Стебло плавцевого рушія

Формула / Реферат
1. Стебло плавцевого рушія, виконане у вигляді еластичного телескопічного важеля, закріпленого на водилі, на якому встановлена коробчаста горизонтальна планка,поєднана на кінцях з тягами, які приводяться в коливальний рух в горизонтальній площині, який відрізняється тим, що стебло складається із поступово зменшуваних конструктивно однакових овальних в поперечному перерізі секцій, зв'язаних за допомогою сферичних шарнірів, через які по центру проходять системи тяг, що міцно з'єднують всі секції стебла, причому центральні сферичні шарніри вгвинчуються у відповідні центральні отвори у всіх секціях з одного боку, а шарова частина цих шарнірів обертається в сферичному поглибленні, що розташована з другого боку сусідньої секції, при цьому по площині поперечного перерізу секцій встановлено такі ж самі з'єднання меншого розміру, розміщених навкруги основних центральних сферичних шарнірів та двох отворів, що виконані для зменшення ваги по краях овального перерізу; кожна секція по торцях має скоси так, що пара сусідніх секцій від центру до периферичної точки при горизонтальному положенні стебла відхиляється один від одного від центру секції до її краю на 5°; в кінці стебла встановлений обтічний кронштейн, у якому закріплена обтічна пластина, на кінці якої встановлюється підпружинний плавцевий рушій, який можна також безпосередньо закріплювати в кронштейні.
2. Стебло плавцевого рушія за п. 1, яке відрізняється тим, що в залежності від заданої траєкторії коливання стебла натяг в тросах забезпечується за допомогою електронної системи керування.
3. Стебло плавцевого рушія за п. 1, яке відрізняється тим, що замість тросів можуть бути встановлені електромагнітні соленоїди.
Текст
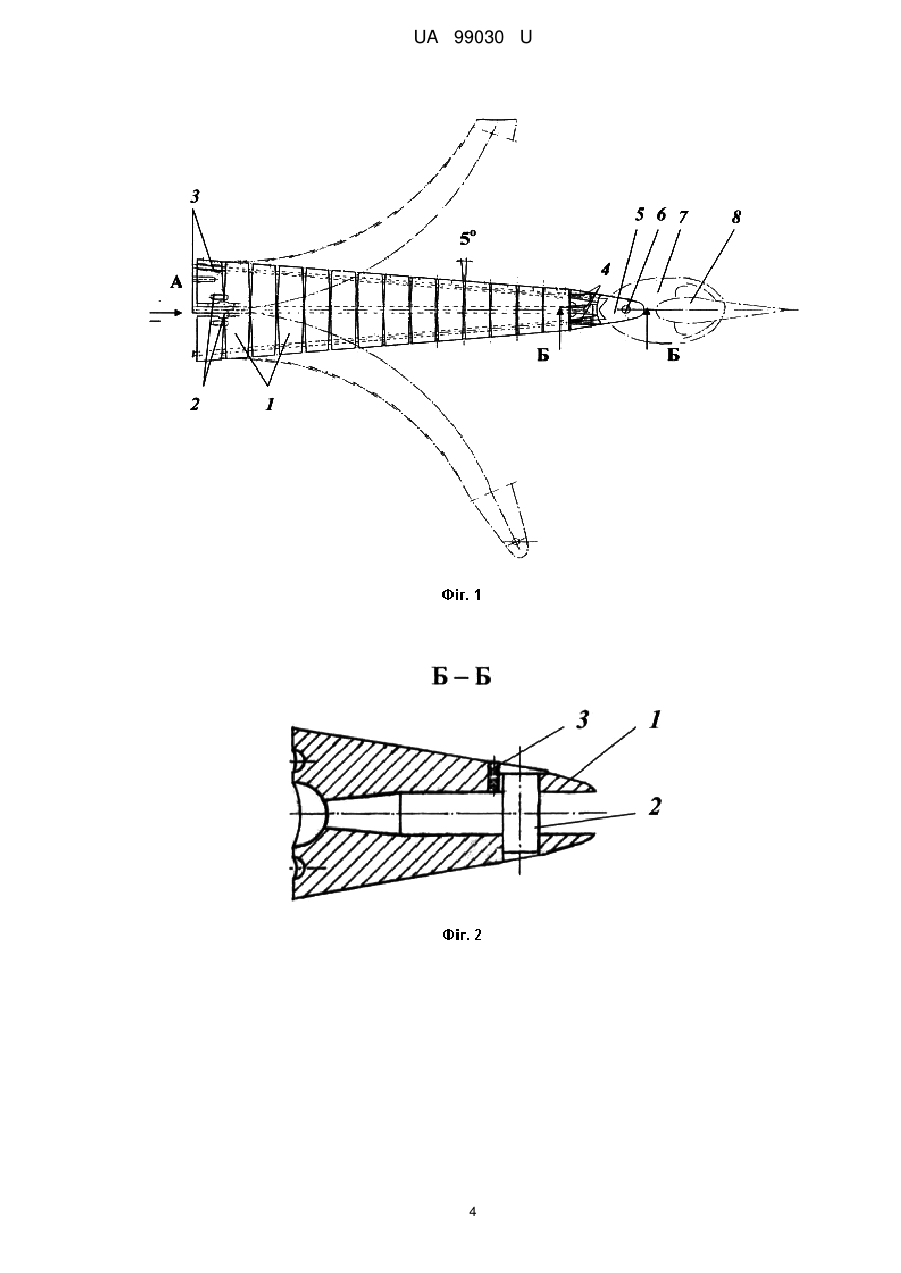
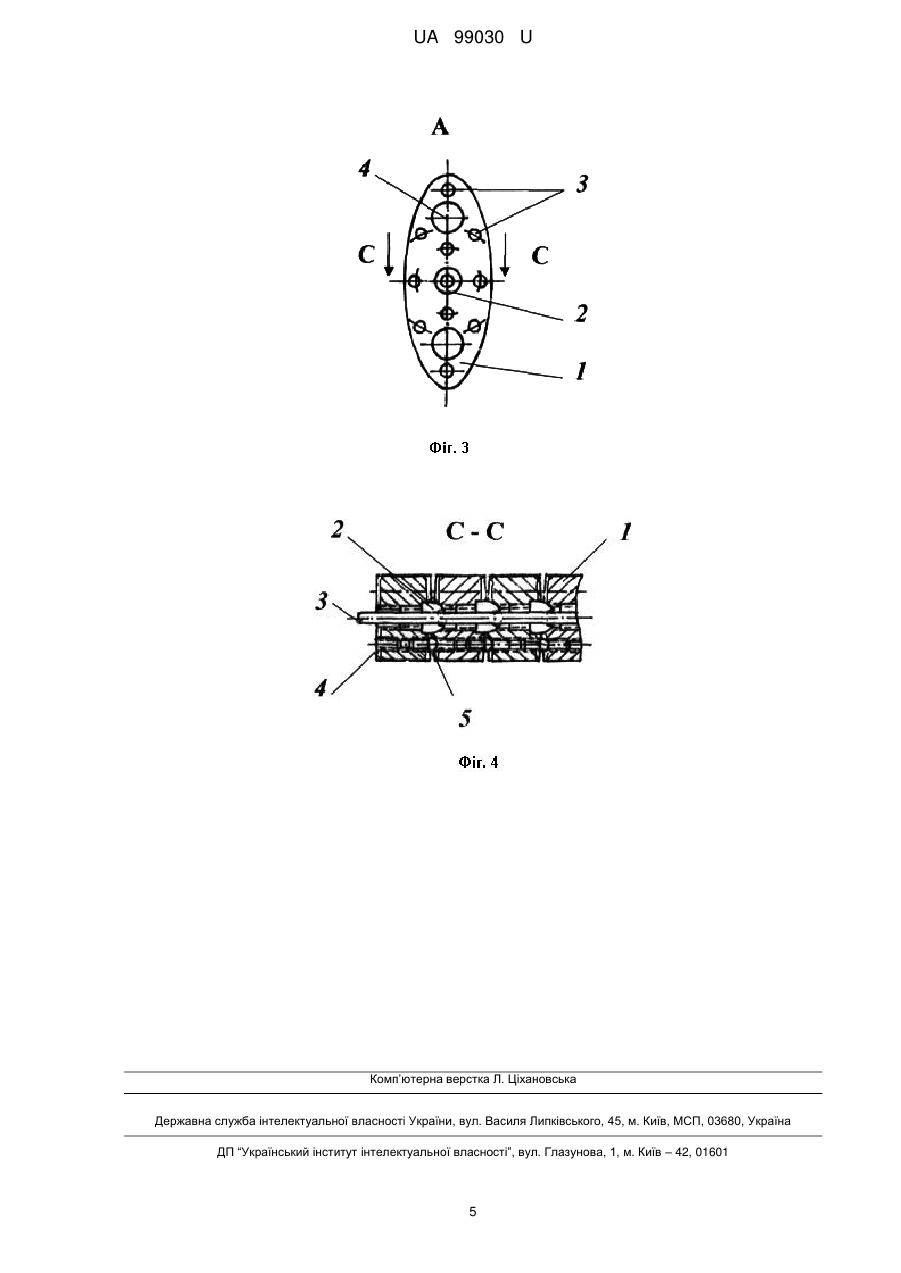
Реферат: UA 99030 U UA 99030 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до області суднобудування і може бути використаний при проектуванні та створенні плавцевих рушіїв. Багато років проводяться експериментальні та теоретичні досліди особливостей будови морфології рухового апарата різних видів водних тварин. Наприклад, в [1] наведені кінематика плавання водних тварин, гідродинамічна теорія плавання швидкісних риб, китоподібних і кальмарів, а також деякі