Спосіб пошуку постраждалих під завалами
Номер патенту: 86558
Опубліковано: 27.04.2009
Формула / Реферат
Спосіб пошуку постраждалих під завалами, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній близькості від передбачуваного об'єкта пошуку, при цьому змінне магнітне поле з частотою f1 уловлюють другою нерухомою котушкою з феромагнітним сердечником, яку встановлюють у радіомаяку об'єкта пошуку, після чого сигнал, що знімається з клем другої котушки з феромагнітним сердечником, підсилюють у вузькій смузі частот, випрямляють і оцінюють його рівень, причому при перевищенні випрямленим сигналом постійного струму деякого порогового рівня починають генерувати безперервні низькочастотні коливання з частотою f2, які подають на клеми третьої нерухомої котушки з феромагнітним сердечником, яку також розташовують у радіомаяку об'єкта пошуку, і випромінюють тим самим змінне магнітне поле з частотою f2, при цьому змінне магнітне поле з частотою f2 уловлюють четвертою рухомою котушкою з феромагнітним сердечником, яку розташовують в першому пошуковому пристрої, причому це ж змінне магнітне поле з частотою f2 уловлюють п'ятою рухомою котушкою з феромагнітним сердечником, яку розташовують в другому пошуковому пристрої, причому це ж змінне магнітне поле з частотою f2 уловлюють шостою рухомою котушкою з феромагнітним сердечником, яку розташовують в третьому пошуковому пристрої, причому самі пошукові пристрої розташовують один відносно одного на деякій відомій відстані, причому пошукові пристрої розташовують не на одній лінії, при цьому в кожному з трьох пошукових пристроїв здійснюють вузькосмугове підсилення і випрямлення низькочастотних сигналів, що приймаються рухомими котушками, причому в кожному з трьох пошукових пристроїв випрямлений сигнал постійного струму подають на вимірювачі рівня сигналу, при цьому в кожному з трьох пошукових пристроїв обертають рухомі котушки з феромагнітними сердечниками: у першому пошуковому пристрої - четверту котушку, в другому - п'яту, в третьому - шосту, при цьому в кожному з трьох пошукових пристроїв здійснюють вимірювання рівня прийнятого, підсиленого і випрямленого низькочастотного сигналу, при цьому добиваються появи в кожному з трьох пошукових пристроїв максимального рівня виміряного сигналу, після чого в кожному із трьох пошукових пристроїв ці виміряні рівні сигналів за калібрувальними номограмами переводять у відстані до об'єкта пошуку, при цьому отримують три відстані до об'єкта пошуку від кожного із трьох пошукових пристроїв, після чого вирішують звичайну тригонометричну задачу і від кожного з пошукових пристроїв отримують однозначно азимут об'єкта пошуку, при цьому використовують один з отриманих азимутів і відстань до об'єкта пошуку для здійснення рятувальних заходів від того пошукового пристрою, від якого здійснювати рятувальні заходи найефективніше.
Текст
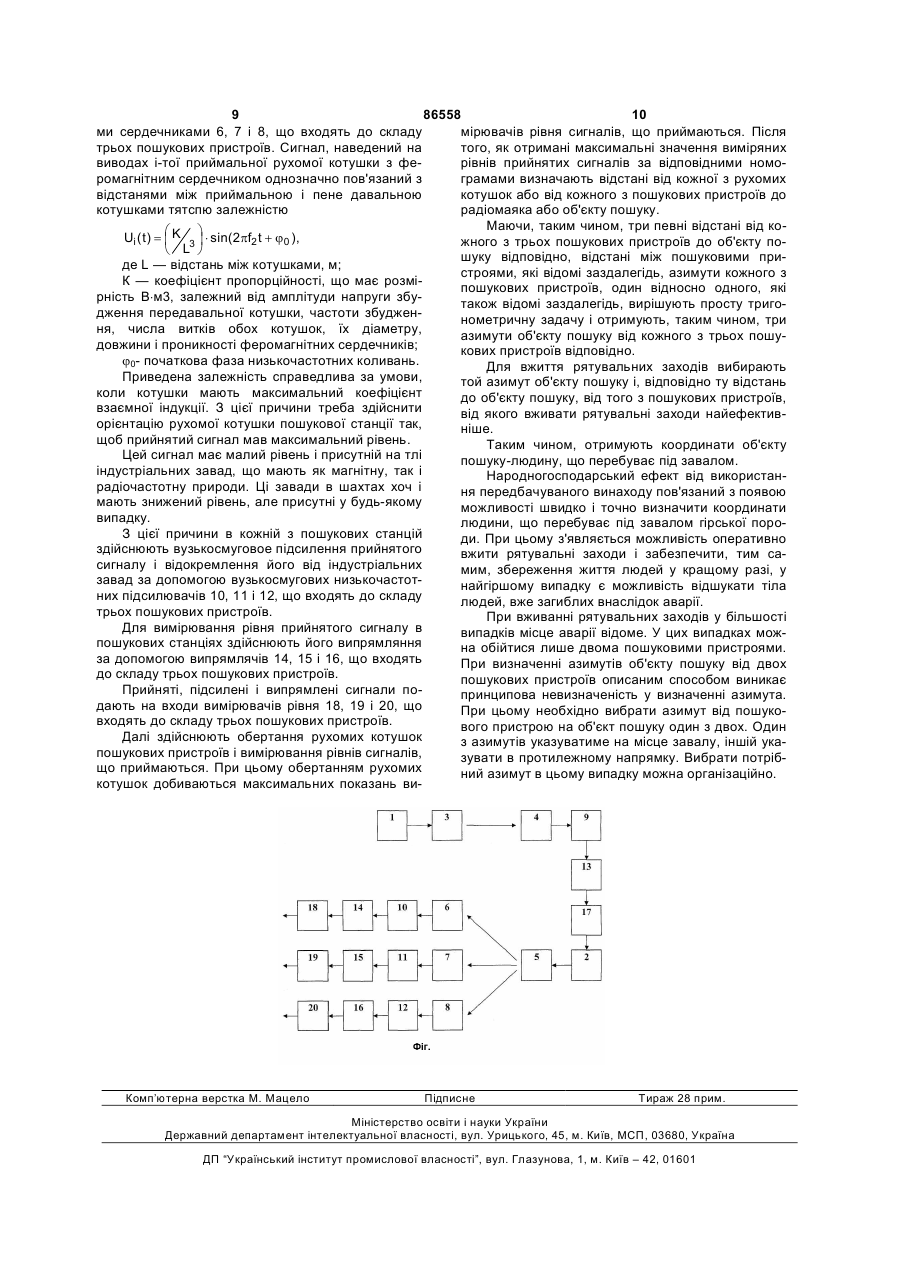
Спосіб пошуку постраждалих під завалами, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній близькості від передбачуваного об'єкта пошуку, при цьому змінне магнітне поле з частотою f1 уловлюють другою нерухомою котушкою з феромагнітним сердечником, яку встановлюють у радіомаяку об'єкта пошуку, після чого сигнал, що знімається з клем другої котушки з феромагнітним сердечником, підсилюють у вузькій смузі частот, випрямляють і оцінюють його рівень, причому при перевищенні випрямленим сигналом постійного струму деякого порогового рівня починають генерувати безперервні низькочастотні коливання з частотою f2, які подають на клеми третьої нерухомої котушки з 2 (19) 1 3 Винахід належить до області забезпечення безпеки робіт в гірничій промисловості і може використовуватися для визначення місця розташування персоналу під завалами в шахтах. Відомі способи автоматизованого