Кільцева вимірювальна антенна система
Номер патенту: 103714
Опубліковано: 11.11.2013
Автори: Михальчук Інна Іванівна, Щербина Ольга Алімівна, Сібрук Леонід Вікторович, Ільницький Людвіг Якович
Формула / Реферат
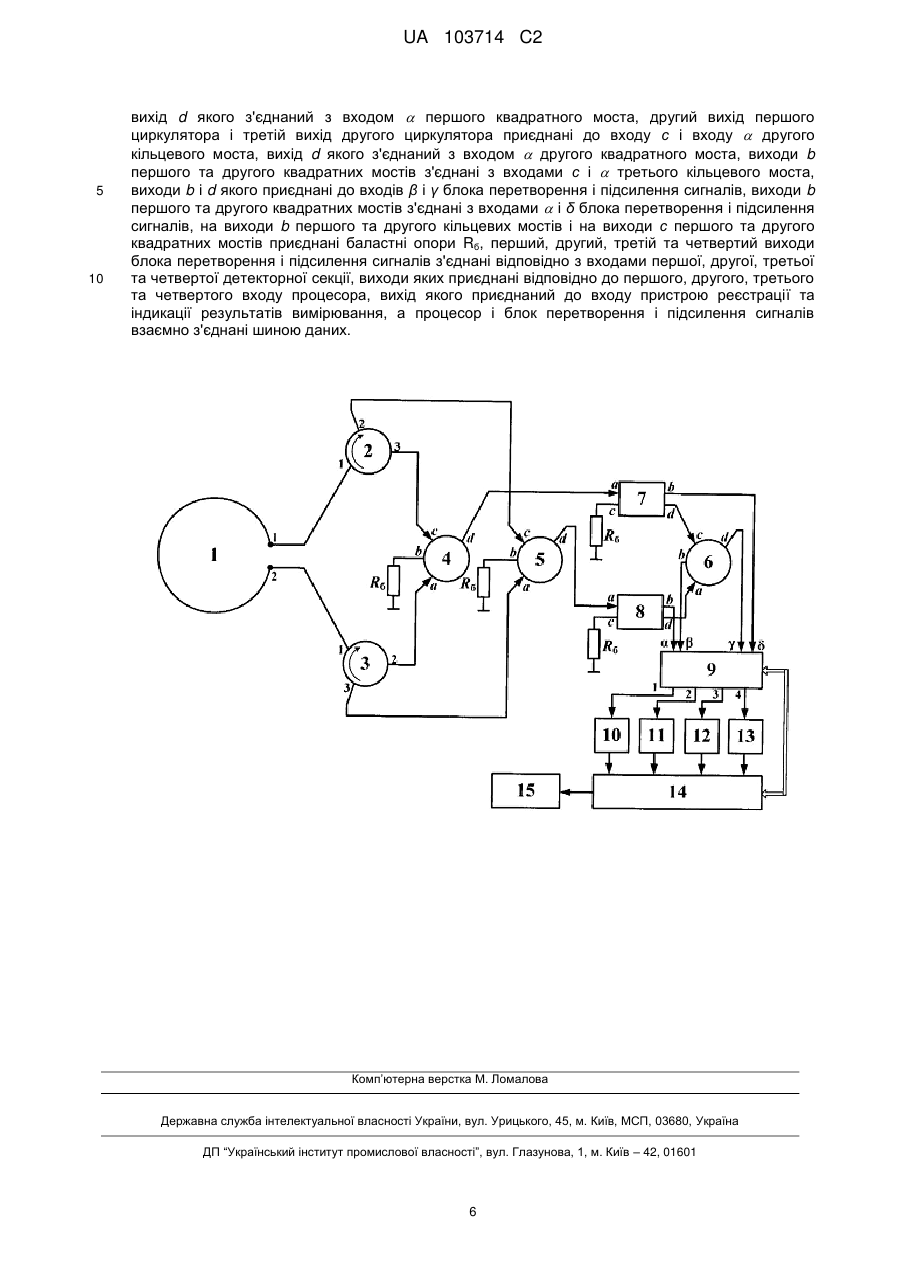
Кільцева вимірювальна антенна система, яка містить антену, що складається з кільця та затискачів, яка відрізняється тим, що додатково до першого і другого затискачів кільця підключені перші входи першого та другого циркуляторів, третій вихід першого циркулятора і другий вихід другого циркулятора приєднані до входу с і входу a першого кільцевого моста, вихід d якого з'єднаний з входом a першого квадратного моста, другий вихід першого циркулятора і третій вихід другого циркулятора приєднані до входу с і входу a другого кільцевого моста, вихід d якого з'єднаний з входом a другого квадратного моста, виходи b першого та другого квадратних мостів з'єднані з входами с і a третього кільцевого моста, виходи b і d якого приєднані до входів β і γ блока перетворення і підсилення сигналів, виходи b першого та другого квадратних мостів з'єднані з входами a і δ блока перетворення і підсилення сигналів, на виходи b першого та другого кільцевих мостів і на виходи с першого та другого квадратних мостів приєднані баластні опори Rб, перший, другий, третій та четвертийвиходи блока перетворення і підсилення сигналів з'єднані відповідно з входами першої, другої, третьої та четвертої детекторної секції, виходи яких приєднані відповідно до першого, другого, третього та четвертого входу процесора, вихід якого приєднаний до входу пристрою реєстрації та індикації результатів вимірювання, а процесор і блок перетворення і підсилення сигналів взаємно з'єднані шиною даних.
Текст
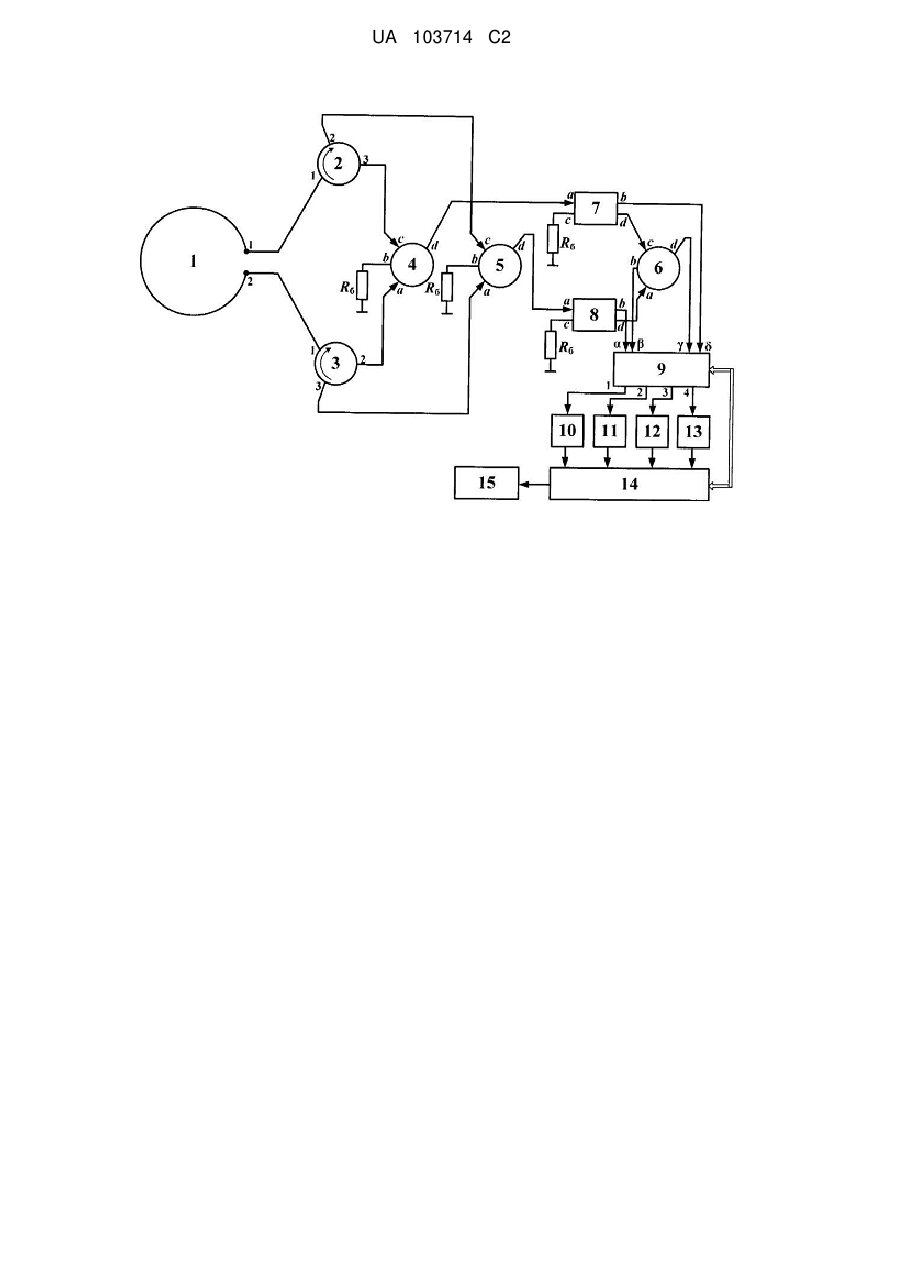
Реферат: Кільцева вимірювальна антенна система належить до радіотехніки і може бути застосована в стаціонарних та мобільних системах зв'язку. Антенна система містить антену, що складається з кільця та затискачів. Додатково до першого і другого затискачів кільця підключені перші входи першого та другого циркуляторів, третій вихід першого циркулятора і другий вихід другого циркулятора приєднані до входу с і входу першого кільцевого моста, вихід d якого з'єднаний з входом першого квадратного моста. Другий вихід першого циркулятора і третій вихід другого циркулятора приєднані до входу с і входу другого кільцевого моста, вихід d якого з'єднаний з входом другого квадратного моста, виходи b першого та другого квадратних мостів з'єднані з входами с і третього кільцевого моста, виходи b і d якого приєднані до входів β і γ блока перетворення і підсилення сигналів, виходи b першого та другого квадратних мостів з'єднані з входами і δ блока перетворення і підсилення