Спосіб автоматичного керування розрідженням в топці котла
Номер патенту: 99748
Опубліковано: 25.06.2015
Автори: Трубніков Валерій Анатолійович, Хобін Віктор Андрійович


Формула / Реферат
1. Спосіб автоматичного керування розрідженням в топці, що включає вимірювання величини розрідження в топці котла, вимірювання величини тиску повітря в запальному пристрої котла, порівняння величини розрідження із заданим значенням і стабілізацію розрідження на заданому значенні зміною витрат продуктів згоряння, що видаляються, порівняння величини розрідження з її граничнодопустимим значенням і, при виникненні аварійної ситуації, коли величина розрідження стає менше граничнодопустимого значення, вмикання аварійного захисту, який відрізняється тим, що в мінливих умовах роботи топки додатково коригують задане значення розрідження, встановлюючи його, для поточних мінливих умов роботи котла, мінімально допустимим і одночасно таким, щоб при мінливих характеристиках коливань розрідження щодо такого заданого значення, аварійна ситуація не виникала.
2. Спосіб за п. 1, який відрізняється тим, що коригування заданого значення розрідження ведуть на основі імовірнісного підходу, встановлюючи його таким, щоб при мінливих характеристиках коливань розрідження щодо мінімально допустимого заданого значення аварійна ситуація не виникала із заданою вірогідністю для заданого інтервалу часу, для чого додатково задають інтервал часу, значно менший, ніж час роботи топки, задають для цього інтервалу часу бажане значення вірогідності відсутності на ньому аварійної ситуації, за прийнятою математичною моделлю перераховують його в допустиме значення частоти виникнення аварійних ситуацій, по виміряних значеннях розрідження в топці розраховують, на ковзному заданому інтервалі часу, оцінки імовірнісних характеристик коливань розрідження (зокрема математичних очікувань і середньоквадратичних відхилень розрідження і швидкості його зміни), за прийнятою математичною моделлю і за значеннями розрахованих оцінок розраховують оцінку поточного значення частоти виникнення аварійних ситуацій, порівнюють її з допустимим значенням цієї частоти і, змінюючи задане значення розрідження, стабілізують оцінку поточної частоти виникнення аварійних ситуацій на її допустимому значенні.
3. Спосіб за п. 2, який відрізняється тим, що розрахунок допустимого значення частоти виникнення аварійної ситуації ведуть з математичної моделі:
![]() ,
,
де: ![]() - задане значення вірогідності відсутності аварійної ситуації на інтервалі часу
- задане значення вірогідності відсутності аварійної ситуації на інтервалі часу ![]() , коли величина розрідження
, коли величина розрідження ![]() знижується нижче його граничнодопустимого значення
знижується нижче його граничнодопустимого значення ![]() ;
;
нижні індекси ![]() і
і ![]() - позначають події, пов'язані відповідно з виникненням аварійної ситуації і з її відсутністю; розрахунок оцінки поточного значення частоти виникнення аварійних ситуацій ведуть з математичної моделі:
- позначають події, пов'язані відповідно з виникненням аварійної ситуації і з її відсутністю; розрахунок оцінки поточного значення частоти виникнення аварійних ситуацій ведуть з математичної моделі:
де: ![]() - інтеграл імовірності та його похідна для нормального закону розподілу імовірностей;
- інтеграл імовірності та його похідна для нормального закону розподілу імовірностей;
![]() ,
, ![]() - оцінки середньоквадратичних відхилень розрідження і швидкості його зміни як випадкових процесів, обчислювані на ковзному інтервалі часу
- оцінки середньоквадратичних відхилень розрідження і швидкості його зміни як випадкових процесів, обчислювані на ковзному інтервалі часу ![]() ;
;
![]() ,
, ![]() - оцінки мінливого математичного очікування і його першої похідної, обчислювані на ковзному інтервалі часу
- оцінки мінливого математичного очікування і його першої похідної, обчислювані на ковзному інтервалі часу ![]() .
.
