Спосіб пошуку постраждалих під завалами і дистанційного контролю їх серцевого ритму
Формула / Реферат
Спосіб пошуку постраждалих під завалами і дистанційного контролю їх серцевого ритму, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній близькості від передбачуваного об'єкта пошуку, при цьому змінне магнітне поле з частотою f1 уловлюють другою нерухомою котушкою з феромагнітним сердечником, яку встановлюють в радіомаяку об'єкта пошуку, після чого сигнал, що знімається з клем другої котушки з феромагнітним сердечником, підсилюють у вузькій смузі частот, випрямляють і оцінюють його рівень, причому при перевищенні випрямленого сигналу постійного струму деякого порогового рівня включають мікрохвильовий датчик серцевого ритму, який також розташовують в радіомаяку в безпосередній близькості від тіла людини, наприклад, усередині коробки акумуляторної батареї шахтарського ліхтаря, яку шахтарі носять на поясі, при цьому мікрохвильову антену орієнтують у напрямі тіла людини, і одночасно при цьому починають генерувати безперервні низькочастотні коливання з частотою f2, які подають на сигнальний вхід амплітудного модулятора, при цьому на модуляційний вхід амплітудного модулятора подають сигнал з виходу мікрохвильового датчика серцевого ритму, при цьому сигнал з виходу амплітудного модулятора подають на клеми третьої нерухомої котушки з феромагнітним сердечником, яку також розташовують в радіомаяку об'єкта пошуку, і випромінюють тим самим змінне магнітне поле з частотою f2, що модулюється періодичним імпульсним сигналом, який є відповідним скороченням серцевого м'яза людини, при цьому змінне магнітне поле з частотою f2 уловлюють четвертою рухливою котушкою з феромагнітним сердечником, яку розташовують в першому пошуковому пристрої, причому це ж змінне магнітне поле з частотою f2 уловлюють п'ятою рухливою котушкою з феромагнітним сердечником, яку розташовують в другому пошуковому пристрої, причому це ж змінне магнітне поле з частотою f2 уловлюють шостою рухливою котушкою з феромагнітним сердечником, яку розташовують в третьому пошуковому пристрої, причому самі пошукові пристрої розташовують один щодо одного на деякій відомій відстані, причому пошукові пристрої розташовують не на одній лінії, при цьому в кожному з трьох пошукових пристроїв проводять вузькосмугове підсилення і випрямлення з великою постійною часу низькочастотних сигналів, що приймаються рухливими котушками, причому в кожному з трьох пошукових пристроїв випрямлений з великою постійною часу сигнал постійного струму подають на вимірник рівня сигналу, при цьому в кожному з трьох пошукових пристроїв обертають рухливі котушки з феромагнітними сердечниками: у першому пошуковому пристрої - четверту котушку, в другому - п'яту, в третьому - шосту, при цьому в кожному з трьох пошукових пристроїв здійснюють вимірювання рівня прийнятого, підсиленого і випрямленого з великою постійною часу низькочастотного сигналу, при цьому добиваються появи в кожному з трьох пошукових пристроїв максимального рівня зміряного сигналу, після чого в кожному з трьох пошукових пристроїв ці зміряні рівні сигналів по калібрувальних номограмах переводять у відстані до об'єкта пошуку, при цьому отримують три відстані до об'єкта пошуку від кожного із трьох пошукових пристроїв, після чого вирішують звичайну тригонометричну задачу, і від кожного з пошукових пристроїв отримують однозначно азимут об'єкта пошуку, при цьому в одному з трьох пошукових пристроїв здійснюють випрямлення з малою постійною часу низькочастотного сигналу, прийнятого його рухливою котушкою і підсиленого його вузькосмуговим підсилювачем, при цьому отримують імпульсний періодичний сигнал, відповідний періодичним скороченням серцевого м'яза людини, який подають на індикатор стану здоров'я людини, при цьому контролюють стан здоров'я людини і використовують один з отриманих азимутів і відстань до об'єкта пошуку для здійснення рятувальних заходів від того пошукового пристрою, від якого вживати рятувальні заходи найефективніше.
