Молот безшаботний гідравлічний вертикальний

Формула / Реферат
Безшаботний молот, що містить гідравлічний бак зв'язку баб, верхню бабу, яка спирається на верхні амортизатори, що встановлені на перехідні плити, які спираються на бокові плунжери, на яких закріплені поршні гідравлічних приводних циліндрів, що встановлені на верхній поверхні баку гідравлічного зв'язку баб, та нижню бабу, яка спирається на нижній амортизатор, що встановлений на перехідну плиту, яка спирається на центральний плунжер, який відрізняється тим, що співвісно до вертикальної осі молота встановлено гідравлічний приводний циліндр, який прикріплений до нижньої поверхні гідравлічного баку зв'язку баб та в якому розміщений поршень, прикріплений до штоку, який виконано як одне ціле з центральним плунжером, при цьому кільцева площа центрального плунжера, площі перерізу бокових плунжерів і маси баб знаходяться у співвідношенні:
![]() ,
,
де ![]() - площа перерізу кожного із двох бокових плунжерів;
- площа перерізу кожного із двох бокових плунжерів;
![]() - кільцева площа центрального плунжера;
- кільцева площа центрального плунжера;
![]() ,
, ![]() - маси верхньої і нижньої баб;
- маси верхньої і нижньої баб;
а кільцеві площі поршнів, що закріплені на бокових плунжерах, площа поршня і площа перерізу штока нижнього приводного циліндра підпорядковані співвідношенню:
![]() ,
,
де ![]() - площа поршня нижнього приводного циліндра;
- площа поршня нижнього приводного циліндра;
![]() - кільцева площа поршня, закріпленого на боковому плунжері;
- кільцева площа поршня, закріпленого на боковому плунжері;
![]() - площа перерізу штока нижнього приводного циліндра;
- площа перерізу штока нижнього приводного циліндра;
![]() - робочий тиск і тиск зливу рідини привода молота в дію.
- робочий тиск і тиск зливу рідини привода молота в дію.
Текст
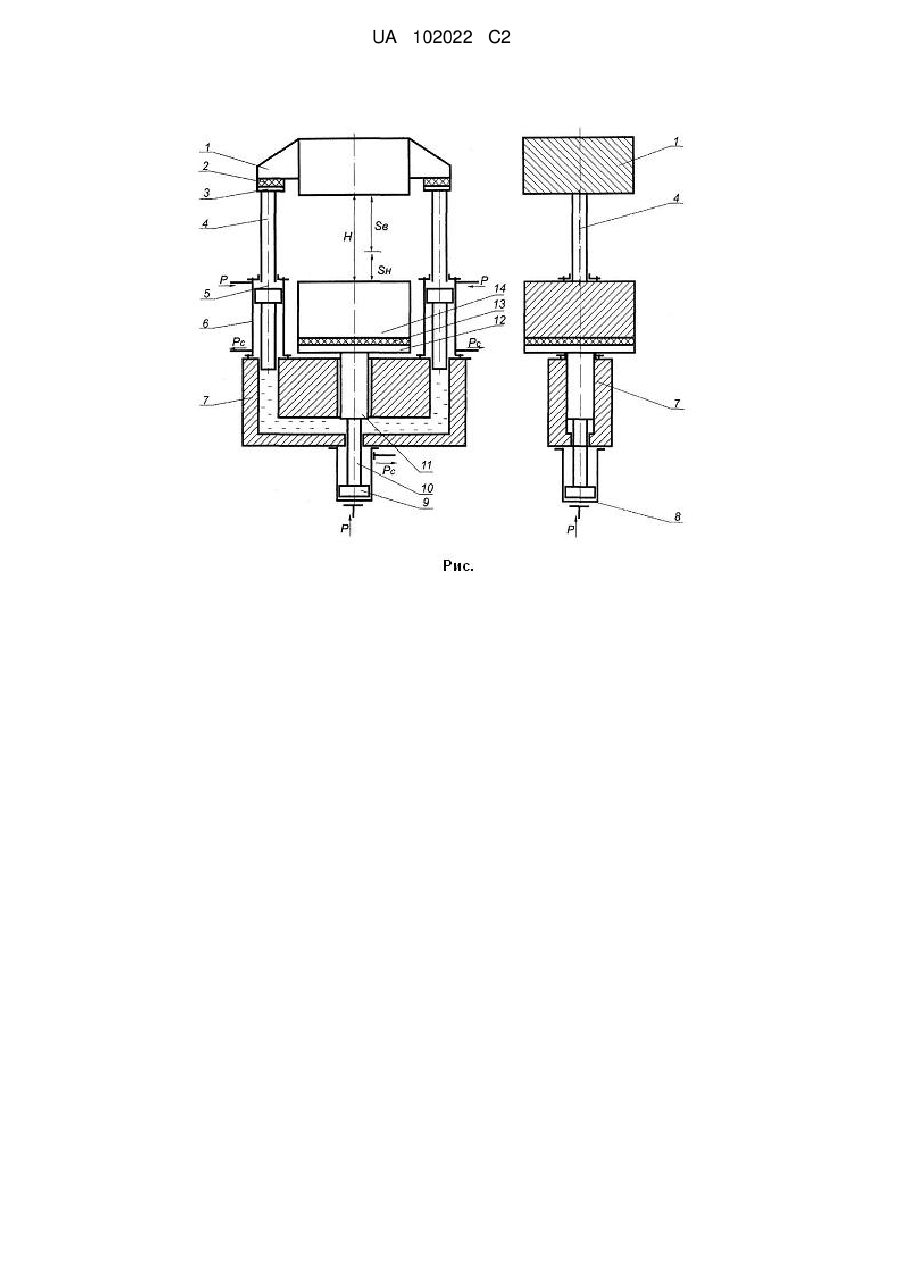
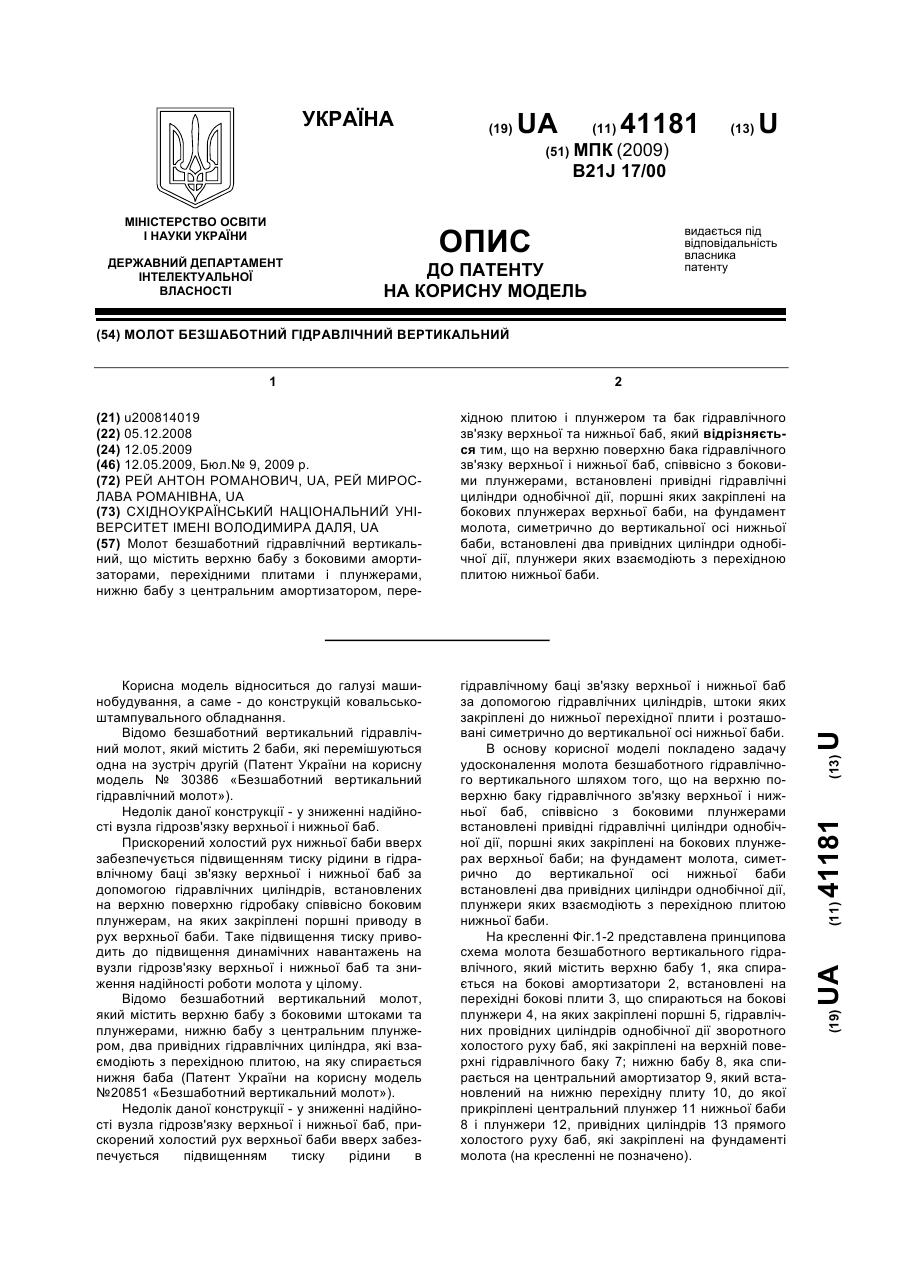
Реферат: Винахід належить до ковальсько-штампувального обладнання. Безшаботний молот містить гідравлічний бак зв'язку баб, верхню бабу, яка спирається на верхні амортизатори, що встановлені на перехідні плити, які спираються на бокові плунжери, на яких закріплені поршні гідравлічних приводних циліндрів, що встановлені на верхній поверхні бака гідравлічного зв'язку баб, та нижню бабу, яка спирається на нижній амортизатор, що встановлений на перехідну плиту, яка спирається на центральний плунжер. Співвісно до вертикальної осі молота встановлено гідравлічний приводний циліндр, який прикріплений до нижньої поверхні гідравлічного бака зв'язку баб та в якому розміщений поршень, прикріплений до штоку, який виконано як одне ціле з центральним плунжером. Відношення суми площ перерізів бокових плунжерів і кільцевої площі центрального плунжера дорівнює відношенню мас верхньої і нижньої баб, а співвідношення площі поршня нижнього приводного циліндра і суми кільцевих площ двох поршнів, які закріплені на бокових плунжерах, є таким, що забезпечує однакову кількість руху при прямому холостому ході баб, відсутність гармонійної складової в функціях швидкості баб і зупинку баб в кінці навантажувальної