Спосіб діагностики витоків в трубопровідній мережі електрогідравлічного комплексу
Номер патенту: 103707
Опубліковано: 25.12.2015
Автори: Коренькова Тетяна Валеріївна, Манько Роман Миколайович, Ковальчук Вікторія Григорівна
Формула / Реферат
Спосіб діагностики витоків в трубопровідній мережі електрогідравлічного комплексу, що включає зчитування й аналіз сигналу тиску Ηp(t) в контрольній точці вимірювання на виході насосного агрегату для визначення наявності витоку і місця її локалізації, який відрізняється тим, що додатково зчитують сигнали витрати Qp(t) в контрольній точці вимірювання на виході насосного агрегату і в кінцевій точці трубопровідної мережі у споживача Qcon(t), визначають похідні витрат ![]() та
та ![]() в кожен дискретний інтервал часу; якщо виконують умову
в кожен дискретний інтервал часу; якщо виконують умову ![]() та
та ![]() , що показує на наявність витоку в трубопровідній мережі, обчислюють сигнал гідравлічної потужності в контрольній точці вимірювання на виході насосного агрегату:
, що показує на наявність витоку в трубопровідній мережі, обчислюють сигнал гідравлічної потужності в контрольній точці вимірювання на виході насосного агрегату:
Php(t) = rgHp(t)Qp(t),
де ρ - щільність рідини, що перекачують;
g - 9,81 м/с2 - прискорення вільного падіння;
з використанням методу частотного аналізу на базі рядів Фур'є сигнал гідравлічної потужності розкладають на постійну і змінні складові:
![]() ,
,
де  - постійна складова потужності;
- постійна складова потужності;
![]() - амплітудне значення k-ї гармоніки змінної складової гідравлічної потужності;
- амплітудне значення k-ї гармоніки змінної складової гідравлічної потужності;
 - косинусна складова гідравлічної потужності;
- косинусна складова гідравлічної потужності;
 - синусна складова гідравлічної потужності;
- синусна складова гідравлічної потужності;
![]() - фазовий зсув сигналу гідравлічної потужності;
- фазовий зсув сигналу гідравлічної потужності;
Тре = t2 - t1 - період розкладання сигналу гідравлічної потужності;
t1 - момент часу, в який відбувається зміна похідної![]() ;
;
t2 - момент часу, відповідний сталому значенню сигналу Qp(t) на виході насосного агрегату;
Ω = 2πf - кругова частота зміни сигналу гідравлічної потужності;
f = 1/Трe - частота зміни сигналу;
K, k - кількість і номер гармонік гідравлічної потужності;
визначають коефіцієнт ![]() підсилення змінної складової гідравлічної потужності; за відсутності витоку коефіцієнт
підсилення змінної складової гідравлічної потужності; за відсутності витоку коефіцієнт ![]() ; появі витоку в трубопровідній мережі відповідає зростання значення коефіцієнта
; появі витоку в трубопровідній мережі відповідає зростання значення коефіцієнта ![]() , причому, чим більше його значення, тим ближче до контрольної точки вимірювання знаходиться місце витоку чи тим більша величина витоку; знаючи поточне значення коефіцієнта
, причому, чим більше його значення, тим ближче до контрольної точки вимірювання знаходиться місце витоку чи тим більша величина витоку; знаючи поточне значення коефіцієнта ![]() , розраховують відстань від контрольної точки вимірювання до місця витоку:
, розраховують відстань від контрольної точки вимірювання до місця витоку:
![]() ,
,
де Qleak(t) = Qp(t) - Qcon(t) - величина витоку;
a, b, c, d - коефіцієнти апроксимації, що враховують властивості рідини, конфігурацію трубопроводу та параметри гідротранспортування.