особливості будови хвостових плавців. В стеблі водних тварин в осьовій частині розташовані хвостові хребці, які оточені по периферії мускулатурою, яка кріпиться за допомогою сухожиль до кожного хребця. Основна рухова мускулатура призначена до створення тяги хвостового плавця. Менш потужна мускулатура дозволяє змінювати напрям коливання хвостового плавця, що забезпечує ефективне маневрування при плаванні водної тварини. Дослідження кінематики плавання показало, що хвостовий плавець рухається по синусоїдальній траєкторії, а стебло є гнучкою структурою і може згинатися в різних напрямках. У різних країнах зареєстровані патенти конструкцій плавцевих рушіїв. Відомий підводний апарат з плавцевим рушієм [2], в носовій і кормовій частинах якого розміщені електродвигуни, на вихідному валу електродвигуна, розміщеного в носовій частині підводного апарата, закріплений з можливістю його повороту на 180° кронштейн з поперечкою, на обох боках якої встановлені крила, а в прорізу кормової частини є кронштейн з електродвигуном, на осі якого закріплено стебло з плавцевим рушієм. Недоліком цієї розробки є жорстка конструкція стебла. Найбільш близьким по технічній суті до винаходу "Стебло плавцевого рушія", що заявляється, є прийнятий за прототип авторське свідоцтво СССР "Плавниковый движитель для лодок" [3], що містить плавець у формі крила малого подовження з дугоподібною задньою кромкою і змінною пружністю по довжині, і пов'язаний з плавцем підпружинний важіль, який кінематичне взаємодіє з ножним приводом, що включає в себе педалі, і кінематично пов'язаних механізмом передачі з плавцем, причому механізм передачі ножного приводу забезпечений водилом, регульованою центральною і бічною тягами, муфтою, вертикальним валом для плавця і коробчастими хомутами, при цьому підпружинний важіль виконаний телескопічним з рядом поперечних отворів, на якому з можливістю фіксації в поперечних отворах встановлена муфта, пов'язана з регульованою центральною тягою. Недоліком прототипу є то, що плавцевий рушій призначений тільки для надводних апаратів з приводом у вигляді м'язової сили ніг. В основу корисної моделі поставлена задача розробки ефективної принципово нової конструкції стебла плавцевого рушія, який враховує не тільки деякі риси прототипу, а також включає принципи функціонування і