сигналів. На виходи b першого та другого кільцевих мостів і на виходи с першого та другого квадратних мостів приєднані баластні опори Rб. Перший, другий, третій та четвертий виходи блока перетворення і підсилення сигналів з'єднані відповідно з входами першої, другої, третьої та четвертої детекторної секції, виходи яких приєднані відповідно до першого, другого, третього та четвертого входу процесора, вихід якого приєднаний до входу пристрою реєстрації та індикації результатів вимірювання. Процесор і блок перетворення і підсилення сигналів взаємно з'єднані шиною даних. Технічним результатом є визначення напрямку обертової поляризації хвилі, що приймається, збільшення ефективності прийому, зменшення похибки у вимірюванні напруженості поля та спрощення подальшого аналізу прийнятого інформаційного сигналу. UA 103714 C2 (12) UA 103714 C2 UA 103714 C2 5 10 15 20 25 30 35 40 45 Винахід належить до галузі радіотехніки і може бути використаний для вимірювання параметрів електромагнітного поля при вирішенні питань електромагнітної сумісності радіоелектронних систем, встановлених як на стаціонарних, так і на рухомих об'єктах. Відома активна рамкова антена [1], що складається з двох однотипних рамок, вхідного узгоджуючого трансформатора та підсилювача. Недоліком такої антени є неможливість керування напрямком максимального випромінювання і адаптації до поляризації поля. З відомих антен найбільш близькою за технічною суттю є малоелементна антенна решітка обертової поляризації з керованою діаграмою спрямованості [2], що містить два кільця, двопровідну лінію, два шлейфи, два короткозамикачі. Недоліком такої антени є неможливість виділити із суміші електрорушійних сил, які наводяться електромагнітними хвилями лівого і правого обертання, відповідні їм напруги. Задачею винаходу є забезпечення здатності елементів схеми до можливості визначення напрямку обертової поляризації хвилі, що приймається. Це дозволяє збільшити ефективність прийому, зменшити похибки у вимірюванні напруженості поля і спрощує подальший аналіз прийнятого інформаційного сигналу. Поставлена задача вирішується тим, що до першого і другого затискачів антени, яка складається з кільця, згідно з винаходом, підключені перші входи відповідно першого та другого циркуляторів, третій вихід першого циркулятора і другий вихід другого циркулятора приєднані відповідно до входу с і входу а першого кільцевого моста, вихід якого d з'єднаний з входом α першого квадратного моста, другий вихід першого циркулятора і третій вихід другого циркулятора приєднані відповідно до входу с і входу а другого кільцевого моста, вихід якого d з'єднаний з входом а другого квадратного моста; виходи b першого та другого квадратних мостів з'єднані відповідно з входами с і α третього