Спосіб пошуку постраждалих під завалами

Формула / Реферат
Спосіб пошуку постраждалих під завалами, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній близькості від передбачуваного об'єкта пошуку, при цьому змінне магнітне поле з частотою f1 сприймають другою нерухомою котушкою з феромагнітним сердечником, яку встановлюють в радіомаяку об'єкта пошуку, після чого сигнал, що знімається з клем другої котушки з феромагнітним сердечником, підсилюють у вузькій смузі частот, випрямляють і оцінюють його рівень, причому при перевищенні випрямленого сигналу постійного струму деякого порогового рівня починають генерувати безперервні низькочастотні коливання з частотою f2, які подають на клеми третьої нерухомої котушки з феромагнітним сердечником, яку також розташовують в радіомаяку об'єкта пошуку, і випромінюють тим самим змінне магнітне поле з частотою f2, при цьому змінне магнітне поле з частотою f2 уловлюють четвертою рухомою котушкою з феромагнітним сердечником, яку розташовують в першому пошуковому пристрої, причому це ж змінне магнітне поле з частотою f2 уловлюють п'ятою рухомою котушкою з феромагнітним сердечником, яку розташовують в другому пошуковому пристрої, причому це ж змінне магнітне поле з частотою f2 уловлюють шостою рухомою котушкою з феромагнітним сердечником, яку розташовують в третьому пошуковому пристрої, причому самі пошукові пристрої розташовують один відносно одного на наперед заданій відстані, причому пошукові пристрої розташовують довільно, але при цьому вимірюють азимути пошукових пристроїв один відносно одного і деякого відомого напрямку, наприклад на Північ магнітного поля Землі, при цьому в кожному з трьох пошукових пристроїв проводять вузькосмугове підсилення і випрямлення низькочастотних сигналів, що приймаються рухомими котушками, причому в кожному з трьох пошукових пристроїв випрямлений сигнал постійного струму подають на індикатор рівня сигналу, при цьому в кожному з трьох пошукових пристроїв обертають рухливі котушки з феромагнітними сердечниками в горизонтальній площині навколо осі, перпендикулярної до подовжньої осі котушки з феромагнітним сердечником: у першому пошуковому пристрої - четверту котушку, в другому - п'яту, в третьому - шосту, при цьому добиваються появи на індикаторах рівня кожного з трьох пошукових пристроїв або мінімальних, або максимальних показань, причому при високих рівнях сигналу, що приймається, добиваються появи на індикаторі рівня мінімальних показань, а при низьких рівнях сигналу, що приймається, добиваються появи на індикаторі рівня максимальних показань, причому обертання котушки з феромагнітним сердечником пошукового пристрою до появи мінімальних показань індикатора рівня сигналу, що приймається пошуковим пристроєм, є переважним, при цьому в кожному з трьох пошукових пристроїв здійснюють вимірювання азимута повороту подовжньої осі рухливої котушки з феромагнітним сердечником відносно деякого відомого напрямку, наприклад на Північ магнітного поля Землі, при цьому отримують три кути повороту подовжніх осей котушок з феромагнітними сердечниками пошукових пристроїв відносно цього відомого напрямку, кожен з яких однозначно пов'язаний з кутом розташування подовжньої осі котушки з феромагнітним сердечником радіомаяка об'єкта пошуку відносно цього ж відомого напрямку, причому для тих пошукових пристроїв, для яких обертання рухливої котушки з феромагнітним сердечником проводилося до появи максимуму сигналу, що приймався, до виміряного кута положення подовжньої осі котушки з феромагнітним сердечником пошукового пристрою додають 90°, після чого вирішують тригонометричну задачу для трьох трикутників, в якій відомі по одній із сторін всіх трьох трикутників і відносні та взаємозв'язані один з одним кути при їх вершинах, і від кожного з пошукових пристроїв отримують однозначно дійсні азимути і дальності об'єкта пошуку, при цьому використовують один з отриманих азимутів і одну з отриманих дальностей об'єкта пошуку для здійснення рятувальних заходів від того пошукового пристрою, для якого вживати рятувальні заходи найефективніше.
Текст
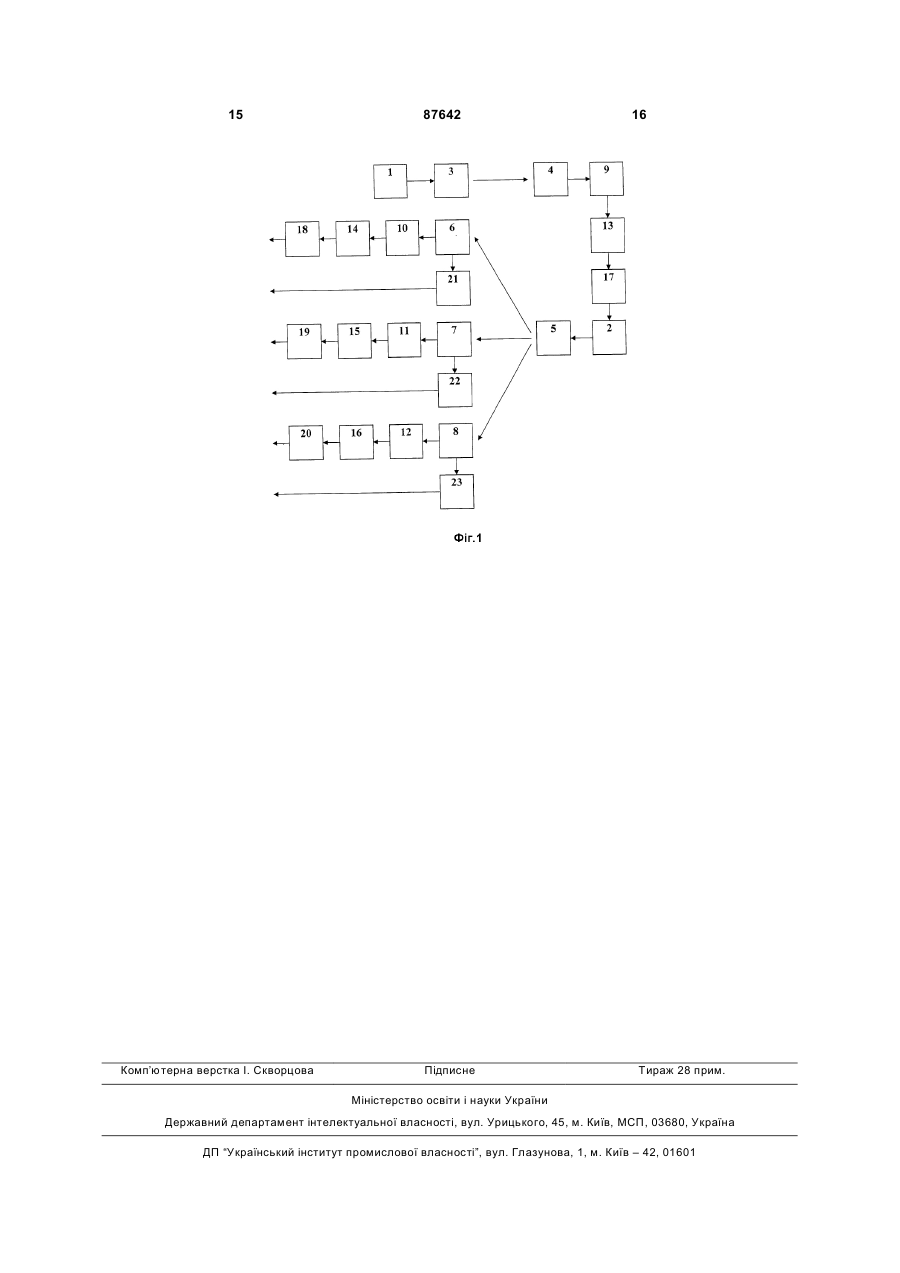
Спосіб пошуку постраждалих під завалами, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній близькості від передбачуваного об'єкта пошуку, при цьому змінне магнітне поле з частотою f1 сприймають другою нерухомою котушкою з феромагнітним сердечником, яку встановлюють в радіомаяку об'єкта пошуку, після чого сигнал, що знімається з клем другої котушки з феромагнітним сердечником, підсилюють у вузькій смузі частот, випрямляють і оцінюють його рівень, причому при перевищенні випрямленого сигналу постійного струму деякого порогового рівня починають генерувати безперервні низькочастотні коливання з частотою f2, які подають на клеми третьої нерухомої котушки з феромагнітним сердечником, яку також розташовують в радіомаяку об'єкта пошуку, і випромінюють тим самим змінне магнітне поле з частотою f2, при цьому змінне магнітне поле з частотою f2 уловлюють четвертою рухомою котушкою з феромагнітним сердечником, яку розташовують в першому пошуковому пристрої, причому це ж змінне магнітне поле з частотою f2 уловлюють п'ятою рухомою котушкою з феромагнітним сердечником, яку розташовують в другому пошуковому пристрої, причому це ж змінне магнітне поле з частотою f2 уловлюють шостою рухомою котушкою з ферома 2 (19) 1 3 87642 