Спосіб визначення різниці фаз
Номер патенту: 105933
Опубліковано: 10.07.2014
Автори: Рожковський Володимир Фаустович, Куінн Наталія Олександрівна, Кудрєватих Олександр Тихонович
Формула / Реферат
Спосіб визначення різниці фаз, який полягає в тому, що промінь від джерела когерентного випромінювання перетворюють на два пучки, за допомогою оптичної системи формують зображення контрольованого об'єкта на матриці цифрового реєстратора, підключеного до пристрою зберігання і обробки даних, реєструють послідовно за допомогою матриці розподіл інтенсивності першого пучка, розподіл інтенсивності другою пучка, розподіл інтенсивності при одночасному використанні першого і другого пучків для початкового і зміненого стану об'єкта контролю, на основі даних вимірювань інтенсивностей для кожного елемента матриці реєстратора розраховують значення фаз і різниць фаз, відповідних різним станам об'єкта, який відрізняється тим, що в процесі послідовної реєстрації зображень за допомогою масок частково перекривають кожний з пучків так, щоб області перекриття першого і другого пучків відповідали різним ділянкам матриці цифрового реєстратора, порівнюють інтенсивності для елементів матриці реєстратора, що знаходяться в області кожної з масок, на зображеннях, зареєстрованих з одним пучком, і зображеннях, зареєстрованих з двома пучками, і враховують зміну інтенсивності для даних ділянок при розрахунку фаз.
Текст
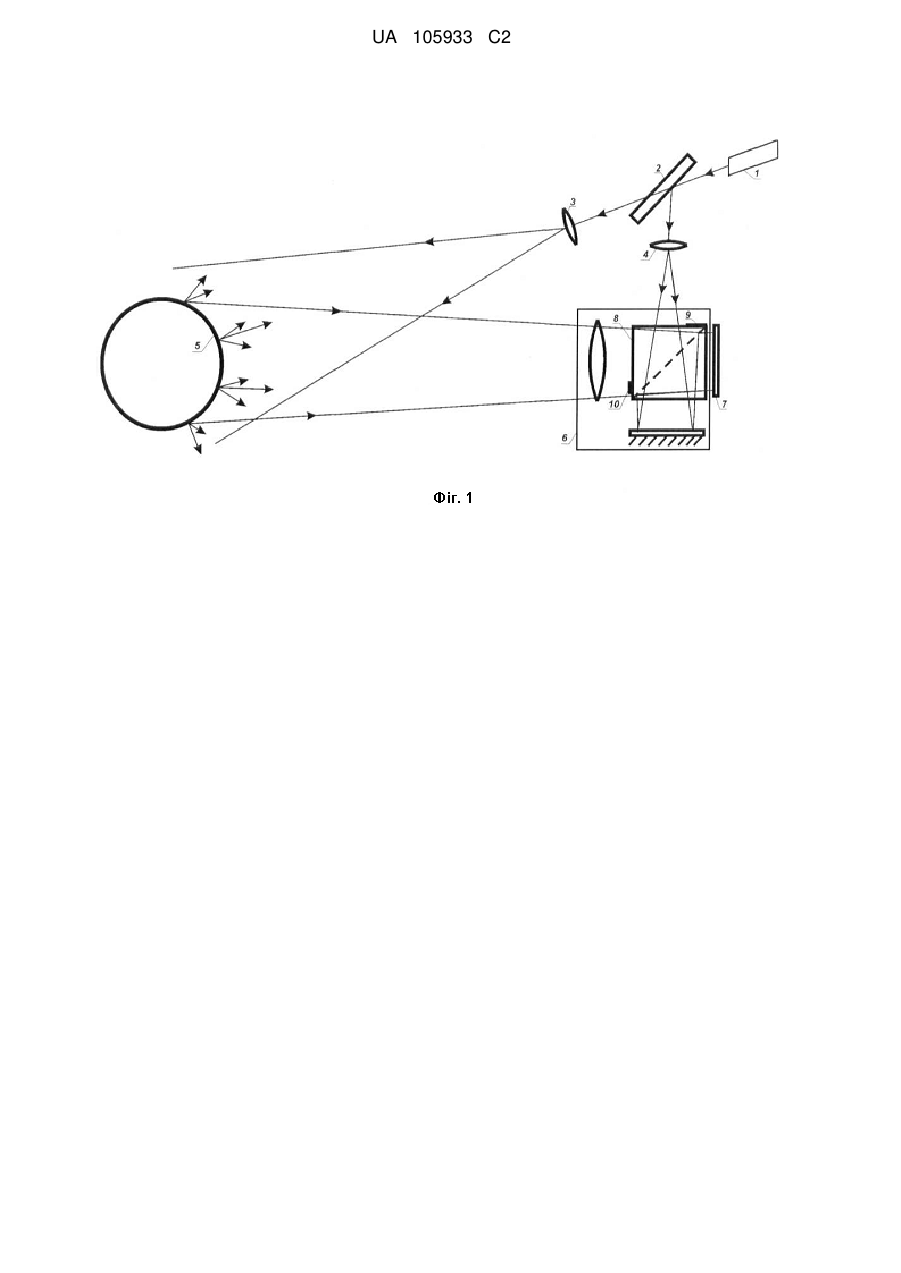
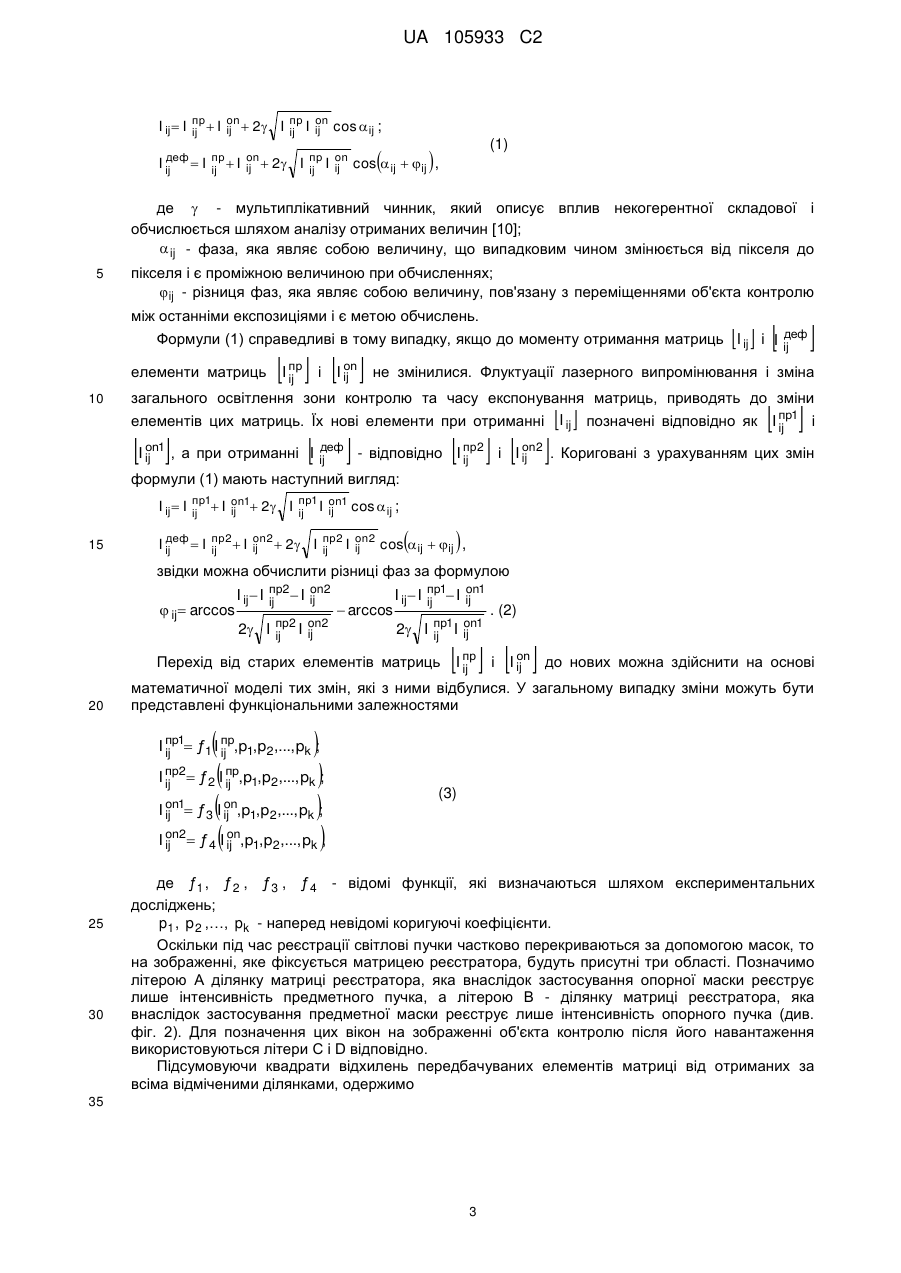
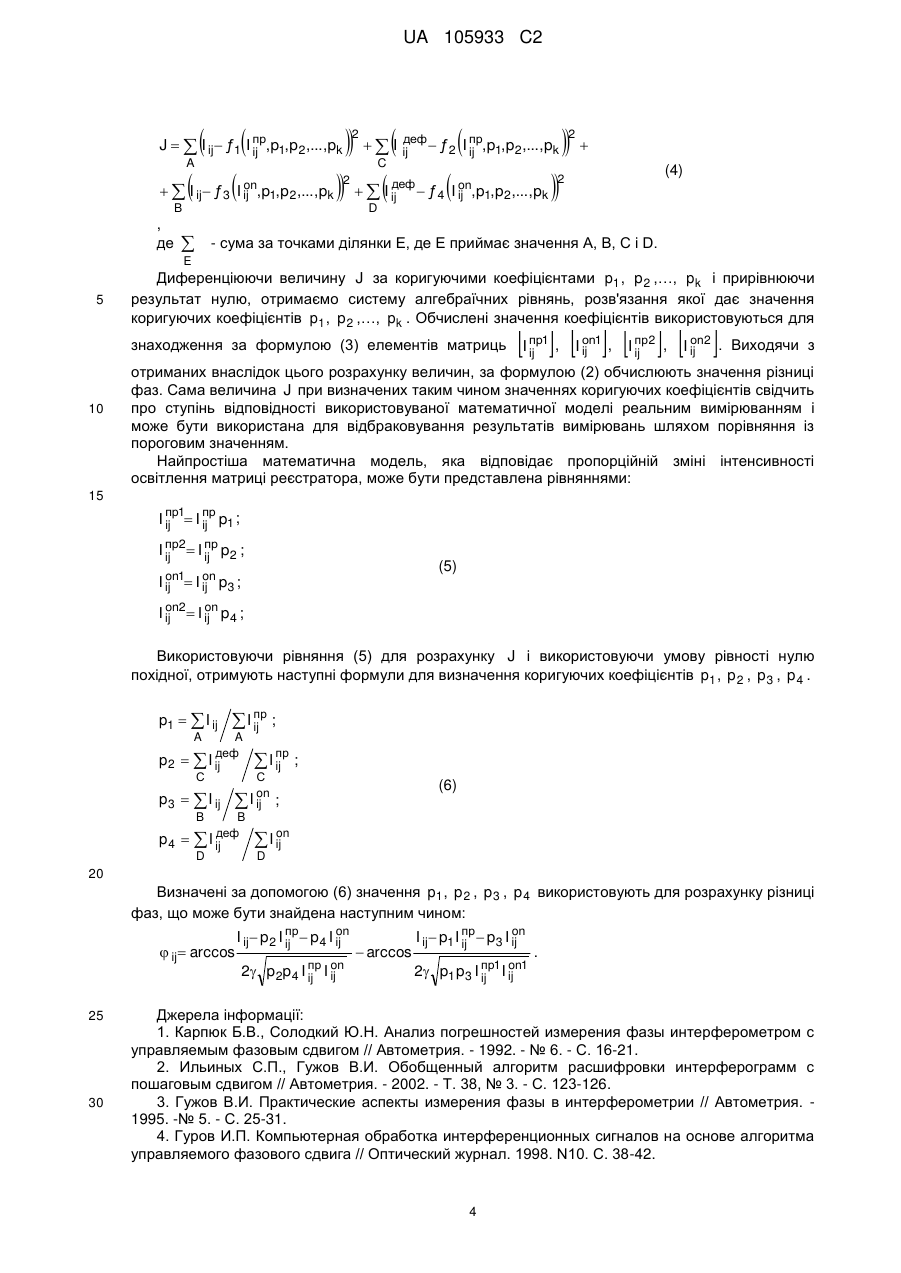
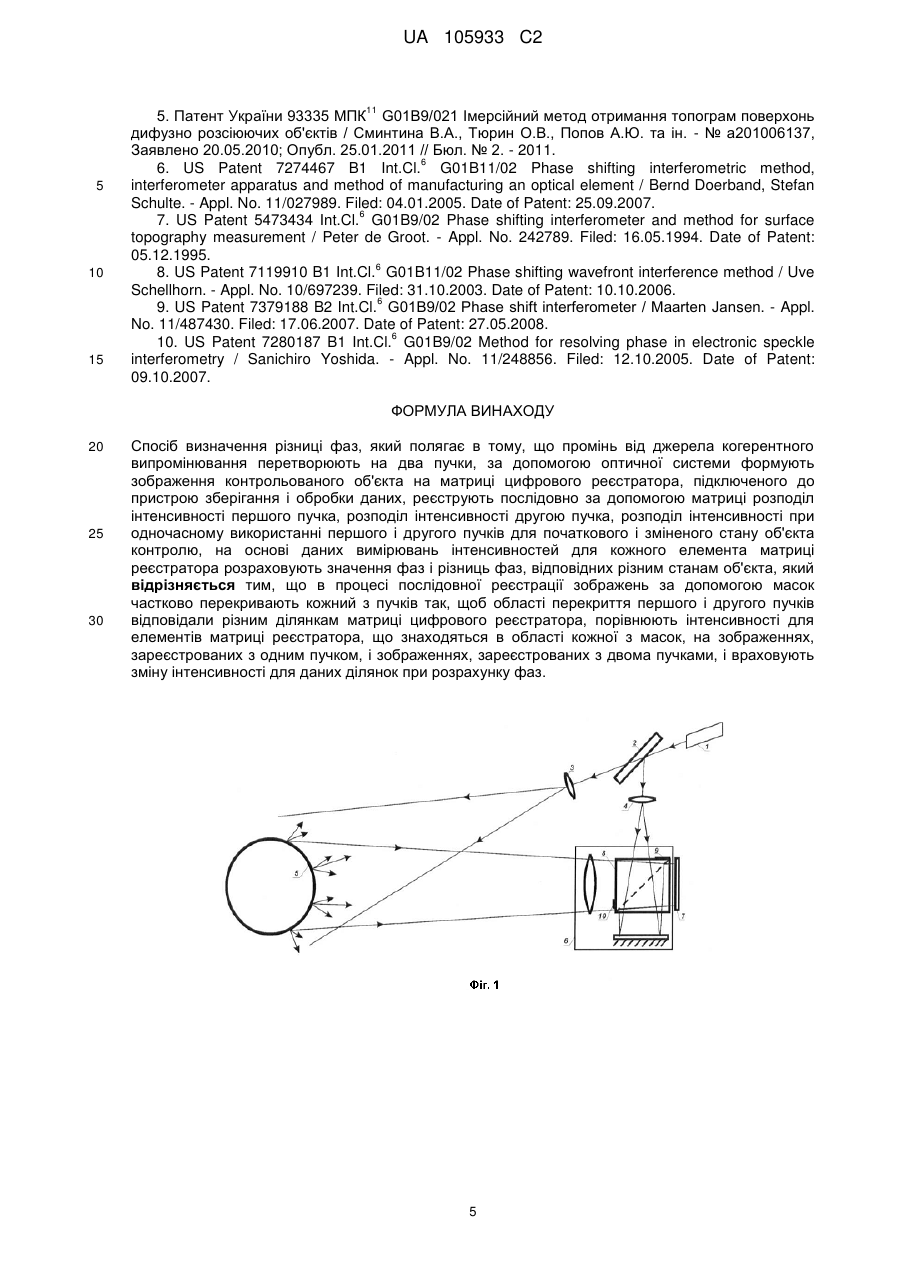
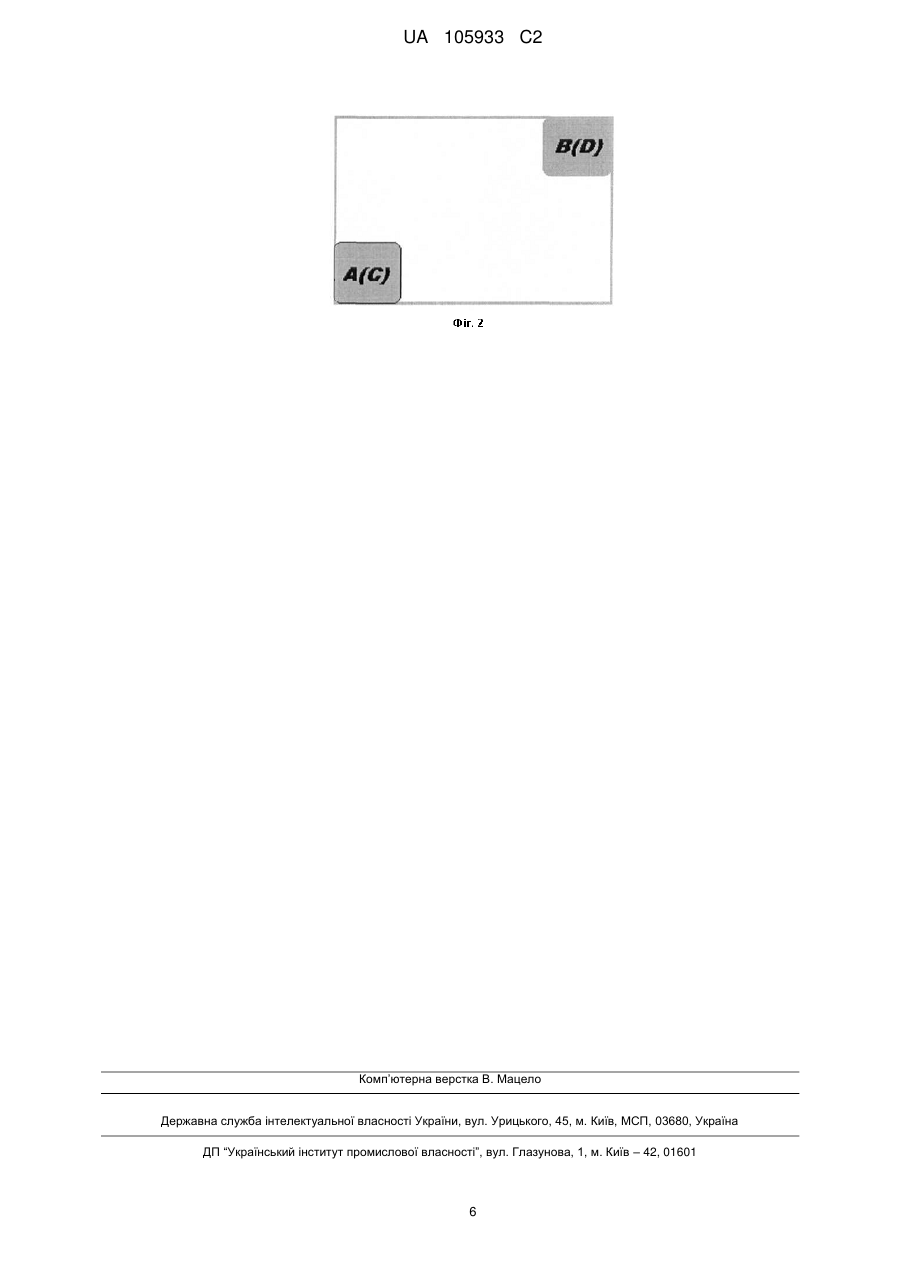
Реферат: Спосіб визначення різниці фаз полягає у тому, що в процесі послідовної реєстрації зображень за допомогою масок частково перекривають кожний з пучків, які використовуються для формування зображення таким чином, щоб області перекриття першого і другого пучків відповідали різним ділянкам матриці цифрового реєстратора. Порівнюють інтенсивності для елементів матриці реєстратора, що знаходяться в області кожної з масок, на зображеннях, зареєстрованих з одним пучком, і зображеннях, зареєстрованих з двома пучками, і враховують зміну інтенсивності для даних ділянок при розрахунку фаз. UA 105933 C2 (12) UA 105933 C2 UA 105933 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до оптичних методів контролю і може бути використаний для неруйнівного контролю і технічної діагностики виробів машинобудування. Зокрема, даний спосіб може бути використаний для досліджень на основі методів голографічної і спекл-інтерферометрії, а також ширографії, при умові реєстрації за допомогою матричних систем цифрового запису зображень, які відображають зміни, що відбуваються в об'єкті контролю або в зоні контролю. Дані методи контролю базуються на визначенні величини різниці фаз світлових пучків, що формують зображення контрольованого об'єкту в площині матриці світлочутливої системи реєстрації, і зміни цієї різниці