кільцевого моста, виходи якого b і d приєднані відповідно до входів β і γ блока перетворення і підсилення сигналів, виходи b першого та другого квадратних мостів з'єднані відповідно з входами α і δ блока перетворення і підсилення сигналів; на виходи b першого та другого кільцевих мостів і на виходи с першого та другого квадратних мостів приєднані баластні опори Rб; перший, другий, третій та четвертий виходи блока перетворення і підсилення сигналів з'єднані відповідно з входами першої, другої, третьої та четвертої детекторної секції, виходи яких приєднані відповідно до першого, другого, третього та четвертого входу процесора, вихід якого приєднаний до входу пристрою реєстрації та індикації результатів вимірювання; процесор і блок перетворення і підсилення сигналів взаємно з'єднані шиною даних. На кресленні зображена структурна схема кільцевої вимірювальної антенної системи. Кільцева вимірювальна антенна система містить антенне кільце 1, два циркулятори 2 і 3, три кільцевих моста 4, 5, 6, два квадратних моста 7 і 8, блок перетворення і підсилення сигналів 9, чотири детекторних секції 10, 11, 12, 13, процесора 14 і пристрій реєстрації та індикації результатів вимірювання 15, чотири баластних опори Rб. Кільцева вимірювальна антенна система працює таким чином. Кільцева антена 1 являє собою металеве коло радіуса α з одним розривом між точками 1-2. Точки 1-2 є затискачами антени. Якщо антена використовується як передавальна, то до точок 12 підводиться струм, у приймальній антені з точок 1-2 знімають напругу, яка наводиться в провіднику кільцевої форми. Розглядають функціонування антени в режимі приймання радіохвиль. В полярній системі координат вектор напруженості електричного поля в ортогональному коловому поляризаційному базисі записують у вигляді 0E1 0 (t 1 ); e( t ) 0E 2 0 (t 2 ), 50 (1) де 0 , - орти полярної системи координат; - колова частота обертання вектора напруженості електричного поля; t - момент часу; Е1, Е2 - амплітуди напруженості поля хвиль колової поляризації правого і лівого напряму обертання; 1, 2 - початкові фази вектора 0 в момент часу t=0, які визначають початкові положення векторів Е1 і Е2 в полярній системі координат відносно полярної осі 0х. У прямокутній системі координат той самий вектор e записують як 55 1 UA 103714 C2 e x0 Ex y0 E , (2,а) або у часовій площині e( t ) x 0E x cos(t ) y 0E y cos(t ) , 5 Ех. (2,б) де x 0 , y 0 - орти прямокутної системи координат, - фазовий зсув складової Еу відносно Використовуючи ортогональний коловий поляризаційний базис, вираз (2,б) представляють таким чином . y Ey Ey sin( t ) y 0 cos(t ); e пp x 0 2 2 e y y 0E y cos(t ) e y x E y sin( t ) y E y cos(t ), 0 0 лів 2 2 Ex Ex x e пp x 0 2 cos t y 0 2 sin t; e x x 0E x cos t e x x E