Текст
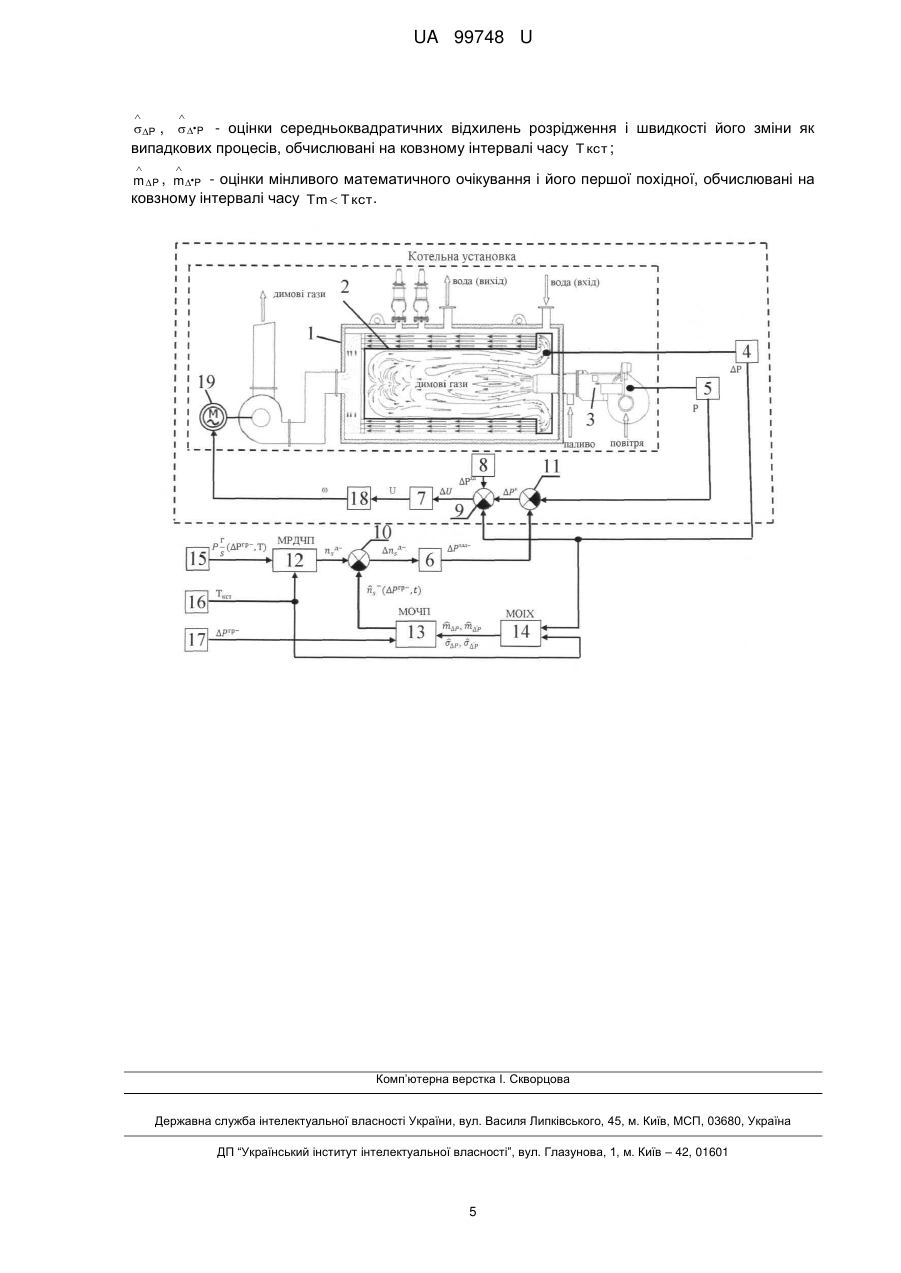
Реферат: UA 99748 U UA 99748 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до теплоенергетики і може бути використана в системах автоматичного управління паровими або водогрійними котлами, зокрема в системах автоматичного керування розрідженням в топці котла. Відомий спосіб автоматичного керування розрідженням в топці котла, який реалізовано в системі автоматичного керування розрідженням, на основі регулятора, яка використовує інформацію однієї змінної - розрідження в топці котла та формує сигнал управління на зміну витрат продуктів згоряння, що видаляються, який реалізується різними технологічними пристроями: а) зміна положення дросельної заслінки (див. Плетнев Г.П. Автоматизированное управление объектами тепловых электростанций. - М.: Энергоиздат, 1981. - С. 241), б) зміна положення напрямного апарата (див. Шафрановский В.А. Справочник наладчика автоматики котельных установок. - Симферополь: Таврия, 1987. - С. 154-172), в) зміна частоти обертання димососа (див. патент Російської федерації № 2247900, МПК F23N 1/02, 10.03.2005). Відповідно до цього способу, встановлюється задане значення розрідження, вимірюється величина розрідження, порівнюється із заданим значенням і стабілізується на заданому значенні, зміною витрат продуктів згоряння, що видаляються і, при виникненні аварійної ситуації, коли величина розрідження стає менше граничнодопустимого значення, вмикається аварійний захист та припиняється подача палива. Відомий, розглянутий вище, спосіб (аналог) має із способом, що заявляється, такі загальні операції: вимірювання величини розрідження в топці котла, порівняння величини розрідження з її заданим значенням і стабілізація розрідження на заданому значенні зміною витрат продуктів згоряння, що видаляються, і, при виникненні аварійної ситуації, коли величина розрідження стає менше граничнодопустимого значення, вмикання аварійного захисту та припинення подачі палива. Недоліком цього способу є низька ефективність роботи котла за рахунок підвищених втрат тепла з димовими газами. Це пояснюється тим, що задане значення розрідження встановлюють таким, щоб коливання розрідження, щодо цього значення не опускалися нижче граничнодопустимого значення. Це призводить до підвищення присосів повітря в топку, їх нагрівання і видалення з димовими газами. Найбільш близьким аналогом є спосіб автоматичного керування розрідженням в топці котла, який реалізовано в системі автоматичного керування розрідженням, на основі регулятора, який використовує інформацію двох змінних - розрідження газів в топці котла і тиск повітря в запальному пристрої котла та формує сигнал управління на зміну витрат продуктів згоряння, що видаляються (Бузников Е.Ф., Раддатис К.Ф., Берзиньш Э.Я. Производственные и отопительные котельные. - М.: Энергоиздат, 1984. - С. 222-235). Відповідно до цього способу, встановлюється задане значення розрідження, вимірюється величина розрідження в топці котла, вимірюється величина тиску повітря в запальному пристрої котла, величина розрідження порівнюється із заданим значенням і стабілізується на заданому значенні, зміною витрат продуктів згоряння, що видаляються і, при виникненні аварійної ситуації, коли величина розрідження стає менше граничнодопустимого значення, вмикається аварійний захист та