визначення місця розташування персоналу, наприклад: «Уніфікована телекомунікаційна система УТАС» яка містить кабель, сервер системи позиціювання, програмне забезпечення системи [У книзі «Способи і засоби створення безпечних і здорових умов праці у вугільних шахтах», збірка наукової праці МАКНДІ Макіївка, 2005 р. — сс. 323-333] або «Система автоматизованого табельного обліку і визначення місця розташування персоналу і техніки на шахтах і копальнях в комплексі «ТАЛНАХ», яка містить: контролери, зчитувачі системи позиціювання, випромінюючий кабель, сервер системи позиціювання, програмне забезпечення системи [У журналі «Устаткування для підприємств ПЕК» №8, М., 2006 р., опубл. 10.08.2006]. Проте позиціювання об'єктів (персоналу і транспортних засобів) у цих системах здійснюється з точністю, обумовленою дискретністю установки зчитувачів системи позиціювання і реально складає 100 - 200м. Крім того, система працює лише в межах прямої видимості об'єкту позиціювання і зчитувача і практично непридатна в разі виникнення обвалу гірської породи, що є непереборною перешкодою для радіосигналів з прийнятими в описаних системах довжинами хвиль. К найбільш близьким до передбачуваного винаходу відноситься «Метод пошуку постраждалих при стихійних лихах», описаний в Матеріалах 14-ої Міжнародної Кримської Мікрохвильової Конференції Криміко'2004, 13-17 Вересня, 2004, Севастополь, Україна- сс. 713-714. За цим способом визначення місця розташування персоналу шахти під завалами, кожного працівника шахти забезпечують радіомаяками, а пошукову групу забезпечують пристроєм пошуку. При цьому, до складу пошукового приладу вводять: перший генератор низької частоти, першу нерухому магнітну антену, вузькосмуговий приймач другої низької частоти, індикатор і четверту магнітну антену, що обертається в горизонтальній площині, яку забезпечують пристроєм прочитування її положення. До складу радіомаяка вводять: нерухомі другу і третю магнітні антени, вузькосмуговий підсилювач першої низької частоти, детектор несучої, пороговий пристрій, другий генератор низької частоти. За описаним способом за допомогою першого генератора низької частоти формують низькочастотний гармонійний сигнал із першою частотою, який подають на першу магнітну антену. Через цю першу магнітну антену випромінюють в простір першу низькочастотну радіохвилю. Другою магнітною антеною цю першу низькочастотну радіохвилю приймають і потім отриманий низькочастотний гармонійний сигнал з першою частотою підсилюють ja допомогою вузькосмугового підсилювача, після чого підсилений низькочастотний сигнал подають на детектор несучої, де цей сигнал змінного струму випрямляють. Далі випрямлений сигнал 86558 4 подають на пороговий пристрій, де порівнюють напругу випрямленого сигналу з деяким пороговим рівнем, і при перевищенні рівня випрямленого сигналу цього порогового рівня включають другий генератор низької частоти, на виході якого формують низькочастотний гармонійний сигнал із другою частотою, який подають на третю магнітну антену. Через цю третю магнітну антену випромінюють в простір другу низькочастотну радіохвилю. Четвертою рухливою магнітною антеною цю другу низькочастотну радіохвилю приймають і потім отриманий низькочастотний гармонійний сигнал із другою частотою підсилюють і випрямляють за допомогою вузькосмугового приймача другої низької частоти, після чого випрямлений сигнал постійного струму подають на індикатор. При цьому гармонійні низькочастотні сигнали, які виробляють першим і другим низькочастотними генераторами, роблять різними за частотою. Цим забезпечують розв'язку низькочастотних підсилювальних трактів радіомаяка і пошукового пристрою. Оскільки діаграма спрямованості магнітної антени має форму «вісімки», то, обертаючи четверту магнітну антену в горизонтальній