Текст
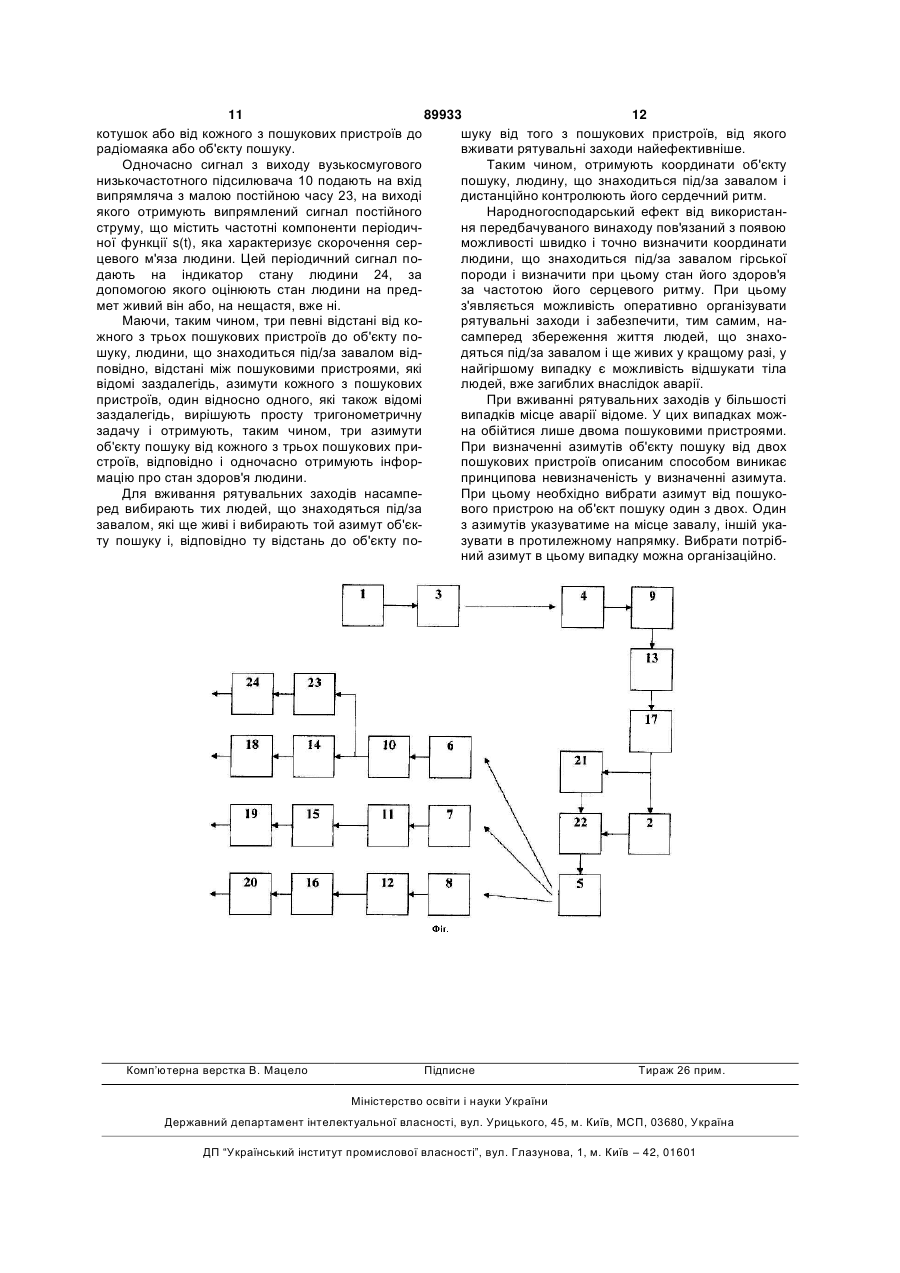
Спосіб пошуку постраждалих під завалами і дистанційного контролю їх серцевого ритму, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f 1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній близькості від передбачуваного об'єкта пошуку, при цьому змінне магнітне поле з частотою f1 уловлюють другою нерухомою котушкою з феромагнітним сердечником, яку встановлюють в радіомаяку об'єкта пошуку, після чого сигнал, що знімається з клем другої котушки з феромагнітним сердечником, підсилюють у вузькій смузі частот, випрямляють і оцінюють його рівень, причому при перевищенні випрямленого сигналу постійного струму деякого порогового рівня включають мікрохвильовий датчик серцевого ритму, який також розташовують в радіомаяку в безпосередній близькості від тіла людини, наприклад, усередині коробки акумуляторної батареї шахтарського ліхтаря, яку шахтарі носять на поясі, при цьому мікрохвильову антену орієнтують у напрямі тіла людини, і одночасно при цьому починають генерувати безперервні низькочастотні коливання з частотою f2, які подають на 2 (19) 1 3 89933 4 тані до об'єкта пошуку від кожного із трьох пошуімпульсний періодичний сигнал, відповідний перікових пристроїв, після чого вирішують звичайну одичним скороченням серцевого м'яза людини, тригонометричну задачу, і від кожного з пошукових який подають на індикатор стану здоров'я людини, пристроїв отримують однозначно азимут об'єкта при цьому контролюють стан здоров'я людини і пошуку, при цьому в одному з трьох пошукових використовують один з отриманих азимутів і відспристроїв здійснюють випрямлення з малою постань до об'єкта пошуку для здійснення рятувальтійною часу низькочастотного сигналу, прийнятого них заходів від того пошукового пристрою, від якойого рухливою котушкою і підсиленого його вузьго вживати рятувальні заходи найефективніше. космуговим підсилювачем, при цьому отримують Винахід належить до області забезпечення безпеки робіт в гірничій промисловості і може використовуватися для пошуку і дистанційного контролю серцевого ритму персоналу під/за завалами в шахтах. Добре відомі способи визначення серцевого ритму людини, засновані на вимірюванні його електрокардіограм або із застосуванням акустичних засобів вимірювань. Однак дані вимірювання передбачають застосування стаціонарного обладнання і безпосереднього контакту датчиків з тілом людини. При виконанні робіт подібні способи визначення серцевого ритму людини неприйнятні. Існують методи дистанційного контролю серцевого ритму людини, засновані на застосуванні надширокосмугової радіолокації, наприклад «Detection of Human Breathing and Heartbeat by Remote Radar» (у праці конференції «Progress in Electromagnetic Research Symposium», 2004, Pisa, Italy, March 28-31, - pp. 663-669), які передбачають випромінювання мікрохвильового сигналу у напрямку людини і прийом віддзеркаленої хвилі, при цьому віддзеркалена хвиля містить інформацію про періодичні зміни в наповненні кровоносних судин людини. Проте визначити сердечний ритм людини можна в цьому випадку за перешкодою з цеглини 10см завтовшки або біля того. Проконтролювати сердечний ритм людини, що перебуває під/за завалом в цьому випадку не є можливим, зважаючи на дуже велике загасання мікрохвильового сигналу в гірничій породі, товщина якої може досягати декількох метрів або десятків метрів. Найбільш близьким до передбачуваного винаходу є «Спосіб пошуку постраждалих під завалами», описаний в патенті України №86558 опублікований 27.04.2009, бюлетень №8. За цим способом визначення місця розташування персоналу шахти під/за завалами, кожного працівника шахти забезпечують радіомаяком, а пошукову групу забезпечують пристроєм активації радіомаяків і пристроями пошуку. При цьому, до складу пристрою активації вводять: перший генератор першої низької частоти, першу нерухому котушку з феромагнітним сердечником. До складу радіомаяка вводять: нерухомі другу і третю котушки з феромагнітними сердечниками, вузькосмуговий підсилювач першої низької частоти, детектор несучої, пороговий пристрій, другий генератор другої низької частоти. До складу трьох пошукових пристроїв, поодинці в кожен, вводять: рухливі котушки з феромагнітними сердечниками, вузькос мугові підсилювачі сигналів другої низької частоти, випрямлячі, вимірники рівня. За описаним способом за допомогою першого генератора низької