припиняється подача палива. Найближчий аналог і спосіб, який заявляється, мають наступні спільні операції: вимірювання величини розрідження в топці котла, вимірювання величини тиску повітря в запальному пристрої котла, порівняння величини розрідження з її заданим значенням і стабілізація розрідження на заданому значенні, зміною витрат продуктів згоряння, що видаляються, і, при виникненні аварійної ситуації, коли величина розрідження стає менше граничнодопустимого значення, вмикання аварійного захисту та припинення подачі палива. Недоліком цього способу є низька ефективність роботи котла за рахунок підвищених втрат тепла з димовими газами. Це пояснюється тим, що задане значення розрідження встановлюють таким, щоб коливання розрідження, щодо цього значення не опускалися нижче граничнодопустимого значення. Це призводить до підвищення присосів повітря в топку, їх нагрівання і видалення з димовими газами. В основу корисної моделі поставлено задачу створити спосіб автоматичного керування розрідженням в топці котла, в якому шляхом зменшення втрат тепла з димовими газами, забезпечується підвищення ефективності роботи котла. Поставлена задача вирішується в запропонованому способі, який включає вимірювання величини розрідження в топці котла, вимірювання величини тиску повітря в запальному пристрої котла, порівняння величини розрідження із заданим значенням і стабілізацію розрідження на заданому значенні зміною витрат продуктів згоряння, що видаляються, порівняння величини розрідження з її граничнодопустимим значенням і, при виникненні аварійної ситуації, коли величина розрідження стає менше граничнодопустимого значення, вмикання аварійного захисту, згідно з корисною моделлю, в мінливих умовах роботи топки 1 UA 99748 U 5 10 15 20 додатково коригують задане значення розрідження, встановлюючи його, для поточних мінливих умов роботи топки, мінімально допустимим і одночасно таким, щоб при мінливих характеристиках коливань розрідження щодо такого заданого значення, аварійна ситуація не виникала. Коригування заданого значення розрідження ведуть на основі імовірнісного підходу, встановлюючи його таким, щоб при мінливих характеристиках коливань розрідження щодо мінімально допустимого заданого значення аварійна ситуація не виникала із заданою вірогідністю для заданого інтервалу часу, для чого додатково задають інтервал часу, значно менший, ніж час роботи топки, задають для цього інтервалу часу бажане значення вірогідності відсутності на ньому аварійної ситуації, за прийнятою математичною моделлю перераховують його в допустиме значення частоти виникнення аварійних ситуацій, по виміряних значеннях розрідження в топці розраховують, на ковзному заданому інтервалі часу, оцінки імовірнісних характеристик коливань розрідження (зокрема математичних очікувань і, середньоквадратичних відхилень розрідження і швидкості його зміни), за прийнятою математичною моделлю і за значеннями розрахованих оцінок, розраховують оцінку поточного значення частоти виникнення аварійних ситуацій, порівнюють її з допустимим значенням цієї частоти, і, змінюючи задане значення розрідження, стабілізують оцінку поточної частоти виникнення аварійних ситуацій на її допустимому значенні. Розрахунок допустимого значення частоти виникнення аварійної ситуації ведуть з математичної моделі: д ns 1 