площині, по мінімуму сигналу, що приймається цією антеною, який оцінюють по індикатору, вимірюють напрям надходження другої низькочастотної радіохвилі від радіомаяка, визначаючи тим самим азимут об'єкту пошуку. Проте описаний спосіб пошуку людей під завалами має низку істотних недоліків, що не дозволяють використовувати цей спосіб на практиці. По-перше, пошукова антена має діаграму спрямованості у вигляді «вісімки», що має два мінімуми. Звідси з'являється принципова невизначеність у визначенні азимута об'єкту пошуку. Ця невизначеність складає 180 градусів. Цей недолік не є принциповим, оскільки невизначеність пошуку можна усунути організаційними заходами: в більшості випадків відомо, де знаходиться обвал гірської породи, відповідно шукати необхідно у напрямі обвалу, а ніяк не в протилежному напрямі. По-друге, пошуковий пристрій дає лише азимут об'єкту пошуку. Для ефективного пошуку людей необхідно окрім азимута знати ще і відстань до об'єкту пошуку. Третій недолік має принципове значення і пов'язаний з робочими довжинами хвиль випромінювання пошукового пристрою і радіомаяка. Брати до уваги характеристики діаграми спрямованості магнітної антени, що працює на прийом, при визначенні азимута об'єкту пошуку має сенс лише у тому випадку, коли випромінювач радіохвиль знаходиться в дальній зоні пошукової антени. В цьому випадку джерело випромінювання можна розглядати як точкове і все описане вище справедливо. Дальня зона в теорії антен визначається коефіцієнтом підсилення самої антени і робочою довжиною хвилі. У будь-якому випадку дальня зона має бути набагато більше ніж довжина хвилі випромінювання. У нашому випадку за робочі частоти системи пошуку можна вважати частоти 100кГц і нижче. Радіосигнали з більшими частотами дуже швидко затухають в товщі гірських порід, і проводити пошук людей під завалами в цьому випадку 5 86558 6 не є можливим. Радіосигнали зі вказаними частоне поле з частотою f2 уловлюють п'ятою рухомою тами і нижче здатні проникати в товщу гірських котушкою з феромагнітним сердечником, яку розпорід на велику глибину. ташовують в другому пошуковому пристрої, приДля частоти 100кГц довжина хвилі випромінючому це ж змінне магнітне поле з частотою f2 уловання складає 3000м, відповідно дальня зона для влюють шостою рухомою котушкою з магнітних антен починається від 30км і більш. Для феромагнітним сердечником, яку розташовують в нижчих частот ці відстані ще більші. В той же час третьому пошуковому пристрої, причому самі пореальне значення відстаней пошуку складає 50 шукові пристрої розташовують один відносно од100м. Таким чином, вся процедура пошуку при ного на деякій відомій відстані, причому пошукові використанні вказаної робочої довжини хвилі здійпристрої розташовують не на одній лінії, при цьоснюється в ближній зоні приймальних та передаму в кожному з трьох пошукових пристроїв здійсвальних магнітних антен, і ні про які їхні діаграмні нюють вузькосмугове підсилення і випрямлення характеристики в цьому випадку говорити не донизькочастотних сигналів, що приймаються руховодиться. В цьому випадку можна лише говорити мими котушками, причому в кожному з трьох попро індуктивний зв'язок між котушками з феромагшукових пристроїв випрямлений сигнал постійного нітними сердечниками, які лише за певних умов струму подають на вимірювачі рівня сигналу, при можна називати магнітними антенами. Визначати цьому в кожному з трьох пошукових пристроїв азимут об'єкту пошуку шляхом обертання в гориобертають рухомі котушки з феромагнітними серзонтальній площині приймальної котушки з сердедечниками: у першому пошуковому пристрої - четчником в цьому випадку безглуздо, оскільки маквертую котушку, в другому - п'яту, в третьому симальний рівень сигналу на клемах однієї шосту, при цьому в кожному з трьох пошукових котушки і при