Спосіб гіроскопічної стабілізації лідара в площині горизонту
Номер патенту: 92443
Опубліковано: 11.08.2014
Автори: Дубинський Ігор Миколайович, Дубінскій Андрєй Ігорєвіч

Формула / Реферат
1. Спосіб гіроскопічної стабілізації лідара в площині горизонту, що включає встановлення лідара на верхню поверхню гіроплатформи, що стабілізується, пов'язаної з опорною конструкцією, розташованою на несучій поверхні рухомого об'єкта; віброізоляцію гіроплатформи шляхом забезпечення її пружного безкарданового зв'язку з опорною конструкцією; просторову стабілізацію гіроплатформи шляхом забезпечення її маятникового підвісу, за рахунок додаткового її навантаження нижньою поверхнею, та додаткової гіроскопічної стабілізації платформи з лідаром за допомогою інерційного гіростабілізатора, під'єднаного до нижньої поверхні, який відрізняється тим, що просторову стабілізацію лідара відносно лінії горизонту здійснюють шляхом переведення гіроплатформи у підвішений стан в атмосфері відносно несучої поверхні рухомого об'єкта, за рахунок створення зниженого тиску у вакуумній порожнині з еластичною бічною поверхнею, яку розташовують між верхньою і нижньою поверхнями гіроплатформи так, що нерухомий і рухливий торці бічної еластичної поверхні вакуумної порожнини жорстко з'єднують з опорною конструкцією пристрою і з гіроплатформою, відповідно, при цьому, умову переходу гіроплатформи з лідаром у підвішений стан визначають із співвідношення:
![]() ,
,
де: ![]() - атмосферний тиск, Па;
- атмосферний тиск, Па;
![]() - ефективна площа рухомої торцевої поверхні вакуумної порожнини, м2;
- ефективна площа рухомої торцевої поверхні вакуумної порожнини, м2;
![]() - загальна маса гіроплатформи з лідаром і нижньої поверхні з інерційним гіростабілізатором, кг;
- загальна маса гіроплатформи з лідаром і нижньої поверхні з інерційним гіростабілізатором, кг;
![]() - прискорення вільного падіння, м/с2.
- прискорення вільного падіння, м/с2.
2. Спосіб за п. 1, який відрізняється тим, що як інерційний гіростабілізатор використовують вакуумний насос з обертовими турбінами, яким здійснюють також відкачування робочого середовища з вакуумної порожнини.
Текст
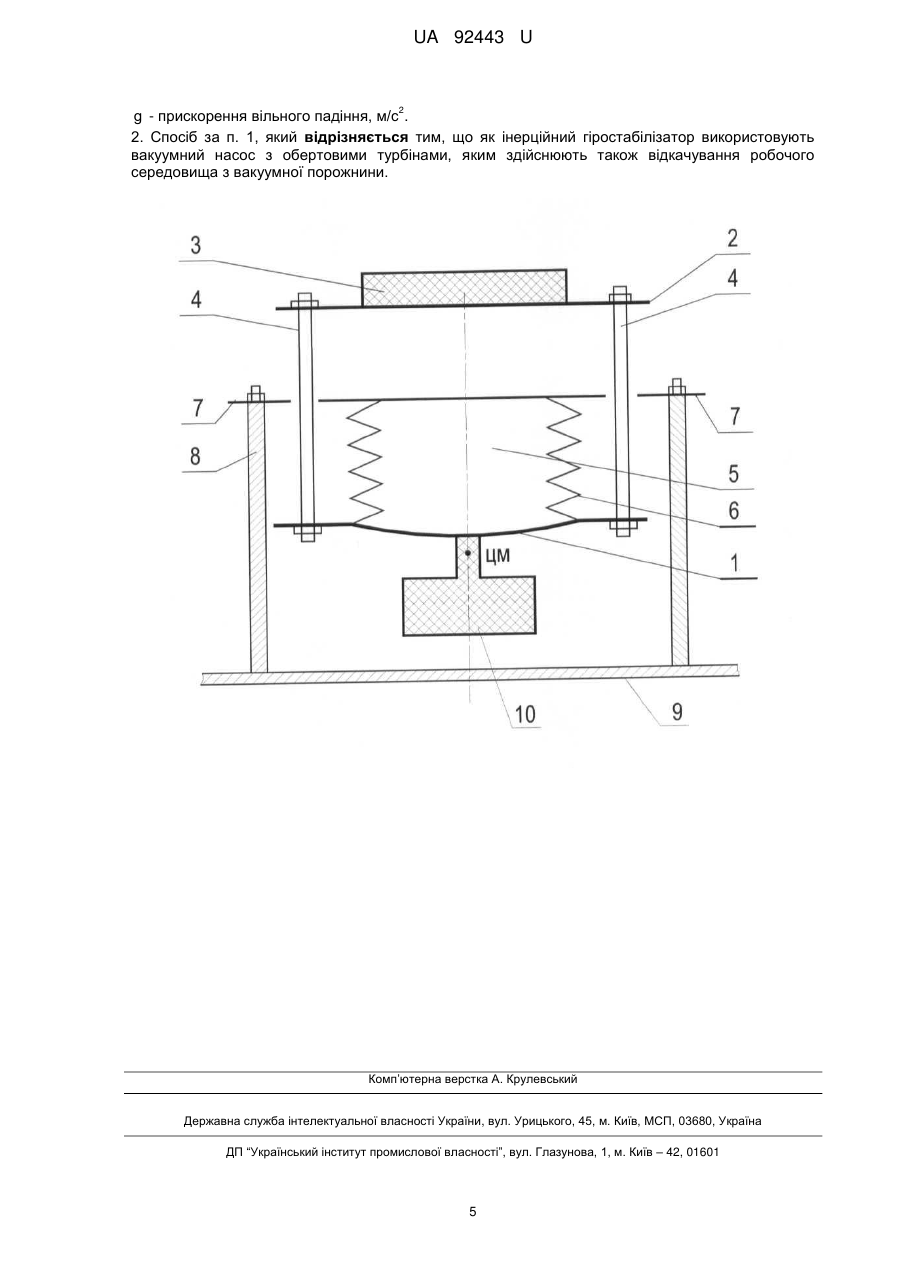
Реферат: Спосіб гіроскопічної стабілізації лідара в площині горизонту включає встановлення лідара на верхню поверхню гіроплатформи, що стабілізується, пов'язаної з опорною конструкцією, розташованою на несучій поверхні рухомого об'єкта; віброізоляцію гіроплатформи шляхом забезпечення її пружного безкарданового зв'язку з опорною конструкцією; просторову стабілізацію гіроплатформи шляхом забезпечення її маятникового підвісу, за рахунок додаткового її навантаження нижньою поверхнею, та додаткової гіроскопічної стабілізації платформи з лідаром за допомогою інерційного гіростабілізатора, під'єднаного до нижньої поверхні. Просторову стабілізацію лідара відносно лінії горизонту здійснюють шляхом переведення гіроплатформи у підвішений стан в атмосфері відносно несучої поверхні рухомого об'єкта, за рахунок створення зниженого тиску у вакуумній порожнині з еластичною бічною поверхнею, яку розташовують між верхньою і нижньою поверхнями гіроплатформи так, що нерухомий і рухливий торці бічної еластичної поверхні вакуумної порожнини жорстко з'єднують з опорною