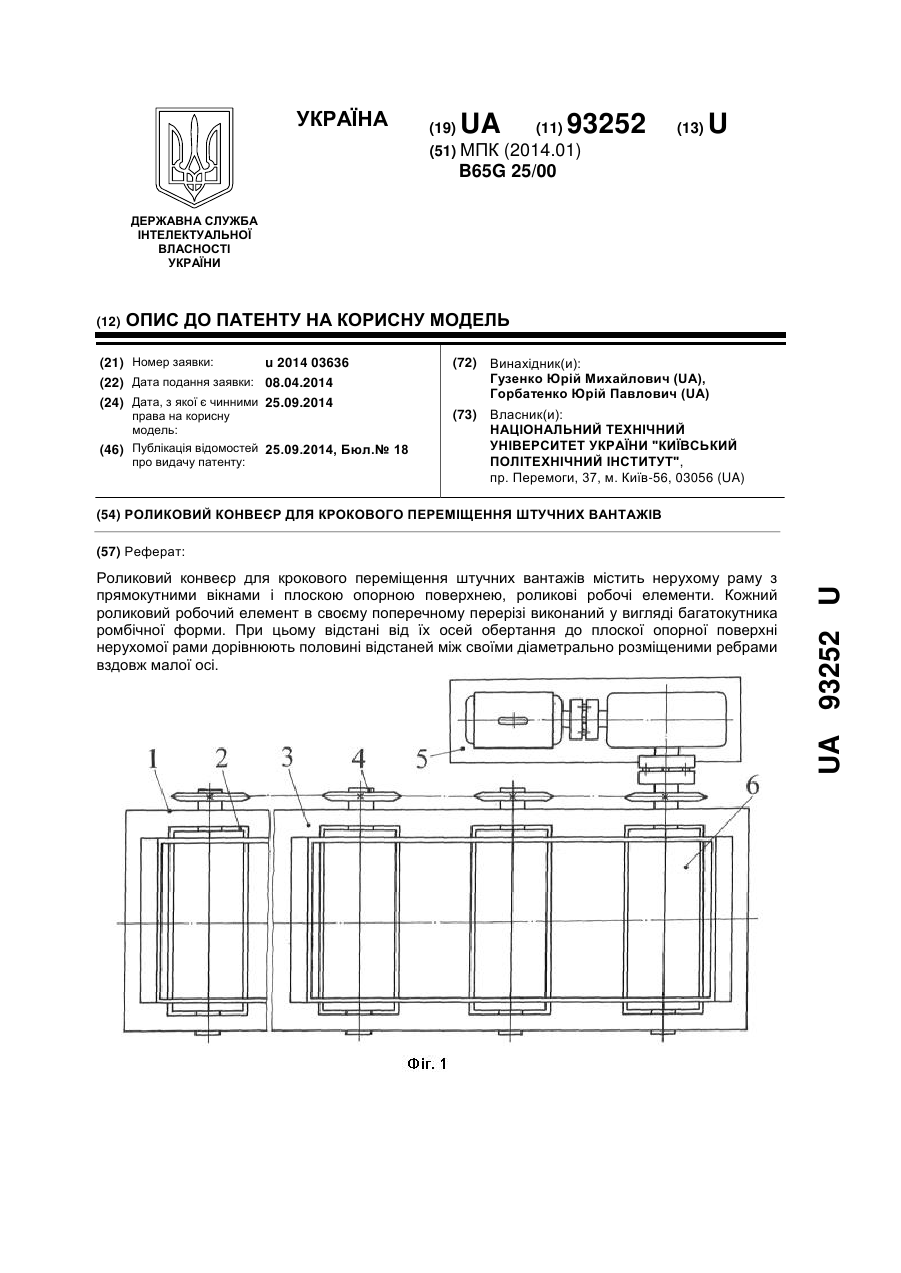
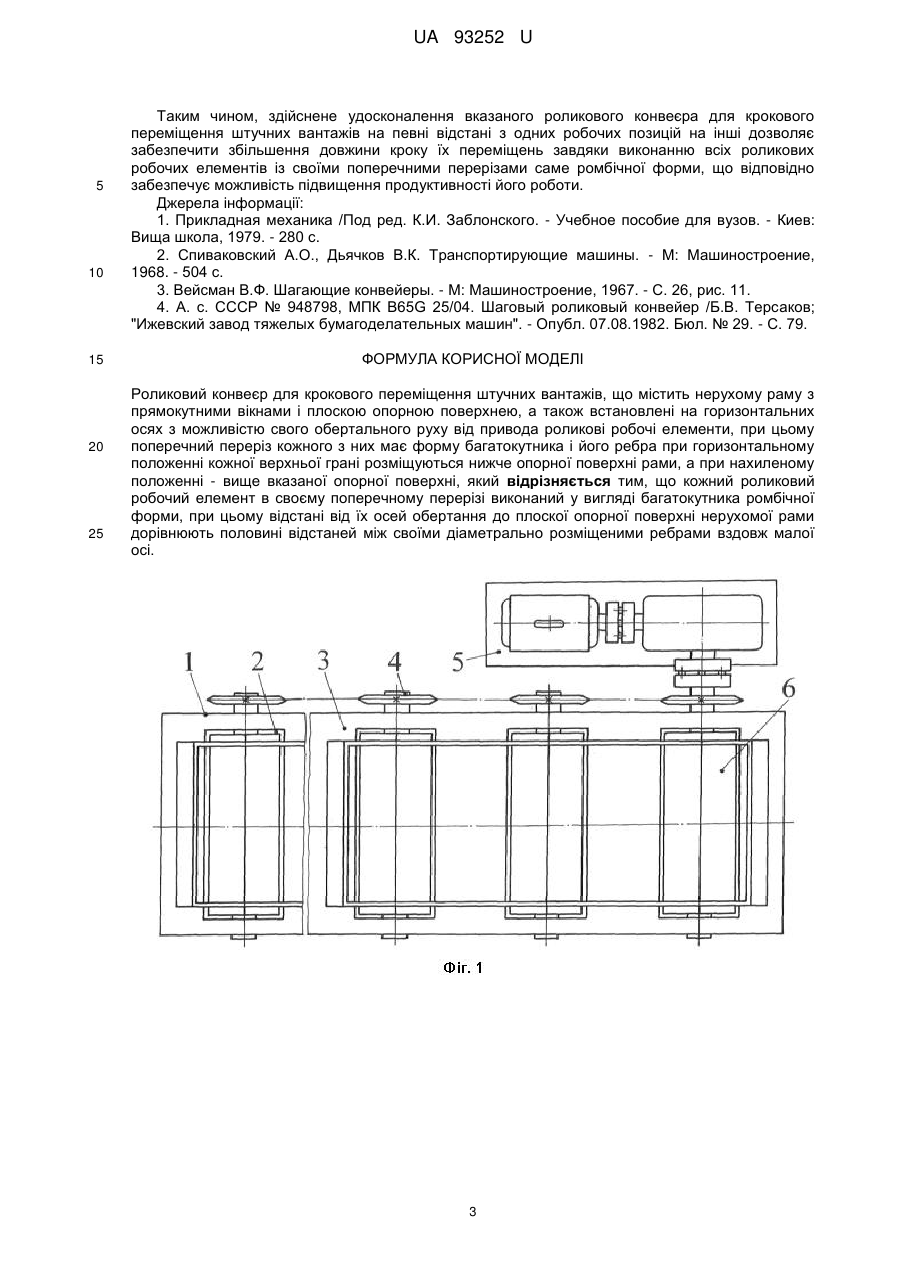
Роликовий конвеєр для крокового переміщення штучних вантажів
Номер патенту: 93252
Опубліковано: 25.09.2014


Формула / Реферат
Роликовий конвеєр для крокового переміщення штучних вантажів, що містить нерухому раму з прямокутними вікнами і плоскою опорною поверхнею, а також встановлені на горизонтальних осях з можливістю свого обертального руху від привода роликові робочі елементи, при цьому поперечний переріз кожного з них має форму багатокутника і його ребра при горизонтальному положенні кожної верхньої грані розміщуються нижче опорної поверхні рами, а при нахиленому положенні - вище вказаної опорної поверхні, який відрізняється тим, що кожний роликовий робочий елемент в своєму поперечному перерізі виконаний у вигляді багатокутника ромбічної форми, при цьому відстані від їх осей обертання до плоскої опорної поверхні нерухомої рами дорівнюють половині відстаней між своїми діаметрально розміщеними ребрами вздовж малої осі.
Текст
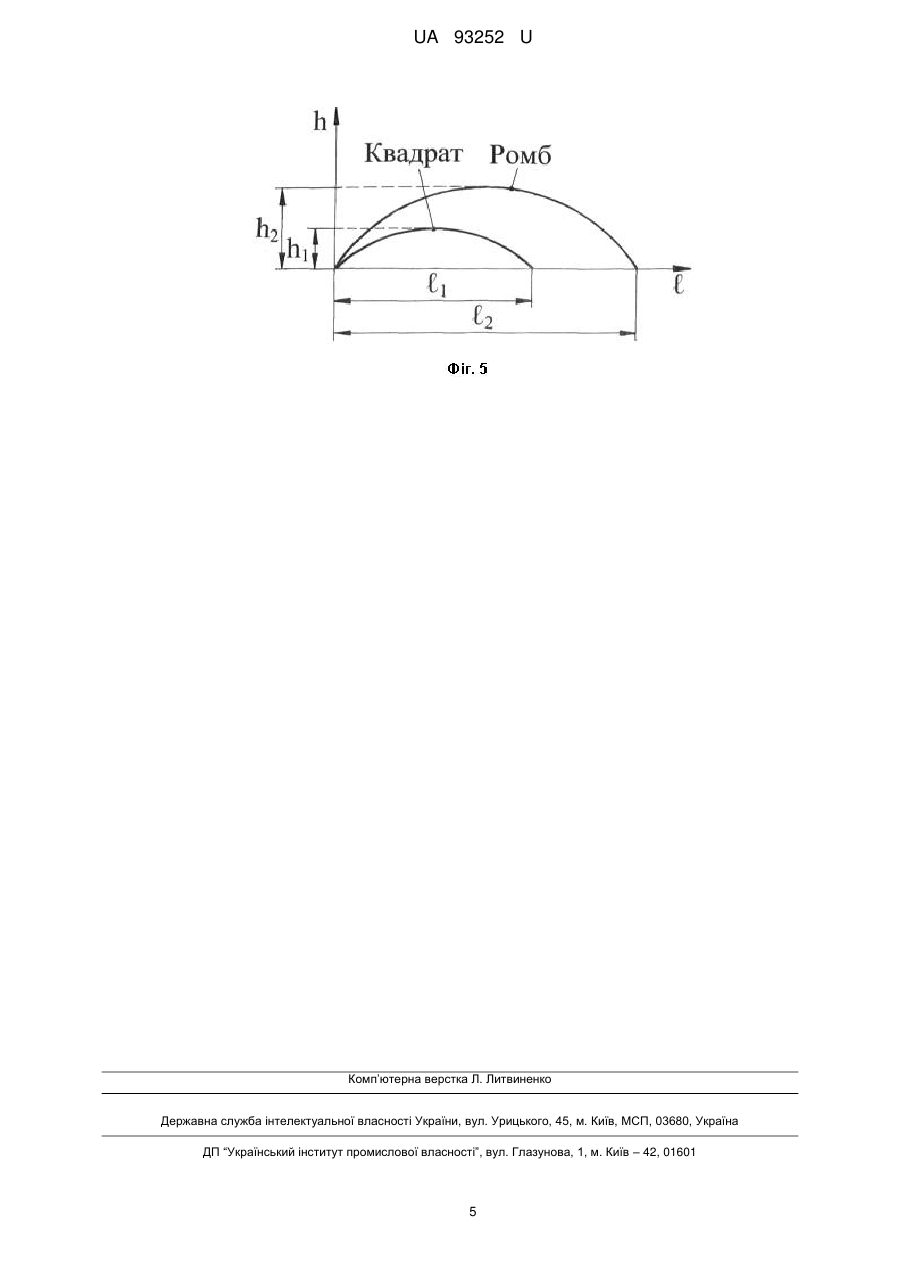
Реферат: UA 93252 U UA 93252 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до машинобудування і стосується саме різних роликових конвеєрів для крокового переміщення штучних вантажів на певні відстані з одних робочих позицій на інші [1, 2]. Відомий роликовий конвеєр для крокового переміщення штучних вантажів, який містить одну нерухому і другу рухому рами, а також приводи для горизонтального зворотнопоступального і вертикального переміщення рухомої рами, при цьому привод її вертикального переміщення виконаний у вигляді домкратів з роликами [3]. Недоліком такого роликового конвеєра є те, що він має складну свою конструкцію із-за наявності в ньому двох окремих приводів для здійснення горизонтального зворотнопоступального та вертикального переміщень його рухомої рами, а також виконання привода для її вертикального переміщення у вигляді домкратів з роликами. Найбільш близьким аналогом до корисної моделі за технічною суттю і ефектом, що досягається, є роликовий конвеєр для крокового переміщення штучних вантажів, який містить нерухому раму з прямокутними вікнами і плоскою опорною поверхнею, а також встановлені на горизонтальних осях з можливістю свого обертального руху від привода роликові робочі елементи, при цьому поперечний переріз кожного з них має форму багатокутника і його ребра