фази удару. Винахід дозволяє підвищити технічні показники, надійність і довговічність вузла гідрозв'язку верхньої і нижньої баб. UA 102022 C2 (12) UA 102022 C2 UA 102022 C2 5 10 15 20 25 30 35 40 45 50 Винахід належить до галузі машинобудування, а саме до конструкції ковальськоштампувального устаткування. Відомо безшаботний вертикальний молот, який містить верхню бабу з бічними штоками і плунжерами, нижню бабу з центральним штоком і плунжером, гідробак з розташованими в ньому бічними плунжерами і центральним плунжером, який виконаний як одне ціле з штоком приводного циліндра таким чином, що діаметр плунжера більше діаметра штока приводного циліндра [1]. Недолік відомого молота полягає в тому, що, по-перше, приводний циліндр розташований під гідравлічним баком зв'язку баб, що приводить до підвищення загальної висоти молота не менше ніж на величину ходу нижньої баби. По-друге, молот приводиться в дію прикладанням зусилля до однієї баби, друга баба приводиться в рух через вузол гідравлічного зв'язку баб. Аналіз рівнянь швидкостей баб, виконаний в роботі [2], для даної схеми приводу молота в дію, показує, що на швидкості баб, які збільшуються пропорційно часу, накладаються гармонійні складові, що знаходяться в протифазі. Якщо при ударі більше швидкість верхньої баби, центр тяжіння баб переміщатиметься вниз, що приведе до підвищення тиску рідини в гідравлічному баку зв'язку баб, якщо більше швидкість нижньої баби, вірогідне розкриття стиків у вузлі гідравлічного зв'язку баб. Вказаний недолік стримує підвищення технічних показників безшаботного молота і знижує його надійність. Відомо безшаботний вертикальний гідравлічний молот [3] (найближчий аналог), який містить верхню бабу з бічними амортизаторами, перехідними плитами і плунжерами, і бак гідравлічного зв'язку верхньої і нижньої баб, співвісно з бічними плунжерами встановлені приводні гідравлічні циліндри, поршні яких закріплені на плунжерах верхньої баби. Недолік відомої конструкції - в зниженні надійності і довговічності вузла гідрозв'язку баб. Зниження надійності випливає з того, що розгін нижньої баби на удар здійснюється шляхом підвищення тиску рідини в гідробаку боковими плунжерами, на які діє верхня баба, що приводиться в рух привідними циліндрами. Окрім цього, як показує аналіз рівнянь швидкостей баб, виконаний в роботі [2], у молотів, які приводяться в дію силою, що прикладається до однієї баби, на швидкості баб, які збільшуються пропорційно часу дії сили, накладаються гармонійні складові, що знаходяться в протифазах. Якщо при ударі більшу швидкість має верхня баба, центр тяжіння баб переміщатиметься вниз, що приведе до подальшого збільшення тиску рідини в гідравлічному баку зв'язку баб; якщо більшу швидкість має нижня баба, центр тяжіння баб переміщатиметься вгору, що приведе до вірогідного розкриття стиків у вузлі гідравлічного зв'язку баб. В основу даного технічного рішення поставлено задачу удосконалення вертикального безшаботного гідравлічного вертикального молота шляхом того, що співвісно до вертикальної осі молоту встановлено приводний гідравлічний циліндр, який прикріплено до нижньої