конструкцією пристрою і з гіроплатформою, відповідно. При цьому, умову переходу гіроплатформи з лідаром у підвішений стан визначають із визначеного співвідношення. UA 92443 U (12) UA 92443 U UA 92443 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі віброзахисної техніки і призначена для віброізоляції та гіроскопічної стабілізації відносно площини горизонту об'єктів щодо опори, яка стикається з твердою або рідкою підстиляючою поверхнею, і може під час руху зазнавати впливу ударів та коливань. Зокрема технічне вирішення, що заявляється, може бути використане для стабілізації в площині горизонту мобільних лідарів, розташованих на наземних транспортних засобах пересування або водних видах транспорту. Відомий спосіб пасивної силової гіростабілізації для гасіння коливань корабля відносно осі крену, заснований на безпосередньому використанні стабілізуючих властивостей (прецесійного руху) гіроскопа. Коли дія хвиль, що розгойдують корабель, перетворюється заспокоювачем в коливання рами з гіроскопом (История механики гироскопических систем. - М.: Наука, 1975. - С. 83). Основним елементом використовуваного при цьому заспокоювача, є двоступеневий гіроскоп, вектор кінетичного моменту якого спрямований уздовж вертикалі місця, з маятниковим гальмом для заспокоєння коливань рами підвісу, на якій встановлено вантаж для стабілізації всієї системи. Відомий також спосіб віброізоляції шляхом обмеження передачі виділеної ззовні енергії коливань і ударів механічно чутливим об'єктам (Виброизолирующая система для блока инерциальных датчиков; патент RU № 2219498). Використовуваний при цьому пристрій дозволяє забезпечити стабілізацію об'єкта в площині горизонту внаслідок установки пружних елементів безкарданового підвісу, що забезпечують можливість малого кутового переміщення рами по двох ортогональних осях. У цьому пристрої карданов підвіс замінений ортогонально розташованими чотирма пружними елементами і демпферами, на які встановлено лідар з корпусом. Ці пружні елементи з демпферами дають можливість малого кутового переміщення, аналогічно кутовим поворотам відносно осей рамок карданова підвісу. За своїм принципом вищеописані способи вібростабілізації об'єктів зумовлюють наявність пристроїв для їх реалізації у вигляді складних механічних конструкцій з контрольованими зворотними зв'язками, які зменшують амплітуду коливань, але не усувають їх повністю. Тому, що в них завжди існують жорсткі механічні зв'язки з несучою поверхнею рухомого об'єкта (транспортного засобу). Найбільш близьким до технічного вирішення, що заявляється, є спосіб гіроскопічної стабілізації лідара в площині горизонту шляхом гасіння зовнішніх вібраційних механічних впливів на положення лінії прицілу лідара при зондуванні об'єктів, за рахунок застосування пружно-в'язких зв'язків маятникової конструкції, на якій встановлено лідар, з опорною конструкцією, розташованою на несучій поверхні рухомого об'єкта, а також, за рахунок маятникового підвісу цієї платформи (Устройство гироскопической стабилизации лидара в плоскости горизонта; патент RU № 2329468). Використовуваний при цьому пристрій містить гірорамну конструкцію, що стабілізується, і яка має маятниковий ефект та складається із верхньої і нижньої кільцевих поверхонь, жорстко пов'язаних між собою