фаз внаслідок деформування об'єкта контролю. В даний час існують різноманітні способи визначення різниці фаз пучків, що формують зображення. Зокрема, широко відомий метод фазових зсувів, який передбачає використання пристроїв, заснованих на цифровій реєстрації зображення об'єкта (ПЗЗ-матриць), і високошвидкісних пристроїв введення, зберігання і обробки відеоінформації і дозволяє розраховувати різницю фаз пучків, що інтерферують, використовуючи серію послідовних кадрів, одержаних при контрольованій зміні фази одного із світових пучків, задіяних у формуванні зображень [1-5]. Зміна фази може здійснюватися різними способами. Найбільш поширеним способом зміни фази світлового пучка є керований зсув або обертання елементів оптичної схеми (дзеркал, лінз, інших оптичних елементів), що формують пучок [6, 7]. Крім того, керована зміна фази пучка може бути здійснена шляхом розташування в каналі його розповсюдження багатоступінчатої матриці, що складається з прозорих пластин із змінною за заданим законом товщиною. При цьому зміна оптичної довжини шляху для даного пучка приводить до зміни різниці фаз світових пучків, що реєструються матрицею [8]. Одним із різновидів методу зсуву фази є використання при формуванні зображення світлових пучків різної поляризації [9]. Способи визначення фази, засновані на застосуванні керованого зсуву фази або на використанні поляризаційних властивостей пучків, що беруть участь у формуванні зображення на матриці реєстратора, вимагають дуже точного юстування і якості виготовлення елементів оптичної схеми установки, ретельного контролю процесів управління величиною зсуву оптичних елементів і зміною поляризації світла. Будь-яка зміна величини зсуву фази, що обумовлена нестаціонарністю процесів в ланцюгах управління механізмами зсуву і повороту, механічним зносом елементів управління зсувом, або зміною властивостей матеріалів ступінчастих матриць, використовуваних для створення фазового зсуву, призводить до зниження точності вимірювань і, отже, до зниження достовірності результатів контролю. Крім того, метод фазового зсуву не може бути використаний у разі дослідження процесів, які не забезпечують точне відтворення стану контрольованого об'єкта, зокрема, при дослідженні процесів повзучості і текучості. Відомий також спосіб визначення фази, вибраний як прототип, згідно з яким промінь від джерела когерентного випромінювання перетворюють у два пучки, за допомогою оптичної системи формують зображення контрольованого об'єкта на матриці цифрового реєстратора, підключеного до пристрою зберігання і обробки даних, реєструють послідовно за допомогою матриці розподіл інтенсивності першого пучка, розподіл інтенсивності другого пучка, розподіл інтенсивності при одночасному використанні першого і другого пучків для початкового і зміненого стану об'єкту контролю, на основі даних вимірювань інтенсивностей для кожного елемента матриці реєстратора розраховують значення фаз і різниць