поверхні гідравлічного баку зв'язку баб, в привідному циліндрі розташовано поршень, прикріплений до штоку, який виконано як одне ціле з центральним плунжером, причому відношення сум площ перетинів бокових плунжерів і кільцевої площі центрального плунжера дорівнює відношенню мас верхньої і нижньої баб; а співвідношення площі поршня приводного циліндра і сум кільцевих площ двох поршнів, які закріплені на бокових плунжерах, виконано таким, яке забезпечує однакову кількість руху при прямому холостому ході баб, відсутність гармонійної складової в функціях швидкості баб і зупинку баб в кінці навантажувальної фази удару. На рисунку представлена принципова схема молота безшаботного вертикального гідравлічного, який містить верхню бабу 1, яка спирається на бокові амортизатори 2, встановлені на перехідні плити 3, що спираються на бокові плунжери 4, на яких закріплені привідні поршні 5 верхньої баби 1, що розташовані в бокових циліндрах 6, встановлених на верхній поверхні гідравлічного баку 7 зв'язку баб. Співвісно вертикальної осі молоту до нижньої поверхні гідравлічного баку 7 закріплено гідравлічний циліндр 8, в якому розміщено поршень 9, шток 10 якого виконано як одне ціле з нижнім плунжером 11, на який послідовно спираються нижня перехідна плита 12, нижній амортизатор 13 і нижня баба 14. В статичному положенні баби нерухомі. За допомогою плунжерів баби в гідравлічному баку 7 створюють однаковий тиск, площі перерізів бокових плунжерів 4 і кільцева площа нижнього плунжера 11 визначаються по залежностях: gm в gm н fн 2Pв , Pв , (1) де fв , fн - площі перерізів бокових плунжерів 4 і кільцева площа нижнього плунжера 11; g - прискорення вільного падіння; fв 55 1 UA 102022 C2 mв , mн - маси верхньої і нижньої баб; Pв - тиск рідини в гідравлічному баку вузла зв'язку баб. Із (1) знаходимо співвідношення: 2fв m в m , fн 2fв н . (2) fн mн mв 5 10 Для забезпечення надійної роботи молота в кінці навантажувальної фази удару баби повинні зупинитись, швидкість кожної баби повинна дорівнюватись нулю, таку умову можливо забезпечити, якщо в момент зіткнення баби будуть мати однакову кількість руху, тобто: mв v в mн v н , (3) де v в , v н - швидкості верхньої і нижньої баб. Однакову кількість руху баби будуть мати при умові, що до кожної баби будуть прикладені однакові імпульси сил, тобто: Nt mв v в , Nt mн v н , (4) де N , t - діюча сила і термін її дії. Із (4) випливають такі співвідношення: 15 Vн Vв mв m m , н в в , S н S в в , (5) mн mн mн н , в - прискорення нижньої і верхньої баб; S н , S в - переміщення нижньої і верхньої баб. де 20 Сила приводу створюються подачею рідини в приводні циліндри і визначається такою залежністю: N 2(P Pс )Fвв (P Pс )Fn Pс fn , (6) де P - тиск робочої рідини (мінеральне масло або водяна емульсія); - тиск зливу; Pc 25 Fвв - кільцева площа бокового поршня 5; Fn - повна площа нижнього поршня 9; fн - площа поперечного перерізу штока 10. З рівняння (6) знаходимо співвідношення: Fn 2Fвв Pc fn . (7) P Pc Задавшись прискоренням верхньої баби, а воно не може бути більшим прискорення вільного падіння, тобто gв g , находимо кільцеву площу поршня 5: 30 35 40 