укосинами. На верхній поверхні розташований лідар. Рамна конструкція, через пружні елементи (пружиниі демпфери), закріплена на опорних стійках (кронштейнах), встановлених на несучій поверхні рухомого об'єкта. При цьому до нижньої кільцевої поверхні приєднаний гіродвигун з вектором кінетичного моменту, спрямованим уздовж вертикалі місця. У такий спосіб можливо частково вирішити задачу усунення дії зовнішніх вібраційних механічних впливів на положення лінії прицілу лідара при зондуванні об'єктів. Завдяки тому, що в робочому режимі лідара зовнішні вібраційні механічні дії будуть гаситися, в тому числі, у пружних елементах, що працюють як фільтр частот, за рахунок істотної різниці власної низької частоти підвішеного механічного маятника, а також будуть гаситися в паралельно встановлених в'язких демпферах. Однак його недоліком є те, що маятникова система, що складається з лідара та елементів корпусу, має центр мас нижче площини встановлення пружних елементів і демпферів. У зв'язку з цим, виникає необхідність застосовувати досить потужні пружні елементи, які не зможуть повністю здійснювати гасіння коливань від зовнішніх механічних впливів і, відповідно, забезпечувати ефективну віброізоляцію лідара. В основу корисної моделі поставлено задачу підвищення надійності і точності напрямку лінії прицілу лідара у просторі при зондуванні об'єктів, за рахунок виключення складних механічних систем зворотних зв'язків і датчиків, і забезпечення повної віброізоляції та автономної стабілізації лідара відносно лінії горизонту, при одночасному значному спрощенні пристрою для його реалізації. Поставлена задача вирішується тим, що у способі гіроскопічної стабілізації лідара в площині горизонту, що включає встановлення лідара на верхню поверхню гіроплатформи, що 1 UA 92443 U 5 10 15 стабілізується, пов'язаної з опорною конструкцією, розташованою на несучій поверхні рухомого об'єкта; віброізоляцію гіроплатформи шляхом забезпечення її пружного безкарданового зв'язку з опорною конструкцією; просторову стабілізацію гіроплатформи шляхом забезпечення її маятникового підвісу, за рахунок додаткового її навантаження нижньою поверхнею, і додаткової гіроскопічної стабілізації платформи з лідаром за допомогою інерційного гіростабілізатора, під'єднаного до нижньої поверхні, новим є те, що просторову стабілізацію лідара відносно лінії горизонту здійснюють шляхом переведення гіроплатформи у підвішений стан в атмосфері відносно несучої поверхні рухомого об'єкта, за рахунок створення зниженого тиску у вакуумній порожнині з еластичною бічною поверхнею, яку розташовують між верхньою і нижньою поверхнями гіроплатформи. При цьому нерухомий і рухливий торці бічної еластичної поверхні вакуумної порожнини жорстко з'єднують з опорною конструкцією пристрою і з гіроплатформою, відповідно. Умову переходу гіроплатформи з лідаром у підвішений стан визначають із співвідношення: mg PaSeff 0 , де: Pa - тиск атмосфери, Па; 2 20 25 30 35 40 45 50 55 Seff - ефективна площа рухомої торцевої поверхні вакуумної порожнини, м ; m - загальна маса гіроплатформи з лідаром і нижньої поверхні з інерційним гіростабілізатором, кг; 2 g - прискорення вільного падіння, м/с . Як інерційний гіростабілізатор використовують вакуумний насос з обертовими турбінами, яким