x cos t y E x sin t, 0 0 лів 2 2 (3) 10 Вводять такі позначення b1 1 2m sin m 2 ; . b 2 1 2m sin m 2 ; m cos 1 m sin sin 1 ; cos 1 ; b1 b1 m cos 1 m sin sin 2 ; cos 2 . b2 b2 m 15 Ey Ex ; (4) За допомогою позначень (4) з виразів (3) знаходять вектори напруженості електричного поля правого і лівого обертання x y eпp eпp eпp E1x 0 cos(t 1 ) y 0 sin( t 1 ); , x y e лів e лів e лів E 2 x 0 cos(t 2 ) y 0 sin( t 2 ); (5) де E x b1 ; 2 . E b Е 2 x 2 . 2 Е1 20 25 (6) Порівнюючи вирази (1) і (5), роблять висновок, що це тотожні значення векторів eпp і e лів , але записані в різних системах координат. Для переходу від напруженості електричного поля хвилі, що падає на антену 1, до напруги на затискачах антени 1, необхідно визначити діючу довжину кільця. Вважають, що на кільцеву антену 1 падає в напрямі осі хвиля з коловою поляризацією. Тоді напруга на затискачах кільця визначатиметься як скалярний добуток вектора напруженості поля eпp і вектора діючої довжини кільця 2 UA 103714 C2 Uпp (eпp , l0k ) . 5 10 (7) Математичний зміст діючої довжини кільця у виразі (7) збігається з визначенням діючої довжини приймальної антени. Але діючу довжину будь-якої антени ототожнюють з довжиною вібратора з рівномірним розподілом струму, який створює в напрямі максимального випромінювання ту ж напруженість електричного поля, що і реальна антена за умови однакових струмів на затискачах. Оскільки кільце підкоряється принципу взаємності, то таке визначення є справедливим і для приймальної антени. Отже, діюча довжина є параметр, який у відповідності до основного визначення може характеризувати антену лише для складових, отриманих при розкладанні хвилі довільної поляризації у лінійному ортогональному поляризаційному базисі. Використовуючи праву частину першого рівняння системи (5), вираз (7) записують у вигляді к Unp E1 x 0 cos(t 1) y 0 sin( t 1), lд . 15 (8) З виразу (8) випливає, що при лінійній поляризації lк x 0l д , або lдк у 0 l д , де l д - діюча д довжина кільця за умови, що хвиля, яка падає на антену 1, лінійно поляризована. Якщо ж поляризація колова, то діючу довжину кільця визначають як к lд х 0 l д y 0 l д l д ( x 0 y 0 ) . 20 (9) Підставляючи значення lк з (9) у вираз (8), знаходять напругу на затискачах антени 1 д колової поляризації при прийманні хвилі правої поляризації Uпp 2E1l д cos t 1 .4 (10) При прийманні антеною 1 хвилі лівої поляризації Uлів 2E 2l д cos t 2 . 