Текст
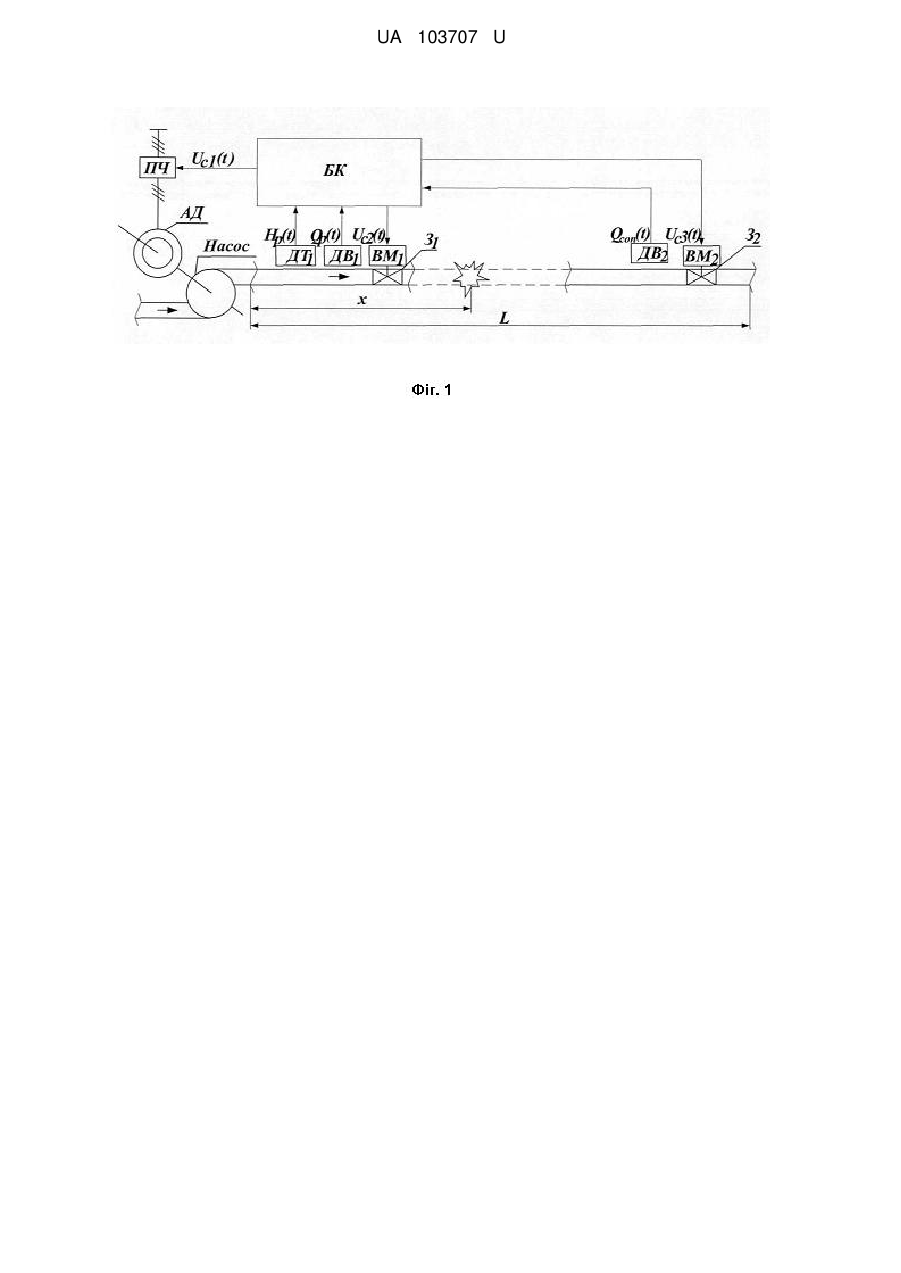
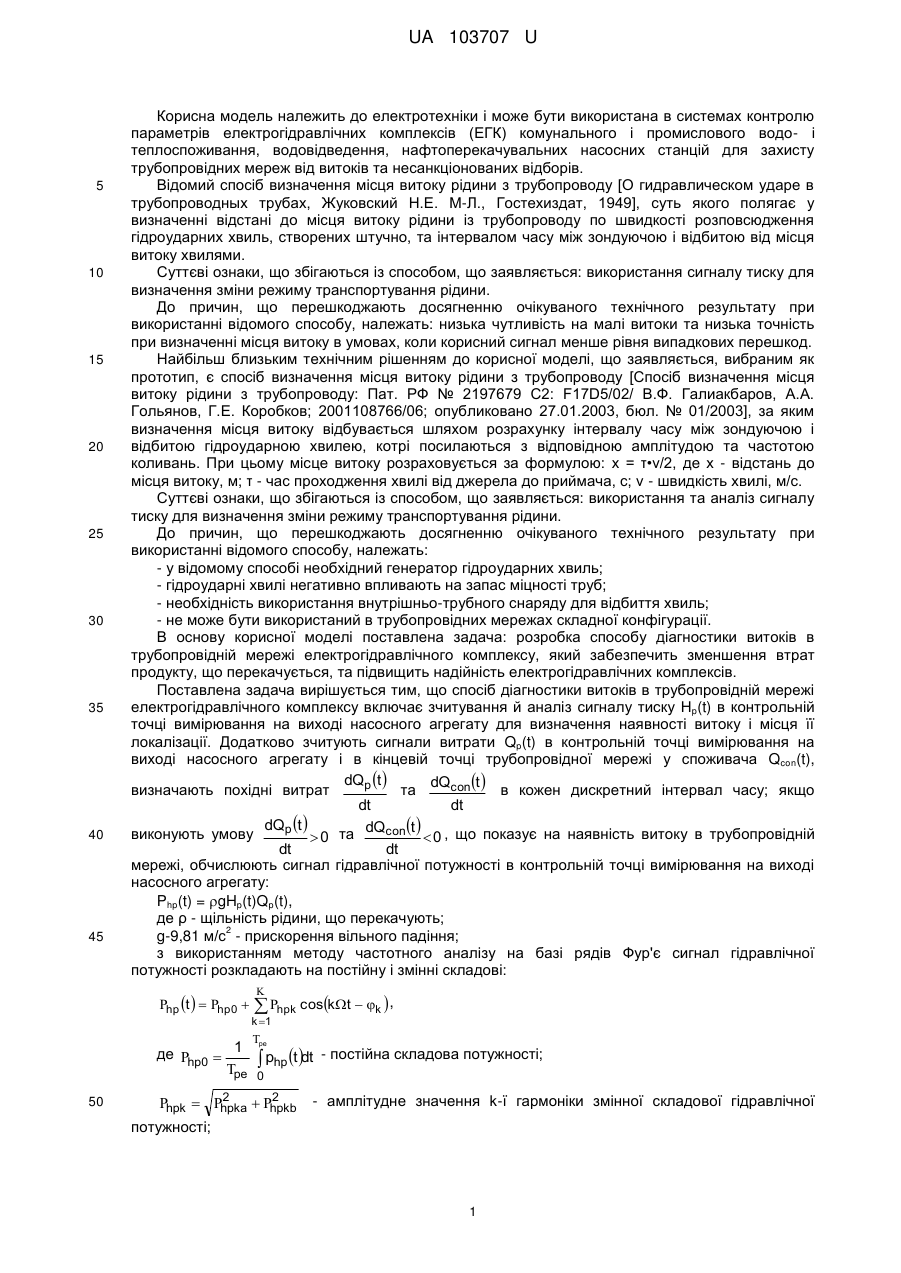
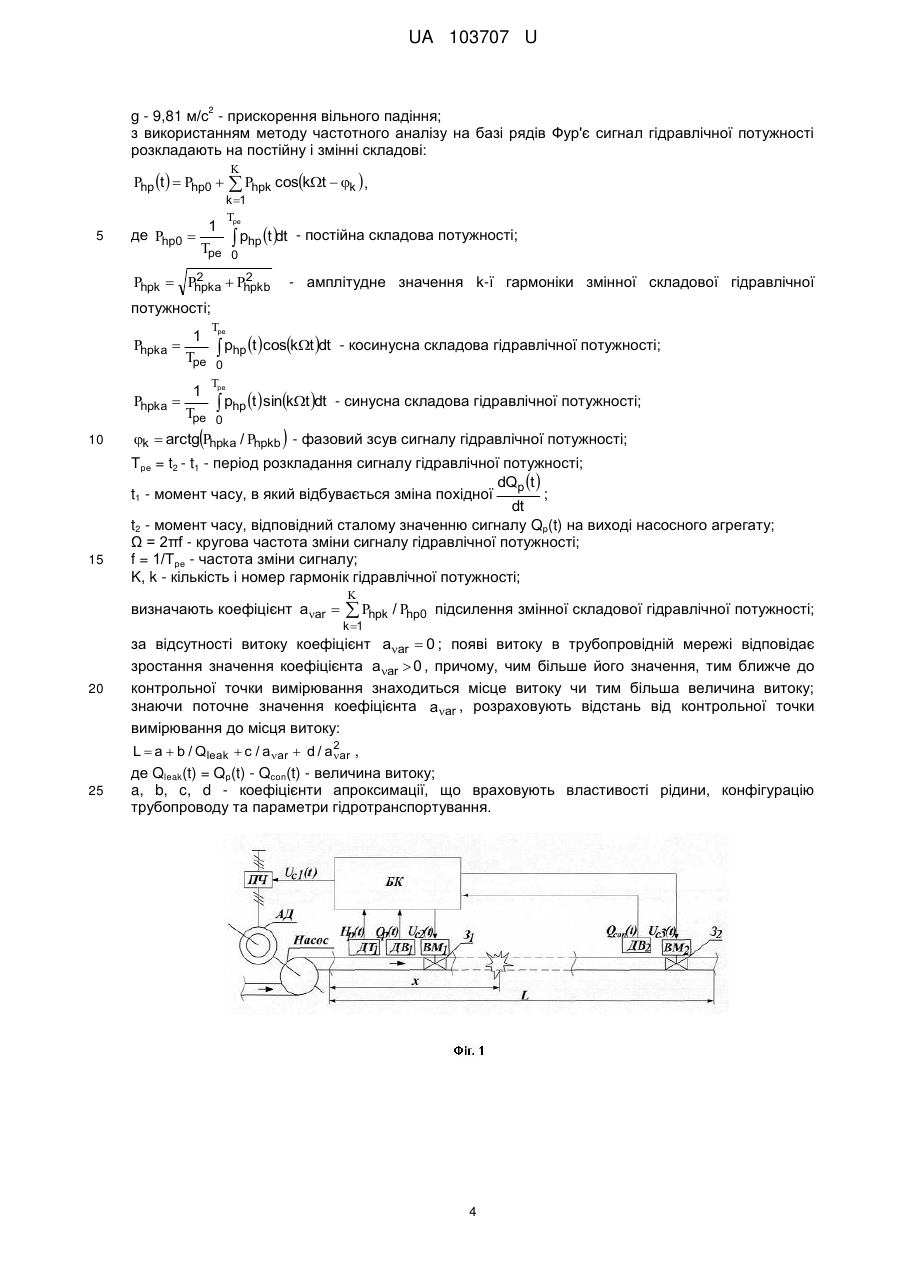
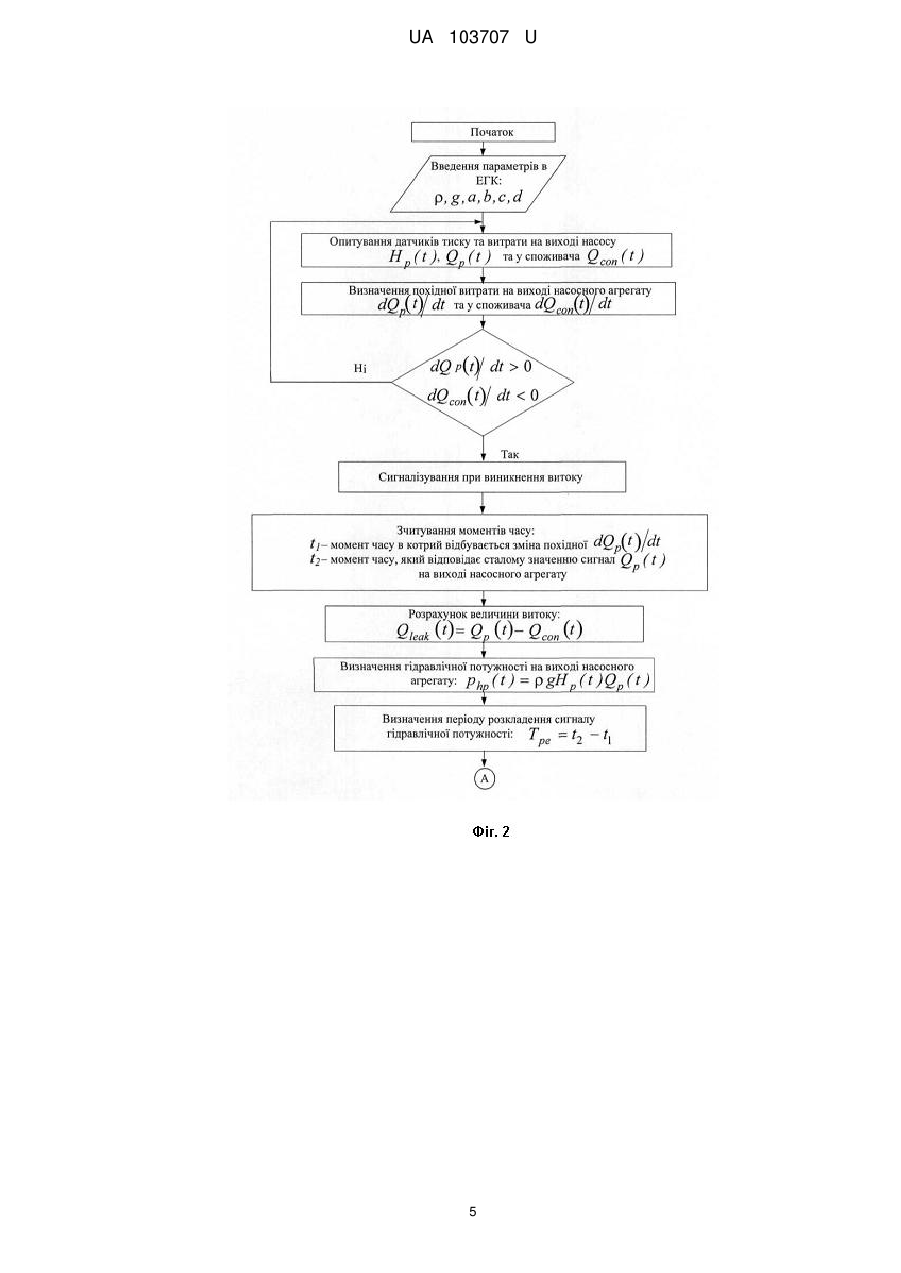
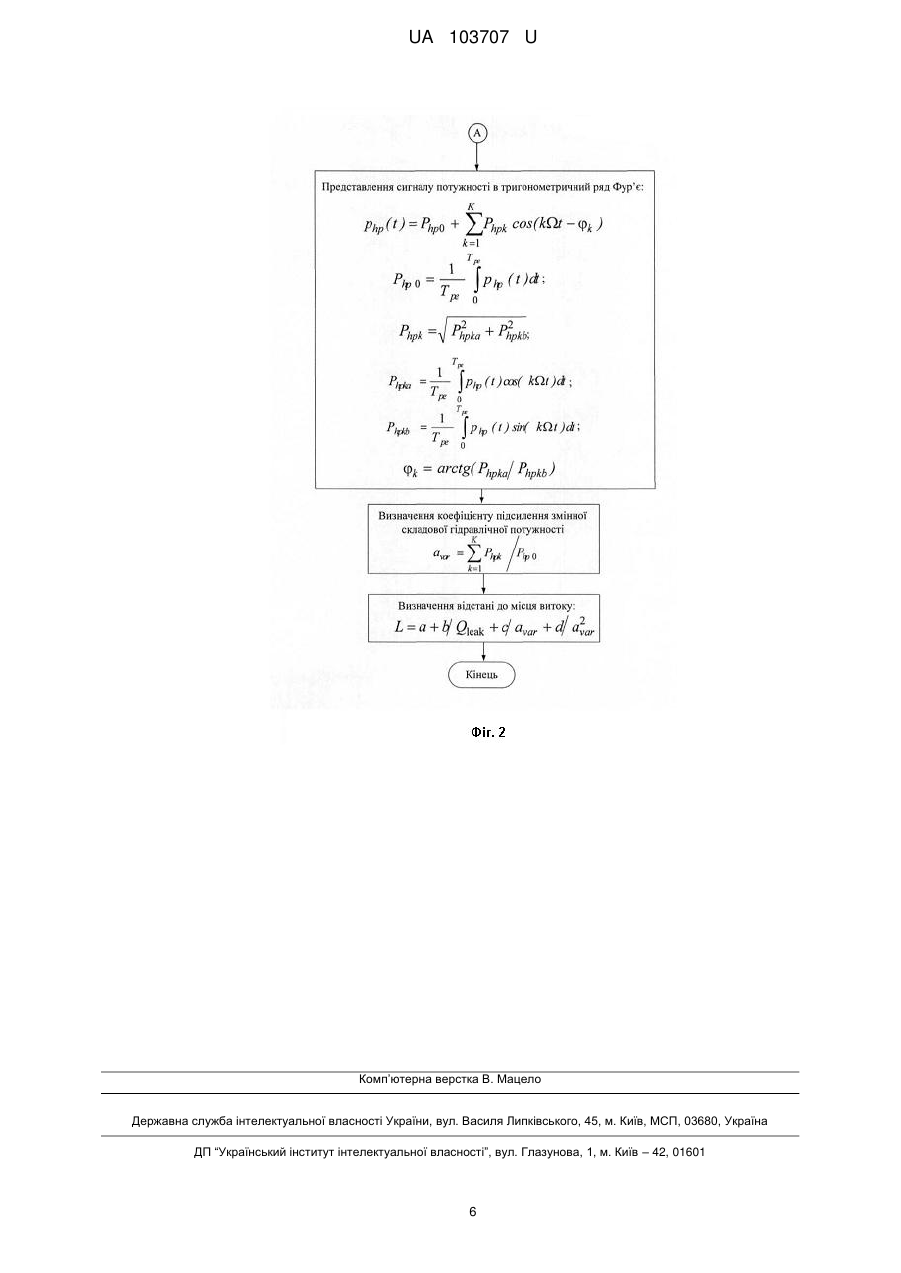
Реферат: Спосіб діагностики витоків в трубопровідній мережі електрогідравлічного комплексу включає зчитування й аналіз сигналу тиску Ηp(t) в контрольній точці вимірювання на виході насосного агрегату для визначення наявності витоку і місця її локалізації. Додатково зчитують сигнали витрати Qp(t) в контрольній точці вимірювання на виході насосного агрегату і в кінцевій точці dQp t dQcont трубопровідної мережі у споживача Qcon(t), визначають похідні витрат та в dt dt dQp t dQcont кожен дискретний інтервал часу; якщо виконується умова 0 , що показує 0 та dt dt на наявність витоку в трубопровідній мережі, обчислюють сигнал гідравлічної потужності в контрольній точці вимірювання на виході насосного агрегату: Php(t) = gHp(t)Qp(t), де ρ - щільність рідини, що перекачують; 2 g - 9,81 м/с - прискорення вільного падіння; з використанням методу частотного аналізу на базі рядів Фур'є сигнал гідравлічної потужності розкладають на постійну і змінні складові. UA 103707 U (12) UA 103707 U UA 103707 U 5 10 15 20 25 30 35 40 45 Корисна модель належить до електротехніки і може бути використана в системах контролю параметрів електрогідравлічних комплексів (ЕГК) комунального і промислового водо- і теплоспоживання, водовідведення, нафтоперекачувальних насосних станцій для захисту трубопровідних мереж від витоків та несанкціонованих відборів. Відомий спосіб визначення місця витоку рідини з трубопроводу [О гидравлическом ударе в трубопроводных трубах, Жуковский Н.Е. М-Л., Гостехиздат, 1949], суть якого полягає у визначенні відстані до місця витоку рідини із трубопроводу по швидкості розповсюдження гідроударних хвиль, створених штучно, та інтервалом часу між зондуючою і відбитою від місця витоку хвилями. Суттєві ознаки, що збігаються із способом, що заявляється: використання сигналу тиску для визначення зміни режиму транспортування рідини. До причин, що перешкоджають досягненню очікуваного технічного результату при використанні відомого способу, належать: низька чутливість на малі витоки та низька точність при визначенні місця витоку в умовах, коли корисний сигнал менше рівня випадкових перешкод. Найбільш близьким технічним рішенням до корисної моделі, що заявляється, вибраним як прототип, є спосіб визначення місця витоку рідини з трубопроводу [Спосіб визначення місця витоку рідини з трубопроводу: Пат. РФ № 2197679 С2: F17D5/02/ В.