lnPзд( Pгр , T ) s T , Pзд(Pгр, T) де: s - задане значення вірогідності відсутності аварійної ситуації на інтервалі часу T , коли величина розрідження P знижується нижче його граничнодопустимого значення Pгр ; 25 нижні індекси S і S - позначають події, пов'язані відповідно з виникненням аварійної ситуації і з її відсутністю. Розрахунок оцінки поточного значення частоти виникнення аварійних ситуацій ведуть з математичної моделі: 2 гр P m P t 1 n ( Pгр , T ) exp signP 2 2 P P m P t m P t m P t exp Ф 2 , P P t P t P Ф(...) 30 z 1 1 1 exp z2 dz, Ф(...) exp z2 2 2 2 2 - інтеграл імовірності та його похідна для 1 де нормального закону розподілу імовірностей; P , P - оцінки середньоквадратичних відхилень розрідження і швидкості його зміни як випадкових процесів, обчислювані на ковзному інтервалі часу T кст ; mP , mP - оцінки мінливого математичного очікування і його першої похідної, обчислювані на ковзному інтервалі часу Tm T кст . 35 Один з варіантів розрахунку оцінок характеристик випадкових процесів у модулі оцінки імовірнісних характеристик: m P 1 t Tm Pt dt Tm Tm , де mP - оцінка математичного очікування. m P 1 t Tm Pt dt T Tm , 40 де mP - оцінка похідної математичного очікування. 2 UA 99748 U 2 2 P 1 t T кст T кст Pt mP dt T , де P - оцінка середньоквадратичного відхилення. 2 2 P 1 t T кст T кст Pt mP dt T , 5 де P - оцінка похідної середньоквадратичного відхилення. Як приклад, розрахунок поточного значення імовірності відсутності порушення в модуль розрахунку допустимої частоти порушень регламенту визначається з виразу: , Ps ( Pгр , T ) exp ns ( Pгр , T ) exp Ns ( Pгр , T ) де T - інтервал часу; ns ( Pгр , T ) - середня частота (інтенсивність) порушень у обмежень Pгр на інтервалі часу 10 T; Ns ( Pгр , T ) - загальна кількість подій S на інтервалі часу T . 15 20 25 30 На кресленні наведено схему одного з варіантів системи керування розрідженням в топці котла для здійснення способу, що заявляється. Об'єктом управління є топка 2 котла 1 з системою видалення димових газів, продуктивність якої змінюється за рахунок зміни швидкості обертання димососа. Контур регулювання розрідження включає датчик розрідження 4 в топці 2 котла 1, датчик тиску повітря 5 в запальному пристрої 3 котла 1, регулятор частоти порушень гранично-припустимого значення розрідження 6 та регулятор розрідження 7, задавач величини розрідження 8 в топці 2 котла 1, блок порівняння корегуючого сигналу, сигналу зворотного зв'язку з датчика розрідження 4 та сигналу допустимого заданого значення розрідження 9, блок порівняння сигналу з модуля розрахунку допустимої частоти порушень регламенту і сигналу з модуля оцінки поточного значення частоти порушень 10, блок порівняння сигналу допустимого заданого значення розрідження і сигналу зворотного зв'язку від датчика тиску повітря 11, модуль розрахунку допустимої частоти порушень регламенту 12 (МРДЧП), модуль оцінки поточного значення частоти порушень 13 (МОЧП), модуль оцінки імовірнісних характеристик 14 (МОІХ), задавач імовірності відсутності порушень 15, задавач інтервалу часу 16, де виконується умова квазістаціонарності, задавач граничнодопустимого значення розрідження 17, частотний перетворювач 18 двигуна димососа 19. Спосіб здійснюється наступним чином. Розрідження P в топці 2 котла 1 вимірюється за допомогою датчика розрідження 4. Сигнал