Fвв (mв в 0,08mв g) / 2(P Pc ) , (8) де 0,08m в g - сили тертя по рекомендації [4]. Кільцева площа поршня 9 визначається як: Fnк Fn fn . (9) Молот безшаботний гідравлічний вертикальний працює наступним чином: у вихідному положенні, яке показано на кресленні, баба 1 займає крайнє верхнє положення, нижня баба 14 крайнє нижнє. Прямий холостий рух, який закінчується ударом, забезпечується подачею робочої рідини (мінеральне масло або водяна емульсія) в верхню порожнину циліндра 6 і в нижню порожнину циліндра 8. Задавшись прискоренням верхньої баби, находимо час прямого холостого руху баб: t н 2Sв / в , (10) і швидкість верхньої баби в момент удару: Vв 2 в / Sв , (11) з урахуванням співвідношень (5) находимо енергію удару: 2 UA 102022 C2 L 5 2 mв v в 2 mв . (12) 1 m н Після нанесення удару починається зворотний рух баб, який розподіляється на два етапи, на першому етапі баби рухаються з прискоренням, на другому - з гальмуванням. Рівняння руху баб на етапі прискорення має вигляд: P(2Fвн Fнк ) Pс (Fn 2Fвн ) mв вn mн нn 0,16 g(mв mн ) , (13) де 0,16 g(mв mн ) - сили тертя в направляючих баб і ущільненнях плунжерів і поршнів. З урахуванням співвідношень (5) на основі (13) визначається прискорення руху верхньої баби при холостому зворотному русі: вn [P(2Fвн Fнк ) Pс (Fn 2Fвв ) 0,16 g(mв mн )] /(2mв ) . (14) 10 Величиною прискореного руху верхньої баби Sm визначається час прискореного руху: t вn 2Sвn / вn , (15) і швидкість верхньої баби в кінці зворотного прискореного руху: Vвn 2 вn / Sвn . (16) 15 20 25 30 35 40 45 Для зупинки баб в вихідних положеннях після прискореного руху баб починається процес гальмування. Нижні порожнини циліндрів 6 і 8 з'єднуються зі зливною магістраллю, верхні - з магістраллю високого тиску. Рівняння руху баб при гальмуванні буде мати вигляд: P(Fвв Fn ) 0,16 g(mв mн ) в mв нmн Pс (Fвн Fнк ) , (17) з урахуванням співвідношень (5) прискорення руху верхньої баби на етапі гальмування визначається як: вn [P(2Fвв Fнк ) 0,16 g(mв mн )g Pс (Fвн Fn )] /(2mв ) , (18) час руху баб на етапі гальмування: t вm Vвn / вn , (19) за час гальмування верхня баба пройде відстань: Sвm Vвn t вm / 2 . (20) Час прискореного руху і час гальмування визначають час зворотного холостого ходу баб: t в t вn t вm . (21) Сума переміщень верхньої баби при заданій величині ходу на етапі прискореного руху у (S вn ) і розрахованій по (20) величині ходу при гальмуванні у (S вm ) повинні дорівнювати повному ходу верхньої баби: (Sв (Sвn (Sвm ) , (22) якщо рівність (22) не виконується, то при більшій правій частині (22) необхідно зменшити відрізок прискореного руху верхньої баби (S вn ) і повторити рішення, починаючи з рівняння (15) і при меншій правій частині - необхідно збільшити відрізок прискореного руху (S вn ) і рішення повторити. Час подвійного ходу баб визначається сумою часу прямого і часу зворотного ходів: t x t n t в , (23) кількість подвійних ходів за хвилину: n 60 / t x [ ход. / хв] . (24) Приклад конкретного виконання Вихідні дані: - сума мас верхньої баби, верхніх амортизаторів, перехідних плит, бокових плунжерів і 4 поршнів, mв= 4·10 кг; - сума мас нижньої