. Відповідно до отриманих нормувальних коефіцієнтів коректують раніше набуті значення відстаней і отримують нові відстані R1, R2', R3'. Після цього 90072 12 аналогічним чином вирішуючи звичайну тригонометричну задачу, визначають три азимути об'єкту пошуку і знаходять кути θ1', θ2' і θ3'. Після цього знаходять відповідні цим кутам коефіцієнти K1 , К2 , К3'. Відповідно до нових коефіцієнтів коректують значення відстаней, що були отримані на етапі попередньої ітерації, і знаходять нові значення R1", R2", R3". Ітерації проводять до тих пір, поки зміна відстаней і кутів при кожній подальшій ітерації не стане менше необхідної точності визначення дальності і азимута об'єкту пошуку. Маючи, таким чином, три певні відстані від кожною з трьох пошукових пристроїв до об'єкту пошуку, відстані між пошуковими пристроями, які відомі наперед, азимути кожного з пошукових пристроїв, один відносно одної о, які також відомі наперед, і отримують, таким чином, три азимути об'єкту пошуку від кожного з трьох пошукових пристроїв відповідно. Для проведення рятувальних заходів вибирають той азимут об'єкту пошуку і, відповідно ту відстань до об'єкту пошуку від того з пошукових (ірисі роїв, від якого проводити рятувальні заходи найефективніше. Таким чином, отримують координат об'єму пошуку, людину, що знаходиться під завалом. Народногосподарський ефект від використання передбачуваного винаходу пов'язаний з появою можливості швидко і точно визначити координати людини, що перебуває під завалом гірської породи. При цьому з'являється можливість оперативно вжити рятувальні заходи і забезпечити, тим самим, збереження життя людей у кращому разі, у найгіршому випадку є можливість відшукати тіла людей, вже загиблих внаслідок аварії. При вживанні рятувальних заходів у більшості випадків місце аварії відоме. У цих випадках можна обійтися лише двома пошуковими пристроями. При визначенні азимутів об'єкту пошуку від двох пошукових пристроїв описаним способом виникає принципова невизначеність у визначенні азимута. При цьому необхідно вибрати азимут від пошукового пристрою на об'єкт пошуку один і двох. Один і азимутів указуватиме на місце завалу, іншій указувати в протилежному напрямку. Вибрати потрібний азимут в цьому випадку можна організаційно. 13 Комп’ютерна верстка Л. Купенко 90072 Підписне 14 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюIteration technique for searching for miners under crump
Автори англійськоюShyrokov Ihor Borysovych, Durmanov Maksym Anatoliiovych
Назва патенту російськоюИтерационный способ поиска пострадавших под завалами
Автори російськоюШироков Игорь Борисович, Дурманов Максим Анатольевич
МПК / Мітки
МПК: A62B 99/00, H04B 5/00, E21F 11/00
Мітки: завалами, ітераційний, спосіб, пошуку, постраждалих
Код посилання
<a href="https://ua.patents.su/7-90072-iteracijjnijj-sposib-poshuku-postrazhdalikh-pid-zavalami.html" target="_blank" rel="follow" title="База патентів України">Ітераційний спосіб пошуку постраждалих під завалами</a>
Спосіб пошуку постраждалих під завалами
Номер патенту: 90071
Опубліковано: 25.03.2010
Автор: Широков Ігор Борисович
МПК: H04B 5/00, E21F 11/00, A62B 99/00
Мітки: постраждалих, пошуку, завалами, спосіб
Формула / Реферат:
Спосіб пошуку постраждалих під завалами, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній...
Спосіб пошуку постраждалих під завалами
Номер патенту: 87642
Опубліковано: 27.07.2009
Автор: Широков Ігор Борисович
МПК: H04B 5/00, A62B 99/00, E21F 11/00
Мітки: постраждалих, спосіб, пошуку, завалами
Формула / Реферат:
Спосіб пошуку постраждалих під завалами, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній...
Спосіб пошуку постраждалих під завалами
Номер патенту: 86558
Опубліковано: 27.04.2009
Автори: Широков Ігор Борисович, Яуфман Анатолій Іванович
МПК: H04B 5/00, E21F 11/00, A62B 99/00
Мітки: постраждалих, завалами, спосіб, пошуку
Формула / Реферат:
Спосіб пошуку постраждалих під завалами, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній...
Спосіб пошуку постраждалих під завалами і дистанційного контролю їх серцевого ритму
Номер патенту: 89933
Опубліковано: 10.03.2010
Автор: Широков Ігор Борисович
МПК: E21F 11/00, H04B 5/00, A62B 33/00
Мітки: контролю, пошуку, серцевого, дистанційного, спосіб, постраждалих, ритму, завалами
Формула / Реферат:
Спосіб пошуку постраждалих під завалами і дистанційного контролю їх серцевого ритму, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з...
Спосіб пошуку даних в пошукових системах
Номер патенту: 33915
Опубліковано: 25.07.2008
Автор: Савчук Олег Леонідович
МПК: G06F 17/30
Мітки: пошуку, пошукових, спосіб, системах, даних
Формула / Реферат:
1. Спосіб пошуку даних в пошукових системах, у якому за допомогою суфіксного, а також префіксного дерева, та дерева приставок і закінчень за допомогою електронних засобів виявляються та вилучаються змінні частини, який відрізняється тим, що за допомогою електронних засобів у незмінних частинах слів текстів документів різних мов, за якими проводиться пошук, та у ключових словах запитів також вилучаються частини, які змінюються у...
Попередній патент: Спосіб пошуку постраждалих під завалами
Наступний патент: Самозмащувальний композиційний антифрикційний матеріал на основі міді для роботи у вакуумі
Випадковий патент: Безнакипна багатокорпусна випарна установка з тепловим насосом