з датчика розрідження 4 та сигнал з задавача 16 інтервалу часу T кст , де виконується умова квазістаціонарності, надходять на вхід модуля 14, який призводить оцінки імовірнісних характеристик величини P . На основі сигналів оцінок імовірнісних характеристик та задавача 17 граничнодопустимого значення розрідження Pгр , модуль 13 формує сигнал поточної або 35 д гр розрахункової інтенсивності порушень регламенту ns ( P , t ) Модуль розрахунку допустимої д частоти порушень регламенту 12 формує сигнал припустимої інтенсивності порушень n s за сигналами задавача імовірності відсутності порушень 15 та задавача інтервалу часу Ткст 16, де д виконується умова квазістаціонарності. Блок порівняння 10 формує сигнал n s , як різницю д сигналу припустимої інтенсивності порушень n s та сигналу поточної або розрахункової 40 д гр інтенсивності порушень регламенту ns ( P , T ) . Цей сигнал надходить на вхід регулятора частоти порушень 6, який формує сигнал допустимого заданого значення розрідження Pздд . Тиск повітря P в запальному пристрої 3 вимірюється за допомогою датчика тиску повітря 5. Сигнал допустимого заданого значення розрідження Pздд від регулятора частоти порушень гранично-припустимого значення розрідження 6 та сигнал тиску повітря P з датчика тиску 45 повітря 5 надходять на вхід блока порівняння 9, який формує корегуючий сигнал Pк . Сигнал з задавача величини розрідження 8 надходить в блок порівняння 9, куди також надходять сигнал 3 UA 99748 U 5 величини розрідження P та корегуючий сигнал Pк з блока порівняння 11. За цими сигналами, блок порівняння 9 формує сигнал розузгодження U , який надходить на вхід регулятора розрідження 7, що формує керуючу дію U . Керуюча дія U надходить на частотний перетворювач 18, що змінює швидкість обертання двигуна димососа 19. Зміна частоти обертання двигуна димососа 19 змінює кількість відсмоктаних димових газів, що виділяються при спалюванні палива в котлі 1, що приводить до відповідної зміни величини розрідження P в топці 2 котла 1. Імітаційне моделювання запропонованого способу підтвердило доцільність його використання та працездатність системи управління. 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 30 35 1. Спосіб автоматичного керування розрідженням в топці, що включає вимірювання величини розрідження в топці котла, вимірювання величини тиску повітря в запальному пристрої котла, порівняння величини розрідження із заданим значенням і стабілізацію розрідження на заданому значенні зміною витрат продуктів згоряння, що видаляються, порівняння величини розрідження з її граничнодопустимим значенням і, при виникненні аварійної ситуації, коли величина розрідження стає менше граничнодопустимого значення, вмикання аварійного захисту, який відрізняється тим, що в мінливих умовах роботи топки додатково коригують задане значення розрідження, встановлюючи його, для поточних мінливих умов роботи котла, мінімально допустимим і одночасно таким, щоб при мінливих характеристиках коливань розрідження щодо такого заданого значення, аварійна ситуація не виникала. 