частоти формують низькочастотний гармонійний сигнал з першою частотою, який подають на першу нерухому котушку з феромагнітним сердечником. Через цю першу котушку з феромагнітним сердечником випромінюють в простір змінне магнітне поле першої частоти. При цьому першу котушку з феромагнітним сердечником розташовують в безпосередній близькості від передбачуваного об'єкту пошуку. Другою нерухомою котушкою з феромагнітним сердечником радіомаяка це змінне магнітне поле першої частоти уловлюють і потім отриманий низькочастотний гармонійний сигнал з першою частотою підсилюють за допомогою вузькосмугового підсилювача першої низької частоти радіомаяка, після чого підсилений низькочастотний сигнал подають на детектор несучої, де цей сигнал змінного струму випрямляють. Далі випрямлений сигнал подають на пороговий пристрій, де порівнюють напругу випрямленого сигналу з деяким пороговим рівнем і при перевищенні рівня випрямленого сигналу цього порогового рівня включають другий генератор низької частоти, на виході якого формують низькочастотний гармонійний сигнал з другою частотою, який подають на третю нерухому котушку з феромагнітним сердечником. Через цю третю нерухому котушку з феромагнітним сердечником радіомаяка випромінюють в простір змінне магнітне поле другої низької частоти. Причому четвертою рухливою котушкою з феромагнітним сердечником першого пошукового пристрою це змінне магнітне поле другої низької частоти приймають і потім отриманий низькочастотний гармонійний сигнал з другою частотою підсилюють за допомогою першого вузькосмугового підсилювача другої низької частоти першого пошукового пристрою і випрямляють за допомогою першого випрямляча першого пошукового пристрою, після чого випрямлений сигнал постійного струму подають на перший вимірник рівня першого пошукового пристрою. Причому п'ятою рухливою котушкою з феромагнітним сердечником другого пошукового пристрою це змінне магнітне поле другої низької частоти уловлюють і потім отриманий низькочастотний гармонійний сигнал з другою частотою підсилюють за допомогою другого вузькосмугового підсилювача другої низької частоти другого пошуковою пристрою і випрямляють за допомогою другого випрямляча другого пошукового пристрою, після чого випрям 5 89933 6 лений сигнал постійного струму подають на другий ляторної батареї шахтарського ліхтаря, яку шахвимірник рівня другого пошукового пристрою. Притарі носять на поясі, при цьому мікрохвильову анчому шостою рухливою котушкою з феромагнітним тену орієнтують у напрямі тіла людини, і одночассердечником третього пошукового пристрою це но при цьому починають генерувати безперервні змінне магнітне поле другої низької частоти прийнизькочастотні коливання з частотою f2, які подамають і потім отриманий низькочастотний гармоють на сигнальний вхід амплітудного модулятора, нійний сигнал з другою частотою підсилюють за при цьому на модуляційний вхід амплітудного модопомогою третього вузькосмугового підсилювача дулятора подають сигнал з виходу мікрохвильоводругої низької частоти третього пошукового приго датчика серцевого ритму, при цьому сигнал з строю і випрямляють за допомогою третього вивиходу амплітудного модулятора подають на клепрямляча третього пошукового пристрою, після ми третьої нерухомої котушки з феромагнітним чого випрямлений сигнал постійного струму подасердечником, яку також розташовують в радіомаяють на третій вимірник рівня третього пошукового ку об'єкту пошуку, і випромінюють тим самим змінпристрою. не магнітне поле з частотою f2, що модулюється При цьому гармонійні низькочастотні сигнали, періодичним імпульсним сигналом, який є відповіякі виробляють першим і другим низькочастотними дним скороченням серцевого м'яза людини, при генераторами, роблять різними по частоті. Цим цьому змінне магнітне поле з частотою f2 уловлюзабезпечують розв'язку низькочастотних підсилюють четвертою рухливою котушкою з феромагнітвальних трактів радіомаяка і пошукового приним сердечником, яку розташовують в першому строю. При цьому самі пошукові пристрої розтапошуковому пристрої, причому це ж змінне магнітшовують один відносно одного на деякій відомій не поле з частотою f2 уловлюють п'ятою рухливою відстані, причому пошукові пристрої розташовують котушкою з феромагнітним сердечником, яку розне на одній лінії. При цьому обертають рухливі ташовують в другому пошуковому пристрої, прикотушки пошукових