баби, нижнього амортизатора, перехідної плити, нижнього плунжера, 5 штока і поршня, mн=5·10 кг; - сумарний (повний) хід баб, Н=1,8 м; - повний монтажний хід верхньої баби, Sв=1,0 м; - повний монтажний хід нижньої баби, SH=0,8 м; - тиск робочої рідини, Р=32 МПа; - тиск зливу, Рс=0,6 МПа; 3 UA 102022 C2 5 - тиск рідини в гідравлічному баку зв'язку баб, Рв=16МПа. Площі перерізів бокових fв і кільцева площа нижнього плунжера f н визначаються по залежності (1): 4 6 2 2 2 fв=(9,8-4-10 )/(2·16·10 )=1,23·10- м (123 см ); 4 6 2 2 2 fн=(0,8·5·10 )/16·10 =3,06·10- м (306 см ). Повна площа перерізу нижнього плунжера дорівнює сумі кільцевої площі fн і площі перерізу штока fn , тобто: fнn fн fn , (25) 10 площа штока визначається на основі сили, яка діє на нього вздовж вертикальної осі при приводі в рух нижньої баби на удар: Pg km н n , (26) , k - коефіцієнт запасу, k 12 ; g - прискорення вільного падіння; n - прискорення нижньої баби, з урахуванням (5) н , вmв / mн , де 15 і так, як верхня баба не може рухатись при прямому холостому ході з прискоренням більшим за прискорення вільного падіння, в g прийнявши в g , одержимо: m 4 10 4 н ' g в , н' g 0,8g , mн 5 10 4 20 25 30 і після підстановки в (26) маємо: 4 Pg=1,2·4·10 ·0,8g=3,8·10,5H. Для запобігання втрати стійкості штока діюча сила не повинна перевищувати критичну, яка визначається по залежності: 2 Jмін , (24) Pкр (vl)2 де - модуль пружності сталі, 2,1 10 11 Па ; Jмін - мінімальний момент інерції площі перетину стержня, для круглого стержня 4; Jмін d 32 v - коефіцієнт приведення довжини стержня, який залежить від способу закріплення кінців стержня, для даного випадку v 1; , l - довжина стержня (штока), l 15м . 5 Для діаметра штока dn=8 см величина критичної сили становить Ркр=4,6-10 , величина 5 діючої сили Pд=3,8·10 H, умова Ркр≥Рд, виконується. Площа перерізу штоку буде дорівнювати: 4 2 2 2 S n dn / 4 ; Sn=3.14·0.08/4=50·10- м (50 см ). 35 Площа перетину нижнього плунжера 11 дорівнює сумі площі перетину штока 10 і кільцевої площі плунжера 11, тобто: 4 4 4 2 2 Fнn=fн+fn, Fнn=306·10- +50·10- =356·10- м (356 см ), діаметр нижнього плунжера 11 визначиться як: dнn 4F / ), dнn 4 356 104 / 21.3 102 м2 (213см2 ) . , 40 Кільцева площа поршня 5 визначається по залежності (8), прискорення верхньої баби при прямому холостому ході прийнято рівним прискоренню вільного падіння в g : 4 4 66 4 2 2 Fвв=(4·10 ·9,8+0,08·4·10 ·9,8)/{2(32·10 0,6·10 }=67·10 м (67 см ), Діаметр поршня 5 визначиться як: Dвв 4(Fвв fв ) / , Dвв 4 (67 104 1.23 104 ) / 3,14 15,6 102 м(15,6 см) . 45 Площа нижнього приводного поршня 9 визначається по залежності (7): 4 6 4 6 4 2 2 Fn=2·67·10 -(0,6·10 ·50·10 )/{(32-0,6) 10 }=133·10 м (133 см ), діаметр поршня 9 визначиться як: 4 UA 102022 C2 Dn 4Fn / , Dn 4 133 104 / 3.14 0.13м(13см) . 5 Кільцева площа поршня 9 визначиться як різниця повної площі Fn і площі штока 44 4 2 2 Fnк=Fn-fn·Fnк=133·10 50·10 =83·10 м (83 см ). Час прямого холостого руху верхньої баби (баби рухаються синхронно, час руху нижньої баби буде таким же) визначимо по (10), верхня баба рухається під дією сили тяжіння, її прискорення не може бути більшим прискорення вільного падіння в g : fн 2 1.0 / 9.8 0.45 с. Швидкість верхньої баби в момент удару (11): v в 2 9.8 / 1.0 4.43м / с. 10 Енергія удару визначається по (12): 4 104 4,432 L 2 4 104 . 