2. Спосіб за п. 1, який відрізняється тим, що коригування заданого значення розрідження ведуть на основі імовірнісного підходу, встановлюючи його таким, щоб при мінливих характеристиках коливань розрідження щодо мінімально допустимого заданого значення аварійна ситуація не виникала із заданою вірогідністю для заданого інтервалу часу, для чого додатково задають інтервал часу, значно менший, ніж час роботи топки, задають для цього інтервалу часу бажане значення вірогідності відсутності на ньому аварійної ситуації, за прийнятою математичною моделлю перераховують його в допустиме значення частоти виникнення аварійних ситуацій, по виміряних значеннях розрідження в топці розраховують, на ковзному заданому інтервалі часу, оцінки імовірнісних характеристик коливань розрідження (зокрема математичних очікувань і середньоквадратичних відхилень розрідження і швидкості його зміни), за прийнятою математичною моделлю і за значеннями розрахованих оцінок розраховують оцінку поточного значення частоти виникнення аварійних ситуацій, порівнюють її з допустимим значенням цієї частоти і, змінюючи задане значення розрідження, стабілізують оцінку поточної частоти виникнення аварійних ситуацій на її допустимому значенні. 3. Спосіб за п. 2, який відрізняється тим, що розрахунок допустимого значення частоти виникнення аварійної ситуації ведуть з математичної моделі: д ns 40 1 ln Pзд( Pгр , T ) , s T де: Pзд(Pгр, T) - задане значення вірогідності відсутності аварійної ситуації на інтервалі часу s T , коли величина розрідження P знижується нижче його граничнодопустимого значення Pгр ; 45 нижні індекси S і S - позначають події, пов'язані відповідно з виникненням аварійної ситуації і з її відсутністю; розрахунок оцінки поточного значення частоти виникнення аварійних ситуацій ведуть з математичної моделі: гр n ( P P , T) 2 P 2 гр 1 P mP t exp signP 2 P mP t mP t mP t exp 2 Ф , P P t P t де: Ф(...) 1 2 z 1 2 1 exp 2 z dz, Ф(...) 2 exp 2 z 1 2 нормального закону розподілу імовірностей; 4 - інтеграл імовірності та його похідна для UA 99748 U P - оцінки середньоквадратичних відхилень розрідження і швидкості його зміни як випадкових процесів, обчислювані на ковзному інтервалі часу T кст ; P , m P , mP - оцінки мінливого математичного очікування і його першої похідної, обчислювані на ковзному інтервалі часу Tm T кст. Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюKhobin Viktor Andriiovych, Trubnikov Valerii Anatoliiovych
Автори російськоюХобин Виктор Андреевич, Трубников Валерий Анатолиевич
МПК / Мітки
МПК: F22B 35/02
Мітки: топці, котла, керування, автоматичного, спосіб, розрідженням
Код посилання
<a href="https://ua.patents.su/7-99748-sposib-avtomatichnogo-keruvannya-rozridzhennyam-v-topci-kotla.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного керування розрідженням в топці котла</a>
Спосіб спалювання водовугільної суспензії в топці котла

Номер патенту: 67421
Опубліковано: 27.02.2012
Автори: Ілющенко Володимир Іванович, Корсун Анастасія Олександрівна, Ілющенко Ігор Володимирович
МПК: F23C 10/02
Мітки: топці, спосіб, суспензії, водовугільної, спалювання, котла
Формула / Реферат:
Спосіб спалювання водовугільної суспензії в топці котла, що включає змішування вугільного пилу і води, подання суміші під тиском на нагрівання до теплообмінника, транспортування нагрітої суміші до форсунки і її спалювання в топці котла, який відрізняється тим, що вугільний пил і воду змішують з додаванням вапна в наступному співвідношенні, мас. %: вугільний пил 65-75, вапно 1-3, вода - решта, подання суміші на нагрівання ведуть під тиском...