4 яви максимуму сигналу, що приймався, до виміряного кута положення подовжньої осі котушки з феромагнітним сердечником пошукового пристрою додають 90°, після чого вирішують тригонометричну задачу для трьох трикутників, в якій відомі по одній із сторін всіх трьох трикутників і відносні та взаємозв'язані один з одним кути при їх вершинах, і від кожного з пошукових пристроїв отримують однозначно дійсні азимути і дальності об'єкта пошуку, при цьому використовують один з отриманих азимутів і одну з отриманих дальностей об'єкта пошуку для здійснення рятувальних заходів від того пошукового пристрою, для якого вживати рятувальні заходи найефективніше. Винахід належить до області забезпечення безпеки робіт в гірничій промисловості і може використовуватися для визначення місця розташування персоналу під завалами в шахтах. Відомі способи автоматизованого визначення місця розташування персоналу, наприклад: «Уніфікована телекомунікаційна система УТАС» яка містить кабель, сервер системи позиціювання, програмне забезпечення системи (У книзі «Способи і засоби створення безпечних і здорових умов праці у вугільних шахтах», збірка наукової праці МАКНДІ Макіївка, 2005 р. - сс. 323-333) або «Система автоматизованого табельного обліку і визначення місця розташування персоналу і техніки на шахтах і копальнях в комплексі «ТАЛНАХ», яка містить: контролери, зчитувачі системи позиціювання, випромінюючий кабель, сервер системи позиціювання, програмне забезпечення системи (У журналі «Устаткування для підприємств ПЕК» №8, М., 2006 р., опубл. 10.08.2006). Проте позиціювання об'єктів (персоналу і транспортних засобів) у цих системах здійснюється з точністю, обумовленою дискретністю установки зчитувачів системи позиціювання і реально складає 100 - 200 м. Крім того, система працює лише в межах прямої видимості об'єкту позиціювання і зчитувача і практично непридатна в разі виникнення обвалу гірської породи, що є непереборною перешкодою для радіосигналів з прийнятими в описаних системах довжинами хвиль. Найбільш близьким до передбачуваного винаходу відноситься «Спосіб пошуку постраждалих під завалами», описаний в заявці на винахід № а 2008 10162 від 07.08.2008. За цим способом визначення місця розташування персоналу шахти під завалами, кожного працівника шахти забезпечують радіомаяком, а пошукову групу забезпечують пристроєм активації радіомаяків і пристроями пошуку. При цьому, до складу пристрою активації вводять: перший генератор першої низької частоти, першу нерухому котушку з феромагнітним сердечником. До складу радіомаяка вводять: нерухомі другу і третю котушки з феромагнітними сердечниками, вузькосмуговий підсилювач першої низької частоти, детектор несучої, пороговий пристрій, другий генератор другої низької частоти. До складу трьох пошукових пристроїв, поодинці в кожен, вводять: рухливі котушки з феромагнітними сердечниками, вузькосмугови підсилювачі сигналів другої низької частоти, випрямлячі, вимірники рівня. За описаним способом за допомогою першого генератора низької частоти формують низькочас тотний гармонійний сигнал з першою частотою, який подають на першу нерухому котушку з феромагнітним сердечником. Через цю першу котушку з феромагнітним сердечником випромінюють в простір змінне магнітне поле першої частоти. При цьому першу котушку з феромагнітним сердечником розташовують в безпосередній близькості від передбачуваного об'єкту пошуку. Другою нерухомою котушкою з феромагнітним сердечником радіомаяка це змінне магнітне поле першої частоти приймають і потім отриманий низькочастотний гармонійний сигнал з першою частотою підсилюють за допомогою вузькосмугового підсилювача першої низької частоти радіомаяка, після чого підсилений низькочастотний сигнал подають на детектор несучої, де цей сигнал змінного струму випрямляють. Далі випрямлений сигнал подають на пороговий пристрій, де порівнюють напругу випрямленого сигналу з деяким пороговим рівнем і при перевищенні рівня випрямленого сигналу цього порогового рівня включають другий генератор низької частоти, на виході якого формують низькочастотний гармонійний сигнал з другою частотою, який подають на третю нерухому котушку з феромагнітним сердечником. Через цю третю нерухому котушку з феромагнітним сердечником радіомаяка випромінюють в простір змінне магнітне поле другої низької частоти. Причому четвертою рухливою котушкою з феромагнітним сердечником першого пошукового пристрою це змінне магнітне поле другої низької частоти приймають і тоді отриманий низькочастотний гармонійний сигнал з другою частотою підсилюють за допомогою першого вузькосмугового підсилювача другої низької частоти першого пошукового пристрою і випрямляють за допомогою першого випрямляча першого пошукового пристрою, після чого випрямлений сигнал постійного струму подають до першого вимірника рівня першого пошукового пристрою. Причому п'ятою рухливою котушкою з феромагнітним сердечником другого пошукового пристрою це змінне магнітне поле другої низької частоти приймають і потім отриманий низькочастотний гармонійний сигнал з другою частотою підсилюють за допомогою другого вузькосмугового підсилювача другої низької частоти другого пошукового пристрою і випрямляють за допомогою другого випрямляча другого пошукового пристрою, після чого випрямлений сигнал постійного струму подають до другого вимірника рівня другого пошукового пристрою. Причому