морфологію стебла водних тварин, крім того, запропоноване стебло можна застосувати для будь-яких підводних і надводних апаратів. Поставлена задача вирішується тим, що стебло містить поступово зменшувані конструктивно однакові овальні в поперечному перерізі секції, зв'язаних за допомогою сферичних шарнірів, через які по центру проходять системи тяг, що міцно з'єднують всі секції стебла, причому центральні сферичні шарніри вгвинчуються у відповідні центральні отвори у всіх секціях з одного боку, а шарова частина цих шарнірів обертається в сферичному поглибленні, що розташована з другого боку сусідньої секції, при цьому по площині поперечного перерізу секцій встановлено такі ж самі з'єднання меншого розміру, розміщених навкруги основних центральних сферичних шарнірів та двох отворів, що виконані для зменшення ваги по краях овального перерізу; кожна секція по торцях має скоси так, що пара сусідніх секцій від центру до периферичної точки при горизонтальному положенні стебла відхиляється один від одного від центру секції до її краю на 5°; в кінці стебла встановлений обтічний кронштейн, у якому закріплена обтічна пластина, на кінці якої встановлюється підпружинний плавцевий рушій, який можна також безпосередньо закріплювати в кронштейні. В залежності від заданої траєкторії коливання стебла натяг в тросах забезпечується за допомогою електронної системи керування. Крім того, замість тросів можуть бути встановлені електромагнітні соленоїди. Суть корисної моделі пояснює креслення. Фіг. 1 представляє вигляд збоку гнучкого стебла плавникового рушія, який коливається у вертикальній площині. Фіг. 2 представляє поперечний переріз Б-Б згідно з фіг. 1. Фіг. 3 показує вигляд А зліва на стебло плавникового рушія згідно з фіг. 1. Фіг. 4 представляє поперечний переріз С-С згідно з фіг. 2. На фіг. 1 наведено вигляд збоку запропонованого стебла плавцевого рушія, який складається з поступово зменшуваних конструктивно однакових овальних в поперечному перерізі секцій 1, зв'язаних за допомогою сферичних шарнірів 2, через які проходять системи тросових тяг 3, що міцно з'єднують всі секції стебла, причому кожна секція по торцях має скоси 1 UA 99030 U 5 10 15 20 25 30 35 40 45 50 55 60 так, що кожна пара сусідніх секцій від центру до периферичної точки при горизонтальному положенні