Пристрій для захоплення вантажу
Номер патенту: 106051
Опубліковано: 11.04.2016
Автори: Андрєєв Леонід Олександрович, Федоренко Дмитро Миколайович, Хмельов Віталій Васильович, Березін Ілля Віталійович, Мосина Валентина Ігнатівна, Яблоновський Іван Михайлович
Формула / Реферат
1. Пристрій для захоплення вантажу, що містить вертикальне вушко з фігурним отвором для взаємодії з вантажопідйомним штирем вантажу і фіксатор, причому фігурний отвір виконаний у вигляді верхнього і нижнього отворів, з'єднаних вертикальним прорізом, який відрізняється тим, що фіксатор виконаний у вигляді двох Z-подібних обмежувачів, котрі розміщені симетрично відносно поздовжньої осі вертикального вушка, закріплені на вертикальному вушку за допомогою горизонтальних осей з можливістю повороту у вертикальній площині, паралельній площині вертикального вушка, кінці їх верхніх поличок орієнтовані назустріч один одному, а на кінцях їх нижніх поличок виконані вертикальні виступи у вигляді рукояток, при цьому горизонтальні осі змонтовані на верхніх частинах Z-подібних обмежувачів і розташовані між верхнім і нижнім отворами.
2. Пристрій за п. 1, який відрізняється тим, що відстань між кінцями верхніх поличок Z-подібних обмежувачів складає 2-5 мм у робочому і неробочому положеннях, відстань між стінками Z-подібних обмежувачів складає 1,05-1,15 від