здійснюють також відкачування робочого середовища з вакуумної порожнини. Зазначена сукупність ознак заявленого технічного рішення сприяє вирішенню поставленої задачі наступним чином. У заявленому способі гіроскопічної стабілізації використовується принцип вакуумноатмосферного переходу у підвішений стан (левітацію) лідара відносно опорної конструкції. Тобто, об'єкт (лідар), що підлягає віброізоляції, практично "плаває" в атмосфері відносно опори, чим забезпечується незалежний безконтактний його підвіс відносно несучої поверхні транспортного засобу. Це дозволяє виключити складні механічні системи зворотних зв'язків і датчиків, і забезпечити практично повну віброізоляцію і автономну стабілізацію відносно лінії горизонту об'єкта (лідара) практично будь-якої заданої ваги при досить великих амплітудах коливань несучої поверхні рухомого транспортного засобу, на якому він розташований. Стабілізуючим елементом відносно горизонту є інерційний гіростабілізатор, який утримує верхню поверхню з лідаром, що перебуває у повітрі, у підвішеному стані в площині горизонту, коли при зміні кутової швидкості несучої поверхні рухомого транспортного засобу (корпусу корабля, автомобіля) виникає момент гіроскопічної реакції, спрямований протилежно моменту, викликаному зовнішніми коливаннями. Схема пристрою, який реалізує спосіб гіроскопічної стабілізації лідара в площині горизонту, що заявляється, представлена на кресленні. Пристрій містить гіроплатформу, що має маятниковий ефект, виконану у вигляді нижньої поверхні 1 і верхньої поверхні 2 із встановленим на ній лідаром 3, жорстко з'єднаних між собою штангами 4. Пристрій також містить вакуумну порожнину 5 з еластичною бічною поверхнею 6, верхній торець якої вакуумнощільно приєднаний до опорної поверхні 7, а нижній рухливий торець порожнини 5 жорстко приєднаний до нижньої поверхні 1 гіроплатформи. При цьому, опорна поверхня 7 жорстко закріплена на опорних стійках 8 опорної конструкції пристрою, встановлених на несучій поверхні 9 рухомого об'єкта. До нижньої поверхні 1 гіроплатформи приєднаний інерційний гіростабілізатор 10. При цьому, отвори і канали відкачування / напуску робочого середовища в вакуумну порожнину 5 (на схемі не показані) можуть бути розміщені на опорній поверхні 7 пристрою (коли вакуумний насос розташований поруч з рухомими вузлами конструкції) або на рухомій торцевій поверхні 4 вакуумної порожнини (коли вакуумний насос розташований на рухомій поверхні), що залежить від умов експлуатації пристрою. Опорна поверхня 7 може бути виконана будь-якої, конструктивно виправданої форми (прямокутної, кільцевої, хрестоподібної і т.і.), але забезпечувати при цьому вакуумнощільне прилягання до неї вакуумної порожнини. Для забезпечення фіксації лідара в похідному положенні, між верхньою поверхнею 2 і опорною поверхнею 7 розташовують фіксуючі пружні елементи, наприклад, гумові бобишки (на схемі не показані), на які опускається поверхня 2 з лідаром з робочого положення. 