пристроїв і добиваються макчому це ж змінне магнітне поле з частотою f2 улосимальних показань вимірників рівня. При цьому влюють шостою рухливою котушкою з вимірюють рівні сигналів, що приймаються, всіма феромагнітним сердечником, яку розташовують в трьома вимірниками всіх трьох пошукових притретьому пошуковому пристрої, причому самі построїв. Далі по виміряних рівнях сигналів і калібрушукові пристрої розташовують один щодо одного вальних номограмах визначають відстані від рана деякій відомій відстані, причому пошукові придіомаяка до кожного з трьох пошукових пристроїв і строї розташовують не на одній лінії, при цьому в далі, вирішуючи звичайну тригонометричну задакожному з трьох пошукових пристроїв проводять чу, визначають азимути радіомаяка від кожного з вузькосмугове підсилення і випрямлення з велитрьох пошукових пристроїв. кою постійною часу, низькочастотних сигналів, що Проте описаний спосіб дозволяє проводити приймаються рухливими котушками, причому в лише пошук людини під/за завалом і не дозволяє кожному з трьох пошукових пристроїв випрямлевизначити стан здоров'я самої людини. ний з великою постійною часу сигнал постійного У той же час украй необхідно при здійсненні струму подають на вимірника рівня сигналу, при рятувальних заходів контролювати стан самої люцьому в кожному з трьох пошукових пристроїв дини на предмет живий він або, на нещастя, вже обертають рухливі котушки з феромагнітними серні. При цьому, насамперед доцільно проводити дечниками: у першому пошуковому пристрої - четрятувальні заходи в тих випадках, коли є надія верту котушку, в другому - п'яту, в третьому - шосврятувати життя людини. ту, при цьому в кожному з трьох пошукових В основу винаходу поставлено завдання випристроїв здійснюють вимірювання рівня прийнязначення азимута і відстані до людини, що знахотого, підсиленого і випрямленого з великою посдиться під/за завалом і поставлено завдання дистійною часу низькочастотного сигналу, при цьому танційного контролю його серцевого ритму. Воно добиваються появи в кожному з трьох пошукових вирішується завдяки тому, що спочатку генерують пристроїв максимального рівня зміряного сигналу, безперервні низькочастотні коливання з частотою після чого в кожному з трьох пошукових пристроїв f1, причому ці коливання подають на клеми першої ці зміряні рівні сигналів по калібрувальних номонерухомої котушки з феромагнітним сердечником і грамах переводять у відстані до об'єкту пошуку, випромінюють тим самим змінне магнітне поле з при цьому отримують три відстані до об'єкту пошучастотою f1, при цьому першу котушку з феромагку від кожного їх трьох пошукових пристроїв, після нітним сердечником розташовують в безпосередчого вирішують звичайну тригонометричну задачу, ній близькості від передбачуваного об'єкту пошуку, і від кожного з пошукових пристроїв отримують при цьому змінне магнітне поле з частотою f 1 улооднозначно азимут об'єкту пошуку, при цьому в влююсь другою нерухомою котушкою з феромагніодному з трьох пошукових пристроїв здійснюють тним сердечником, яку встановлюють в радіомаявипрямлення з малою постійною часу низькочаску об'єкту пошуку, після чого сигнал, що знімається тотного сигналу, прийнятого його рухливою котушз клем другої котушки з феромагнітним сердечникою і підсиленого його вузькосмуговим підсилюваком підсилюють у вузькій смузі частот, випрямлячем, при цьому отримують імпульсний ють і оцінюють його рівень, причому при перевиперіодичний сигнал, відповідний періодичним скощенні випрямленого сигналу постійного струму роченням серцевого м'яза людини, який подають деякого порогового рівня включають мікрохвильона індикатор стану здоров'я людини, при цьому вий датчик серцевого ритму, який також розташоконтролюють стан здоров'я людини і використовувують в радіомаяку в безпосередній близькості від ють один з отриманих азимутів і відстань до об'єктіла людини, наприклад, усередині коробки акумуту пошуку для здійснення рятувальних заходів від 7 89933 8 того пошукового пристрою, від якого вживати рязміряного сигналу для кожного з пошукових притувальні заходи найефективніше. строїв. При цьому азимут об'єкту пошуку не виміПорівняння передбачуваного винаходу з вже рюють, оскільки в ближній зоні випромінюючої ковідомими способами і прототипом показує, що тушки з феромагнітним сердечником цього спосіб, який заявляється, виявляє нові технічні зробити неможливо, оскільки