Спосіб спалювання суміші газів у топці парового котла
Номер патенту: 54501
Опубліковано: 10.11.2010
Автори: Курбатов Юрій Леонідович, Агеєва Юлія Ігорівна
Мітки: суміші, топці, спосіб, газів, парового, котла, спалювання
Формула / Реферат:
Спосіб спалювання суміші газів у топці парового котла, що включає подавання в топку парового котла двома потоками низькокалорійних газів і, з протилежних сторін топки, двома потоками висококалорійних газів і подавання повітря в топку парового котла, який відрізняється тим, що висококалорійні гази подають нижніми потоками, які направляють вгору під кутом 30-35° до поперечної осі топки, а низькокалорійні гази подають з протилежних сторін топки...
Спосіб спалювання пиловугільного палива в топці парового котла з рідким шлаковидалянням
Номер патенту: 27900
Опубліковано: 26.11.2007
Автори: Курбатов Юрій Леонідович, Новікова Олена Вікторівна, Дрозд Євген Геннадійович
МПК: F23C 1/00
Мітки: шлаковидалянням, пиловугільного, рідким, топці, парового, палива, котла, спосіб, спалювання
Формула / Реферат:
Спосіб спалювання пиловугільного палива в топці парового котла з рідким шлаковидалянням, що включає подачу пиловугільного палива й повітря в кожну напівтопку зустрічними потоками рівного діаметра з розподілом їх на нижньому й верхньому ярусах, який відрізняється тим, що пиловугільне паливо й повітря подають трьома потоками, при цьому розподіл на верхньому ярусі ведуть двома потоками, на нижньому - одним потоком, орієнтованим між потоками...
Спосіб створення випромінюючого поду в топці газового котла
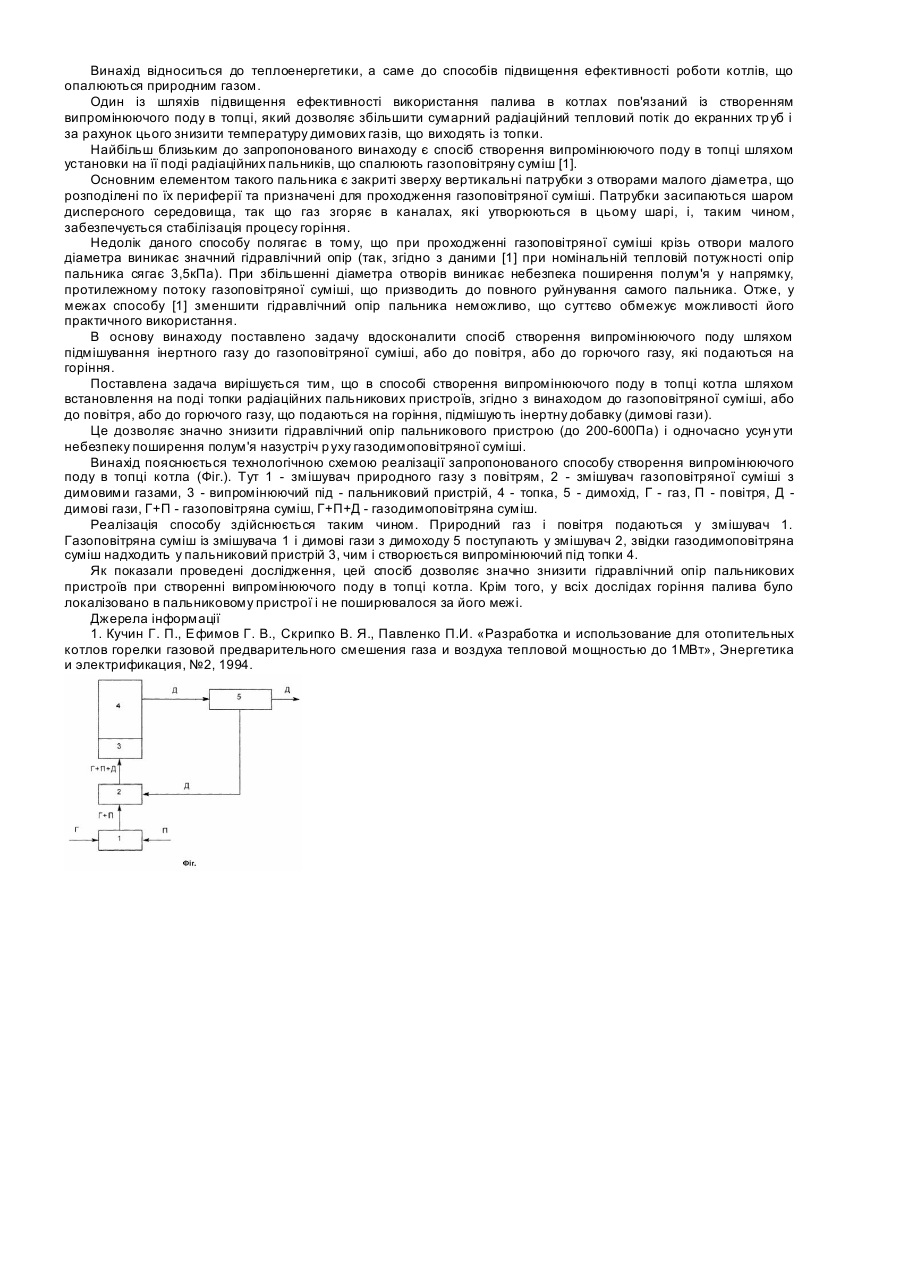
Номер патенту: 69649
Опубліковано: 15.09.2004