2 UA 92443 U 5 10 15 20 25 30 35 40 45 50 55 Заявлений спосіб реалізується в цьому пристрої таким чином. У вихідному (похідному) положенні вакуумна порожнина 5 наповнена атмосферою (газом), а її бічна еластична поверхня 6 розтягнута так, що верхня поверхня 2, із встановленим на ній лідаром 3, перебуває у нерухомому положенні на фіксуючих елементах. При переведенні об'єкта стабілізації (лідара) 3 в робоче положення, здійснюють відкачування атмосфери (робочого газу) з вакуумній порожнині 5 до критичного тиску, при якому бічна еластична поверхня 6 стискається під дією сили атмосферного тиску (CAT). При цьому, гіроплатформа з лідаром піднімається і переходить в левітуючий (підвішений) стан в атмосфері. Дію левітуючої сили САД можна розглядати як окремий випадок дії закону Архімеда в атмосфері. Підйомна левітуюча сила прикладена до рухомої поверхні 1 вакуумної порожнини 5, яка знаходиться на кордоні двох середовищ - атмосфери і вакууму, а нерухомий торець бічної поверхні 6 вакуумної порожнини 5 закріплений на опорній поверхні 7, встановленій на опорних стійках 8. Левітація об'єкта в атмосфері відносно опори відбувається, якщо виконується умова: mg PaSeff 0 (1) де: 2 Seff - ефективна площа рухомої торцевої поверхні вакуумної порожнини, м ; m - загальна маса гіроплатформи з лідаром і нижньої поверхні з інерційним гіростабілізатором, кг; 2 g - прискорення вільного падіння, м/с . При цьому тиск P0 у вакуумній порожнини повинен бути набагато менше атмосферного тиску Pa . При досягненні критичного тиску P0 усередині порожнини, рухлива поверхня 1 з інерційним гіростабілізатором 10 і верхня поверхня 2 з лідаром 3, що утворюють маятникову гіростабілізовану систему загальною масою m , піднімаються вгору під дією сили САД і переходять у робоче положення, перебуваючи в левітуючому (підвішеному) стані в атмосфері відносно опорної поверхні 7 і несучої поверхні 9 рухомого об'єкта. Цей стан, у даному випадку, відповідає стану стабільної рівноваги, і вакуумний насос відключається, якщо немає натікання газу у вакуумну порожнину. Подальше зниження тиску практично не впливає на умову левітації об'єкта. При цьому, якщо тиск P0 зменшуватиметься від 0,05 Pa і нижче, то сила САД практично не змінюється, що дозволяє системі ефективно працювати при низьких значеннях вакууму без значних витрат енергії на відкачування атмосфери. Лідар 3 піднімається відносно опори за рахунок зовнішньої сили САД, діючої на зовнішню сторону рухомої поверхні 1 з боку атмосфери, тобто практично "плаває" в атмосфері без впливу на нього будь-яких механічних зв'язків. Жорстко пов'язані між собою з'єднувальними штангами верхня і нижня рухливі поверхні гіроплатформи, з центром мас нижче рухомої поверхні, утворюють маятникове гальмо пасивної стабілізації, що дозволяє додатково стабілізувати об'єкт (лідар), що підлягає віброізоляції, від коротких бічних вібрацій. З формули (1) випливає, що загальна вага маятникової системи з лідаром, що піднімається, повинна бути пропорційною площі рухомої поверхні: m k Seff , де k Pa g 3 Прості оцінки для вакуумної порожнини об'ємом 1 м і площею рухомої торцевої поверхні 1 2 м показують, що сила САД з якою атмосфера діє на рухому торцеву поверхню дорівнюватиме 101300 Н. 3 Тому, пристрій, що має вакуумну порожнину обсягом 1 м з площею рухомої торцевої 2 поверхні 1 м , може підняти тіло вагою 10 000 кг на висоту до 1 м і утримувати його в підвішеному - робочому стані необхідний час, якщо тиск P0 у вакуумній порожнині буде значно менше Pa . При цьому, бокова поверхня вакуумної порожнини може бути досить тонкою, виконаною з будь-якого вакуумнощільного еластичного матеріалу і будь-якої форми, оскільки не бере участі у підтриманні лідара у підвішеному стані, а виконує розділову роль між повітряним і вакуумним середовищами. Одночасно з початком відкачування вакуумної порожнини, вмикається інерційний гіростабілізатор для гіроскопічної стабілізації лідара в площині горизонту. 