абсолютно неможвластивості, що полягають в можливості одночасливо передбачити, в якому положенні опиниться ного визначення азимута і дальності до людини, випромінююча котушка радіомаяка. При цьому що знаходиться під/за завалом гірських порід, а само положення випромінюючої котушки з феротакож визначення стану його здоров'я. магнітним сердечником радіомаяка не має знаЦі властивості передбачуваного винаходу є чення. Оскільки рівень прийнятого сигналу однозновими, тому що в способі-прототипі через власначно пов'язаний з відстанню до джерела тиві йому недоліки, що полягають в можливості випромінювання відомою залежністю, яку заздалевизначення тільки азимута і дальності об'єкту погідь знімають і запам'ятовують, то по виміряних шуку, встановити стан здоров'я людини не є можрівнях сигналів в кожному з пошукових пристроїв ливим. визначають три відстані до радіомаяка від кожного У запропонованому способі пошуку людей під з трьох пошукових пристроїв відповідно. Оскільки завалами гірських порід кожну людину з числа взаємне розташування всіх трьох пошукових приперсоналу шахти забезпечують радіомаяком, построїв відоме, відомі відстані між ними і їх азимути єднаним з датчиком серцевого ритму. В разі аварії один щодо одного, то по отриманих трьох відстапошук постраждалих здійснює спеціальна група нях від пошукових пристроїв до об'єкту пошуку рятувальників, яку забезпечують пошуковим облавирішують звичайну тригонометричну задачу і днанням, що складається з чотирьох частин. Поотримують три азимути об'єкту пошуку від кожного шукове обладнання складається з пристрою актиз трьох пошукових пристроїв відповідно. Одночасвації радіомаяків і трьох пошукових пристроїв. но в одному з трьох пошукових пристроїв прийняти Пристрій активації призначений для випромінюі підсилений низькочастотний сигнал випрямляють вання змінного магнітного поля з частотою f 1, з малою постійною часу, внаслідок чого на виході складається з генератора безперервних низькочавипрямляча отримують імпульсний періодичний стотних коливань з частотою f1 необхідної потужсигнал, який відповідає скороченням серцевого ності і нерухомої котушки з феромагнітним сердем'яза людини, сигнал радіомаяка якого приймачником. Розташовують пристрій активації в ють. безпосередній близькості від місця проведення При проведенні рятувальних заходів спочатку рятувальних заходів. Потужність випромінювання визначають азимути і дальності всіх людей, що змінного магнітного поля має бути достатньою для знаходяться під/за завалом і при цьому визначатого, щоб це змінне магнітне поле можна було б ють стани здоров'я цих людей. Далі для пошуку прийняти радіомаяками, що перебувають в зоні вибирають насамперед тих людей, які ще живі, проведення рятувальних заходів. У кожному з равідповідно вибирають ті азимути і ті відстані до діомаяків це змінне магнітне поле приймають, підоб'єктів пошуку від тих пошукових пристроїв, від силюють і оцінюють його рівень. При перевищенні якого здійснювати ці рятувальні заходи найефекцього рівня деякого порогового значення в радіотивніше. маяку включають мікрохвильовий датчик серцевоВказаний спосіб пошуку постраждалих під заго ритму, який розташовують в радіомаяку в безвалами і дистанційного контролю їх серцевого рипосередній близькості від тіла людини, і тму можна реалізувати за допомогою пристрою, включають генератор безперервних низькочастотприведеного на Фіг.1. них коливань з частотою f2, тобто здійснюють акПристрій пошуку постраждалих під завалами і тивацію радіомаяка. Ці низькочастотні коливання дистанційного контролю їх серцевого ритму склаподають на сигнальний вхід амплітудного модулядається з пристрою активації, радіомаяка, поєднатора. На модуляційний вхід амплітудного модуляного з мікрохвильовим датчиком серцевого ритму, тора подають сигнал з виходу мікрохвильового і пристроїв пошуку і містить генератори низькочасдатчика серцевого ритму. Сигнал з виходу амплітотних коливань 1 і 2, нерухомі котушки з фероматудного модулятора подають на клеми нерухомої гнітними сердечниками 3, 4 і 5, рухливі котушки з котушки з феромагнітним сердечником, яку розферомагнітними сердечниками 6, 7 і 8, вузькосмуташовують в радіомаяку, і випромінюють тим сагові підсилювачі низькочастотних сигналів 9, 10, 11 мим змінне магнітне поле з частотою f2, модульоі 12, випрямлячі з великою постійною часу 13, 14, ване періодичним імпульсним сигналом, який 15 і 16, пороговий пристрій 17, вимірники рівня 18, відповідає скороченням серцевого м'яза людини. 