1 5 104 706кдж Після нанесення удару баби рухаються в вихідне положення, прискорення зворотного руху визначиться по залежності (14): вn 32 106 (2 67 104 83 104 ) 0,6 106 (133 104 2 67 104 ) 0,16 9,8 9 104 8,28 м / с. 15 Задавшись відрізком транспортного руху верхньої баби, швидкість в кінці відрізка прискорення: Sвn 0,56 м , визначимо і вn 2 вn Sвn , вn 2 8,28 0,56 3,05 м / с . 20 Час прискореного руху баби визначиться як: t вn вn / вn , t вn 3,05 / 8,28 0,37 c . Після прискореного руху баб на зворотному холостому русі починається гальмування, прискорення руху при гальмуванні визначиться по залежності (18): вм {32 106 (2 67 104 133 10 4 ) 016( 4 10 4 5 104 ) 9,8 0,6 106 (2 67 10 4 83 10 4 )} /(2 2 10 4 ) 10,7 м / с 25 . Час гальмування визначається як: t вm вn / вm , t вm 3,05 / 10,7 0,285 c . Відстань, яку пройде верхня баба при гальмуванні визначиться як: 2 S вm t вn / 2 , S вm 0,285 2 10,7 / 2 0,43 м . Повне переміщення верхньої баби при зворотному холостому русі являється сумою переміщень прискореного руху і гальмування: S в S вn S вm , S в 0,56 0,43 0,99 м . 30 Повний монтажний хід верхньої баби, згідно з вихідними даними складає S в 10 м , , розрахунковий хід дорівнює S в 0,99 м , таке співвідношення можна признати задовільним. Якщо розрахунковий рух виявиться більшим за повний рух, необхідно зменшити відрізок прискореного руху S вn і розрахунок повторити, починаючи з визначення швидкості верхньої 35 40 45 баби в кінці прискореного руху - v вn по залежності (16), якщо розрахунковий рух менше монтажного, відрізок прискореного руху необхідно збільшити, рішення повторити. Час зворотного холостого руху баб буде складатись із часу прискореного руху і часу гальмування (16): tв=0,370+0,285=0,655 с, час подвійного ходу баб (23): tx=0,450+0,655=1,11 с, кількість подвійних ходів баб за хвилину (24): n=60/1,11=54 [ход./хв]. В результаті розрахунку параметрів руху молота, у якого верхня баба має масу m в=40m; нижня - mн=50m; одержимо енергію удару L=706Кдж, що відповідає енергії удару шаботного молота з масою падаючих частин 39m. Безшаботний молот з масою баб 45m, виготовлений по 5 UA 102022 C2 5 10 15 традиційній схеми мав би енергію удару, яка відповідає шаботному молоту з масою падаючих частин 22,5m. Як позитивне слід відзначити відсутність гармонійної складової в функції швидкості кожної баби, що підвищить надійність роботи молота. Джерела інформації: 1. Патент № 19623 Україна, МПК B21J 7/00. Безшаботний вертикальний молот /Монятовський С.С., Рей Р.І., Гутько Ю.І. № u 200607886; Заявлено 15.12.06; Опубл. 15.12.06, Бюл. № 12. 2. Рей А.Р. Влияние жесткости узла гидросвязи на некоторые параметры бесшаботного молота /А.Р. Рей, Р.И. Рей// Ресурсозберігаючі технології виробництва та обробки тиском матеріалів у машинобудуванні: Зб. наук. пр. - Луганськ: Вид-во СНУ їм. В. Даля, 2009. - С. 177182. 3. Патент № 30386 Україна, МПК B21J 7/00. Безшаботний вертикальний гідравлічний молот / Рей А.