при горизонтальному положенні кожної верхньої грані розміщуються нижче опорної поверхні рами, а при нахиленому положенні - вище вказаної опорної поверхні [4]. Такий роликовий конвеєр забезпечує достатньо значне спрощення своєї конструкції завдяки відсутності в ньому двох окремих між собою приводів для здійснення горизонтального зворотнопоступального та вертикального переміщень його рухомої рами, а також виконання одного із приводів для її вертикального переміщення у вигляді домкратів з роликами, замінивши їх тільки одним приводом обертального руху роликових робочих елементів у вигляді багатокутників, але не забезпечує достатньої продуктивності своєї роботи при кроковому переміщенні штучних вантажів на певні відстані з одних робочих позицій на інші, оскільки всі роликові робочі елементи в своїх поперечних перерізах виконані у вигляді багатокутників квадратної форми з однаковими довжинами діагоналей між діаметрально розміщеними ребрами, що є основним його недоліком. В основу корисної моделі поставлена задача підвищення продуктивності роботи роликового конвеєра при кроковому переміщенні штучних вантажів на певні відстані з одних робочих позицій на інші шляхом виключення виконання всіх роликових робочих елементів в своїх поперечних перерізах у вигляді багатокутників саме квадратної форми з однаковими довжинами їх діагоналей між своїми діаметрально розміщеними ребрами. Поставлена задача вирішується тим, що в роликовому конвеєрі для крокового переміщення штучних вантажів, який містить нерухому раму з прямокутними вікнами і плоскою опорною поверхнею, а також встановлені на горизонтальних осях з можливістю свого обертального руху від привода роликові робочі елементи, при цьому поперечний переріз кожного з них має форму багатокутника і його ребра при горизонтальному положенні кожної верхньої грані розміщуються нижче опорної поверхні рами, а при нахиленому положенні - вище вказаної опорної поверхні, згідно з корисною моделлю, кожний роликовий робочий елемент в своєму поперечному перерізі виконаний у вигляді багатокутника ромбічної форми, при цьому відстані від їх осей обертання до плоскої опорної поверхні нерухомої рами дорівнюють половині відстаней між своїми діаметрально розміщеними ребрами вздовж малої осі. Вказані відмітні ознаки дозволяють виключити в роликовому конвеєрі виконання всіх роликових робочих елементів в своїх поперечних перерізах