19 і 20, мікрохвильовий датчик серцевого ритму Це змінне магнітне поле з частотою f2 уловлюють 21, амплітудний модулятор 22, випрямляч з малою трьома рухливими котушками з феромагнітними постійною часу 23, індикатор стану здоров'я людисердечниками трьох пошукових пристроїв, в кожни 24. ному своєю котушкою. Прийняті пошуковими приВихід генератора низькочастотних коливань 1 строями сигнали підсилюють у вузькій смузі часз'єднаний з виводами нерухомої котушки з феротот, випрямляють з великою постійною часу і магнітним сердечником 3, виводи нерухомої котуподають на вимірники рівня кожного з пошукових шки з феромагнітним сердечником 4 з'єднані з пристроїв. Далі здійснюють обертання рухливих входом вузькосмугового підсилювача низькочастокотушок пошукових пристроїв і вимірюють рівень тних сигналів 9, вихід якого з'єднаний зі входом сигналу, що приймається, при цьому обертанням випрямляча 13, вихід якого з'єднаний зі входом котушок добиваються появи максимального рівня порогового пристрою 17, вихід якого з'єднаний зі 9 89933 10 входом управління низькочастотного генератора 2 тора, на модуляційний вхід якого поступає сигнал і зі входом управління мікрохвильового датчика з мікрохвильового датчика серцевого ритму. Ампсерцевого ритму 21, причому вихід низькочастотлітудний модулятор збуджує за допомогою неруного генератора 2 з'єднаний з сигнальним входом хомої котушки з феромагнітним сердечником 5, що амплітудного модулятора 22, а вихід мікрохвильовходить до складу радіомаяка, змінне низькочасвого датчика серцевого ритму 21 з'єднаний з мототне магнітне поле з частотою f2 заданої інтенсидуляційним входом амплітудного модуля гора 22, вності, модульоване періодичним сигналом, який при цьому вихід амплітудного модулятора 22 з'єдвідповідає скороченню серцевого м'яза людини. наний з виводами нерухомої котушки з феромагніЦе змінне низькочастотне магнітне поле з частотним сердечником 5, при цьому виводи рухомої тою f2 уловлюють рухомими котушками з феромакотушки з феромагнітним сердечником 6 з'єднані гнітними сердечниками 6, 7 і 8, що входять до зі входом вузькосмугового підсилювача низькочасскладу трьох пошукових пристроїв. Сигнал, наветотних сигналів 10, при цьому виводи рухомої кодений на виводах і-тої приймальної рухомої котутушки з феромагнітним сердечником 7 з'єднані зі шки з феромагнітним сердечником однозначно входом вузькосмугового підсилювача низькочастопов'язаний з відстанями між приймальною і перетних сигналів 11, при цьому виводи рухомої котушдавальною котушками такою залежністю ки з феромагнітним сердечником 8 з'єднані зі вхоK Ui t 1 k AM s t sin 2 f 2 t 0 дом вузькосмугового підсилювача низькочастотних K L3 , сигналів 12, при цьому вихід вузькосмугового підде L - відстань між котушками, м; силювача низькочастотних сигналів 10 з'єднаний зі К - коефіцієнт пропорційності, що має розмірвходом випрямляча з великою постійною часу 14, ність В·м3, залежний від амплітуди напруги збупри цьому вихід вузькосмугового підсилювача нидження котушки, що передає, частоти збудження, зькочастотних сигналів 11 з'єднаний зі входом вичисла витків обох котушок, їх діаметру, довжини і прямляча з великою постійною часу 15, при цьому проникності феромагнітних сердечників; вихід вузькосмугового підсилювача низькочастотφ0 - початкова фаза низькочастотних колиних сигналів 12 з'єднаний зі входом випрямляча з вань; великою постійною часу 16, при цьому вихід виkAM - коефіцієнт, що характеризує глибину ампрямляча з великою постійною часу 14 з'єднаний з плітудної модуляції; входом вимірника рівня 18, при цьому вихід виs(t) - періодична функція, яка характеризує прямляча з великою постійною часу 15 з'єднаний з скорочення серцевого м'яза людини. входом вимірника рівня 19, при цьому вихід виПриведена формула справедлива за умови, прямляча з великою постійною часу 16 з'єднаний з коли котушки мають максимальний коефіцієнт входом вимірника рівня 20, при цьому вихід підсивзаємної індукції. З цієї причини треба здійснити лювача низькочастотних сигналів 10 з'єднаний з орієнтацію рухомої котушки пошукової станції так, входом випрямляча з малою постійною часу 23, а щоб прийнятий сигнал мав максимальний рівень. вихід випрямляча з малою постійною часу 23 з'єдЦей сигнал мае малий рівень і присутній на тлі наний