шостою рухливою котушкою з феромагнітним сердечником третього пошукового пристрою це змінне магнітне поле другої низької час 5 тоти приймають і потім отриманий низькочастотний гармонійний сигнал з другою частотою підсилюють за допомогою третього вузькосмугового підсилювача другої низької частоти третього пошукового пристрою і випрямляють за допомогою третього випрямляча третього пошукового пристрою, після чого випрямлений сигнал постійного струму подають до третього вимірника рівня третього пошукового пристрою. При цьому гармонійні низькочастотні сигнали, які виробляють першим і другим низькочастотними генераторами роблять різними по частоті. Цим забезпечують розв'язку низькочастотних підсилювальних трактів радіомаяка і пошукового пристрою. При цьому самі пошукові пристрої розташовують один відносно одного на деякій відомій відстані, причому пошукові пристрої розташовують не на одній лінії. При цьому обертають рухливі котушки пошукових пристроїв і добиваються максимальних показань вимірників рівня. При цьому вимірюють рівні сигналів, що приймаються, всіма трьома вимірниками всіх трьох пошукових пристроїв. Далі по виміряних рівнях сигналів і калібрувальних номограмах визначають відстані від радіомаяка до кожного з трьох пошукових пристроїв і далі, вирішуючи звичайну тригонометричну задачу, визначають азимути радіомаяка від кожного з трьох пошукових пристроїв. Проте, описаний спосіб пошуку людей під завалами має низку істотних недоліків, що призводять до помилок визначення дальності від пошукових пристроїв до радіомаяка і, відповідно, до помилок визначення азимутів об'єкту пошуку. По-перше, рівень низькочастотного сигналу, що наводиться в приймальній котушці з феромагнітним сердечником пошукового пристрою при збудженні котушки з феромагнітним сердечником радіомаяка напругою змінного струму низької частоти не однаковий при співвісному і паралельному розташуванні збуджуючої і приймальної котушок. Це обумовлено фізикою формування і прийому змінного магнітного поля котушками з феромагнітними сердечниками. Відповідно, максимальні показання вимірника рівня пошукового пристрою , що досягаються при обертанні його рухливої котушки з феромагнітним сердечником, будуть неоднакові при однаковій відстані між котушками з феромагнітними сердечниками радіомаяка і пошукового пристрою, але різною орієнтацією котушки з феромагнітним сердечником радіомаяка. Різниця в показаннях вимірника рівня при співвісному і паралельному розташуванні котушок з феромагнітними сердечниками буде невелика і до того ж, якщо врахувати, що напруга змінного струму, що наводиться в приймальній котушці з феромагнітним сердечником змінним магнітним полем, обернено пропорційно до куба відстані між збуджуючою і приймальною котушками з феромагнітними сердечниками, то реальна похибка у визначенні дальності складатиме корінь кубічний від похибки вимірника рівня, але вона буде. По-друге, всі приведені вище міркування щодо взаємної орієнтації котушок з феромагнітними сердечниками радіомаяка і пошукового пристрою справедливі, якщо котушки розташовуються в од 87642 6 ній площині, і одна з них обертається в цій площині. Передбачити ж, в якій площині буде розташована котушка з феромагнітним сердечником радіомаяка, не є можливим. Для вирішення цієї проблеми необхідно або вживати заходи по обмеженню можливої площини, займаної котушкою з феромагнітним сердечником радіомаяка, або необхідно в пошукових пристроях обертати приймальну котушку з феромагнітним сердечником у двох площинах. І те й інше спричиняє собою ускладнення процедури пошуку, збільшення часу пошуку, тобто зниження його ефективності. У той же час, украй необхідно ефективно вирішувати завдання визначення азимута об'єкту пошуку і відстані до нього з високою точністю і досить швидко, тобто проводити пошук людей, що перебувають під завалами гірських порід. Велика смертність серед персоналу вугільних шахт обумовлена саме тим, що при існуючому становищі справ швидко відшукати постраждалих людей не є можливим. У підґрунтя винаходу поставлено завдання визначення азимута і дальності об'єкту пошуку, людини, що перебуває в товщі гірських порід. Воно вирішується завдяки тому, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній близькості від передбачуваного об'єкту пошуку, при цьому змінне магнітне поле з частотою f1 сприймають другою нерухомою котушкою з феромагнітним сердечником, яку встановлюють в радіомаяку об'єкту пошуку, після чого сигнал, що знімається з клем другої котушки з феромагнітним сердечником, підсилюють у вузькій смузі частот, випрямляють і оцінюють його рівень, причому при перевищенні випрямленого сигналу постійного струму деякого порогового рівня починають генерувати безперервні низькочастотні коливання з частотою f2, які подають на клеми третьої нерухомої котушки з феромагнітним сердечником, яку також розташовують в радіомаяку об'єкту пошуку, і випромінюють тим самим змінне магнітне поле з частотою f2, при цьому змінне магнітне поле з частотою f2 уловлюють четвертою рухливою котушкою з феромагнітним сердечником, яку розташовують в першому пошуковому пристрої, причому це ж змінне магнітне поле з частотою f2 уловлюють п'ятою рухливою котушкою з феромагнітним сердечником, яку розташовують в другому пошуковому пристрої, причому це ж змінне магнітне поле з частотою f2 уловлюють шостою рухливою котушкою з феромагнітним