4 (11) 25 З формул (8), (10) і (11) видно, що кільцева антена 1 у порівнянні з симетричним вібратором, 30 діюча довжина якого l д , створює напругу на затискачах в 2 разів більшу. З виразів (1) видно, що в певні моменти часу вектори напруженості електричного поля правого і лівого обертання будуть збігатися. Очевидно, що в ці моменти часу кутові координати векторів дорівнюватимуть одному і тому ж куту, тобто t s 1 2s ; , t s 1 2s , 35 (12) де ts=t1+(s-1)T, s 1 , t1 - перший момент часу, при якому виконуються рівняння (12), Τ , період електромагнітних коливань (час, за який вектор e (t) обходить поляризаційний еліпс), кут, який відраховується від осі 0x і при якому модуль вектора e (t) набуває максимального значення. Отже, в моменти часу ts вектори eпp (t) і e лів (t) знаходимуться на великій півосі поляризаційного еліпса. З виразів (12) випливає, що кут нахилу великої осі поляризаційного еліпса визначається як 2 . 1 2 (13) 40 3 UA 103714 C2 Зсув фаз напруг правого (10) і лівого (11) напряму обертання дорівнює 1 2 . 2 (14) Порівнюючи вирази (13) і (14), знаходять, що 5 2. (15) 2 Решту параметрів поляризаційного еліпса визначають таким чином. Велика піввісь поляризаційного еліпса αe=Ε1+Е2, а мала піввісь - bе=Е1-Е2. Отже, знак і величина коефіцієнта еліптичності визначається так 10 b E E2 . Ke e 1 a e E1 E 2 (16) Оскільки амплітуди напруг (10) і (11) однозначно залежать від напруженостей полів Е1 і Е2 A Uпp 2E1l д ; (17) A U лів 2E 2l д , 15 то коефіцієнт еліптичності обчислюють і за амплітудами напруг на затискачах антени 1 Ke 20 25 30 35 40 45 A А Uпр Uлів A А Uпр Uлів . (18) Формули (15) і (18) доводять, що всі параметри поляризаційного еліпса однозначно можна обчислити за напругами на затискачах кільцевої антени. На затискачах 1 і 2 кільця наводиться напруга, яка являє собою суму напруг хвиль правої і лівої колової поляризації. Оскільки напруги Uпр і Uлів не мають жодних ознак, за якими їх можна було б розділити, то необхідно розглянути, яким чином утворюються ці напруги. З рівнянь (1) випливає, що електромагнітна хвиля обертової поляризації в провіднику кільцевої форми буде наводити розподілені електрорушійні сили, під дією яких протікатиме хвиля електричного струму. Очевидно, що при узгодженому навантаженні хвиля струму правого обертання протікатиме по колу від затискача 1 до затискача 2. Хвиля струму лівого обертання протікатиме від затискача 2 до затискача 1. Використовуючи цей електричний процес, можна виокремити і напруги на затискачах антени 1. Нехай циркулятори 2 і 3 функціонують таким чином, щоб хвиля електричного струму, яка надходить в плече 1, проходила в плече 2, з плеча 2 проходила лише в плече 3, а із плеча 3 тільки в плече 1. Такі шестиполюсні Y-циркулятори будують в мікросмужковому виконанні на феритах. Працюють вони в діапазонах частот від 20-30 МГц до 30 ГГц, тобто вони придатні для антен дуже високих, ультрависоких і надвисоких частот. Очевидно, що навантаження на кільцеву антену 1 повинно узгоджуватись із вхідним опором, тобто опором випромінювання RΣ. Відрізки з'єднувальних ліній необхідно виконувати так, щоб їх хвильовий опір дорівнював W л.