фаз, відповідних різним станам об'єкту [10]. Алгоритм обробки дозволяє обчислити значення різниці фаз, що характеризує деформацію об'єкта під впливом навантаження, без використання методу зсуву фази, що дозволяє усунути всі недоліки, пов'язані з точністю управління величиною зсуву. Крім того, оскільки для визначення різниці фаз використовується всього одне зображення, відповідне даному стану об'єкта, усувається проблема відтворюваності стану об'єкта, а отже розширюється область застосування методу. Перевагою даного методу у порівнянні із методом зсуву фаз є також скорочення кількості зображень, необхідних для отримання даних, які використовуються для розрахунку фази. Це приводить до істотного прискорення процесу контролю без зниження точності результатів контролю. Описаний спосіб є найбільш близьким по технічній суті до винаходу, що заявляється. Проте він, як і методи зсуву фази, не дозволяє вирішити проблему усунення погрішності визначення фази, обумовленої зміною інтенсивності пучків, що реєструються ПЗЗ-матрицею в різні моменти часу, тобто при роздільній реєстрації кожного із пучків та при їх одночасній реєстрації для різних станів навантаження об'єкта контролю. Зміна інтенсивності пучків можлива внаслідок зміни рівня загальної освітленості зони контролю, а також внаслідок флуктуацій інтенсивності лазерного випромінювання. Крім того, не передбачений механізм контролю зміни часу 1 UA 105933 C2 5 10 15 20 25 30 35 40 45 50 експозиції при реєстрації зображень, пов'язаний з особливостями процесу реєстрації сигналу в ПЗЗ-матриці. В основу винаходу поставлена задача удосконалення процесу реєстрації інтерферограм з метою виключення похибок, пов'язаних з флуктуаціями інтенсивності лазерного випромінювання і зміною умов освітленості контрольованого об'єкта. Вирішення цієї задачі дозволить підвищити достовірність і точність результатів контролю. Поставлена задача вирішується тим, що в способі, який полягає в тому, що промінь від джерела когерентного випромінювання за допомогою системи оптичних елементів перетворюють у два пучки, за допомогою оптичної системи формують зображення контрольованого об'єкта на матриці цифрового реєстратора, підключеного до пристрою зберігання і обробки даних, реєструють послідовно за допомогою матриці розподіл інтенсивності першого пучка, розподіл інтенсивності другого пучка, розподіл інтенсивності при одночасному використанні першого і другого пучків для початкового і зміненого стану об'єкта контролю, на основі даних вимірювань інтенсивностей для кожного елемента матриці реєстратора розраховують значення фаз і різниць фаз, відповідних різним станам об'єкта, згідно з винаходом, в процесі послідовної реєстрації зображень при одночасному освітленні матриці реєстратора двома пучками за допомогою масок частково перекривають кожний з пучків так, щоб області перекриття першого і другого пучків відповідали різним ділянкам матриці цифрового реєстратора, порівнюють