сердечником, яку розташовують в третьому пошуковому пристрої, причому самі пошукові пристрої розташовують один відносно одного на деякій відомій відстані, причому пошукові пристрої розташовують довільно, але при цьому вимірюють азимути пошукових пристроїв один відносно одного і деякого відомого напрямку, наприклад, на Північ магнітного поля Землі, при цьому в кожному з трьох пошукових пристроїв проводять вузькосмугове підсилення і випрямлен 7 ня низькочастотних сигналів, що приймаються рухливими котушками, причому в кожному з трьох пошукових пристроїв випрямлений сигнал постійного струму подають на індикатор рівня сигналу, при цьому в кожному з трьох пошукових пристроїв обертають рухливі котушки з феромагнітними сердечниками в горизонтальній площині навколо вісі, перпендикулярної до подовжньої осі котушки з феромагнітним сердечником: у першому пошуковому пристрої - четвертую котушку, в другому п'яту, в третьому - шосту, при цьому добиваються появи на індикаторах рівня кожного з трьох пошукових пристроїв або мінімальних, або максимальних показань, причому при високих рівнях сигналу, що приймається, добиваються появи на індикаторі рівня мінімальних показань, а при низьких рівнях сигналу, що приймається, добиваються появи на індикаторі рівня максимальних показань, причому обертання котушки з феромагнітним сердечником пошукового пристрою до появи мінімальних показань індикатора рівня сигналу, що приймається пошуковим пристроєм, є переважним, при цьому в кожному з трьох пошукових пристроїв здійснюють вимірювання азимута повороту подовжньої осі рухливої котушки з феромагнітним сердечником відносно деякого відомого напрямку, наприклад, на Північ магнітного поля Землі, при цьому отримують три кути повороту подовжніх осей котушок з феромагнітними сердечниками пошукових пристроїв відносно цього відомого напрямку, кожен з яких однозначно пов'язаний з кутом розташування подовжньої осі котушки з феромагнітним сердечником радіомаяка об'єкту пошуку відносно цього ж відомого напрямку, причому для тих пошукових пристроїв, для яких обертання рухливої котушки з феромагнітним сердечником проводилося до появи максимуму сигналу, що приймався, до виміряного кута положення подовжньої осі котушки з феромагнітним сердечником пошукового пристрою додають 90°, після чого вирішують тригонометричну задачу для трьох трикутників, в якій відомі по одній із сторін всіх трьох трикутників і відносні, та взаємозв'язані один з одним кути при їх вершинах і від кожного з пошукових пристроїв отримують однозначно дійсні азимути і дальності об'єкту пошуку, при цьому використовують один з отриманих азимутів і одну з отриманих дальностей об'єкту пошуку для здійснення рятувальних заходів від того пошукового пристрою, для якого вживати рятувальні заходи найефективніше. Порівняння передбачуваного винаходу з вже відомими способами і прототипом показує, що спосіб, що заявляється, виявляє нові технічні властивості, що полягають в можливості з високою точністю однозначного і швидкого визначення азимута і дальності об'єкту пошуку, що перебуває в завалі гірських порід в межах робочих відстаней, які реально в шахтах складають 50-100 м. Ці властивості передбачуваного винаходу є новими, тому що в способі-прототипі, через властиві йому недоліки, що полягають у визначенні дальності, а потім і азимута об'єкту пошуку з деякою помилкою і що полягають в досить складній процедурі пошуку, яка веде до збільшення часу пошуку, проводити рятувальні операції по пошуку 87642 8 людей під обвалами гірських порід в шахтах не є досить ефективним. У за пропонованому способі пошуку людей під завалами гірських порід кожну людину з числа персоналу шахти забезпечують радіомаяком. У разі аварії пошук постраждалих здійснює спеціальна група рятувальників, яку забезпечують пошуковим обладнанням, що складається з чотирьох частин. Пошукове обладнання складається з пристрою активації радіомаяків і трьох пошукових пристроїв. Пристрій активації призначений для випромінювання змінного магнітного поля з частотою f1 складає з генератора безперервних низькочастотних коливань з частотою f1 необхідної потужності і нерухомої котушки з феромагнітним сердечником. Розташовують пристрій активації в безпосередній близькості від місця проведення рятувальних заходів. Потужність випромінювання змінного магнітного поля має бути достатньою для того, щоб це змінне магнітне поле можна було б прийняти радіомаяками, що перебувають в зоні проведення рятувальних заходів. У кожному з радіомаяків це змінне магнітне поле приймають, підсилюють і оцінюють його рівень. При перевищенні цим рівнем деякого порогового значення в радіомаяку включають генератор безперервних низькочастотних коливань з частотою f2, тобто здійснюють активацію радіомаяка. Ці коливання подають на клеми нерухомої котушки з феромагнітним сердечником, яку розташовують в радіомаяку, і випромінюють тим самим змінне магнітне поле з частотою f2. Це змінне магнітне поле з частотою f2 уловлюють трьома рухливими котушками з феромагнітними сердечниками трьох пошукових пристроїв, в кожному своєю котушкою. При цьому самі пошукові пристрої розташовують один відносно одного на деякій відомій відстані, причому пошукові пристрої розташовують довільно, але при цьому вимірюють азимути пошукових пристроїв один відносно одного і деякого відомого напрямку, наприклад, на Північ магнітного поля