стебла відхиляється один від одного на 5°. В кінці стебла встановлений обтічний кронштейн 5, з'єднаний за допомогою кінцевих закладань 4 тросів з секціями 1 стебла. У кронштейні 5 закріплена за допомогою пальця 6 обтічна пластина 7 в якій закріплений підпружинний плавцевий рушій 8, або в кронштейні 5 безпосередньо закріплюється підпружинний плавцевий рушій 8. На фіг. 2 наведено поперечний переріз Б-Б (фіг. 1) обтічного кронштейна 1, на якому зліва показано шарові заглиблення для розміщення відповідних сферичних шарнірів 2 тросових з'єднань секцій 1 та кінцевих закладань 4 тросів (фіг. 1). Праворуч на фіг. 2 зображено палець 2, який встановлений в обтічному кронштейні 1 та закріплений за допомогою шпильки 3. На фіг. 3 наведено вигляд А на секцію 1 згідно з фіг. 1. По центру секції 1 зображено центральний сферичний шарнір 2, в центрі якого зображений поперечний переріз відповідного центрального троса. Меншими колами зображені відповідно менші сферичні шарніри 3, скрізь які проходять периферичні троси. Для зменшення ваги і економії матеріалу виконані отвори 4. На фіг. 4 наведено поперечний переріз С-С згідно з фіг. 3. Секції 1 з'єднані між собою по центру шарнірами 2, які вгвинчуються у відповідні секції 1 таким чином, що сферична частина шарніра обертається в сферичному поглибленні сусідньої секції 1, а по центру шарнірів проходить центральний трос 3. Навколо центральної осі секцій 1 проходять подібні з'єднання меншого розміру у вигляді периферичних тросів 4 і шарнірів 5. Такі ж самі з'єднання меншого розміру показано по три зверху та знизу на фіг. 3. Запропонований пристрій працює наступним чином. У торцевих сторонах кожної секції 1 виконані заглиблення так, що торці ззовні мають гостру кромку (фіг. 4). Як показано на фіг. 1, торцеві кромки сусідніх секцій при горизонтальному положенні стебла відхиляються одне від одного від центральної повздовжньої осі до зовнішнього контуру стебла на 5°. При максимальній амплітуді коливання стебла сусідня наступна секція, що має менші розміри, своїми торцевими кромками можуть частково входить у уступ попередньої секції, що має більш великі розміри. Це дозволяє при невеликому значенні кута в 5° виконати максимальне відхилення кінцевої частини стебла, до якої закріплюється обтічна пластина 7 або плавцевий рушій 8 (фіг. 