Ф. Галиакбаров, А.А. Гольянов, Г.Е. Коробков; 2001108766/06; опубликовано 27.01.2003, бюл. № 01/2003], за яким визначення місця витоку відбувається шляхом розрахунку інтервалу часу між зондуючою і відбитою гідроударною хвилею, котрі посилаються з відповідною амплітудою та частотою коливань. При цьому місце витоку розраховується за формулою: x = τ•ν/2, де x - відстань до місця витоку, м; τ - час проходження хвилі від джерела до приймача, с; ν - швидкість хвилі, м/с. Суттєві ознаки, що збігаються із способом, що заявляється: використання та аналіз сигналу тиску для визначення зміни режиму транспортування рідини. До причин, що перешкоджають досягненню очікуваного технічного результату при використанні відомого способу, належать: - у відомому способі необхідний генератор гідроударних хвиль; - гідроударні хвилі негативно впливають на запас міцності труб; - необхідність використання внутрішньо-трубного снаряду для відбиття хвиль; - не може бути використаний в трубопровідних мережах складної конфігурації. В основу корисної моделі поставлена задача: розробка способу діагностики витоків в трубопровідній мережі електрогідравлічного комплексу, який забезпечить зменшення втрат продукту, що перекачується, та підвищить надійність електрогідравлічних комплексів. Поставлена задача вирішується тим, що спосіб діагностики витоків в трубопровідній мережі електрогідравлічного комплексу включає зчитування й аналіз сигналу тиску Ηp(t) в контрольній точці вимірювання на виході насосного агрегату для визначення наявності витоку і місця її локалізації. Додатково зчитують сигнали витрати Qp(t) в контрольній точці вимірювання на виході насосного агрегату і в кінцевій точці трубопровідної мережі у споживача Qcon(t), dQp t dQcont в кожен дискретний інтервал часу; якщо визначають похідні витрат та dt dt dQp t dQcont , що показує на наявність витоку в трубопровідній виконують умову 0 0 та dt dt мережі, обчислюють сигнал гідравлічної потужності в контрольній точці вимірювання на виході насосного агрегату: Php(t) = gHp(t)Qp(t), де ρ - щільність рідини, що перекачують; 2 g-9,81 м/с - прискорення вільного падіння; з використанням методу частотного аналізу на базі рядів Фур'є сигнал гідравлічної потужності розкладають на постійну і змінні складові: hp t hp0 hpk coskt k , k 1 pe де hp0 1 php t dt - постійна складова потужності; pe 0 50 2 2 hpk hpka hpkb - амплітудне значення k-ї гармоніки змінної складової гідравлічної потужності; 1 UA 103707 U hpka 1 pe