Землі. Прийняті пошуковими пристроями сигнали підсилюють у вузькій смузі частот, випрямляють і подають на індикатори рівня кожного з пошукових пристроїв. Далі здійснюють обертання рухливих котушок пошукових пристроїв горизонтальної площини навколо вісі, перпендикулярної подовжній осі котушок з феромагнітним сердечником і оцінюють рівень сигналу, що приймається, при цьому обертанням котушок добиваються появи або мінімального, або максимального рівня сигналу, що приймається, для кожного з пошукових пристроїв. При цьому при високих рівнях сигналу, що приймається, добиваються появи на індикаторі рівня мінімальних показань, а при низьких рівнях сигналу, що приймається, добиваються появи на індикаторі рівня максимальних показань. При цьому обертання котушки з феромагнітним сердечником пошукового пристрою до появи мінімальних показань індикатора рівня, що приймається пошуковим пристроєм сигналу, є переважним. При цьому вимірюють три кути повороту подовжніх осей котушок з феромагнітним сердечником пошукових пристроїв відносно деякого відомого напрямку, наприклад, на Північ магнітного поля Землі. У загальному ви 9 падку ці виміряні кути повороту не дорівнюють дійсним азимутам об'єкту пошуку, але пов'язані зі взаємною орієнтацією котушки з феромагнітним сердечником радіомаяка об'єкту пошуку і котушок з феромагнітними сердечниками пошукових пристроїв. При цьому для тих пошукових пристроїв, для яких обертання рухливої котушки з феромагнітним сердечником призводило до появи максимуму сигналу, що приймався, до виміряного кута розташування подовжньої осі котушки з феромагнітним сердечником пошукового пристрою додають 90°. При цьому само розташування випромінюючої котушки з феромагнітним сердечником радіомаяка не має значення. Подовжня вісь котушки з феромагнітним сердечником радіомаяка може навіть мати нахил відносно площини проведення рятувальних робіт і, відповідно, до площини обертання котушок з феромагнітними сердечниками пошукових пристроїв. Рівень сигналу, що приймається пошуковими пристроями, при цьому не вимірюється, знаходять тільки мінімум або максимум сигналу, що приймається. При цьому вимірюється куг повороту подовжньої осі котушки з феромагнітним сердечником навколо вісі обертання в кожному пошуковому пристрої відносно деякого відомого напрямку, наприклад, на Північ магнітного поля Землі. Оскільки взаємне розташування всіх трьох пошукових пристроїв відоме, відомі відстані між ними і їх азимути один відносно одного і деякого відомого напрямку, наприклад, на Північ магнітного поля Землі, то по отриманих трьом відносним кутам розташування подовжніх осей котушок з феромагнітними сердечниками пошукових пристроїв вирішують тригонометричну задачу і отримують три дійсні азимути і три дальності об'єкту пошуку від кожного з трьох пошукових пристроїв відповідно. Для проведення рятувальних заходів вибирають той азимут і ту відстань до об'єкту пошуку від того пошукового пристрою, від якого вживати ці рятувальні заходи найефективніше. Вказаний спосіб пошуку постраждалих під завалами можна реалізувати за допомогою пристрою, приведеного на фіг. 1. Пристрій пошуку постраждалих під завалами складається з пристрою активації, радіомаяка і пристроїв пошуку і містить генератори низькочастотних коливань 1 і 2, нерухомі котушки з феромагнітними сердечниками 3, 4 і 5 рухливих котушок з феромагнітними сердечниками 6, 7 і 8, вузькосмугові підсилювачі низькочастотних сигналів 9, 10, 11 і 12, випрямлячі 13, 14, 15 і 16, пороговий пристрій 17, індикатори рівня 18, 19 і 20, вимірювачі кута повороту подовжніх осей котушок з феромагнітним сердечником пошукових пристроїв навколо їх осей обертання відносно деякого відомого напрямку, наприклад на Північ магнітного поля Землі 21, 22 і 23. При цьому генератор низькочастотних коливань 1 і нерухома котушка з феромагнітним сердечникам 3 складають пристрій активації радіомаяків. При цьому нерухомі котушки з феромагнітними сердечниками 4 і 5, вузькосмуговий підсилювач низькочастотних сигналів 9, випрямляч 13, пороговий пристрій 17 і генератор низькочастотних коливань 2 складають радіомаяк. 87642 10 При цьому рухлива котушка з феромагнітним сердечником 6, вузькосмуговий підсилювач низькочастотних сигналів 10, випрямляч 14, індикатор рівня 18 і вимірювач 21 кута повороту подовжньої осі котушки з феромагнітним сердечником навколо її осі обертання відносно деякого відомого напрямку, наприклад, на Північ магнітного поля Землі складають перший пошуковий пристрій. При цьому рухлива котушка з феромагнітним сердечником 7, вузькосмуговий підсилювач низькочастотних сигналів 11, випрямляч 15, індикатор рівня 19 і вимірювач 22 кута повороту подовжньої осі котушки з феромагнітним сердечником навколо її осі обертання відносно деякого відомого напрямку, наприклад на Північ магнітного поля Землі, складають другий пошуковий пристрій. При цьому рухлива котушка з феромагнітним сердечником 8, вузькосмуговий підсилювач низькочастотних сигналів 12, випрямляч 16, індикатор рівня 20 і вимірювач 23 кута повороту подовжньої осі котушки з феромагнітним сердечником навколо її осі обертання відносно деякого відомого напрямку, наприклад, на Північ магнітного поля Землі , складають третій пошуковий пристрій. При цьому вихід генератора низькочастотних коливань 1 з'єднаний з виводами нерухомої котушки з феромагнітним сердечником 3, виводи нерухомої котушки