1). Центральний трос та всі периферичні троси (фіг. 3) ліворуч від стебла (фіг. 1) приєднуються до механічної системи, яка приводиться в рух за допомогою пристрою [4] і управляється за допомогою електронної системи (на фіг. 1 не показано). Ззовні стебло має еластичне покриття згідно з, наприклад, [5], а ззаду на ньому закріплений плавцевий рушій, наприклад [6]. Найпростіший режим роботи стебла - це коливання плавникового рушія з постійною максимальною амплітудою при малій швидкості руху в горизонтальному напрямку. У цьому випадку за допомогою пристрою [4] поперемінно натягуються крайні верхній і нижній троси (фіг. 3). Відомо [1], що у водних тварин, наприклад, при плаванні швидкісних риб чи китоподібних амплітуда і частота коливання хвостового плавця залежать від швидкості плавання: чим більше швидкість, тим менше амплітуда і більше частота коливання. Крім того, невеликий крен хвостового плавця приводить до появи обертального моменту і ефективного маневрування. При зростанні швидкості руху зростає гідродинамічний опір і відповідно напруга в тросах. В цьому випадку, наприклад, при напрямку руху плавцевого рушія вгору (фіг. 1) електронна система керування механічною системою приводить за допомогою пристрою [4] до швидкого натягування чотирьох крайніх периферичних тросів, що розташовані на фіг. 3 зверху близько верхнього отвору 4. Після невеликого відхилення стебла вгору електронна система підключає в роботу центральний трос и два периферійних троси, розташованих горизонтально поруч з центральним тросом. Всі інші троси, що розташовані знизу на фіг. 3 підпружинні, але легко розтягуються і не створюють опору переміщенню стебла вгору. При досягненні максимальної амплітуди відхилення стебла електронна система відключає натяг всіх зазначених тросів. Через деякий невеликий проміжок часу, коли підпружинний плавцевий рушій займе горизонтальне положення електронна система включає натяг чотирьох крайніх периферичних тросів, що розташовані на фіг. 3 знизу близько нижнього отвору 4. Як тільки стебло пройде горизонтальну площину руху знову вмикається натяг на центральний трос и два периферійних троси, розташованих горизонтально поруч з центральним тросом. При необхідності маневрування в процесі руху, наприклад, при напрямку руху плавцевого рушія вгору (фіг. 1) електронна