інтенсивності для елементів матриці реєстратора, що знаходяться в області кожної з масок, на зображеннях, зареєстрованих з одним пучком, і зображеннях, зареєстрованих з двома пучками, і враховують зміну інтенсивності для даних ділянок при визначенні коригуючих коефіцієнтів і подальшому розрахунку фаз. Використання алгоритму порівняння інтенсивності в області масок на знімках, одержаних в різні моменти часу, дозволяє врахувати всі зміни інтенсивності пучків, що реєструються ПЗЗматрицею в різні моменти часу, обумовлені як флуктуацією інтенсивності когерентного випромінювання, так і зміною загальної освітленості зони контролю. Крім того, даний алгоритм дозволяє врахувати також зміни, обумовлені можливою різницею в часі експозиції при послідовній реєстрації знімків. Спосіб дозволяє здійснювати розрахунок різниці фаз незалежно від того, який з методів буде використаний в процесі експериментальних досліджень, тобто він може бути застосований і в голографічній, і в спекл-інтерферометрії, і в ширографії. На фіг. 1-2 наведені креслення, які пояснюють умови здійснення реєстрації зображень в ході контролю, де на фіг. 1 наведена експериментальна схема для контролю із застосуванням методу голографічної інтерферометри, а на фіг. 2 представлена картина розподілу інтенсивності в площині матриці реєстратора на етапі реєстрації зображення вихідного стану об'єкта контролю із застосуванням двох пучків одночасно. При здійсненні контролю з використанням методу голографічної інтерферометри заявлений спосіб реалізовується таким чином. Промінь від джерела випромінювання 1 за допомогою світлодільника 2 розбивається на два напрями - опорний і предметний (див. фіг. 1). За допомогою оптичних елементів 3, 4 формують предметний пучок, який освітлює об'єкт контролю 5, і опорний пучок. Розсіяний об'єктом контролю 5 предметний пучок і опорний пучок за допомогою системи формування зображення 6 направляють на реєстратор 7. Інформація про розподіл інтенсивності в площині матриці цифрового реєстратора зображень вводиться в пристрій обробки інформації, де шляхом аналізу одержаних зображень за певними алгоритмами перетворюється в картину розподілу різниці фаз і потім у поле переміщень поверхні об'єкта. На світлодільник 8, розташований в системі формування зображення, наносять дві маски 9 і 10, що не перекриваються. Одна з них розташовується з боку предметного пучка (предметна маска 10), а інша - з боку опорного пучка (опорна маска 9). Перекривають за допомогою екрана опорний пучок повністю і реєструють розподіл інтенсивності по перетину предметного пучка в області реєстратора. Розподіл інтенсивності матриці I одержують у вигляді матриці дійсних чисел I пр розміром n m , де n і m є характеристиками ij ПЗЗ-матриці. Перекривають повністю за допомогою екрану предметний пучок і реєструють розподіл інтенсивності у вигляді 55 оn ij по перетину опорного пучка в області реєстратора. Прибирають екрани і реєструють