збудженні іншої і за наявності між пристроїв здійснюють вимірювання рівня прийняними індуктивному зв'язку спостерігається як при того, підсиленого і випрямленого низькочастотного співвісному, так і при паралельному розташуванні сигналу, при цьому добиваються появи в кожному котушок одна відносно іншої. Передбачити ж, як з трьох пошукових пристроїв максимального рівня буде розташована магнітна антена (котушка з севиміряного сигналу, після чого в кожному їх трьох рдечником) радіомаяка, не є можливим. пошукових пристроїв ці виміряні рівні сигналів за У той же час вкрай необхідно на невеликих калібрувальними номограмами переводять у відвідстанях вирішити задачу визначення азимута стані до об'єкту пошуку, при цьому отримують три об'єкту пошуку і відстані до нього, тобто проводити відстані до об'єкту пошуку від кожного їх трьох пошук людей, що перебувають під завалами гірсьпошукових пристроїв, після чого вирішують звиких порід. Велика смертність серед персоналу вучайну тригонометричну задачу і від кожного з погільних шахт обумовлена саме тим, що при існуюшукових пристроїв отримують однозначно азимут чому становищі справ швидко відшукати об'єкту пошуку, при цьому використовують один з постраждалих людей не є можливим. Ефективна отриманих азимутів і відстань до об'єкту пошуку апаратура і методика пошуку людей під завалами для здійснення рятувальних заходів від того пошугірських порід на сьогодні відсутні. кового пристрою, від якого здійснювати рятувальні В основу винаходу поставлено завдання визаходи найефективніше. значення азимута і відстані до об'єкту пошуку, що Порівняння передбачуваного винаходу з вже перебуває в товщі порід. Воно вирішується завдявідомими способами і прототипом показує, що ки тому, що спочатку генерують безперервні низьспосіб, що заявляється, виявляє нові технічні влакочастотні коливання з частотою f1, причому ці стивості, що полягають в можливості однозначного коливання подають на клеми першої нерухомої визначення азимута і дальності до об'єкту пошуку, котушки з феромагнітним сердечником і випроміщо перебуває в завалі гірських порід в межах ронюють тим самим змінне магнітне поле з частотою бочих відстаней, які реально в шахтах складають f1, при цьому першу котушку з феромагнітним сер50 - 100м. дечником розташовують в безпосередній близькоЦі властивості передбачуваного винаходу є сті від передбачуваного об'єкту пошуку, при цьому новими, оскільки в способі-прототипі через власзмінне магнітне поле з частотою f1 уловлюють друтиві йому недоліки, що полягають в неоднозначногою нерухомою котушкою з феромагнітним сердесті визначення азимута об'єкту пошуку, відсутність чником, яку встановлюють у радіомаяку об'єкту даних про відстань до об'єкту пошуку і принципопошуку, після чого сигнал, що знімається з клем вої неможливості здійснювати пошук в межах родругої котушки з феромагнітним сердечником підбочих відстаней 50 - 100м, проводити рятувальні силюють у вузькій смузі частот, випрямляють і операції з пошуку людей під обвалами гірських оцінюють його рівень, причому при перевищенні порід в шахтах не є можливим. випрямленим сигналом постійного струму деякого У запропонованому способі пошуку людей під порогового рівня починають генерувати безперерзавалами гірських порід кожну людину з числа вні низькочастотні коливання з частотою f2, які персоналу шахти забезпечують радіомаяком. У подають на клеми третьої нерухомої котушки з разі аварії пошук постраждалих здійснює спеціаферомагнітним сердечником, яку також розташольна група рятувальників, яку забезпечують пошувують у радіомаяку об'єкту пошуку, і випромінюють ковим обладнанням, що складається з чотирьох тим самим змінне магнітне поле з частотою f2, при частин. Пошукове обладнання складається з прицьому змінне магнітне поле з частотою f2 