п.=RΣ/2. Циркулятори 2 і 3 будують так, щоб їх вхідні опори плечей також дорівнювали RΣ/2, а всі опори, що навантажують плечі циркуляторів 2 і 3, повинні бути однакові за величиною і дорівнювати також RΣ/2. За цих умов всі елементи структурної схеми будуть узгоджені між собою і теоретично досягається повний розподіл хвиль правого і лівого обертання. Подальша обробка сигналів може забезпечити вимірювання всіх необхідних величин. Напруги правого обертання на виході 3 циркулятора 2 і на виході 2 циркулятора 3 знаходяться у протифазі. Тому в плечі d кільцевого моста 4 утвориться повне значення напруги (10), а в плечі b з'явиться різниця напруг. Аналогічно і в плечі d моста 5 виникне повна напруга лівого обертання (11). 4 UA 103714 C2 5 10 Оскільки відносно горизонтальної осі (осі 0х) і антена 1 і схема обробки сигналів симетричні, то значення амплітуд напруг на входах а і с мостів 4 і 5 однакові, а їх різниця (сума протифазних напруг) в плечах b кільцевих мостів 4 і 5 дорівнюватиме нулю. Отже, в принципі через балансні опори Rб струм не протікатиме. Для вимірювання фазового зсуву (14) потужності хвиль правого і лівого обертання мостами 7 і 8 діляться на дві рівні частини. Одна з цих частин, а саме з виходів b, використовується для утворення сигналів з напругами правого і лівого обертання. Другі частини потужностей хвиль надходять на входи а і b кільцевого моста 6. Необхідною умовою точного вимірювання фази є забезпечення однакових довжин шляхів струмів від затискачів 1 і 2 кільцевої антени 1 до плечей α і с кільцевого моста 6. На виході плеча b кільцевого моста 6 15 20 утвориться сума високочастотних напруг Uпр Uлів з точністю до множника 1/ 2 , а в плечі d різниця напруг з тим же коефіцієнтом пропорційності. Для обробки сигналів в процесорі 14 високочастотні напруги зазнають частотного перетворення і підсилення у блоці перетворення і підсилення сигналів 9. На входи блока перетворення і підсилення сигналів 9 ,, , надходять сигнали з мостів 6, 7, 8. На входах детекторних секцій 10-13 з'являються високочастотні напруги. Оскільки мостами 7 і 8 потужності хвиль струму діляться навпіл, то значення випрямлених напруг після детекторів 10-13 будуть відрізнятися від значень (17). З виходу детектора 10 на вході процесора 14 буде діяти напруга 1 U'лів 2 А Uлів Е 2l д . (19) На виході детектора 11 з'явиться напруга U' 1 ' ' Uпp Uлів (Uпp )2 (U'лів )2 2UпpU'лів cos . 2 (20) 25 На виході детектора 12 - амплітуда різниці високочастотних напруг U' 1 2 ' ' Uпp Uлів (Uпp )2 (U'лів )2 2UпpU'лів cos . (21) На виході детектора 13 - напруга, пропорційна напруженості поля правого обертання 30 ' Uпp 1 2 А Uпp Е1l д . (22) Фазовий зсув за результатами амплітудних вимірювань обчислюємо як cos 35 (U' )2 (U' )2 ' 4UпpU'лів . (23) Коефіцієнт еліптичності і його знак знаходяться за формулою (18). Джерела інформації: 6 1. Патент СССР № 1483515, МПК H01Q 23/00, 1989. 