php t coskt dt - косинусна складова гідравлічної потужності; pe 0 1 pe php t sinkt dt - синусна складова гідравлічної потужності; pe 0 k arctg hpka / hpkb - фазовий зсув сигналу гідравлічної потужності; Тре = t2 – t1 - період розкладання сигналу гідравлічної потужності; dQp t t1 - момент часу, в який відбувається зміна похідної ; dt t2 - момент часу, відповідний сталому значенню сигналу Qp(t) на виході насосного агрегату; Ω = 2πf - кругова частота зміни сигналу гідравлічної потужності; f=1/Трe - частота зміни сигналу; K, k - кількість і номер гармонік гідравлічної потужності. hpka 5 10 15 20 25 30 35 40 45 Визначають коефіцієнт aar hpk / hp0 підсилення змінної складової гідравлічної k 1 потужності; за відсутності витоку коефіцієнт aar 0 ; появі витоку в трубопровідній мережі відповідає зростання значення коефіцієнта aar 0 , причому, чим більше його значення, тим ближче до контрольної точки вимірювання знаходиться місце витоку чи тим більша величина витоку; знаючи поточне значення коефіцієнта aar , розраховують відстань від контрольної точки вимірювання до місця витоку: L a b / Qleak c / aar d / a2ar , де Qleak(t) = Qp(t) - Qcon(t) - величина витоку; a, b, c, d - коефіцієнти апроксимації, що враховують властивості рідини, конфігурацію трубопроводу та параметри гідротранспортування. Технічний результат полягає у тому, що не потребує додаткової контрольно-вимірювальної апаратури, характеризується досить високою достовірністю визначення місця витоку, що підвищує ефективність і надійність електрогідравлічних комплексів за рахунок зменшення втрат транспортованої рідини. Суть корисної моделі пояснюють креслення. На фіг. 1 наведена система діагностики витоків, на якій прийняті наступні позначення: ПЧ перетворювач частоти; АД - асинхронний двигун; БК - блок керування; ДТ1 - датчик тиску в контрольній точці вимірювання; ДВ1, ДВ2 - датчики витрати в контрольній точці вимірювання та у споживача, відповідно; ВМ1, ВМ2 - виконуючі механізми першої та другої засувки, відповідно; Ηp(t) - значення тиску в контрольній точці вимірювання на виході насосного агрегату; Qp(t) значення витрати в контрольній точці вимірювання на виході насосного агрегату; Qcon(t) значення витрати у споживача; З1, З2 - засувки на початку та в кінці трубопроводу; x - відстань від контрольної точки вимірювання до місця витоку; Uc1(t), Uc2(t), Uc3(t) - сигнали керування на перетворювач частоти та виконуючі механізми першої та другої засувки, відповідно. Робота системи діагностики витоків полягає у періодичному