Автори: Власюк Анатолій Васильович, Скрипко Валерій Якович, Кучин Геннадій Петрович, Носач Вільям Григорович, Родіонов Володимир Іванович, Скляренко Євген Валентинович, Шрайбер Олександр Авраамович, Житар Іван Миколайович
МПК: F23C 5/00, F23D 14/12
Мітки: поду, котла, газового, створення, спосіб, топці, випромінюючого
Формула / Реферат:
1. Спосіб створення випромінюючого поду в топці газового котла шляхом встановлення на поді топки радіаційних пальникових пристроїв, що спалюють газоповітряну суміш, який відрізняється тим, що до газоповітряної суміші підмішують димові гази.2. Спосіб по п. 1, який відрізняється тим, що димові гази підмішують до повітря, що подається на горіння.3. Спосіб по п. 1, який відрізняється тим, що димові гази підмішують до горючого...
Спосіб автоматичного управління котельної установки
Номер патенту: 72566
Опубліковано: 27.08.2012
Автори: Трубніков Валерій Анатолійович, Хобін Віктор Андрійович
МПК: F22B 35/00
Мітки: управління, автоматичного, установки, котельної, спосіб
Формула / Реферат:
Спосіб автоматичного управління котельної установки, що включає вимірювання тиску пари та його регулювання, шляхом зміни витрати палива в пальниках котла, вимірювання тиску повітря у топці котла та регулювання співвідношення паливо-повітря шляхом зміни швидкості обертання двигуна вентилятора, вимірювання рівня води в барабані котла та його регулювання шляхом зміни швидкості обертання двигуна насоса, вимірювання розрідження у витяжці та його...
Попередній патент: Апарат для контактування газу та рідини
Наступний патент: Об’ємний координатний комутатор з оптичним перемикачем
Випадковий патент: Канал вимірювання похилої дальності до літальних апаратів з бспм для лівс полігонного випробувального комплексу