уловлюстрою активації радіомаяків і трьох пошукових ють четвертою рухомою котушкою з феромагнітпристроїв. Пристрій активації призначений для ним сердечником, яку розташовують в першому випромінювання змінного магнітного поля з частопошуковому пристрої, причому це ж змінне магніттою f1. Пристрій активації складається з генерато 7 86558 8 ра безперервних низькочастотних коливань з часналів 9, 10, 11 і 12, випрямлячів 13, 14, 15 і 16, тотою f1 необхідної потужності і нерухомої котушки порогового пристрою 17, вимірювачів рівня 18, 19 і з феромагнітним сердечником. Розташовують 20. пристрій активації у безпосередній близькості від Вихід генератора низькочастотних коливань 1 місця проведення рятувальних заходів. Потужність з'єднаний з виводами нерухомої котушки з феровипромінювання змінного магнітного поля має бумагнітним сердечником 3, виводи нерухомої котути достатньою для того, щоб це змінне магнітне шки з феромагнітним сердечником 4 з'єднані з поле можна було б прийняти радіомаяками, що входом вузькосмугового підсилювача низькочастознаходяться в зоні проведення рятувальних захотних сигналів 9, вихід якого з'єднаний зі входом дів. У кожному з радіомаяків це змінне магнітне випрямляча 13, вихід якого з'єднаний зі входом поле приймають, підсилюють і оцінюють його ріпорогового пристрою 17, вихід якого з'єднаний зі вень. При перевищенні цим рівнем деякого поровходом управління низькочастотного генератора 2, гового значення в радіомаяку включають генеравихід якого з'єднаний з виводами нерухомої котутор безперервних низькочастотних коливань з шки з феромагнітним сердечником 5, при цьому частотою f2, тобто здійснюють активацію радіомавиводи рухомої котушки з феромагнітним сердечяка. Ці коливання подають на клеми нерухомої ником 6 з'єднані зі входом вузькосмугового підсикотушки з феромагнітним сердечником, яку розлювача низькочастотних сигналів 10, при цьому ташовують в радіомаяку, і випромінюють тим савиводи рухомої котушки з феромагнітним сердечмим змінне магнітне поле з частотою f2. Це змінне ником 7 з'єднані зі входом вузькосмугового підсимагнітне поле з частотою f2 уловлюють трьома лювача низькочастотних сигналів 11, при цьому рухомими котушками з феромагнітними сердечнививоди рухомої котушки з феромагнітним сердечками трьох пошукових пристроїв, в кожному своєю ником 8 з'єднані зі входом вузькосмугового підсикотушкою. Прийняті пошуковими пристроями сиглювача низькочастотних сигналів 12, при цьому нали підсилюють у вузькій смузі частот, випрямвихід вузькосмугового підсилювача низькочастотляють і подають на вимірники рівня кожного з поних сигналів 10 з'єднаний зі входом випрямляча шукових пристроїв. Далі здійснюють обертання 14, при цьому вихід вузькосмугового підсилювача рухомих котушок пошукових пристроїв і вимірюють низькочастотних сигналів 11 з'єднаний зі входом рівень сигналу, що приймається, при цьому обервипрямляча 15, при цьому вихід вузькосмугового танням котушок досягають появи максимального підсилювача низькочастотних сигналів 12 з'єднарівня вимірюваного сигналу для кожного з пошуконий зі входом випрямляча 16, при цьому вихід вивих пристроїв. При цьому азимут об'єкту пошуку не прямляча 14 з'єднаний зі входом вимірювача рівня вимірюють, оскільки в ближній зоні випромінюючої 18, при цьому вихід випрямляча 15 з'єднаний зі котушки з феромагнітним сердечником цього зровходом вимірювача рівня 19, при цьому вихід вибити неможливо, оскільки цілком неможливо пепрямляча 16 з'єднаний зі входом вимірювача рівня редбачити, в якому положенні опиниться випромі20. нююча котушка радіомаяка. При цьому саме Працює пристрій, що реалізує спосіб пошуку положення випромінюючої котушки з феромагнітпостраждалих під завалами таким чином. ним сердечником радіомаяка не має значення. Генератор низькочастотних коливань 1 