у вигляді багатокутників саме квадратної форми з однаковими довжинами їх діагоналей між своїми діаметрально розміщеними ребрами та забезпечити збільшення довжини кроку переміщення штучних вантажів на певні відстані з одних робочих позицій на інші за рахунок виконання кожного вказаного робочого елемента в своєму поперечному перерізі у вигляді багатокутника ромбічної форми, при цьому відстані від осей обертання яких до плоскої опорної поверхні нерухомої рами дорівнюють саме половині відстаней між своїми діаметрально розміщеними ребрами вздовж малої осі, що відповідно забезпечує можливість підвищення продуктивності роботи цього роликового конвеєра при кроковому переміщенні штучних вантажів. На фіг. 1 схематично показаний удосконалений роликовий конвеєр для крокового переміщення штучних вантажів, вид зверху; на фіг. 2 - вигляд роликових робочих елементів конвеєра на фіг. 1 в подовжньому перерізі його рами; на фіг. 3 - вигляд роликового робочого елемента конвеєра на фіг. 1 і 2 в різних його положеннях; 1 UA 93252 U 5 10 15 20 25 30 35 40 45 50 55 на фіг. 4 - різні положення роликового робочого елемента конвеєра на фіг. 3 з поперечним перерізом у вигляді багатокутника ромбічної форми разом з його попередньою квадратною формою; фіг. 5 - форми зміни кроку переміщення та висоти підйому штучних вантажів на фіг. 4: де 1 нерухома рама; 2 - прямокутні вікна; 3 - плоска опорна поверхня; 4 - горизонтальні осі; 5 привод; 6 - роликові робочі елементи; 7, 8, 9, 10 - ребра робочих елементів; 11, 12, 13, 14 - грані робочих елементів; 15 - мала вісь; 16 - велика вісь; 17 - штучні вантажі. Роликовий конвеєр для крокового переміщення штучних вантажів містить нерухому раму 1 (фіг. 1, 2, 3 і 4) з прямокутними вікнами 2 і плоскою опорною поверхнею 3, а також встановлені на горизонтальних осях 4 з можливістю свого обертального руху від привода 5 роликові робочі елементи 6, при цьому поперечний переріз кожного з них має форму багатокутника і його ребра 7, 8, 9, 10 при горизонтальному положенні кожної верхньої грані 11, 12, 13 або 14 розміщуються нижче опорної поверхні 3 рами 1, а при нахиленому положенні - вище вказаної опорної поверхні 3. Крім цього, кожний роликовий робочий елемент 6 в своєму поперечному перерізі виконаний у вигляді багатокутника ромбічної форми, при цьому відстані а від їх осей обертання О до плоскої опорної поверхні 3 нерухомої рами 