3 UA 92443 U 5 10 15 20 25 30 35 Як інерційний гіростабілізатор може бути застосований турбомолекулярний або роторний насос, який вакуумнощільно перпендикулярно прикріплюється до площини рухомої поверхні 1. У цьому випадку він виконує дві функції - підтримує вакуум в порожнині і гіростабілізує лідар, за рахунок обертання вала зі швидкостями до 30 000 обертів/хвилину, одночасно будучи складовою частиною маятникової системи. Оптимальним, задля вирішення поставленої мети, є використання щонайменше трьох інерційних гіростабілізаторів з вектором кінетичного моменту, спрямованим по вертикалі місця під середнім кутом 45° до площини рухомої торцевої поверхні вакуумної порожнини. Що дозволить утримати лідар у просторі в трьох координатах X, Y, Z відносно лінії горизонту. Коли, при коливаннях/нахилах несучої поверхні транспортного засобу у будь-якій із трьох площин, лідар буде жорстко утримуватися векторами кінетичного моменту строго у площині горизонту. Для приведення пристрою в початковий похідний стан, відкачування з вакуумної порожнини припиняється і здійснюється природний напуск повітря у вакуумну порожнину до атмосферного тиску Pa . Сили, що діють на рухому поверхню 1, вирівнюються, при цьому верхня поверхня 2 з лідаром опускається, під дією сили тяжіння, на пружні елементи опорної поверхні 7 в похідний стан. Для усунення можливих впливів звукових коливань і поривів вітру, вакуумна порожнина може бути захищена звукоізольованим корпусом, який прикріплюється до корпусу транспортного засобу. Запропоновані спосіб гіростабілізації лідара в площині горизонту, дозволяє: - утримувати у підвішеному (левітуючому) стані в атмосфері об'єкт стабілізації (лідар) практично будь-якої розрахункової ваги без механічного підвісу будь-якого типу, зберігаючи лідар строго в заданому положенні відносно площини горизонту, при досить великих кутах коливань несучої поверхні рухомого об'єкта (корпусу транспортного засобу); - демпфірувати коливання об'єкта стабілізації (лідара) за допомогою його переведення у підвішений (левітуючий) стан в атмосфері щодо опори, при цьому, лідар утримується в площині горизонту, при виникненні коливань несучої поверхні транспортного засобу, за рахунок гіроскопічного моменту стабілізації та маятникового ефекту пасивної стабілізації; - усувати коливання лінії прицілу лідара в необхідному діапазоні частот, що виникають під час роботи будь-яких вібруючих бортових пристроїв транспортного засобу. При цьому пристрій для реалізації заявленого способу має підвищену надійність, простоту обслуговування і може ефективно застосовуватися як на наземних транспортних засобах, так і морських судах різноманітного призначення. Заявлена корисна модель може успішно використовуватися для віброзахисту і гіроскопічної стабілізації лідарів і пов'язаних з ними систем навігації, лазерних далекомірів та іншого подібного обладнання, яке потребує жорсткої контрольованої прив'язки до віддаленого об'єкта. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 50 55 1. Спосіб гіроскопічної стабілізації лідара в площині горизонту, що включає встановлення лідара на верхню поверхню гіроплатформи, що стабілізується, пов'язаної з опорною конструкцією, розташованою на несучій поверхні рухомого об'єкта; віброізоляцію гіроплатформи шляхом забезпечення її пружного безкарданового зв'язку з опорною конструкцією; просторову стабілізацію гіроплатформи шляхом забезпечення її маятникового підвісу, за рахунок додаткового її навантаження нижньоюповерхнею, та додаткової гіроскопічної стабілізації платформи з лідаром за допомогою інерційного гіростабілізатора, під'єднаного до нижньої поверхні, який відрізняється тим, що просторову стабілізацію лідара відносно лінії горизонту здійснюють шляхом переведення гіроплатформи у підвішений стан в атмосфері відносно несучої поверхні рухомого об'єкта, за рахунок створення зниженого тиску у вакуумній порожнині з еластичною бічною поверхнею, яку розташовують між верхньою і нижньою поверхнями гіроплатформи так, що нерухомий і рухливий торці бічної еластичної поверхні вакуумної порожнини жорстко з'єднують з опорною конструкцією пристрою і з гіроплатформою, відповідно, при цьому, умову переходу гіроплатформи з лідаром у підвішений стан визначають із співвідношення: mg PaSeff 0 , де: Pa - атмосферний тиск, Па; 2 Seff - ефективна площа рухомої торцевої поверхні вакуумної порожнини, м ; m - загальна маса гіроплатформи з лідаром і нижньої поверхні з інерційним гіростабілізатором, кг; 4 UA 92443 U 2 g - прискорення вільного падіння, м/с . 2. Спосіб за п. 1, який відрізняється тим, що як інерційний гіростабілізатор використовують вакуумний насос з обертовими турбінами, яким здійснюють також відкачування робочого середовища з вакуумної порожнини. Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюDubynskyi Ihor Mykolaiovych, Dubynskyi Andrii Ihorovych
Автори російськоюДубинский Игорь Николаевич, Дубинский Андрей Игоревич
МПК / Мітки
МПК: G01C 21/18
Мітки: спосіб, стабілізації, лідара, площині, горизонту, гіроскопічної
Код посилання
<a href="https://ua.patents.su/7-92443-sposib-giroskopichno-stabilizaci-lidara-v-ploshhini-gorizontu.html" target="_blank" rel="follow" title="База патентів України">Спосіб гіроскопічної стабілізації лідара в площині горизонту</a>
Спосіб пневмогідродинамічної обробки продуктивного горизонту свердловини
Номер патенту: 47577
Опубліковано: 10.02.2010
Автори: Софійський Костянтин Костянтинович, Єфремов Ігор Олександрович, Житльонок Дмитро Мойсейович, Чередніков Валерій Васильович, Булат Анатолій Федорович, Барадулін Євген Григорович, Філімонов Павло Євгенович
МПК: E21B 43/26
Мітки: горизонту, свердловини, продуктивного, пневмогідродинамічної, обробки, спосіб
Формула / Реферат:
Спосіб пневмогідродинамічної обробки продуктивного горизонту свердловини, який включає буріння свердловини, її обсадку трубами з перфорацією на продуктивному горизонті, герметизацію, спуск колони насосно-компресорних труб з пакером та кінцевиком, установку пакера на продуктивному горизонті, установку устьової арматури, заповнення свердловини робочою рідиною, пневмогідродинамічну обробку продуктивного горизонту свердловини шляхом створення...