з феромагнітним сердечником 4 з'єднані з входом вузькосмугового підсилювача низькочастотних сигналів 9, вихід якого з'єднаний з входом випрямляча 13, вихід якого з'єднаний з входом порогового пристрою 17, вихід якого з'єднаний з входом управління низькочастотного генератора 2, вихід якого з'єднаний з виводами нерухомої котушки з феромагнітним сердечником 5, при цьому виводи рухливої котушки з феромагнітним сердечником 6 з'єднані з входом вузькосмугового підсилювача низькочастотних сигналів 10, а вісь обертання котушки з феромагнітним сердечником 6 з'єднана з вимірювачем 21 кута повороту подовжньої осі котушки з феромагнітним сердечником навколо цієї осі обертання відносно деякого відомого напрямку, наприклад, на Північ магнітного поля Землі, при цьому виводи рухливої котушки з феромагнітним сердечником 7 з'єднані з входом вузькосмугового підсилювача низькочастотних сигналів 11, а вісь обертання котушки з феромагнітним сердечником 7 з'єднана з вимірювачем 22 кута повороту подовжньої осі котушки з феромагнітним сердечником навколо цієї осі обертання відносно деякого відомого напрямку, наприклад, на Північ магнітного поля Землі, при цьому виводи рухливої котушки з феромагнітним сердечником 8 з'єднані з входом вузько смугового підсилювача низькочастотних сигналів 12, а вісь обертання котушки з феромагнітним сердечником 8 з'єднана з вимірювачем 23 кута повороту подовжньої осі котушки з феромагнітним сердечником навколо цієї осі обертання відносно деякого відомого напрямку, наприклад, на Північ магнітного поля Землі, при цьому вихід вузькосмугового підсилювача низькочастотних сигналів 10 з'єднаний з входом випрямляча 14, при цьому вихід вузькосмугового підсилювача низькочастотних сигналів 11 з'єднаний з входом випрямляча 15, при цьому вихід вузько 11 смугового підсилювача низькочастотних сигналів 12 з'єднаний з входом випрямляча 16, при цьому вихід випрямляча 14 з'єднаний з входом індикатора рівня 18, при цьому вихід випрямляча 15 з'єднаний з входом індикатора рівня 19, при цьому вихід випрямляча 16 з'єднаний з входом індикатора рівня 20. Працює пристрій, що реалізовує спосіб пошуку постраждалих під завалами, таким чином. Генератор низькочастотних коливань 1 формує низькочастотні коливання з частотою f1 необхідної потужності, які збуджують за допомогою нерухомої котушки з феромагнітним сердечником 3 змінне низькочастотне магнітне поле з частотою f1. Це змінне низькочастотне магнітне поле уловлюють нерухомою котушкою з феромагнітним сердечником 4, яка входить до складу радіомаяка. Сигнал з виводів цієї нерухомої котушки з феромагнітним сердечником 4 подають на вхід вузькосмугового підсилювача низькочастотних сигналів 9, який також входить до складу радіомаяка, де прийнятий сигнал підсилюють у вузькій смузі частот, відокремлюючи його від індустріальних завад, і подають на випрямляч 13, що входить до складу радіомаяка. Випрямлений сигнал подають на вхід порогового пристрою 17, що входить до складу радіомаяка. При перевищенні прийнятим, посиленим і випрямленим сигналом деякого порогового рівня пороговий пристрій спрацьовує і вмикає генератор безперервних низькочастотних коливань 2, що входить до складу радіомаяка. Цей генератор безперервних низькочастотних коливань збуджує за допомогою нерухомої котушки з феромагнітним сердечником 5, що входить до складу радіомаяка, змінне низькочастотне магнітне поле з частотою f2 потрібної інтенсивності. Це змінне низькочастотне магнітне поле з частотою f2 уловлюють рухливими котушками з феромагнітними сердечниками 6, 7 і 8, що входять до складу трьох пошукових пристроїв. Сигнал, наведений на виводах приймальної рухливої котушки з феромагнітним сердечником пошукового пристрою, пов'язаний з кутом повороту подовжньої осі цієї котушки з феромагнітним сердечником відносно подовжньої осі розташування котушки з феромагнітним сердечником радіомаяка об'єкту пошуку. Якщо провести лінію, що проходить через пошуковий пристрій і радіомаяк, і при цьому якщо один кут відхилення подовжньої осі котушки з феромагнітним сердечником, наприклад, радіомаяка відносно цієї лінії буде рівний а, а інший кут відхилення подовжньої осі котушки з феромагнітним сердечником, відносно пошукового пристрою , щодо цієї ж лінії буде рівний 180°- a, то в цьому випадку сигнал, що приймається котушкою з феромагнітним сердечником пошукового пристрою, матиме максимальний рівень. З іншого боку сигнал, що приймається котушкою з феромагнітним сердечником пошукового пристрою, матиме мінімальний рівень, якщо один з кутів буде рівний α, а інший буде рівний 90°-a. Сигнали, що приймаються рухливими котушками з феромагнітними сердечниками пошукових пристроїв, мають малий рівень і присутні на тлі індустріальних завад, що мають як магнітне, так і 87642 12 радіочастотне походження. Ці завади в шахтах хоч і мають знижений рівень, але присутні у в будьякому разі. З цієї причини в кожному з пошукових пристроїв проводять вузькосмугове підсилення прийнятого сигналу і відокремлення його від індустріальних завад за допомогою вузько смугових низькочастотних підсилювачів 10, 11 і 12. Для оцінки рівня прийнятого сигналу в пошукових пристроях проводять його випрямлення за допомогою випрямлячів 14, 15 і 16. Прийняті, підсилені і випрямлені сигнали подають на входи індикаторів рівня 18,19 і 20, що входять до складу трьох пошукових пристроїв. Далі здійснюють обертання