1 дорівнюють половині відстаней b між своїми діаметрально розміщеними ребрами 7, 9 вздовж малої осі 15. В результаті такого виконання конвеєра відстані а від осей обертання О роликових робочих елементів 6 до плоскої опорної поверхні 3 нерухомої рами 1 менше половини відстаней с між своїми ж діаметрально розміщеними ребрами 8, 10 вздовж їх великої осі 16, при цьому всі його роликові робочі елементи 6 встановлюються по відношенню до плоскої опорної поверхні 3 рами 1 так, щоб коли одна із граней 11, 12, 13 або 14 займає горизонтальне положення, то між нею та опорною поверхнею 3 рами 1 утворювався зазор δ, а штучні вантажі 17 нерухомо розміщувалися на рамі 1. При взаємодії з цими ж штучними вантажами 17 ребер 8, 10 роликових робочих елементів 6 вони піднімаються над плоскою опорною поверхнею 3 рами 1 на певну висоту h, a потім опускаються і знову нерухомо розміщуються на ній. Обертальний рух роликових робочих елементів 6 здійснюється від свого привода 5, який переважно складається з електродвигуна та необхідних для з'єднання його з вказаними роликовими робочими елементами 6 редукторів та відкритих механічних передач з використанням з'єднувальних муфт. Для забезпечення кінематичного зв'язку вибраного редуктора привода 5 конвеєра з роликовими робочими елементами 6 використовується звичайна ланцюгова передача з встановленими на їх осях зірочками та обхоплюючим їх втулково-роликовим ланцюгом, при цьому вказаний редуктор привода 5 може бути вибраним конічним або черв'ячним, які крім зменшення частоти обертання їх веденого вала та збільшення на ньому крутного моменту забезпечують також зміну напрямку його обертання під кутом 90°. При роботі такого роликового конвеєра його робочі елементи 6 по черзі можуть займати свої положення з розміщенням всіх їх ребер 7, 8, 9, 10 та граней 11, 12, 13, 14 нижче плоскої робочої поверхні 3 рами 1, а також вище над нею тільки ребер 8, 10 та всіх граней 11, 12, 13 або 14. В першому випадку всі штучні вантажі 17 будуть знаходитися нерухомо на плоскій робочій поверхні 3 рами 1, а в другому випадку будуть переміщатися вздовж її осі на певні відстані з необхідним кроком, тобто при синхронному русі всіх роликових робочих елементів 6 вони вступають в контактну взаємодію із штучними вантажами 17, знімають їх з плоскої опорної поверхні 3 нерухомої рами 1 і переносять їх на вибраний крок. Приклад 1 Для здійснення