Спосіб розкриття та підготовки обводненого горизонту в кар’єрі
Номер патенту: 24301
Опубліковано: 17.07.1998
Автори: Півень Володимир Олександрович, Лотоус Костянтин Вікторович, Гонцул Володимир Олексійович, Коваленко Ігор Анатольович, Лотоус Віктор Вікторович, Романенко Олександр Васильович, Риков Ігор Михайлович, Дриженко Анатолій Юрійович, Бадагов Володимир Федорович, Корявченков Валерій Михайлович
Мітки: підготовки, обводненого, кар'єрі, розкриття, горизонту, спосіб
Формула / Реферат:
1. Спосіб розкриття та підготовки обводненого горизонту в кар'єрі, який включає вибурювання вибухових свердловин та вибухові роботи, виїмку розпушеної гірничої маси на висоту горизонта шарами зверху донизу з відкачуванням підземних вод через водорозбірники та відробку уступу, який відрізняється тим, що попередньо проектують межу депресійної воронки з основою на рівні підошви траншеї, свердловини вибурюють на кожному шарі, висота і ширина яких...
Обладнання свердловини для пневмогідродинамічної обробки продуктивного горизонту
Номер патенту: 48845
Опубліковано: 12.04.2010
Автори: Булат Анатолій Федорович, Барадулін Євген Григорович, Житльонок Дмитро Мойсейович, Чередніков Валерій Васильович, Єфремов Ігор Олександрович, Софійський Костянтин Костянтинович, Філімонов Павло Євгенович
МПК: E21B 43/00
Мітки: горизонту, обробки, обладнання, пневмогідродинамічної, продуктивного, свердловини
Формула / Реферат:
Обладнання свердловини для пневмогідродинамічної обробки продуктивного горизонту, що включає перфоровану на продуктивному горизонті обсадну трубу, устєву арматуру, колону насосно-компресорних труб, пакер і кінцевик з радіальними отворами по його боковій поверхні, яке відрізняється тим, що радіальні отвори кінцевика виконані в шахматному порядку з їх розширенням на виході під кутом 8°, а пакер розташований посередині кінцевика, при цьому...
Пристрій для поглиблення орного горизонту
Номер патенту: 64997
Опубліковано: 25.11.2011
Автори: Бєлодєдов Віктор Олександрович, Філь Павло Володимирович, Носко Павло Леонідович
МПК: A01B 15/00
Мітки: поглиблення, орного, пристрій, горизонту
Формула / Реферат:
Пристрій для поглиблення орного горизонту, що містить відвал з нижнім і верхнім лемешами, встановленими з проміжком між ними, який відрізняється тим, що на правому крилі відвалу над верхнім лемешем встановлено двосторонній криволінійний ніж на осі, перпендикулярній площині, дотичній до поверхні відвалу в точці перетинання осі з поверхнею, з можливістю повороту ножа відносно цієї осі, причому криволінійна форма леза описується рівнянням:
Ультразвуковий датчик горизонту
Номер патенту: 101016
Опубліковано: 25.02.2013
Автори: Нисторяк Іван Олександрович, Зацерковний Віталій Іванович, Беленок Вадим Юрійович, Бурачек Всеволод Германович, Параніч Віктор Петрович
МПК: G01B 17/06, G01C 3/06, G01C 5/04, G01S 5/18
Мітки: датчик, ультразвуковий, горизонту
Формула / Реферат:
Ультразвуковий датчик горизонту, що містить заповнені рідиною герметичні сполучені посудини, обчислювальний блок і блок керування та обробки інформації, який відрізняється тим, що використані три посудини з гідрофобними звуковбирними стінками, які встановлені по дві на двох основах, розташованих перпендикулярно, і сполучені у верхній та нижній частинах таким чином, що одна посудина для двох основ є загальною, на дні кожної посудини...
Попередній патент: Пристрій для проведення імунохроматографічного аналізу на основі lateral flow технології
Наступний патент: Спосіб виготовлення титанового імплантату з двошаровим покриттям
Випадковий патент: Спосіб добору кнурів - плідників за статевими функціями