рухливих котушок з феромагнітними сердечниками пошукових пристроїв в горизонтальній площині навколо вісі, перпендикулярної їх подовжній осі і проводять оцінку рівня сигналу, що приймається, і вимірювання кута повороту подовжньої осі котушки з феромагнітним сердечником відносно деякого відомого напрямку, наприклад, на Північ магнітного поля Землі. При цьому обертанням рухливих котушок з феромагнітними сердечниками пошукових пристроїв добиваються мінімальних або максимальних показань індикаторів рівня сигналів, що приймаються. При цьому точність позиціювання рухливої котушки з феромагнітним сердечником пошукового пристрою по мінімуму сигналу, що приймається, буде вища, ніж точність позиціювання цієї котушки з феромагнітним сердечником за максимумом сигналу, що приймається. Цей факт очевидний внаслідок того, що градієнт рівня сигналу, що наводиться в приймальній котушці з феромагнітним сердечником по куту повороту подовжньої осі цієї котушки відносно подовжньої осі збуджуючої котушки з феромагнітним сердечником, максимальний в області мінімуму сигналу і дорівнює нулю в області максимуму. Проте, є можливим позиціонувати рухливу котушку з феромагнітним сердечником за максимумом сигналу, що приймається, при прийомі сигналів радіомаяків, віддалених на значні відстані. Загальний рівень сигналу від цих маяків досить малий. Якщо при цьому позиціювати котушку з феромагнітним сердечником за мінімумом сигналу, що приймається, то сам цей сигнал, що приймається, може опинитися нижчим за рівень шумів в широкому секторі кутів повороту подовжньої осі рухливої котушки з феромагнітним сердечником пошукового пристрою. Можна при цьому, наприклад, використовувати позиціювання рухливої котушки з феромагнітним сердечником в області максимуму сигналу, що приймається, по дво-точкової рівнорівневій схемі. Точність позиціювання при цьому буде нижча, ніж у разі позиціювання за мінімумом, натомість буде оброблена інформація про місце розташування віддалених радіомаяків, і ці об'єкти пошуку не будуть втрачені. При цьому для тих пошукових пристроїв, для яких обертання рухливої котушки з феромагнітним сердечником проводилося до появи максимуму сигналу, що приймався, до виміряного кута положення подовжньої осі котушки з феромагнітним сердечником пошукового пристрою додають 90°. 13 87642 В результаті отримують три кути повороту подовжніх осей котушок з феромагнітними сердечниками пошукових пристроїв щодо деякого відомого направлення, наприклад, на Північ магнітного поля Землі a1, a2 і a3. Ці три кути в спільному випадку не є азимутами об'єкту пошуку, вони лише мають відношення до розташування подовжньої осі котушки з феромагнітним сердечником радіомаяка об'єкту пошуку. Після того, як отримані кути повороту подовжніх осей рухливих котушок з феромагнітними сердечниками пошукових пристроїв щодо деякого відомого напрямку, наприклад, на Північ магнітного поля Землі, приступають до обчислення дійсних азимутів і дальностей об'єкту пошуку щодо місця розташування кожного з пошукових пристроїв. Для проведення таких обчислень необхідно знати відстані між всіма пошуковими пристроями і азимути від кожного з пошукових пристроїв на два інших пошукових пристрої щодо деякого відомого напрямку, наприклад, на Північ магнітного поля Зем 14 лі. Формули обчислення дійсних азимутів і дальностей об'єкту пошуку досить громіздкі, але це звичайне тригонометричне завдання. Наприклад, якщо для спрощення формул обчислення розташувати всі три пошукові пристрої на одній лінії, яка сходиться з деяким відомим напрямком, наприклад, на Північ магнітного поля Землі, відстані між першим і другим пошуковими пристроями визначити як b1, а відстань між другим і третім пошуковими пристроями визначити як b2, при цьому відстань між першим і третім пошуковими пристроями визначатиметься як b1+b2, то заздалегідь обчислюють проміжні кути φ1, і φ2, визначувані як a - a2 a - a3 j1 = 1 , j2 = 2 . 2 2 Після цього визначають Декартові координати об'єкту пошуку відносно першого пошукового пристрою b1 × tan j2 × étan j2 × (tan j1)2 ×(b1 + b 2 )2 + tan j 2 × (b1 × b 2 + b 2 ) - tan j1 × (b1 × b 2 )ù 2 ú 1 ê û ë x= 2 ×(tan j ) 2 ×(b + b )2 +(b tan j - b tan j )2 (tan j1) 2 1 2 2 1 1 2 y= (b1 + b2 ) × (tan j1 + tan j2 ) × tan j1 × tan j2 × b1 × b2 (tan j1)2 ×(tan j2 )2 ×(b1 + b2 )2 +(b2 tan j1 - b1 tan j2 )2 Після цього визначають полярні координати об'єкту пошуку від кожного з пошукових пристроїв, тобто визначають дальності і дійсні азимути об'єкту пошуку від кожного з пошукових пристроїв. У прийнятій системі координат дійсний азимут відраховується від прямої, що з'єднує все три пошукові пристрої, тобто від напрямку на Північ магнітного поля Землі. Дальності об'єкту пошуку визначають по наступним формулам R1= x 2 + y2 , R2= (b1 - x )2 + y 2, , R3= (b1 + b 2 - x )2 + y 2 , , де, R1, R2 і R3, - дальності об'єкту пошуку від першого, другого і третього пошукових пристроїв відповідно. Дійсні азимути, β1, β2 і β3 об'єкту пошуку відповідно від першого, другого і третього пошукових пристроїв, визначають як æ R2 + b2 -R2 ö ç 2 ÷, 1 β 1=arccos ç 1 ÷ 2 × R1 × b1 ÷ ç ø è β2= β1+j1, β3= β2+j2. Для вжиття рятувальних заходів вибирають той азимут об'єкту пошуку і, відповідно, ту дальність об'єкту пошуку від того з пошукових пристро їв, від якого проводити рятувальні заходи найефективніше. Таким чином, отримують координати об'єкту