крокового переміщення штучних вантажів на певні відстані використовують роликовий конвеєр з робочими елементами, які мають однакову форму своїх поперечних перерізів у вигляді квадратів з шириною плоских граней, наприклад, по 50 мм та довжиною діагоналей між своїми ребрами по 70,5 мм. При такому виконанні всіх зазначених робочих елементів крок ℓ1 переміщення штучних вантажів з одних робочих позицій на інші буде дорівнювати величині 50 мм, а висота h1 їх підйому над плоскою опорною поверхнею рами величині 10 мм (фіг. 4 і 5). Приклад 2 Для здійснення крокового переміщення штучних вантажів на певні відстані використовують роликовий конвеєр з робочими елементами, які мають однакову форму своїх поперечних перерізів у вигляді ромбів з довжинами малої та великої осей між своїми ребрами по 50 мм і 90 мм. В такому випадку при висоті підйому h2=20 мм крок ℓ2 переміщення штучних вантажів з одних робочих позицій на інші буде дорівнювати величині 75 мм, що є в 1,5 рази більше від їх кроку ℓ1 при збільшенні висоти підйому h2 штучних вантажів в 2 рази. 2 UA 93252 U 5 10 15 20 25 Таким чином, здійснене удосконалення вказаного роликового конвеєра для крокового переміщення штучних вантажів на певні відстані з одних робочих позицій на інші дозволяє забезпечити збільшення довжини кроку їх переміщень завдяки виконанню всіх роликових робочих елементів із своїми поперечними перерізами саме ромбічної форми, що відповідно забезпечує можливість підвищення продуктивності його роботи. Джерела інформації: 1. Прикладная механика /Под ред. К.И. Заблонского. - Учебное пособие для вузов. - Киев: Вища школа, 1979. - 280 с. 2. Спиваковский А.О., Дьячков В.К. Транспортирующие машины. - М: Машиностроение, 1968. - 504 с. 3. Вейсман В.Ф. Шагающие конвейеры. - М: Машиностроение, 1967. - С. 26, рис. 11. 4. А. с. СССР № 948798, МПК В65G 25/04. Шаговый роликовый конвейер /Б.В. Терсаков; "Ижевский завод тяжелых бумагоделательных машин". - Опубл. 07.08.1982. Бюл. № 29. - С. 79. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Роликовий конвеєр для крокового переміщення штучних вантажів, що містить нерухому раму з прямокутними вікнами і плоскою опорною поверхнею, а також встановлені на горизонтальних осях з можливістю свого обертального руху від привода роликові робочі елементи, при цьому поперечний переріз кожного з них має форму багатокутника і його ребра при горизонтальному