форОскільки рівень прийнятого сигналу однозначно мує низькочастотні коливання з частотою f1 необпов'язаний з відстанню до джерела випромінюхідної потужності, які збуджують за допомогою вання відомою залежністю, яку заздалегідь зніманерухомої котушки з феромагнітним сердечником ють і запам'ятовують, то по виміряних рівнях сиг3 змінне низькочастотне магнітне поле з частотою налів в коленому з пошукових пристроїв f1. Це змінне низькочастотне магнітне поле уловвизначають три відстані до радіомаяка від кожного люють нерухомою котушкою з феромагнітним сез трьох пошукових пристроїв відповідно. Оскільки рдечником 4, яка входить до складу радіомаяка. взаємне розташування всіх трьох пошукових приСигнал з виводів цієї нерухомої котушки з феромастроїв відоме, відомі відстані між ними і їх азимути гнітним сердечником 4 подають на вхід вузькосмуодин відносно одного, то по отриманих трьох відгового підсилювача низькочастотних сигналів 9, станях від пошукових пристроїв до об'єкту пошуку який також входить до складу радіомаяка, де привирішують звичайну тригонометричну задачу і йнятий сигнал підсилюють у вузькій смузі частот, отримують три азимути об'єкту пошуку від кожного відокремлюючи його від індустріальних завад, і з трьох пошукових пристроїв відповідно. Для проподають на випрямляч 13, що входить до складу ведення рятувальних заходів вибирають той азирадіомаяка. Випрямлений сигнал подають на вхід мут і ту відстань до об'єкту пошуку від того пошупорогового пристрою 17, що входить до складу кового пристрою, від якого здійснювати ці радіомаяка. При перевищенні прийнятого, посилерятувальні заходи найефективніше. ного і випрямленого сигналу деякого порогового Вказаний спосіб пошуку постраждалих під зарівня пороговий пристрій спрацьовує і включає валами можна реалізувати за допомогою пригенератор безперервних низькочастотних колистрою, приведеного на Фіг. вань 2, що входить до складу радіомаяка. Цей Пристрій пошуку постраждалих під завалами генератор безперервних низькочастотних колискладається з пристрою активації, радіомаяка і вань збуджує за допомогою нерухомої котушки з пристроїв пошуку і складається з генераторів ниферомагнітним сердечником 5, що входить до зькочастотних коливань 1 і 2, нерухомі котушки з складу радіомаяка, змінне низькочастотне магнітферомагнітними сердечниками 3, 4 і 5 рухомих не поле з частотою f2 заданої інтенсивності. Це котушок з феромагнітними сердечниками 6, 7 і 8, змінне низькочастотне магнітне поле з частотою f2 уловлюють рухомими котушками з феромагнітнивузькосмугових підсилювачів низькочастотних сиг 9 86558 10 мірювачів рівня сигналів, що приймаються. Після ми сердечниками 6, 7 і 8, що входять до складу того, як отримані максимальні значення виміряних трьох пошукових пристроїв. Сигнал, наведений на рівнів прийнятих сигналів за відповідними номовиводах і-тої приймальної рухомої котушки з феграмами визначають відстані від кожної з рухомих ромагнітним сердечником однозначно пов'язаний з котушок або від кожного з пошукових пристроїв до відстанями між приймальною і пене давальною радіомаяка або об'єкту пошуку. котушками тятспю залежністю Маючи, таким чином, три певні відстані від коæK ö Ui ( t ) = ç 3 ÷ × sin(2pf2 t + j0 ), жного з трьох пошукових пристроїв до об'єкту поè L ø шуку відповідно, відстані між пошуковими приде L — відстань між котушками, м; строями, які відомі заздалегідь, азимути кожного з К — коефіцієнт пропорційності, що має розміпошукових пристроїв, один відносно одного, які рність В×м3, залежний від амплітуди напруги збутакож відомі заздалегідь, вирішують просту тригодження передавальної котушки, частоти збудженнометричну задачу і отримують, таким чином, три ня, числа витків обох котушок, їх діаметру, азимути об'єкту пошуку від кожного з трьох пошудовжини і проникності