зображення контрольованого об'єкта в деф початковому стані (матриця I ij ) а потім в деформованому (матриця I ij ). Для обчислення фазового зсуву слід скористатися співвідношеннями 2 UA 105933 C2 I ij I пр on ij I ij 2 деф I ij I I пр on ij I ij пр on ij I ij 2 I cos ij ; пр on ij I ij (1) cos ij ij , де - мультиплікативний чинник, який описує вплив некогерентної складової і обчислюється шляхом аналізу отриманих величин [10]; ij - фаза, яка являє собою величину, що випадковим чином змінюється від пікселя до 5 пікселя і є проміжною величиною при обчисленнях; ij - різниця фаз, яка являє собою величину, пов'язану з переміщеннями об'єкта контролю між останніми експозиціями і є метою обчислень. деф Формули (1) справедливі в тому випадку, якщо до моменту отримання матриць I ij і I ij I і I не змінилися. Флуктуації лазерного випромінювання і зміна загального освітлення зони контролю та часу експонування матриць, приводять до зміни елементів цих матриць. Їх нові елементи при отриманні I позначені відповідно як I і I , а при отриманні I - відповідно I і I . Кориговані з урахуванням цих змін 10 оn ij пр ij елементи матриць ij оn1 ij деф ij пр1 ij оn2 ij пр2 ij формули (1) мають наступний вигляд: I ij I 15 пр1 on1 ij I ij 2 деф I ij I I пр1 on1 ij I ij cos ij ; пр2 on2 ij I ij 2 I пр2 on2 ij I ij cos ij ij , звідки можна обчислити різниці фаз за формулою ij arccos I ij I пр2 on2 ij I ij 2 I пр2 on2 ij I ij arccos I ij I пр1 on1 ij I ij 2 I пр1 on1 ij I ij Перехід від старих елементів матриць 20 . (2) I і I до нових можна здійснити на основі пр ij оn ij математичної моделі тих змін, які з ними відбулися. У загальному випадку зміни можуть бути представлені функціональними залежностями ƒ I ƒ I ƒ I ,p ,p ,..., p ; ,p ,p ,..., p ; ,p ,p ,..., p , I пр1 ƒ1 I пр,p1,p2,..., pk ; ij ij I пр2 ij k on 3 ij 1 2 k on I ij 2 30 2 on I ij 1 25 пр 2 ij 1 on 4 ij 1 2 k (3) де ƒ1 , ƒ 2 , ƒ 3 , ƒ 4 - відомі функції, які визначаються шляхом експериментальних досліджень; p1 , p 2 ,…, p k - наперед невідомі коригуючі коефіцієнти. Оскільки під час реєстрації світлові пучки частково перекриваються за допомогою масок, то на зображенні, яке фіксується матрицею реєстратора, будуть присутні три області. Позначимо літерою А ділянку матриці реєстратора, яка внаслідок застосування опорної маски реєструє лише інтенсивність предметного пучка, а літерою В - ділянку матриці реєстратора, яка внаслідок застосування предметної маски реєструє лише інтенсивність опорного пучка (див. фіг. 2). Для позначення цих вікон на зображенні об'єкта контролю після його навантаження використовуються літери С і D відповідно. Підсумовуючи квадрати відхилень передбачуваних елементів матриці від отриманих за всіма відміченими ділянками, одержимо 35 3 UA 105933 C2 2 J I ij ƒ1 I пр,p1,p2 ,...,pk ij A on I ij ƒ3 I ij ,p1,p2 ,...,pk 2 B , де I C деф ƒ2 ij I 2 пр ij ,p1, p 2 ,... , pk деф on I ij ƒ 4 I ij ,p1,p2 ,...,pk (4) 2 D - сума за точками