положенні кожної верхньої грані розміщуються нижче опорної поверхні рами, а при нахиленому положенні - вище вказаної опорної поверхні, який відрізняється тим, що кожний роликовий робочий елемент в своєму поперечному перерізі виконаний у вигляді багатокутника ромбічної форми, при цьому відстані від їх осей обертання до плоскої опорної поверхні нерухомої рами дорівнюють половині відстаней між своїми діаметрально розміщеними ребрами вздовж малої осі. 3 UA 93252 U 4 UA 93252 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюHuzenko Yurii Mykhailovych, Horbatenko Yurii Pavlovych
Автори російськоюГузенко Юрий Михайлович, Горбатенко Юрий Павлович
МПК / Мітки
МПК: B65G 25/00
Мітки: крокового, штучних, переміщення, роликовий, вантажів, конвеєр
Код посилання
<a href="https://ua.patents.su/7-93252-rolikovijj-konveehr-dlya-krokovogo-peremishhennya-shtuchnikh-vantazhiv.html" target="_blank" rel="follow" title="База патентів України">Роликовий конвеєр для крокового переміщення штучних вантажів</a>
Скребковий конвеєр для переміщення сипких вантажів
Номер патенту: 84459
Опубліковано: 25.10.2013
Автори: Рибалко Вячеслав Миколайович, Івасенко Денис Михайлович, Ловейкін Вячеслав Сергійович
МПК: B65G 19/00
Мітки: сипких, вантажів, конвеєр, переміщення, скребковий
Формула / Реферат:
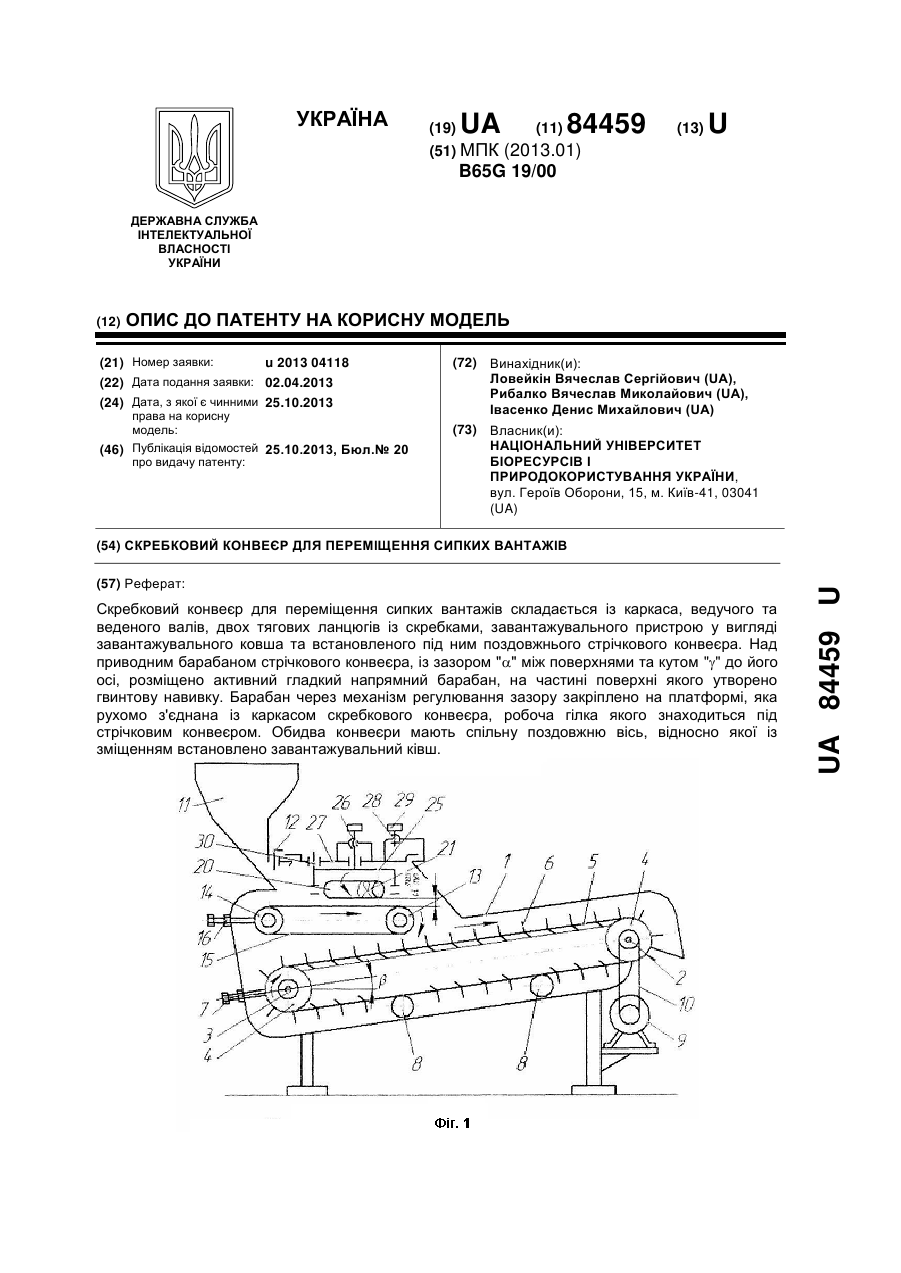
Скребковий конвеєр для переміщення сипких вантажів, який складається із каркаса, ведучого та веденого валів, двох тягових ланцюгів із скребками, завантажувального пристрою у вигляді завантажувального ковша та встановленого під ним поздовжнього стрічкового конвеєра, який відрізняється тим, що над приводним барабаном стрічкового конвеєра, із зазором "a" між поверхнями та кутом "g" до його осі, розміщено активний гладкий...
Роликовий гвинтовий конвеєр
Номер патенту: 66163
Опубліковано: 15.04.2004
Автор: Гевко Іван Богданович
МПК: B65G 33/16
Мітки: гвинтовий, конвеєр, роликовий
Формула / Реферат:
Роликовий гвинтовий конвеєр, який виконано у вигляді вертикальної рами, до якої жорстко закріплено гвинтові зовнішні і внутрішні Г-подібні несучі елементи з вертикально розміщеною центральною колоною, в які жорстко, з можливістю кругового обертання, встановлено пруткове полотно по гвинтовій поверхні у вигляді окремих роликів, а нижній кінець конвеєра виконано у вигляді прямолінійного роликового конвеєра з кутом нахилу до горизонту, причому...