феромагнітних сердечників; кових пристроїв відповідно. j0- початкова фаза низькочастотних коливань. Для вжиття рятувальних заходів вибирають Приведена залежність справедлива за умови, той азимут об'єкту пошуку і, відповідно ту відстань коли котушки мають максимальний коефіцієнт до об'єкту пошуку, від того з пошукових пристроїв, взаємної індукції. З цієї причини треба здійснити від якого вживати рятувальні заходи найефективорієнтацію рухомої котушки пошукової станції так, ніше. щоб прийнятий сигнал мав максимальний рівень. Таким чином, отримують координати об'єкту Цей сигнал має малий рівень і присутній на тлі пошуку-людину, що перебуває під завалом. індустріальних завад, що мають як магнітну, так і Народногосподарський ефект від використанрадіочастотну природи. Ці завади в шахтах хоч і ня передбачуваного винаходу пов'язаний з появою мають знижений рівень, але присутні у будь-якому можливості швидко і точно визначити координати випадку. людини, що перебуває під завалом гірської пороЗ цієї причини в кожній з пошукових станцій ди. При цьому з'являється можливість оперативно здійснюють вузькосмуговое підсилення прийнятого вжити рятувальні заходи і забезпечити, тим сасигналу і відокремлення його від індустріальних мим, збереження життя людей у кращому разі, у завад за допомогою вузькосмугових низькочастотнайгіршому випадку є можливість відшукати тіла них підсилювачів 10, 11 і 12, що входять до складу людей, вже загиблих внаслідок аварії. трьох пошукових пристроїв. При вживанні рятувальних заходів у більшості Для вимірювання рівня прийнятого сигналу в випадків місце аварії відоме. У цих випадках можпошукових станціях здійснюють його випрямляння на обійтися лише двома пошуковими пристроями. за допомогою випрямлячів 14, 15 і 16, що входять При визначенні азимутів об'єкту пошуку від двох до складу трьох пошукових пристроїв. пошукових пристроїв описаним способом виникає Прийняті, підсилені і випрямлені сигнали попринципова невизначеність у визначенні азимута. дають на входи вимірювачів рівня 18, 19 і 20, що При цьому необхідно вибрати азимут від пошуковходять до складу трьох пошукових пристроїв. вого пристрою на об'єкт пошуку один з двох. Один Далі здійснюють обертання рухомих котушок з азимутів указуватиме на місце завалу, іншій укапошукових пристроїв і вимірювання рівнів сигналів, зувати в протилежному напрямку. Вибрати потрібщо приймаються. При цьому обертанням рухомих ний азимут в цьому випадку можна організаційно. котушок добиваються максимальних показань ви Комп’ютерна верстка М. Мацело Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюTechnique for searching miners under crump
Автори англійськоюShyrokov Ihor Borysovych, Yaufman Anatolii Ivanovych
Назва патенту російськоюСпособ поиска пострадавших под завалами
Автори російськоюШироков Игорь Борисович, Яуфман Анатолий Иванович
МПК / Мітки
МПК: H04B 5/00, E21F 11/00, A62B 99/00
Мітки: спосіб, постраждалих, пошуку, завалами
Код посилання
<a href="https://ua.patents.su/5-86558-sposib-poshuku-postrazhdalikh-pid-zavalami.html" target="_blank" rel="follow" title="База патентів України">Спосіб пошуку постраждалих під завалами</a>
Спосіб пошуку даних в пошукових системах
Номер патенту: 33915
Опубліковано: 25.07.2008
Автор: Савчук Олег Леонідович
МПК: G06F 17/30
Мітки: пошуку, системах, пошукових, даних, спосіб
Формула / Реферат:
1. Спосіб пошуку даних в пошукових системах, у якому за допомогою суфіксного, а також префіксного дерева, та дерева приставок і закінчень за допомогою електронних засобів виявляються та вилучаються змінні частини, який відрізняється тим, що за допомогою електронних засобів у незмінних частинах слів текстів документів різних мов, за якими проводиться пошук, та у ключових словах запитів також вилучаються частини, які змінюються у...