ділянки Е, де Е приймає значення А, В, С і D. E 5 Диференціюючи величину J за коригуючими коефіцієнтами p1 , p 2 ,…, p k і прирівнюючи результат нулю, отримаємо систему алгебраїчних рівнянь, розв'язання якої дає значення коригуючих коефіцієнтів p1 , p 2 ,…, p k . Обчислені значення коефіцієнтів використовуються для знаходження за формулою (3) елементів матриць 10 I , I , I , I . Виходячи з пр1 ij оn1 ij пр2 ij оn2 ij отриманих внаслідок цього розрахунку величин, за формулою (2) обчислюють значення різниці фаз. Сама величина J при визначених таким чином значеннях коригуючих коефіцієнтів свідчить про ступінь відповідності використовуваної математичної моделі реальним вимірюванням і може бути використана для відбраковування результатів вимірювань шляхом порівняння із пороговим значенням. Найпростіша математична модель, яка відповідає пропорційній зміні інтенсивності освітлення матриці реєстратора, може бути представлена рівняннями: 15 I пр1 I пр p1 ; ij ij I пр2 I пр p2 ; ij ij (5) on on I ij 1 I ij p3 ; on on I ij 2 I ij p4 ; Використовуючи рівняння (5) для розрахунку J і використовуючи умову рівності нулю похідної, отримують наступні формули для визначення коригуючих коефіцієнтів p1 , p 2 , p 3 , p 4 . p1 I ij A p2 С A деф I ij p 3 I ij B p4 D I пр ; ij B деф I ij I пр ; ij С on I ij (6) ; on I ij D 20 Визначені за допомогою (6) значення p1 , p 2 , p 3 , p 4 використовують для розрахунку різниці фаз, що може бути знайдена наступним чином: ij arccos 25 30 on I ij p 2 I пр p 4 I ij ij on 2 p 2p 4 I пр I ij ij arccos on I ij p1 I пр p3 I ij ij on 2 p1 p3 I пр1 I ij 1 ij . Джерела інформації: 1. Карпюк Б.В., Солодкий Ю.Н. Анализ погрешностей измерения фазы интерферометром с управляемым фазовым сдвигом // Автометрия. - 1992. - № 6. - С. 16-21. 2. Ильиных С.П., Гужов В.И. Обобщенный алгоритм расшифровки интерферограмм с пошаговым сдвигом // Автометрия. - 2002. - Т. 38, № 3. - С. 123-126. 3. Гужов В.И. Практические аспекты измерения фазы в интерферометрии // Автометрия. 1995. -№ 5. - С. 25-31. 4. Гуров И.П. Компьютерная обработка интерференционных сигналов на основе алгоритма управляемого фазового сдвига // Оптический журнал. 1998. N10. С. 38-42. 4 UA 105933 C2 11 5 10 15 5. Патент України 93335 МПК G01В9/021 Імерсійний метод отримання топограм поверхонь дифузно розсіюючих об'єктів / Сминтина В.А., Тюрин О.В., Попов А.Ю. та ін. - № а201006137, Заявлено 20.05.2010; Опубл. 25.01.2011 // Бюл. № 2. - 2011. 6 6. US Patent 7274467 B1 Int.Cl. G01B11/02 Phase shifting interferometric method, interferometer apparatus and method of manufacturing an optical element / Bernd Doerband, Stefan Schulte. - Appl. No. 11/027989. Filed: 04.01.2005. Date of Patent: 25.09.2007. 6 7. US Patent 5473434 Int.Cl. G01B9/02 Phase shifting interferometer and method for surface topography measurement / Peter de Groot. - Appl. No. 242789. Filed: 16.05.1994. Date of Patent: 05.12.1995. 