6 2. Патент на корисну модель Україна № 44847, МПК H01Q 23/00, 2009. 40 ФОРМУЛА ВИНАХОДУ 45 Кільцева вимірювальна антенна система, яка містить антену, що складається з кільця та затискачів, яка відрізняється тим, що додатково до першого і другого затискачів кільця підключені перші входи першого та другого циркуляторів, третій вихід першого циркулятора і другий вихід другого циркулятора приєднані до входу с і входу першого кільцевого моста, 5 UA 103714 C2 5 10 вихід d якого з'єднаний з входом першого квадратного моста, другий вихід першого циркулятора і третій вихід другого циркулятора приєднані до входу с і входу другого кільцевого моста, вихід d якого з'єднаний з входом другого квадратного моста, виходи b першого та другого квадратних мостів з'єднані з входами с і третього кільцевого моста, виходи b і d якого приєднані до входів β і γ блока перетворення і підсилення сигналів, виходи b першого та другого квадратних мостів з'єднані з входами і δ блока перетворення і підсилення сигналів, на виходи b першого та другого кільцевих мостів і на виходи с першого та другого квадратних мостів приєднані баластні опори Rб, перший, другий, третій та четвертий виходи блока перетворення і підсилення сигналів з'єднані відповідно з входами першої, другої, третьої та четвертої детекторної секції, виходи яких приєднані відповідно до першого, другого, третього та четвертого входу процесора, вихід якого приєднаний до входу пристрою реєстрації та індикації результатів вимірювання, а процесор і блок перетворення і підсилення сигналів взаємно з'єднані шиною даних. Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: H01Q 23/00
Мітки: кільцева, вимірювальна, система, антенна
Код посилання
<a href="https://ua.patents.su/8-103714-kilceva-vimiryuvalna-antenna-sistema.html" target="_blank" rel="follow" title="База патентів України">Кільцева вимірювальна антенна система</a>
Кільцева антенна решітка
Номер патенту: 89946
Опубліковано: 25.03.2010
Автори: Чеботов Олександр Володимирович, Кочергін Анатолій Георгійович, Кулагін В'ячеслав Володимирович
МПК: H01Q 3/26
Мітки: решітка, кільцева, антенна
Формула / Реферат:
1. Кільцева антенна решітка, яка містить N еквідистантно розташованих по колу антенних елементів, N фазообертачів, N атенюаторів, суматор і блок керування, вихід якого з'єднаний з керуючими входами фазообертачів і атенюаторів, вихід кожного фазообертача підключений до входу відповідного атенюатора, яка відрізняється тим, що додатково введені Μ блоків перемноження, де Μ дорівнює числу сполучень з N антенних елементів по два,...