з входом індикатора стану здоров'я людини індустріальних завад, що мають як магнітну, так і 24. радіочастотну природи. Ці завади в шахтах хоч і Працює пристрій, що реалізує спосіб пошуку мають знижений рівень, але присутні у будь-якому постраждалих під завалами і дистанційного контвипадку. ролю їх серцевого ритму, таким чином. З цієї причини в кожній з пошукових станцій Генератор низькочастотних коливань 1 форздійснюють вузькосмуговое підсилення прийнятого мує низькочастотні коливання з частотою f 1 необсигналу і відокремлення його від індустріальних хідної потужності, які збуджують за допомогою завад за допомогою вузькосмугових низькочастотнерухомої котушки з феромагнітним сердечником них підсилювачів 10, 11 і 12, що входять до складу 3 змінне низькочастотне магнітне поле з частотою трьох пошукових пристроїв. f1. Це змінне низькочастотне магнітне поле уловДля вимірювання рівня прийнятого сигналу в люють нерухомою котушкою з феромагнітним сепошукових станціях здійснюють його випрямляння рдечником 4, яка входить до складу радіомаяка. за допомогою випрямлячів з великою постійною Сигнал з виводів цієї нерухомої котушки з феромачасу 14, 15 і 16, що входять до складу трьох пошугнітним сердечником 4 подають на вхід вузькосмукових пристроїв. Велика постійна часу випрямлягового підсилювача низькочастотних сигналів 9, чів дозволяє отримати на їх виході сигнал постійякий також входить до складу радіомаяка, де приного струму, що не містить частотних компонент йнятий сигнал підсилюють у вузькій смузі частот, періодичної функції s(t). відокремлюючи його від індустріальних завад, і Прийняті, підсилені і випрямлені сигнали поподають на випрямляч 13, що входить до складу дають на входи вимірювачів рівня 18, 19 і 20, що радіомаяка. Випрямлений сигнал подають на вхід входять до складу трьох пошукових пристроїв. порогового пристрою 17, що входить до складу Далі здійснюють обертання рухомих котушок радіомаяка. При перевищенні прийнятого, підсипошукових пристроїв і вимірювання рівнів сигналів, леного і випрямленого сигналу деякого порогового що приймаються. При цьому обертанням рухомих рівня пороговий пристрій спрацьовує і включає котушок добиваються максимальних показань вимікрохвильовий датчик серцевого ритму і одночамірювачів рівня сигналів, що приймаються. Після сно включає генератор безперервних низькочастого, як отримані максимальні значення виміряних тотних коливань 2, які обидва входять до складу рівнів прийнятих сигналів за відповідними номорадіомаяка. Сигнал низькочастотного генератора грамами визначають відстані від кожної з рухомих поступає на сигнальний вхід амплітудного модуля 11 89933 12 котушок або від кожного з пошукових пристроїв до шуку від того з пошукових пристроїв, від якого радіомаяка або об'єкту пошуку. вживати рятувальні заходи найефективніше. Одночасно сигнал з виходу вузькосмугового Таким чином, отримують координати об'єкту низькочастотного підсилювача 10 подають на вхід пошуку, людину, що знаходиться під/за завалом і випрямляча з малою постійною часу 23, на виході дистанційно контролюють його сердечний ритм. якого отримують випрямлений сигнал постійного Народногосподарський ефект від використанструму, що містить частотні компоненти періодичня передбачуваного винаходу пов'язаний з появою ної функції s(t), яка характеризує скорочення серможливості швидко і точно визначити координати цевого м'яза людини. Цей періодичний сигнал полюдини, що знаходиться під/за завалом гірської дають на індикатор стану людини 24, за породи і визначити при цьому стан його здоров'я допомогою якого оцінюють стан людини на предза частотою його серцевого ритму. При цьому мет живий він або, на нещастя, вже ні. з'являється можливість оперативно організувати Маючи, таким чином, три певні відстані від корятувальні заходи і забезпечити, тим самим, нажного з трьох пошукових пристроїв до об'єкту посамперед збереження життя людей, що знахошуку, людини, що знаходиться під/за завалом віддяться під/за завалом і ще живих у кращому разі, у повідно, відстані між пошуковими пристроями, які найгіршому випадку є можливість відшукати тіла відомі заздалегідь, азимути кожного з пошукових людей, вже загиблих внаслідок аварії. пристроїв, один відносно одного, які також відомі При вживанні рятувальних заходів у більшості заздалегідь, вирішують просту тригонометричну випадків місце аварії відоме. У цих