Р. № u 2007 11834; Заявлено 29.10.07. Опубл.25.02.08. Бюл. № 4. 4. Рей Р.И. Трение в уплотнениях и направляющих падающих частей кузнечных молотов / Р.И. Рей, В.И. Сумской, Т.С. Сушкова // Ресурсозберігаючі технології виробництва та обробки тиском матеріалів у машинобудуванні: 36. наук. пр. - Луганськ: Вид-во СНУ їм. В.Даля, 2005. - С. 107-111. ФОРМУЛА ВИНАХОДУ 20 25 30 Безшаботний молот, що містить гідравлічний бак зв'язку баб, верхню бабу, яка спирається на верхні амортизатори, що встановлені на перехідні плити, які спираються на бокові плунжери, на яких закріплені поршні гідравлічних приводних циліндрів, що встановлені на верхній поверхні бака гідравлічного зв'язку баб, та нижню бабу, яка спирається на нижній амортизатор, що встановлений на перехідну плиту, яка спирається на центральний плунжер, який відрізняється тим, що співвісно до вертикальної осі молота встановлено гідравлічний приводний циліндр, який прикріплений до нижньої поверхні гідравлічного бака зв'язку баб та в якому розміщений поршень, прикріплений до штоку, який виконано як одне ціле з центральним плунжером, при цьому кільцева площа центрального плунжера, площі перерізу бокових плунжерів і маси баб знаходяться у співвідношенні: 2fв / fн mв / mн , де fв - площа перерізу кожного із двох бокових плунжерів; fн - кільцева площа центрального плунжера; m в , m н - маси верхньої і нижньої баб; 35 а кільцеві площі поршнів, що закріплені на бокових плунжерах, площа поршня і площа перерізу штока нижнього приводного циліндра підпорядковані співвідношенню: Fn 2Fвв fnPc /(P Pc ) , де Fn - площа поршня нижнього приводного циліндра; 40 Fвв - кільцева площа поршня, закріпленого на боковому плунжері; fn - площа перерізу штока нижнього приводного циліндра; P,Pc - робочий тиск і тиск зливу рідини привода молота в дію. 6 UA 102022 C2 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Назва патенту англійськоюNo-anvil hydraulic vertical hammer
Автори англійськоюRei Anton Romanovych, Rei Roman Ivanovych
Назва патенту російськоюМолот бесшаботный гидравлический вертикальный
Автори російськоюРей Антон Романович, Рей Роман Иванович
МПК / Мітки
МПК: B21J 7/28
Мітки: безшаботний, вертикальний, молот, гідравлічний
Код посилання
<a href="https://ua.patents.su/9-102022-molot-bezshabotnijj-gidravlichnijj-vertikalnijj.html" target="_blank" rel="follow" title="База патентів України">Молот безшаботний гідравлічний вертикальний</a>
Молот безшаботний гідравлічний вертикальний
Номер патенту: 41181
Опубліковано: 12.05.2009
Автори: Рей Антон Романович, Рей Мирослава Романівна
МПК: B21J 17/00
Мітки: безшаботний, вертикальний, молот, гідравлічний
Формула / Реферат:
Молот безшаботний гідравлічний вертикальний, що містить верхню бабу з боковими амортизаторами, перехідними плитами і плунжерами, нижню бабу з центральним амортизатором, перехідною плитою і плунжером та бак гідравлічного зв'язку верхньої та нижньої баб, який відрізняється тим, що на верхню поверхню бака гідравлічного зв'язку верхньої і нижньої баб, співвісно з боковими плунжерами, встановлені привідні гідравлічні циліндри однобічної дії,...