6 8. US Patent 7119910 B1 Int.Cl. G01B11/02 Phase shifting wavefront interference method / Uve Schellhorn. - Appl. No. 10/697239. Filed: 31.10.2003. Date of Patent: 10.10.2006. 6 9. US Patent 7379188 B2 Int.Cl. G01В9/02 Phase shift interferometer / Maarten Jansen. - Appl. No. 11/487430. Filed: 17.06.2007. Date of Patent: 27.05.2008. 6 10. US Patent 7280187 B1 Int.Cl. G01B9/02 Method for resolving phase in electronic speckle interferometry / Sanichiro Yoshida. - Appl. No. 11/248856. Filed: 12.10.2005. Date of Patent: 09.10.2007. ФОРМУЛА ВИНАХОДУ 20 25 30 Спосіб визначення різниці фаз, який полягає в тому, що промінь від джерела когерентного випромінювання перетворюють на два пучки, за допомогою оптичної системи формують зображення контрольованого об'єкта на матриці цифрового реєстратора, підключеного до пристрою зберігання і обробки даних, реєструють послідовно за допомогою матриці розподіл інтенсивності першого пучка, розподіл інтенсивності другою пучка, розподіл інтенсивності при одночасному використанні першого і другого пучків для початкового і зміненого стану об'єкта контролю, на основі даних вимірювань інтенсивностей для кожного елемента матриці реєстратора розраховують значення фаз і різниць фаз, відповідних різним станам об'єкта, який відрізняється тим, що в процесі послідовної реєстрації зображень за допомогою масок частково перекривають кожний з пучків так, щоб області перекриття першого і другого пучків відповідали різним ділянкам матриці цифрового реєстратора, порівнюють інтенсивності для елементів матриці реєстратора, що знаходяться в області кожної з масок, на зображеннях, зареєстрованих з одним пучком, і зображеннях, зареєстрованих з двома пучками, і враховують зміну інтенсивності для даних ділянок при розрахунку фаз. 5 UA 105933 C2 Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюRozhkovskyi Volodymyr Faustovych, Kyinn Natalia Oleksandrivna, Kudrevatykh Oleksandr Tykhonovych
Автори російськоюРожковский Владимир Фаустович, Куинн Наталья Александровна, Кудреватых Александр Тихонович
МПК / Мітки
МПК: G01B 9/021
Мітки: фаз, різниці, визначення, спосіб
Код посилання
<a href="https://ua.patents.su/8-105933-sposib-viznachennya-riznici-faz.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення різниці фаз</a>
Спосіб визначення різниці фаз
Номер патенту: 72975
Опубліковано: 10.09.2012
Автори: Рожковський Володимир Фаустович, Кудрєватих Олександр Тихонович, Куінн Наталія Олександрівна
МПК: G01B 9/021
Мітки: визначення, різниці, фаз, спосіб
Формула / Реферат:
Спосіб визначення різниці фаз, який полягає в тому, що промінь від джерела когерентного випромінювання перетворюють на два пучки, за допомогою оптичної системи формують зображення контрольованого об'єкта на матриці цифрового реєстратора, підключеного до пристрою зберігання і обробки даних, реєструють послідовно за допомогою матриці розподіл інтенсивності першого пучка, розподіл інтенсивності другого пучка, розподіл інтенсивності при...