пошуку: людину, що перебуває під завалом. Народногосподарський ефект від використання передбачуваного винаходу пов'язаний з появою можливості швидко і точно визначити координати людини, що перебуває під завалом гірської породи. При цьому з'являється можливість оперативно вживати рятувальні заходи і забезпечити, тим самим, збереження життя людей, у кращому разі, у найгіршому випадку з'являється можливість відшукати тіла людей, вже загиблих внаслідок аварії. При вживанні рятувальних заходів рухливу котушку з феромагнітним сердечником обертають тільки в одній площині, що істотно спрощує процедуру пошуку і, відповідно, зменшує час пошуку. Коли йдеться про врятуванні життів людей, ця обставина є особливо важливою. Всі обчислювальні процедури визначення дальності і азимута об'єкту пошуку, тобто, людини, що перебуває під завалом гірської породи, виконують в реальному масштабі часу за допомогою обчислювального пристрою Реалізація обчислювального пристрою не є принциповою, сам пристрій може навіть перебувати на поверхні далеко за межами зони аварії. Дані в обчислювальний пристрій вводять при цьому вручну, використовуючи усну передачу інформації і відомі канали зв'язку. 15 Комп’ютерна верстка І. Скворцова 87642 Підписне 16 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for locating miners under mine crump
Автори англійськоюShyrokov Ihor Borysovych
Назва патенту російськоюСпособ поиска пострадавших под завалами
Автори російськоюШироков Игорь Борисович
МПК / Мітки
МПК: A62B 99/00, E21F 11/00, H04B 5/00
Мітки: пошуку, завалами, спосіб, постраждалих
Код посилання
<a href="https://ua.patents.su/8-87642-sposib-poshuku-postrazhdalikh-pid-zavalami.html" target="_blank" rel="follow" title="База патентів України">Спосіб пошуку постраждалих під завалами</a>
Спосіб пошуку постраждалих під завалами
Номер патенту: 86558
Опубліковано: 27.04.2009
Автори: Яуфман Анатолій Іванович, Широков Ігор Борисович
МПК: E21F 11/00, A62B 99/00, H04B 5/00
Мітки: пошуку, завалами, постраждалих, спосіб
Формула / Реферат:
Спосіб пошуку постраждалих під завалами, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній...
Спосіб сумісного пошуку і виявлення радіолокаційних об’єктів
Номер патенту: 71735
Опубліковано: 15.12.2004
Автори: Худов Геннадій Володимирович, Пастушенко Микола Савелійович, Голкін Дмитро Васильович, Коновалов Валерій Михайлович
МПК: G01S 13/04
Мітки: радіолокаційних, пошуку, виявлення, спосіб, сумісного, об'єктів
Формула / Реферат:
1. Спосіб сумісного пошуку і виявлення радіолокаційних об'єктів, у якому формують діаграму направленості радіолокаційної системи, випромінюють зондувальні сигнали, приймають відбиті коливання, фільтрують прийняті коливання, формують пороговий сигнал, величина якого пропорційна елементам матриці втрат за неправильно прийняті рішення, порівнюють сигнал, пропорційний умовному відношенню правдоподібності, із пороговим сигналом, приймають рішення...
Пристрій для пошуку точок акупунктури
Номер патенту: 37791
Опубліковано: 15.05.2001
Автори: Климович Лілія Василівна, Доронін Павло Степанович, Здибський Володимир Іванович, Яворська Валентина Олексіївна
МПК: A61H 39/02
Мітки: пристрій, пошуку, акупунктури, точок
Текст:
...цьому, пошукові елжтроди 1 двома іншими кінцями безпосередньо з'єднані з генератором 5 електричних коливань, до виходу якого підключений звуковий випромінювач 6, причому, генератор 5 і випромінювач 6 живляться від вмонтованого через вимикач 7 джерела живлення 8 з гальванічних елементів. Пристрій працює таким чином. Лікар бере пристрій в руку, вимикач 7 приводить в положення "Увімкнено". При цьому, генератор 5 знаходиться в стані...
Спосіб пошуку даних в пошукових системах
Номер патенту: 33915
Опубліковано: 25.07.2008
Автор: Савчук Олег Леонідович
МПК: G06F 17/30
Мітки: пошуку, пошукових, спосіб, даних, системах
Формула / Реферат:
1. Спосіб пошуку даних в пошукових системах, у якому за допомогою суфіксного, а також префіксного дерева, та дерева приставок і закінчень за допомогою електронних засобів виявляються та вилучаються змінні частини, який відрізняється тим, що за допомогою електронних засобів у незмінних частинах слів текстів документів різних мов, за якими проводиться пошук, та у ключових словах запитів також вилучаються частини, які змінюються у...
Спосіб геолого-геохімічного пошуку нафти і газу
Номер патенту: 62594
Опубліковано: 15.12.2003
Автори: Лилак Микола Миколайович, Ланчинський Віктор Іванович, Окрепкий Ігор Романович, Піта Микола Васильович, Щелінський Михайло Олексійович, Кузьмик Леонтій Мойсейович
МПК: G01V 9/00
Мітки: газу, нафти, пошуку, спосіб, геолого-геохімічного
Формула / Реферат:
Спосіб геолого-геохімічного пошуку нафти і газу, який включає відбір проб порід із приповерхневих відкладів, їх термовакуумну дегазацію, визначення концентрації та ступеня епігенетичності вуглеводневих газів у газоповітряній суміші, вилученої із проб порід, який відрізняється тим, що додатково визначають концентрацію вуглекислого газу і органічного вуглецю у відібраних пробах порід, розраховують ступінь епігенетичності метану, кожного із його...
Попередній патент: Пристрій для біологічної очистки стічних вод
Наступний патент: Спосіб розташування свердловинних зарядів вибухової речовини при відбійці тріщинуватих порід
Випадковий патент: Спосіб запуску і зупинки морського ерліфта та система для його здійснення