Безшаботний вертикальний гідравлічний молот
Номер патенту: 35920
Опубліковано: 10.10.2008
Автори: Рей Антон Романович, Рей Роман Іванович
МПК: B21J 7/00
Мітки: вертикальний, гідравлічний, молот, безшаботний
Формула / Реферат:
Безшаботний вертикальний гідравлічний молот, що містить верхню бабу з боковими амортизаторами, перехідними плитами і плунжерами, нижню бабу з центральним амортизатором, перехідною плитою і плунжером, гідравлічний бак зв'язку верхньої та нижньої баби, який відрізняється тим, що нижня частина центрального плунжера, яка має площу перерізу, меншу за верхню частину, проходить через отвір в нижній частині гідравлічного бака і розміщується в...
Безшаботний вертикальний гідравлічний молот
Номер патенту: 30386
Опубліковано: 25.02.2008
Автор: Рей Антон Романович
МПК: B21J 7/00
Мітки: безшаботний, молот, вертикальний, гідравлічний
Формула / Реферат:
Безшаботний вертикальний гідравлічний молот, що містить верхню бабу з боковими амортизаторами, перехідними плитами і плунжерами, нижню бабу з центральним амортизатором, перехідною плитою і плунжером та бак гідравлічного зв'язку верхньої і нижньої баб, який відрізняється тим, що на верхню поверхню бака гідравлічного зв'язку верхньої і нижньої баб, співвісно з боковими плунжерами, встановлені привідні гідравлічні циліндри, поршні яких...
Безшаботний вертикальний гідравлічний молот
Номер патенту: 35919
Опубліковано: 10.10.2008
Автори: Рей Мирослава Романівна, Рей Антон Романович
МПК: B21J 7/00
Мітки: безшаботний, вертикальний, гідравлічний, молот
Формула / Реферат:
Безшаботний вертикальний гідравлічний молот, що містить верхню бабу з боковими амортизаторами, перехідними плитами і плунжерами, нижню бабу з центральним амортизатором, перехідною плитою і плунжером, гідравлічний бак зв'язку верхньої та нижньої баби, який відрізняється тим, що всі три плунжери виготовлені у вигляді ступінчатих циліндрів, нижні частини яких мають площі перерізів, менші за площі перерізів верхніх частин, гідравлічний бак в...
Безшаботний вертикальний молот
Номер патенту: 20851
Опубліковано: 15.02.2007
Автори: Монятовський Станислав Степанович, Гутько Юрій Іванович, Рей Роман Іванович
МПК: B21J 7/00
Мітки: молот, вертикальний, безшаботний
Формула / Реферат:
Безшаботний вертикальний молот, що містить верхню бабу з боковими штоками та плунжерами, нижню бабу з центральним штоком та плунжером, гідробак з встановленими у ньому боковими і центральним плунжерами, який відрізняється тим, що у ньому застосовано два привідних гідравлічних циліндри, розташованих симетрично до осі нижньої баби, які взаємодіють з перехідною плитою, на яку спирається нижня баба, причому прискорення нижньої баби при прямому...
Попередній патент: Пристрій і спосіб підвищення місткості для бездротового зв’язку
Наступний патент: Пристрій для підвищення ефективності цементування свердловин з комбінованими робочими елементами
Випадковий патент: Спосіб підвищення якості та запліднювальної здатності сперміїв бугаїв