опитуванні датчиків тиску та витрати в контрольній точці вимірювання на виході насосного агрегату та датчика витрати у споживача. Після цього сигнали надходять в блок керування, в якому, відповідно до алгоритму (фіг. 2), визначається наявність та величина витоку, а також його координати. Для зменшення втрат при наявності витоку формуються відповідні керуючі впливи на перетворювач частоти для зміни обертів робочого колеса або на виконуючі механізми засувок. На фігурі 2 наведений алгоритм роботи способу діагностики витоків в трубопровідній мережі електрогідравлічного комплексу, на яких прийняті позначення: ρ - щільність рідини, що перекачується; g прискорення вільного падіння; a, b, c, d - коефіцієнти апроксимації; Ηp(t) - значення тиску на виході насосного агрегату; Qp(t) - значення витрати на виході насосного агрегату; dQp t Qcon(t) - значення витрати у споживача; - похідна витрати на виході насосного dt dQcont - похідна витрати у споживача; dt Php(t) - гідравлічна потужність на виході насосу; Php0 - постійна складова потужності; Рhрkа косинусна складова гідравлічної потужності; Phpkb - синусна складова гідравлічної потужності; Τpe агрегату; 2 UA 103707 U 5 10 15 - період розкладання сигналу гідравлічної потужності; Qleak(t) - величина витоку; аνar - коефіцієнт підсилення змінної складової гідравлічної потужності; Phpk - амплітудне значення k-ϊ гармоніки змінної складової гідравлічної потужності; Спосіб діагностики витоків в трубопровідній мережі електрогідравлічного комплексу реалізується наступним чином. Задаються параметри a, b, c, d, g, p ЕГК (фіг. 2). Зчитуються сигнали тиску Ηp(t) та витрати Qp(t) в контрольній точці на виході насосного агрегату і в кінцевій точці трубопровідної мережі у споживача Qcon(t). dQp t dQcont в кожен дискретний інтервал часу. Визначаються похідні витрат та dt dt dQp t dQcont Виконання умови 0 сигналізує про наявність витоку в трубопровідній 0 та dt dt мережі. dQp t Фіксуються моменти часу t1, в який відбувається зміна похідної , та t2, відповідний dt сталому значенню сигналу Qp(t) на виході насосного агрегату. Визначається величина витоку Qleak(t) = Qp(t) - Qcon(t). Обчислюється сигнал гідравлічної потужності php (t) = ρgHp(t)Qp(t) в контрольній точці вимірювання на виході насосного агрегату. Потім розраховується період Трe=t2 –t1 розкладання сигналу гідравлічної потужності. З використанням методу частотного аналізу на базі рядів Фур'є сигнал гідравлічної потужності описується постійною і змінними складовими: hp t hp0 hpk coskt k , k 1 pe де hp0 1 php t dt - постійна складова потужності; pe 0 20 2 2 hpk hpka hpkb - амплітудне значення k-ϊ гармоніки змінної складової гідравлічної потужності; hpka 1 pe php t coskt dt - косинусна складова гідравлічної потужності; pe 0 1 pe php t sinkt dt - синусна складова гідравлічної потужності; pe 0 k arctg hpka / hpkb - фазовий зсув сигналу гідравлічної потужності. hpka 25 Визначається коефіцієнт aar hpk / hp0 змінної складової гідравлічної потужності. За k 1 допомогою апроксимаційної залежності визначаються відстані L a b / Qleak c / aar d / a2ar до місця витоку. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 40 Спосіб діагностики витоків в трубопровідній мережі електрогідравлічного комплексу, що включає зчитування й аналіз сигналу тиску Ηp(t) в контрольній точці вимірювання на виході насосного агрегату для визначення наявності витоку і місця її локалізації, який відрізняється тим, що додатково зчитують сигнали витрати Qp(t) в контрольній точці вимірювання на виході насосного агрегату і в кінцевій точці трубопровідної мережі у споживача Qcon(t), визначають dQp t dQcont похідні витрат та в кожен дискретний інтервал часу; якщо виконують умову dt dt dQp t dQcon t 0 та 0 , що показує на наявність витоку в трубопровідній мережі, обчислюють dt dt сигнал гідравлічної потужності в контрольній точці вимірювання на виході насосного агрегату: Php(t) = gHp(t)Qp(t), де ρ - щільність рідини, що перекачують; 3 UA 103707 U 2 g - 9,81 м/с - прискорення вільного падіння; з використанням методу частотного аналізу на базі рядів Фур'є сигнал гідравлічної потужності розкладають на постійну і змінні складові: hp t hp0 5 де hp0 hpk coskt k , k 1 pe 1 php t dt - постійна складова потужності; pe 0 2 2 hpk hpka hpkb - амплітудне значення k-ї гармоніки змінної складової гідравлічної потужності; 1 pe hpka php t coskt dt - косинусна складова гідравлічної потужності; pe 0 1 pe php t sinkt dt - синусна складова гідравлічної потужності; pe 0 k arctg hpka / hpkb - фазовий зсув сигналу гідравлічної потужності; hpka 10 15 Тре = t2 - t1 - період розкладання сигналу гідравлічної потужності; dQp t t1 - момент часу, в який відбувається зміна похідної ; dt t2 - момент часу, відповідний сталому значенню сигналу Qp(t) на виході насосного агрегату; Ω = 2πf - кругова частота зміни сигналу гідравлічної потужності; f = 1/Трe - частота зміни сигналу; K, k - кількість і номер гармонік гідравлічної потужності; визначають коефіцієнт aar 20 25 hpk / hp0 підсилення змінної складової гідравлічної потужності; k 