Спосіб пошуку покладів корисних копалин
Номер патенту: 35122
Опубліковано: 26.08.2008
Автори: Іващенко Павло Миколайович, Бакай Едуард Аполлінарійович, Ковальов Микола Ілліч
МПК: G01V 9/00
Мітки: корисних, спосіб, пошуку, копалин, покладів
Формула / Реферат:
1. Спосіб пошуку покладів корисних копалин, що включає обробку космічного фотознімка, який відрізняється тим, що як космічний знімок використовують чорно-білий негатив, одержаний в інфрачервоному діапазоні частот, і обробку космічного знімка здійснюють, попередньо сформувавши пакет, що містить негатив космічного знімка, тестову пластину та рентгенівську плівку, сформований пакет обробляють γ-променями, відокремлюють рентгенівську плівку,...
Спосіб пошуку локальних покладів фосфоритів в осадових породах
Номер патенту: 54016
Опубліковано: 17.02.2003
Автор: Зиков Ігор Олександрович
МПК: G01V 9/00
Мітки: локальних, пошуку, покладів, фосфоритів, породах, спосіб, осадових
Формула / Реферат:
Спосіб пошуку локальних покладів фосфоритів в осадових породах, який включає виділення перспективних площ та побудову карт, який відрізняється тим, що проводять геологічну зйомку на вибраній площі переходу щитів та крупних кристалічних масивів до западин, аналізують матеріали зйомок, будують карти ізогіпс, ізопахіт і ізогам та із врахуванням вмісту Р2О5 виділяють площі підвищених і аномальних значень гамма-активності і за співвідношенням...
Пристрій для збереження і пошуку рядкових величин та спосіб збереження і пошуку рядкових величин
Номер патенту: 78806
Опубліковано: 25.04.2007
Автор: Дорохіна Галина Володимирівна
МПК: G06F 7/76, G06F 17/30, G06F 12/00
Мітки: пошуку, збереження, величин, рядкових, спосіб, пристрій
Формула / Реферат:
1. Пристрій для збереження і пошуку рядкових величин, що містить блок збереження символів алфавіту, блок пам'яті для збереження даних у деревоподібній структурі, у якій кожна вершина містить символ алфавіту і посилання на дочірні вершини, при цьому посилання на дочірні вершини упорядковані за номером в алфавіті символу, що міститься в них, множина вершин рівня 1 відповідає множині символів алфавіту, з яких починаються рядкові величини, гілка...
Спосіб геолого-геохімічного пошуку нафти і газу
Номер патенту: 62594
Опубліковано: 15.12.2003
Автори: Кузьмик Леонтій Мойсейович, Щелінський Михайло Олексійович, Лилак Микола Миколайович, Окрепкий Ігор Романович, Піта Микола Васильович, Ланчинський Віктор Іванович
МПК: G01V 9/00
Мітки: спосіб, геолого-геохімічного, нафти, пошуку, газу
Формула / Реферат:
Спосіб геолого-геохімічного пошуку нафти і газу, який включає відбір проб порід із приповерхневих відкладів, їх термовакуумну дегазацію, визначення концентрації та ступеня епігенетичності вуглеводневих газів у газоповітряній суміші, вилученої із проб порід, який відрізняється тим, що додатково визначають концентрацію вуглекислого газу і органічного вуглецю у відібраних пробах порід, розраховують ступінь епігенетичності метану, кожного із його...
Попередній патент: Електромеханічний тренажер для спорту та фітнесу
Наступний патент: Пристрій для гартування молольних куль
Випадковий патент: Спосіб визначення діючих речовин гербіциду кросс - хлорсульфурону і хлорсульфоксиму