Роликовий гвинтовий конвеєр
Номер патенту: 6296
Опубліковано: 16.05.2005
Автор: Гевко Іван Богданович
МПК: B65G 33/16
Мітки: гвинтовий, роликовий, конвеєр
Формула / Реферат:
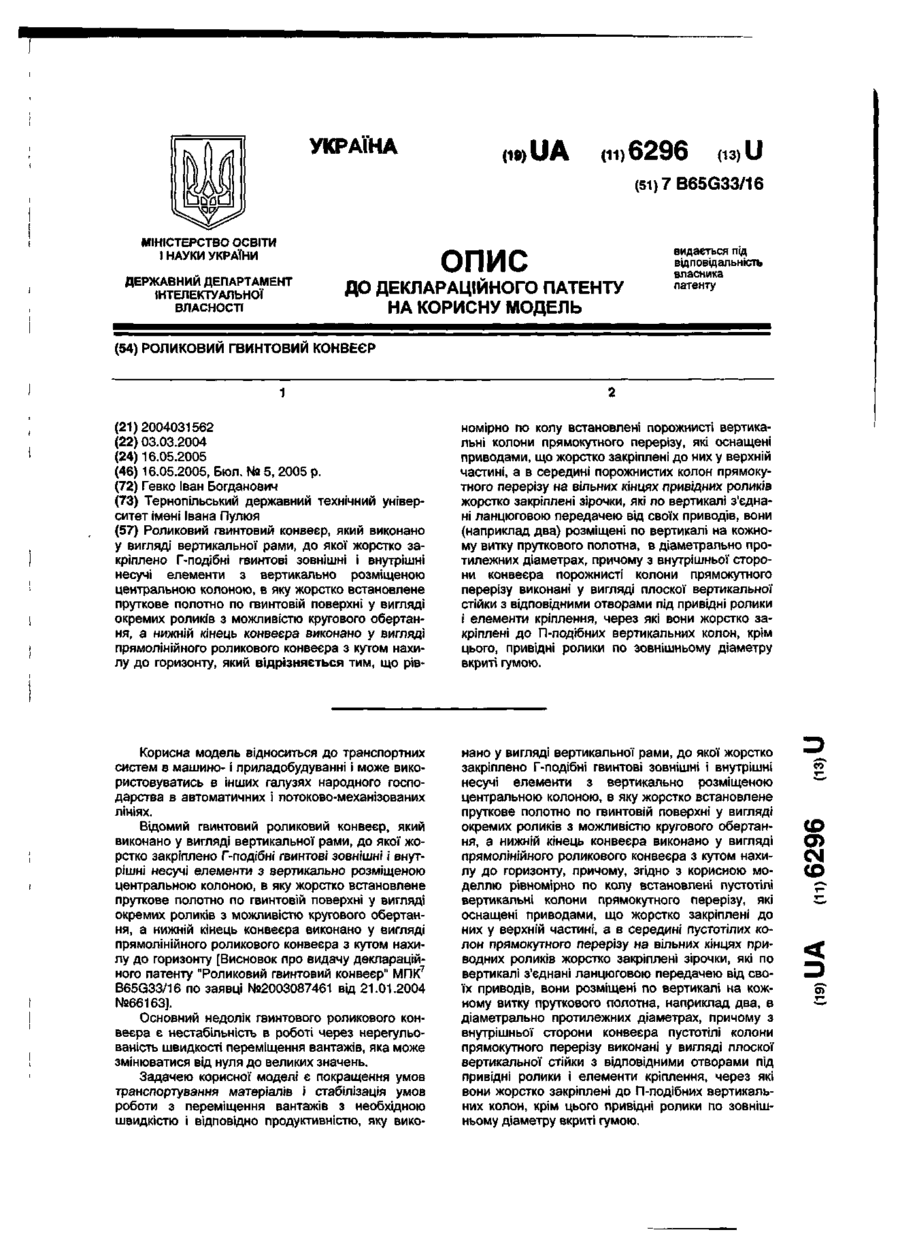
Роликовий гвинтовий конвеєр, який виконано у вигляді вертикальної рами, до якої жорстко закріплено Г-подібні гвинтові зовнішні і внутрішні несучі елементи з вертикально розміщеною центральною колоною, в яку жорстко встановлене пруткове полотно по гвинтовій поверхні у вигляді окремих роликів з можливістю кругового обертання, а нижній кінець конвеєра виконано у вигляді прямолінійного роликового конвеєра з кутом нахилу до горизонту, який...
Вертикальний гвинтовий транспортер штучних вантажів
Номер патенту: 66432
Опубліковано: 10.01.2012
Автор: Гевко Іван Богданович
МПК: B65G 33/16
Мітки: вантажів, вертикальний, транспортер, гвинтовий, штучних
Формула / Реферат:
Вертикальний гвинтовий транспортер штучних вантажів, який виконано у вигляді корпусу, гвинтового механізму подачі та механізмів завантаження, розвантаження і приводу, який відрізняється тим, що гвинтовий механізм подачі виконано у вигляді двох гвинтових спіралей, встановлених одна в одній співвісно та виконаних з протилежно направленими витками з шириною, меншою за меншу сторону чи діаметр штучного вантажу, а у внутрішній спіралі встановлено...