1 за відсутності витоку коефіцієнт aar 0 ; появі витоку в трубопровідній мережі відповідає зростання значення коефіцієнта aar 0 , причому, чим більше його значення, тим ближче до контрольної точки вимірювання знаходиться місце витоку чи тим більша величина витоку; знаючи поточне значення коефіцієнта aar , розраховують відстань від контрольної точки вимірювання до місця витоку: L a b / Qleak c / aar d / a2ar , де Qleak(t) = Qp(t) - Qcon(t) - величина витоку; a, b, c, d - коефіцієнти апроксимації, що враховують властивості рідини, конфігурацію трубопроводу та параметри гідротранспортування. 4 UA 103707 U 5 UA 103707 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: електрогідравлічного, витоків, діагностики, спосіб, мережі, трубопровідний, комплексу
Код посилання
<a href="https://ua.patents.su/8-103707-sposib-diagnostiki-vitokiv-v-truboprovidnijj-merezhi-elektrogidravlichnogo-kompleksu.html" target="_blank" rel="follow" title="База патентів України">Спосіб діагностики витоків в трубопровідній мережі електрогідравлічного комплексу</a>
Спосіб ідентифікації параметрів електрогідравлічного комплексу
Номер патенту: 87460
Опубліковано: 10.02.2014
Автори: Ковальчук Вікторія Григорівна, Коренькова Тетяна Валеріївна, Родькін Дмитро Йосипович, Зінченко Марина Григорівна
МПК: F04D 13/00, G01R 11/50
Мітки: комплексу, параметрів, електрогідравлічного, ідентифікації, спосіб
Формула / Реферат:
Спосіб ідентифікації параметрів електрогідравлічного комплексу, що включає визначення параметрів електрогідравлічного комплексу під час його експлуатації, який відрізняється тим, що на вхід системи керування перетворювачем частоти задають тестовий гармонічний вплив, який включає постійну U0 і змінну Uvar складові, де Ω=2πf - кутова частота; f - частота зміни...
Спосіб визначення наявності і кількості витоків в напірній мережі
Номер патенту: 31235
Опубліковано: 15.12.2000
Автори: Чорний Анатолій Петрович, Байбула Віктор Федорович, Петросов Валерій Альбертович
МПК: F17D 5/02
Мітки: мережі, наявності, спосіб, витоків, кількості, напірний, визначення
Формула / Реферат:
1. Спосіб визначення наявності і кількості витоків в напірній мережі, який полягає у визначенні різниці між подаваємою у мережу подачою і сумою витрат споживачами, і відрізняється тим що наявність і кількість витоків визначають графічно по зміщенню точки пересікання характеристики мережі з характеристикою насоса відносно первісного положення цієї точки, коли витоки в мережі відсутні.2. Спосіб по п.1, який відрізняється тим, що...