система керування механічною системою відключає натяг, наприклад, в периферійному тросі, що розташовані праворуч біля верхнього отвору 4 (фіг. 3), а після невеликого відхилення стебла вгору електронна система відключає натяг периферійного троса, розташованого горизонтально поруч з центральним тросом праворуч. В цьому випадку стебло повертається праворуч відносно прямолінійного руху, виникає також крен на плавцевому рушії, внаслідок чого рух змінюється з прямолінійного на рух праворуч. Таким же 2 UA 99030 U 5 10 15 20 25 30 35 40 чином можна відключати натяг пари периферійних тросів зверху або знизу в залежності від фази коливання стебла при заданій траєкторії руху. Якщо стебло повернути на 90°, то його коливання будуть відбуватися в горизонтальній площині руху. Джерела інформації: 1. Л.Ф. Козлов. Теоретическая био-гидродинамика. - Киев: "Вища школа". - 1983. – 239 с. 2. Деклараційний патент на винахід України № 41616 А МПК В63Н1/36, В63В3/13. Підводний апарат з плавцевим рушієм. Автори - Поліщук С.В., Бабенко В.В., Коробов В.I., Мороз В.В., Мартиненко Ф.І. Опубліковано 17.09.2001. Бюл. № 8. 3. Авторское свидетельство СССР № 796074 МПК В63Н1/36. Плавниковый движитель для лодок. Авторы - Тарасенко В.Ф., Бабенко В.В., Гапоненко В.В., Давыдов Н.В. Опубликовано 15.01.81. Бюл. № 2. 4. Авторское свидетельство СССР № 1671515 МПК В63Н1/36. Плавниковый движитель. Авторы - Коробов В.И., Бабенко В.В., Белинский В.Г. Опубликовано 23.08.91. Бюл. № 31. 5. Авторское свидетельство СССР № 597866 МПК F15D1/12. Регулируемое демпфирующее покрытие. Авторы - Бабенко В.В., Козлов Л.Ф., Коробов В.И. Опубликовано 15.03.78. Бюл. № 10. 6. Авторское свидетельство СССР № 529104 МПК В63Н1/36, В63В1/32. Плавниковый движитель. Автор - Бабенко В.В. Опубликовано 25.09.76. Бюл. № 35. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 1. Стебло плавцевого рушія, виконане у вигляді еластичного телескопічного важеля, закріпленого на водилі, на якому встановлена коробчаста горизонтальна планка, поєднана на кінцях з тягами, які приводяться в коливальний рух в горизонтальній площині, який відрізняється тим, що стебло складається із поступово зменшуваних конструктивно однакових овальних в поперечному перерізі секцій, зв'язаних за допомогою сферичних шарнірів, через які по центру проходять