випадках можзадачу і отримують, таким чином, три азимути на обійтися лише двома пошуковими пристроями. об'єкту пошуку від кожного з трьох пошукових приПри визначенні азимутів об'єкту пошуку від двох строїв, відповідно і одночасно отримують інфорпошукових пристроїв описаним способом виникає мацію про стан здоров'я людини. принципова невизначеність у визначенні азимута. Для вживання рятувальних заходів насампеПри цьому необхідно вибрати азимут від пошукоред вибирають тих людей, що знаходяться під/за вого пристрою на об'єкт пошуку один з двох. Один завалом, які ще живі і вибирають той азимут об'єкз азимутів указуватиме на місце завалу, іншій укату пошуку і, відповідно ту відстань до об'єкту позувати в протилежному напрямку. Вибрати потрібний азимут в цьому випадку можна організаційно. Комп’ютерна верстка В. Мацело Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюTechnique for searching for miners under crump and distant control of their heart rhythm
Автори англійськоюShyrokov Ihor Borysovych
Назва патенту російськоюСпособ поиска пострадавших под завалами и дистанционного контроля их сердечного ритма
Автори російськоюШироков Игорь Борисович
МПК / Мітки
МПК: A62B 33/00, E21F 11/00, H04B 5/00
Мітки: контролю, завалами, ритму, постраждалих, спосіб, пошуку, дистанційного, серцевого
Код посилання
<a href="https://ua.patents.su/6-89933-sposib-poshuku-postrazhdalikh-pid-zavalami-i-distancijjnogo-kontrolyu-kh-sercevogo-ritmu.html" target="_blank" rel="follow" title="База патентів України">Спосіб пошуку постраждалих під завалами і дистанційного контролю їх серцевого ритму</a>
Спосіб пошуку постраждалих під завалами
Номер патенту: 87642
Опубліковано: 27.07.2009
Автор: Широков Ігор Борисович
МПК: E21F 11/00, H04B 5/00, A62B 99/00
Мітки: спосіб, завалами, постраждалих, пошуку
Формула / Реферат:
Спосіб пошуку постраждалих під завалами, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній...
Спосіб пошуку постраждалих під завалами
Номер патенту: 86558
Опубліковано: 27.04.2009
Автори: Яуфман Анатолій Іванович, Широков Ігор Борисович
МПК: A62B 99/00, E21F 11/00, H04B 5/00
Мітки: спосіб, пошуку, постраждалих, завалами
Формула / Реферат:
Спосіб пошуку постраждалих під завалами, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній...
Спосіб лікування вертеброгенних порушень серцевого ритму
Номер патенту: 42136
Опубліковано: 25.06.2009
Автори: Колісник Петро Федорович, Кравець Ростислав Анатолійович
МПК: A61M 31/00
Мітки: вертеброгенних, порушень, серцевого, лікування, спосіб, ритму
Формула / Реферат:
Спосіб лікування вертеброгенних порушень серцевого ритму, що включає мануальну корекцію порушень в хребтових сегментах, який відрізняється тим, що здійснюють комплексне обстеження серцево-судинної системи та хребтових сегментів одночасно і при виявленні вертеброгенної аритмії проводять гідрокортизон-новокаїнові інфільтрації сегментів шийно-грудного відділу хребта і тригерних пунктів.
Спосіб аналізу серцевого ритму

Номер патенту: 42528
Опубліковано: 15.10.2001
Автори: Чегодар Марина Анатоліївна, Чегодар Денис Володимирович, Чегодар Анатолій Якович, Чирський Микола Вікторович
МПК: A61B 8/02
Мітки: серцевого, ритму, аналізу, спосіб
Формула / Реферат:
Спосіб аналізу серцевого ритму, який включає реєстрацію ста кардіоінтервалів, який відрізняється тим, що здісйнюють реєстрацію кардіоінтервалів за допомогою реографа, по вершинам одержаних диференціальних реограм розраховують тривалість кожного серцевого циклу, а потім індекс напруги.
Спосіб оцінки варіабельності серцевого ритму у юнаків
Номер патенту: 42359
Опубліковано: 25.06.2009
Автори: Мацієвська Наталія Костянтинівна, Сенаторова Ганна Сергіївна
МПК: A61B 10/00
Мітки: юнаків, серцевого, варіабельності, оцінки, ритму, спосіб
Формула / Реферат:
Спосіб оцінки варіабельності серцевого ритму, який включає визначення спектральних показників при різних позиціях пацієнта, який відрізняється тим, що у юнаків показники варіабельності серцевого ритму вимірюють при ортопробі, додатково визначають величину співвідношення LF/HF і, якщо її значення знаходиться в границях 1,9-3,7 - констатують норму серцевого ритму; при значенні LF/HF 0,1-1,9 - констатують підвищення серцевого ритму; при значенні...
Попередній патент: Спосіб заживлення ран на деревах
Наступний патент: Електроізоляційний склослюдинітовий матеріал
Випадковий патент: Випарний кондиціонер