Спосіб визначення величини функціональної різниці довжини нижніх кінцівок і пристрій для його здійснення
Номер патенту: 6715
Опубліковано: 29.12.1994
Автори: Проценко Володимир Миколайович, Туманський Валерій Олексійович, Сколібог Сергій Олександрович, Віннік Генадій Владиславович
МПК: A61B 5/103
Мітки: величини, довжини, кінцівок, спосіб, функціонально, здійснення, нижніх, пристрій, визначення, різниці
Формула / Реферат:
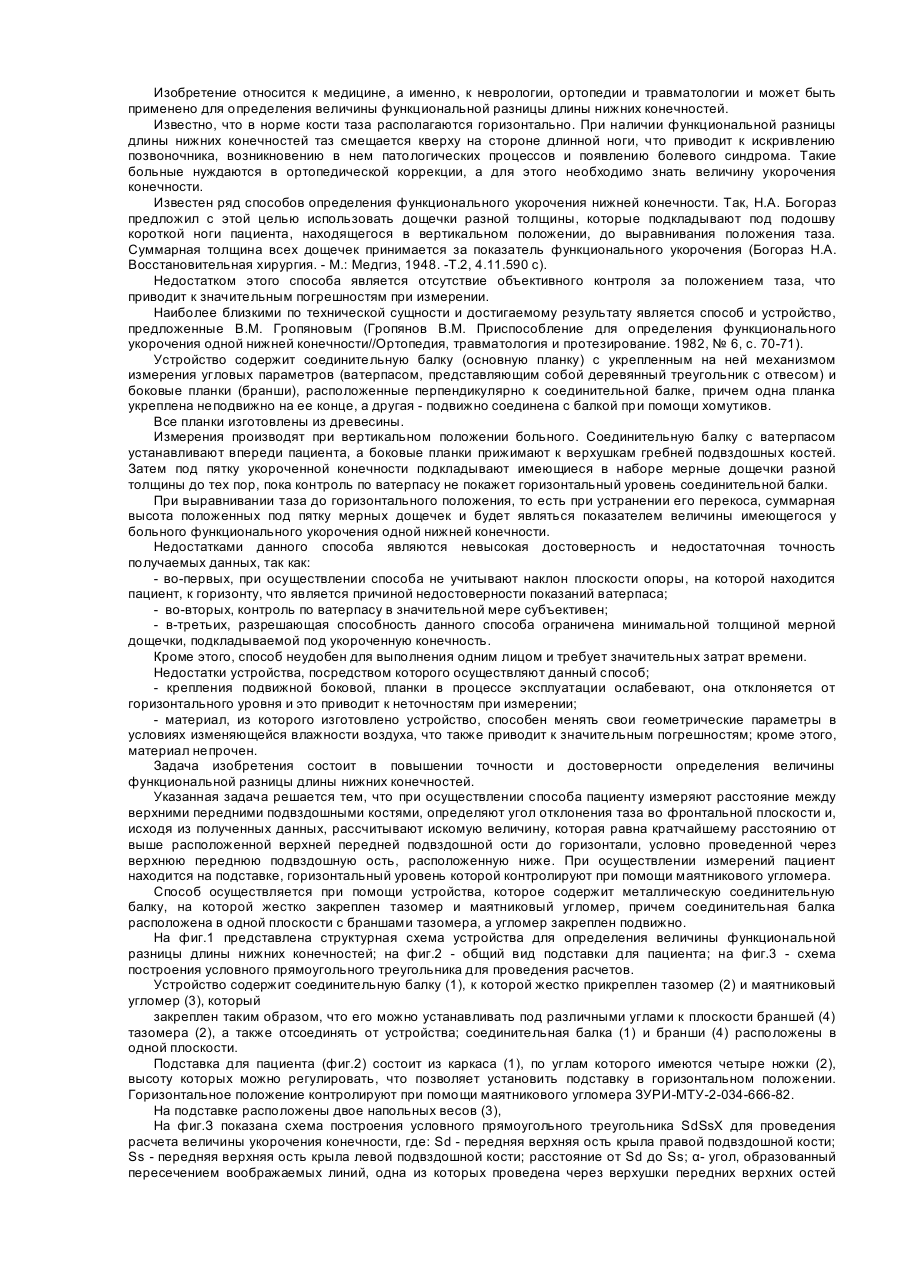
1. Способ определения величины функциональной разницы длины нижних конечностей путем помещения пациента на горизонтальную поверхность и антропометрии, отличающийся тем, что измеряют расстояние d между верхними передними подвздощными остями, угол отклонения таза а во фронтальной плоскости и по формуле h = d·sinа рассчитывают искомую величину, соответствующую кратчайшему расстоянию Ь от выше расположенной верхней передней...
Спосіб визначення наявності різниці діаметрів кругів котіння суміжних коліс дефектного візка залізничного вагона

Номер патенту: 14252
Опубліковано: 15.05.2006
Автори: Барденштейн Ігор Іонович, Парфьонов Володимир Іванович
МПК: B61L 25/00
Мітки: діаметрів, кругів, наявності, візка, визначення, дефектного, коліс, вагона, залізничного, котіння, різниці, суміжних, спосіб
Формула / Реферат:
Спосіб визначення наявності різниці діаметрів кругів котіння суміжних коліс дефектного візка залізничного вагона, що полягає в фіксації проїзду коліс за допомогою датчиків, встановлених з обох сторін на контрольній ділянці залізничної колії, який відрізняється тим, що наявність різниці діаметрів кругів котіння суміжних коліс визначають по появі різниці в сумарній електрорухомій силі, наведеній колесами в електромагнітних датчиках правої і...
Поляризаційно-оптичний пристрій для визначення індукованої зміни різниці ходу в оптичних матеріалах

Номер патенту: 39218
Опубліковано: 10.02.2009
Автори: Юркевич Олег Володимирович, Мицик Богдан Григорович, Кость Ярослав Павлович, Андрущак Анатолій Степанович
МПК: G01N 21/45
Мітки: визначення, ходу, поляризаційно-оптичний, індукованої, пристрій, різниці, зміни, матеріалах, оптичних
Формула / Реферат:
1. Поляризаційно-оптичний пристрій для визначення індукованої зміни різниці ходу в оптичних матеріалах, що містить джерело лінійно поляризованого випромінювання, на осі променя якого розміщені досліджуваний зразок і аналізатор, встановлені відповідно в діагональне і схрещене положення до площини поляризації цього променя, та фотоприймач, електрично з'єднаний з реєструючим пристроєм, який відрізняється тим, що він додатково оснащений...
Пристрій для визначення різниці механічних напруг у феромагнітних конструкціях
Номер патенту: 83513
Опубліковано: 10.09.2013
Автори: Біхдрікер Аркадій Семенович, Смірний Михайло Федорович
МПК: C01G 7/00
Мітки: визначення, напруг, феромагнітних, механічних, різниці, конструкціях, пристрій
Формула / Реферат:
Пристрій для визначення різниці механічних напруг у феромагнітних конструкціях, що містить П-подібну магнітну головку запису, обмотки збудження, джерело живлення постійного струму, однощілинну та дві двощілинні потокочутливі головки відтворення, сполучені зі входом блока вимірювання та сигналізації, згладжуючий фільтр, реле часу з контактною групою та двома регулювальними ланцюгами, блок вимірювання та сигналізації, з'єднаний з парою...
Попередній патент: Вітроенергетична установка
Наступний патент: Клеєні листові сталеві анкери для монолітних залізобетонних плит зі сталевим профільованим настилом
Випадковий патент: Каскадний підсилювач