системи тяг, що міцно з'єднують всі секції стебла, причому центральні сферичні шарніри вгвинчуються у відповідні центральні отвори у всіх секціях з одного боку, а шарова частина цих шарнірів обертається в сферичному поглибленні, що розташована з другого боку сусідньої секції, при цьому по площині поперечного перерізу секцій встановлено такі ж самі з'єднання меншого розміру, розміщених навкруги основних центральних сферичних шарнірів та двох отворів, що виконані для зменшення ваги по краях овального перерізу; кожна секція по торцях має скоси так, що пара сусідніх секцій від центру до периферичної точки при горизонтальному положенні стебла відхиляється один від одного від центру секції до її краю на 5°; в кінці стебла встановлений обтічний кронштейн, у якому закріплена обтічна пластина, на кінці якої встановлюється підпружинний плавцевий рушій, який можна також безпосередньо закріплювати в кронштейні. 2. Стебло плавцевого рушія за п. 1, яке відрізняється тим, що в залежності від заданої траєкторії коливання стебла натяг в тросах забезпечується за допомогою електронної системи керування. 3. Стебло плавцевого рушія за п. 1, яке відрізняється тим, що замість тросів можуть бути встановлені електромагнітні соленоїди. 3 UA 99030 U 4 UA 99030 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: рушія, плавцевого, стебло
Код посилання
<a href="https://ua.patents.su/7-99030-steblo-plavcevogo-rushiya.html" target="_blank" rel="follow" title="База патентів України">Стебло плавцевого рушія</a>
Спосіб оптимізації роботи судового плавцевого рушія
Номер патенту: 14940
Опубліковано: 04.03.1997
Автори: Довгий Станіслав Олексійович, Каян Володимир Павлович, Шеховцов Олександр Володимирович
МПК: B63H 1/36
Мітки: рушія, судового, спосіб, плавцевого, оптимізації, роботи
Формула / Реферат:
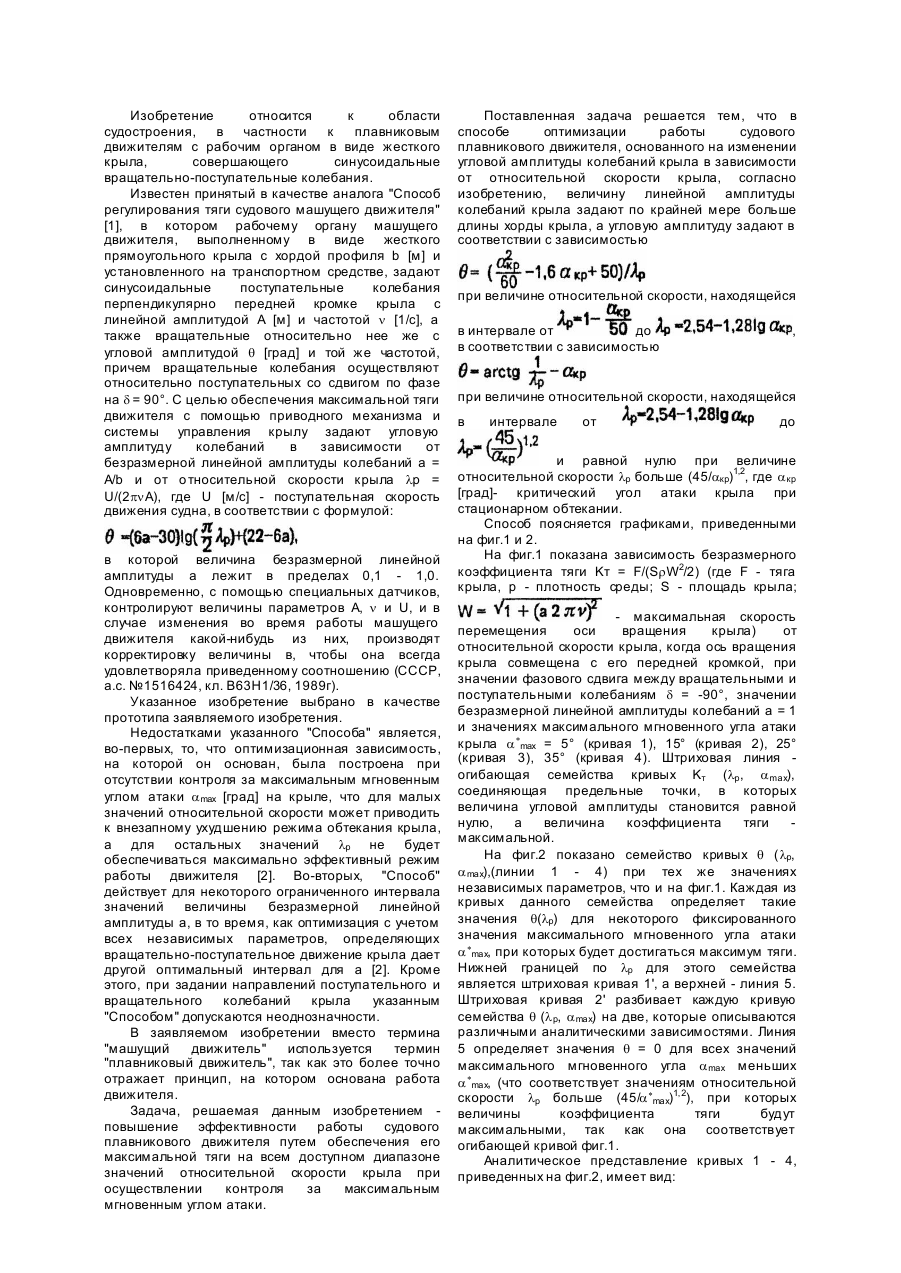
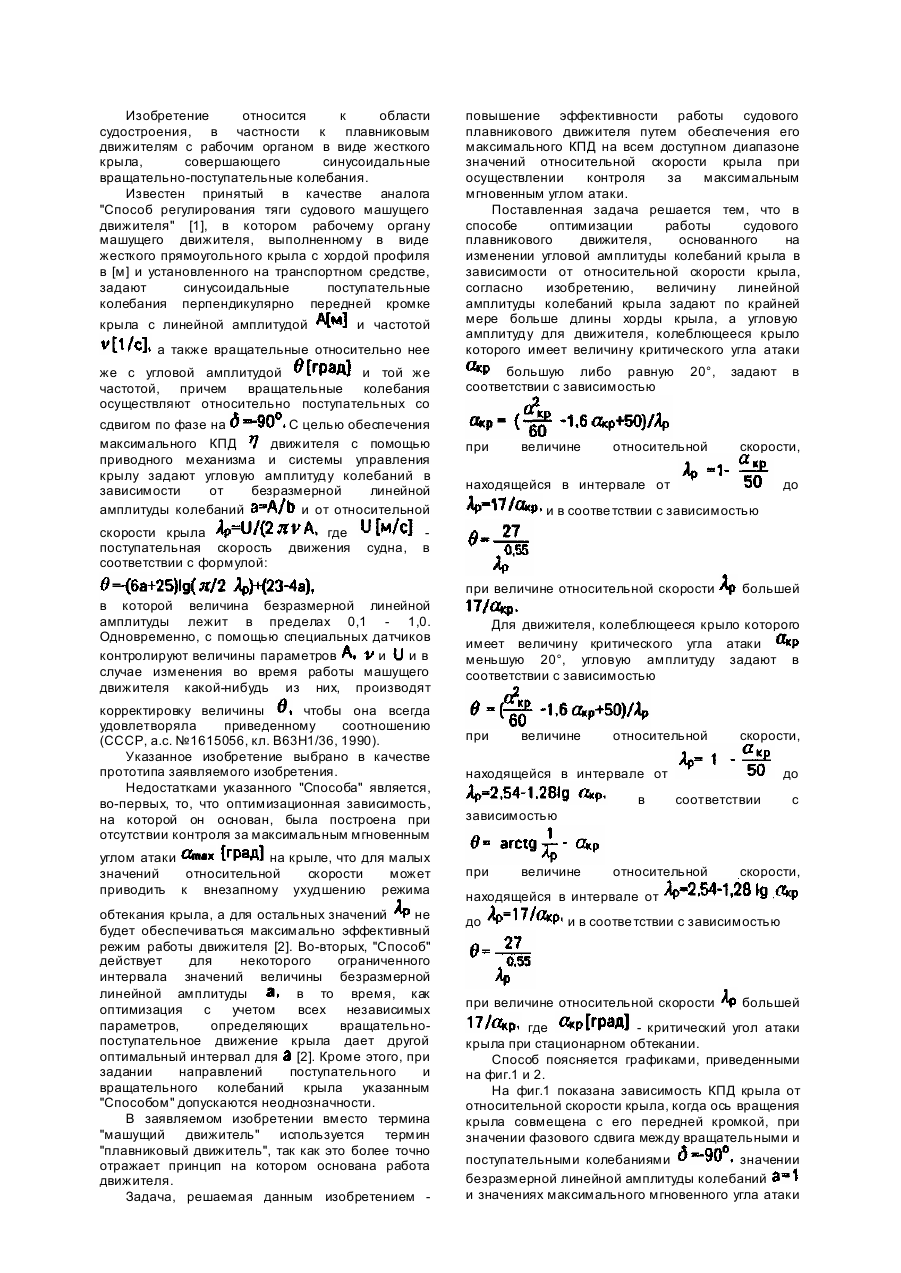
Способ оптимизации работы судового плавникового движителя, основанный на изменении угловой амплитуды колебаний крыла в зависимости от относительной скорости крыла, отличающийся тем, что величину линейной амплитуды колебаний крыла задают по крайней мере больше длины хорды крыла, а угловую амплитуду задают в соответствии с зависимостьюпри величине относительной скорости, находящейся в интервале от до , в...