Привідний роликовий конвеєр
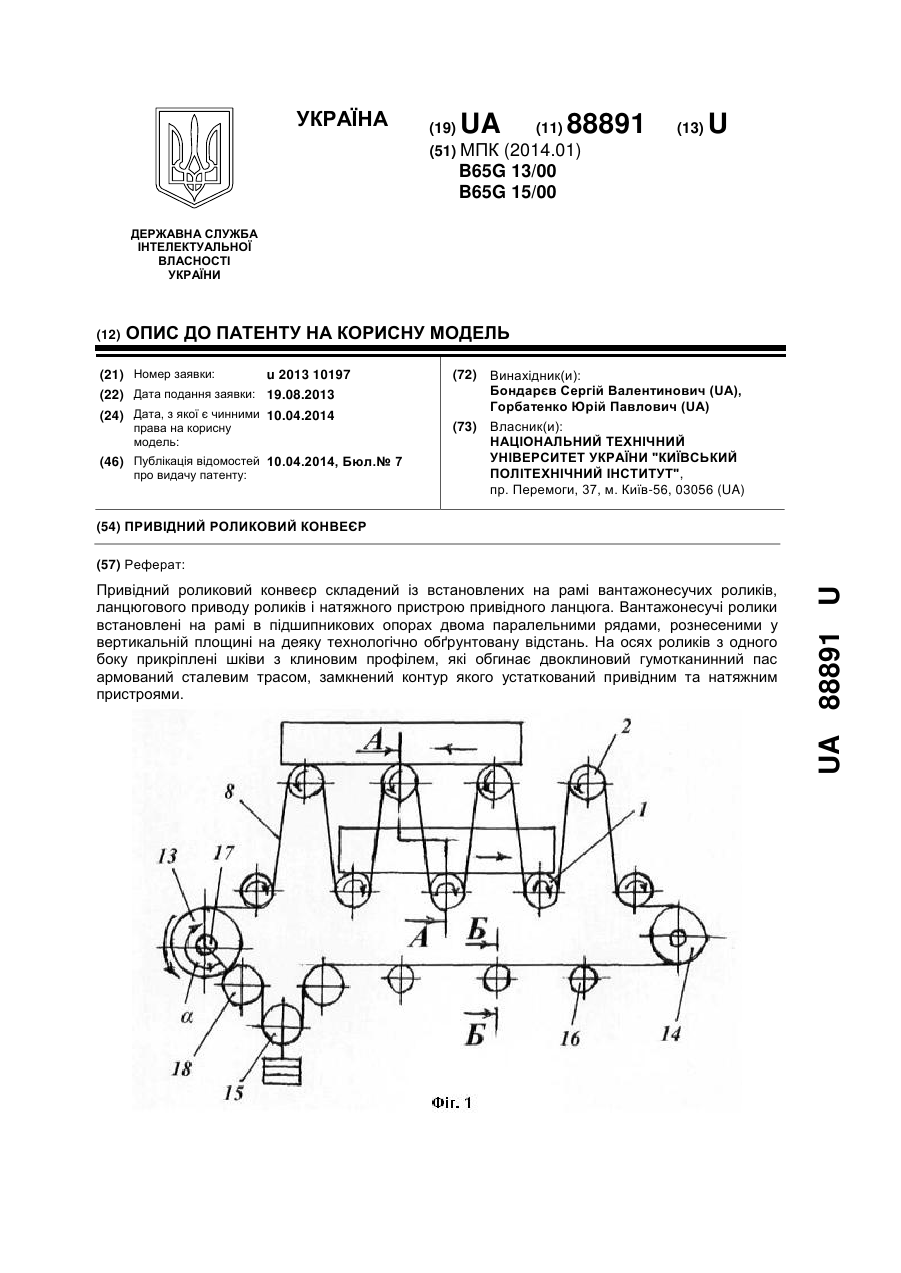
Номер патенту: 88891
Опубліковано: 10.04.2014
Автори: Горбатенко Юрій Павлович, Бондарєв Сергій Валентинович
МПК: B65G 13/00, B65G 15/00
Мітки: конвеєр, привідний, роликовий
Формула / Реферат:
Привідний роликовий конвеєр, що містить встановлені на рамі вантажонесучих роликів, ланцюговий привід роликів і натяжний пристрій привідного ланцюга, який відрізняється тим, що вантажонесучі ролики встановлені на рамі в підшипникових опорах двома паралельними рядами, рознесеними у вертикальній площині на деяку технологічно обґрунтовану відстань, при цьому на осях роликів з одного боку прикріплені шківи з клиновим профілем, які обгинає...
Попередній патент: Спосіб прецизійної обробки отворів підшипників ковзання з важкооброблюваних композитних матеріалів для поліграфічної техніки
Наступний патент: Спосіб переробки фосфогіпсу в комплексне добриво з використанням напівпродукту виробництва екстракційної фосфатної кислоти
Випадковий патент: Електрофільтр