Антенна система рлс
Номер патенту: 36533
Опубліковано: 27.10.2008
Автори: Бортнік Володимир Іванович, Пацуля Сергій Миколайович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Бортюк Леонід Володимирович, Селіванов Вячеслав Олексійович, Новиков Олексій Прокопович
МПК: H01Q 21/22, H01Q 19/00
Формула / Реферат:
Антенна система РЛС, що містить приймально-передавальну фазовану антенну решітку наземного радіолокаційного запитувача, що складається з первинних випромінювачів, виходи яких з'єднані з відповідними входами суматора потужності радіолокаційного запитувача, виходи якого є виходами основного і додаткового каналів наземного радіолокаційного запитувача, цифрову антенну решітку, що складається з лінійних випромінювачів, аналогової приймальної...
Мікрокомп’ютерна електромагнітна пошуково-вимірювальна система
Номер патенту: 37807
Опубліковано: 15.05.2001
Автори: Драбич Олег Петрович, Драбич Петро Петрович, Драбич Петро Петрович (мол.)
МПК: G01V 3/10, G01R 19/00
Мітки: мікрокомп'ютерна, електромагнітна, система, пошуково-вимірювальна
Текст:
...напруг 9 приєднані початки другої і третьої вимірювальних котушок 5 і 6, закінчення вимірювальних котушок 4, 5 і 6 підключені до шини нульового потенціалу, виходи першого і другого віднімачів напруг 8 і 9 через вибірні підсилювачі 11 і 12 підключені мультиплексора 13, вихід якого з'єднаний з входом першого керованого підсилювача 14, вихід цього підсилювача з'єднаний з входом першого аналого-цифрового перетворювача 15, входи формувача...
Багатофункціональна мікрокомп’ютерна електромагнітна пошуково-вимірювальна система
Номер патенту: 89101
Опубліковано: 25.12.2009
Автори: Стецько Ігор Григорович, Драбич Петро Петрович, Драбич Олег Петрович, Дуб Петро Богданович
МПК: G01R 19/00, G01V 3/10
Мітки: багатофункціональна, електромагнітна, система, мікрокомп'ютерна, пошуково-вимірювальна
Формула / Реферат:
Багатофункціональна мікрокомп'ютерна електромагнітна пошуково-вимірювальна система, яка складається з першої калібрувальної та ближньої до осі комунікації вимірювальної котушок, намотаних на першому феритовому осерді, другої калібрувальної та середньої вимірювальної котушок, намотаних на другому феритовому осерді, третьої калібрувальної та дальньої вимірювальної котушок, намотаних на третьому осерді, генератора калібрувальних сигналів,...
Активна фазована антенна решітка з фантомними випромінюючими каналами
Номер патенту: 40298
Опубліковано: 25.03.2009
Автори: Смідович Ольга Володимірівна, Зацерковський Руслан Олексійович
МПК: H01Q 21/00
Мітки: решітка, фантомними, каналами, фазована, активна, випромінюючими, антенна
Формула / Реферат:
Активна фазована антенна решітка з фантомними випромінюючими каналами, що включає блок антенних модулів у складі М канальних випромінювачів, М канальних високочастотних (ВЧ) модулів, з'єднаних своїми виходами "Випромінювання" з входами відповідних М канальних випромінювачів, М канальних вимірників потужності, з'єднаних своїми аналоговими входами з виходами контрольних сигналів відповідних М канальних ВЧ модулів, тракт сигналів...
Попередній патент: Пристрій для реструктуризації графіту на алмаз
Наступний патент: Спосіб виробництва майонезу з добавкою гідролізату з молюсків
Випадковий патент: Похідні ізоксазолопіридину