Спосіб оптимізації роботи судового плавцевого рушія
Номер патенту: 14941
Опубліковано: 04.03.1997
Автори: Довгий Станіслав Олексійович, Шеховцов Олександр Володимирович
МПК: B63H 1/36
Мітки: спосіб, оптимізації, рушія, судового, роботи, плавцевого
Формула / Реферат:
Способ оптимизации работы судового плавникового движителя, основанный на изменении угловой амплитуды колебаний крыла в зависимости от относительной скорости крыла, отличающийся тем, что величину линейной амплитуды колебаний крыла задают по крайней мере больше длины хорды крыла, а угловую амплитуду задают в соответствии с зависимостьюпри величине относительной скорости, находящейся в интервале от до и в...
Спосіб оптимізації роботи судового плавцевого рушія
Номер патенту: 14811
Опубліковано: 18.02.1997
Автори: Довгий Станіслав Олексійович, Шеховцов Олександр Володимирович, Каян Володимир Павлович
МПК: B63H 1/36
Мітки: рушія, плавцевого, оптимізації, судового, роботи, спосіб
Формула / Реферат:
1. Способ оптимизации работы судового плавникового движителя, основанный на изменении угловой амплитуды колебаний крыла в зависимости от относительной скорости крыла, отличающийся тем, что величину линейной амплитуды колебаний крыла задают по крайней мере больше длины хорды крыла, а угловую амплитуду для движителя, колеблющееся крыло которого имеет величину критического угла атаки a кр большую либо равную 20°, задают в соответствия с...
Стенд для дослідження гусеничного рушія
Номер патенту: 57935
Опубліковано: 25.03.2011
Автори: Єпіфанов Віталій Валерійович, Воронцов Сергій Миколайович
МПК: G01M 17/03
Мітки: стенд, гусеничного, дослідження, рушія
Формула / Реферат:
Стенд для дослідження гусеничного рушія, що містить плиту, на якій розміщені підтримувальні та підресорені опорні котки, ведуче та напрямне колеса, охоплені гусеницею, привід ведучого колеса; другий привід для пересування плити, що складається з двигуна, шарнірно з'єднаних з нерухомою опорою кривошипів і вертикальних штанг, які з'єднують плиту з вказаними кривошипами, та горизонтальної штанги, що з'єднує плиту з нерухомою опорою; опорні...
Стенд для дослідження гусеничного рушія
Номер патенту: 69063
Опубліковано: 25.04.2012
Автори: Воронцов Сергій Миколайович, Єпіфанов Віталій Валерійович
МПК: G01M 17/03
Мітки: рушія, дослідження, гусеничного, стенд
Формула / Реферат:
Стенд для дослідження гусеничного рушія, що містить плиту, на якій розміщені підтримувальні та підресорені опорні котки, ведуче та напрямне колеса, охоплені гусеницею, привід ведучого колеса; другий привід для пересування плити, що складається з двигуна, шарнірно з'єднаних з нерухомою опорою кривошипів і вертикальних штанг, які з'єднують плиту з вказаними кривошипами; встановлені на нерухомій опорі опорні барабани, охоплені гнучкою стрічкою,...
Попередній патент: Спіраль архімеда для очищення газу й повітря
Наступний патент: Генератор бульбашок для підводних апаратів
Випадковий патент: Спосіб виробництва вафель з желейною начинкою та спосіб виробництва желейної маси