Спосіб визначення наявності і кількості витоків в напірній мережі і її стану

Номер патенту: 31787
Опубліковано: 15.12.2000
Автори: Магеря Афанасій Антонович, Колотило Віктор Дмитрович, Чорний Анатолій Петрович, Петросов Валерій Альбертович
МПК: F17D 5/02
Мітки: напірний, визначення, спосіб, витоків, наявності, стану, мережі, кількості
Текст:
...і підвищити достовірність визначення витоків і стану мережі через відсутність припущень, властивих прототипу, і цей спосіб може здійснюватись у будь-який час обслуговуючим персоналом. Крім цього, цей спосіб надає можливість діагностувати становище мережних трубопроводів, визначати найбільш пошкоджені з них і планувати їхній ремонт і заміну. На фігурах зображений графічний метод способу визначення витоків: фіг. 1 - графік залежності...
Спосіб діагностики зон витоків з водопровідних мереж
Номер патенту: 87782
Опубліковано: 25.02.2014
Автори: Добровольська Оксана Григорівна, Українець Микола Опанасович, Сокольник Володимир Іванович
МПК: F17D 5/02
Мітки: зон, витоків, діагностики, спосіб, водопровідних, мереж
Формула / Реферат:
Спосіб діагностики зон витоків з водопровідних мереж, що містить вимірювання перепаду тисків на окремих ділянках мережі, математичне перетворення отриманого перепаду тиску в об'ємну витрату та втрати тиску на ділянках, порівняння фактичних та граничних об'ємних витрат і втрат тиску одночасно для всіх ділянок мережі, який відрізняється тим, що перепад тиску вимірюють у контрольних вузлах мережі транспортування та визначають місця розташування...
Пристрій для захисту від витоків струму у комбінованій електричній мережі
Номер патенту: 71130
Опубліковано: 15.11.2004
Автор: Ведерніков Олександр Іванович
МПК: H02H 3/17
Мітки: комбінований, захисту, електричний, пристрій, струму, витоків, мережі
Формула / Реферат:
1. Пристрій для захисту від витоків струму в комбінованій електричній мережі, що містить приєднувальний фільтр, перші виводи обмоток якого приєднані до фаз мережі промислової частоти, другі об'єднані у спільну точку і через заземлюючий резистор заземлені, джерело вимірювального постійного струму і виконавчий блок, який відрізняється тим, що він оснащений симетричним магнітним підсилювачем, виконаним на сердечнику з прямокутною петлею...
Попередній патент: Спосіб дугового зварювання плавким електродом стикових з’єднань феромагнітних сталей
Наступний патент: Спосіб частотного керування асинхронним двигуном з несиметричними параметрами обмоток статора
Випадковий патент: Пневмоподавач (варіанти)