діаметра вантажопідйомного штиря у робочому положенні, а відстань між центром кожної горизонтальної осі і відповідним кінцем верхньої полички Z-подібного обмежувача складає 0,85-0,95 від відстані між центром горизонтальної осі і зовнішньою поверхнею вантажопідйомного штиря.
Текст
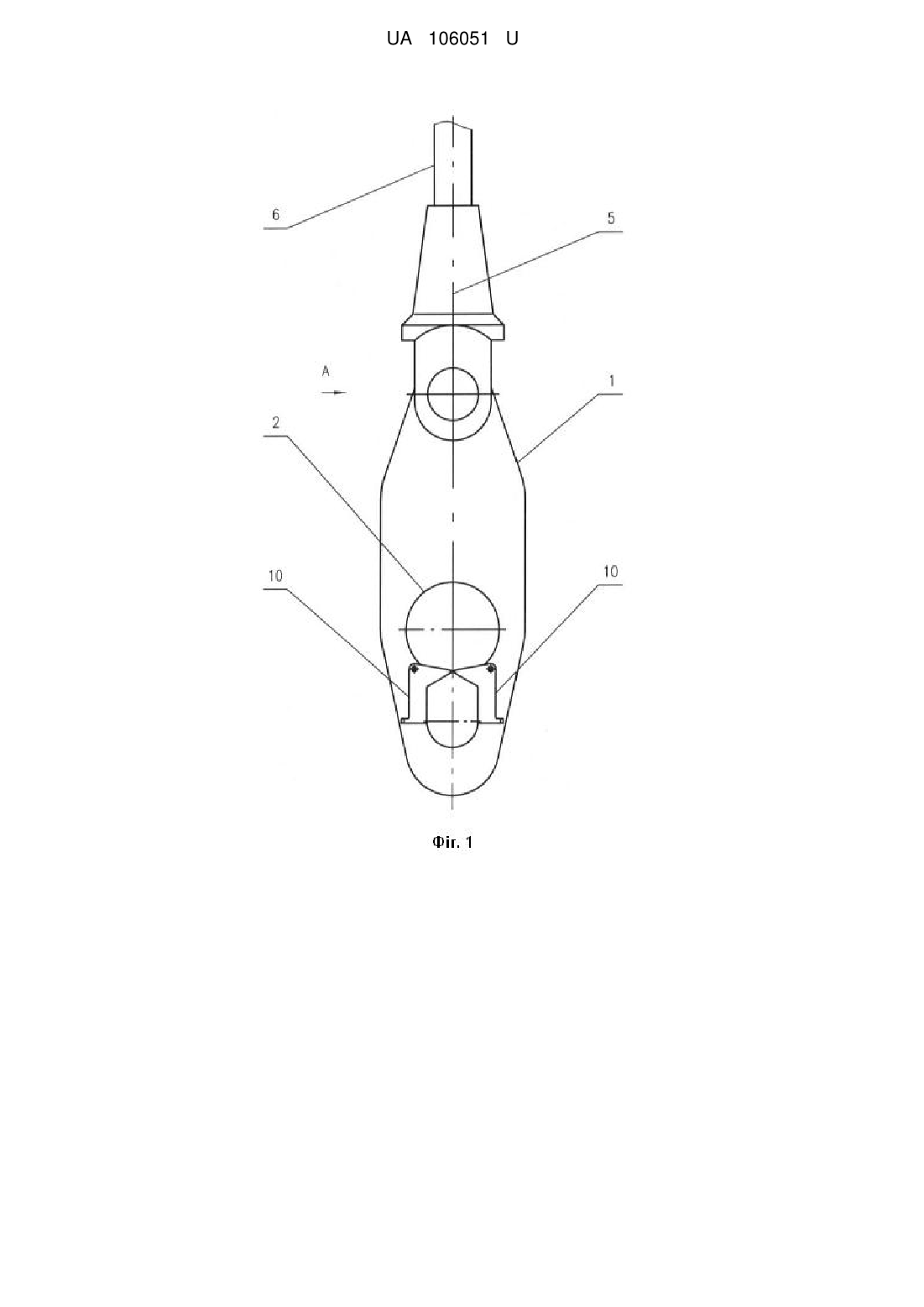
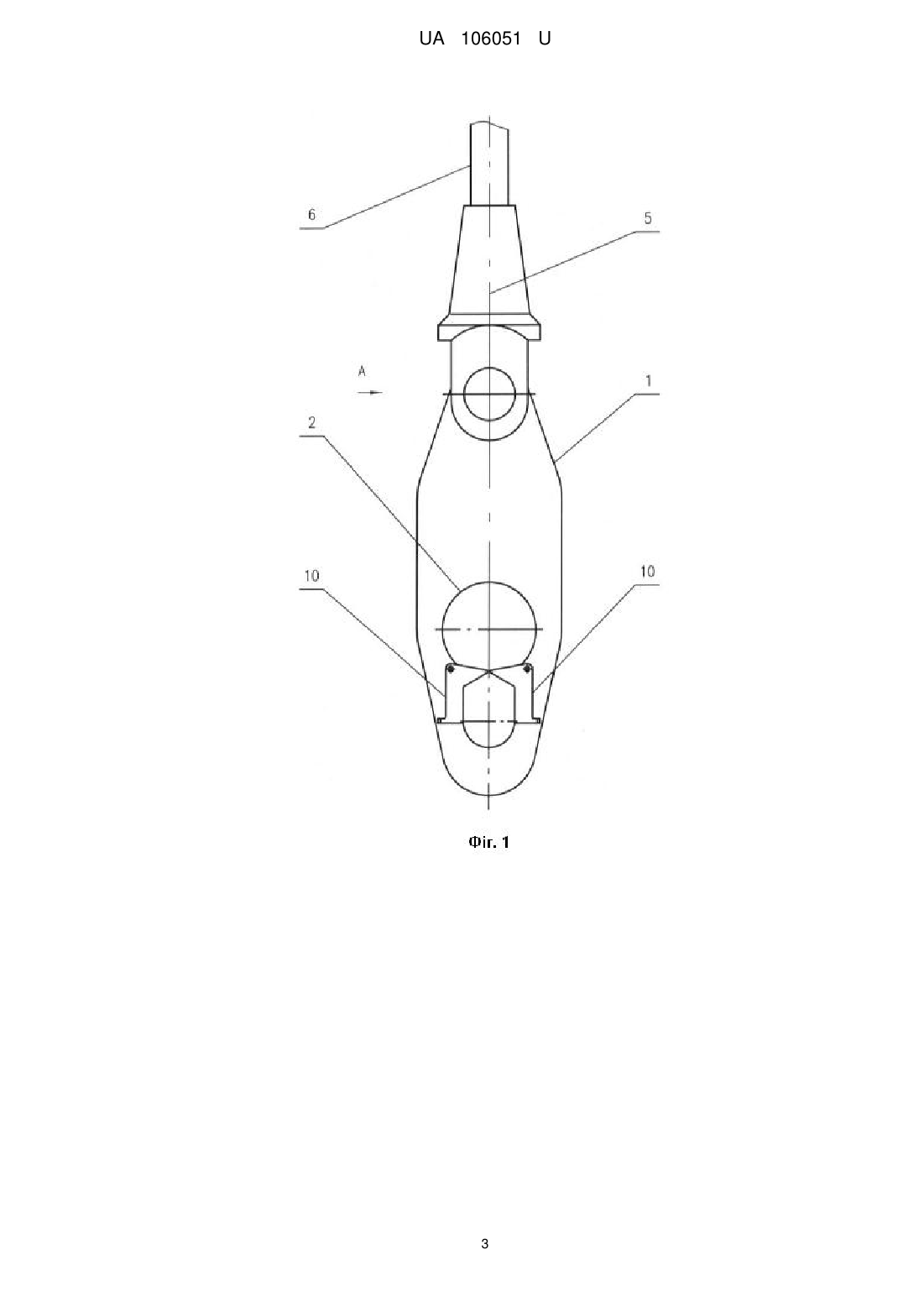
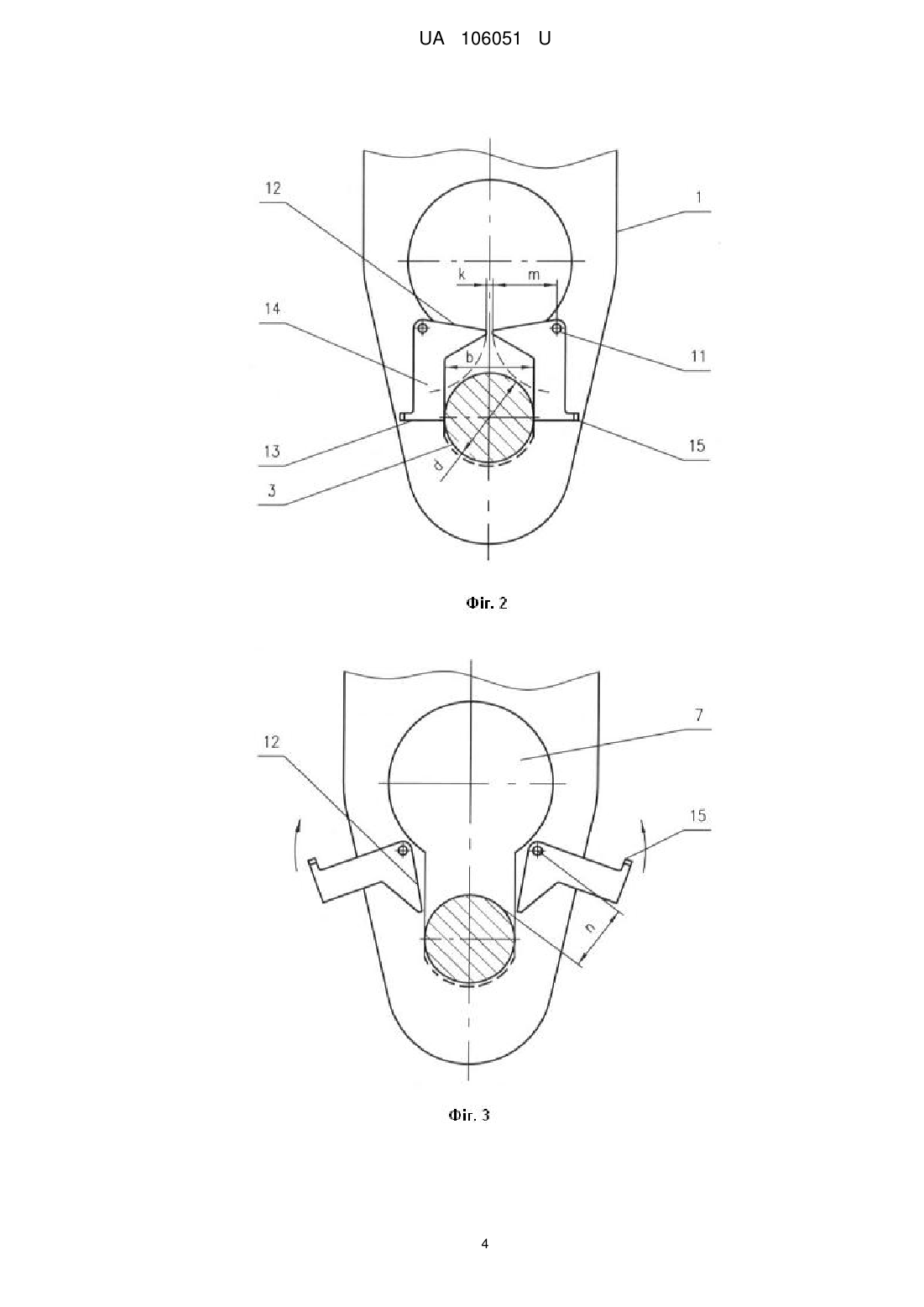
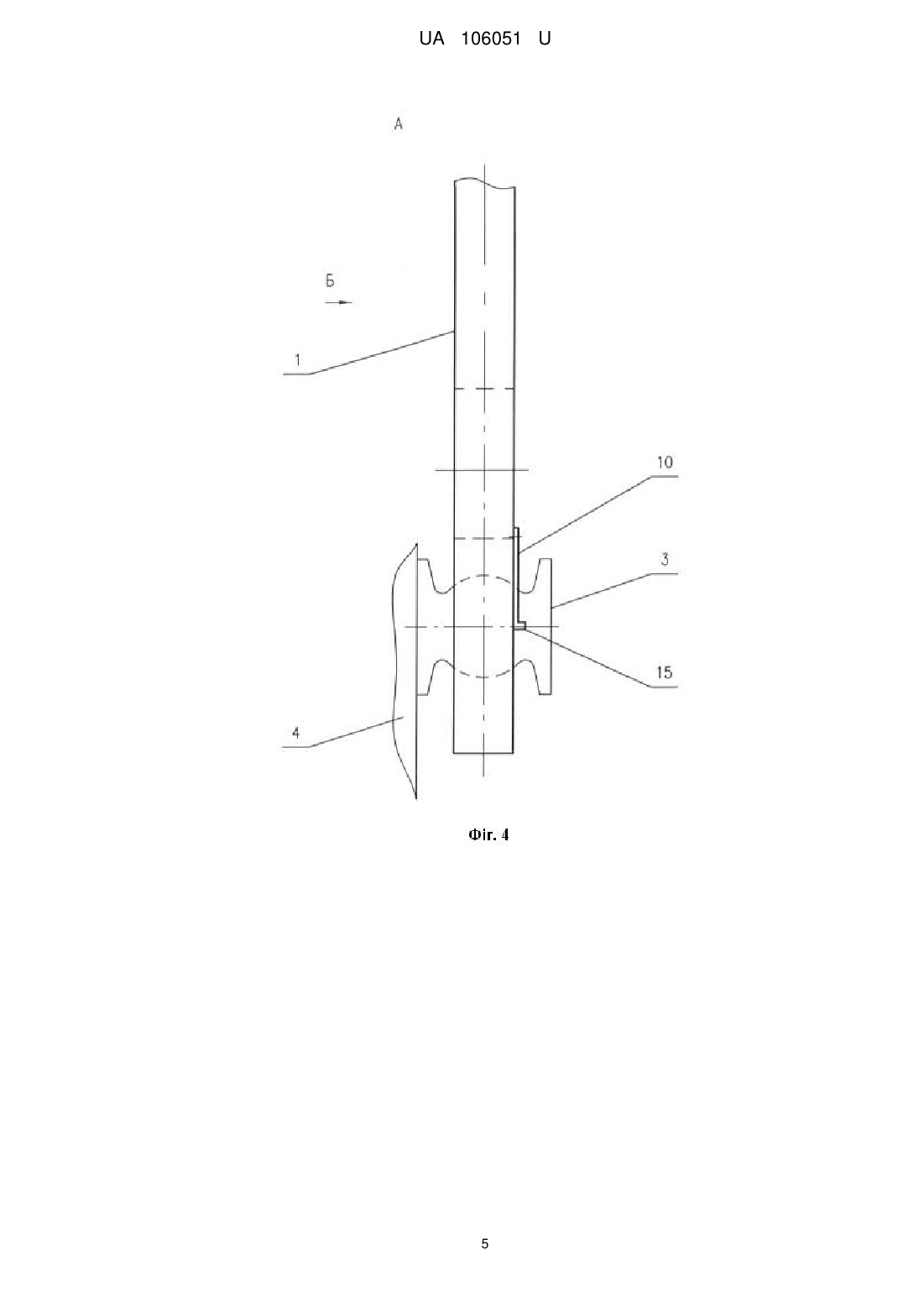
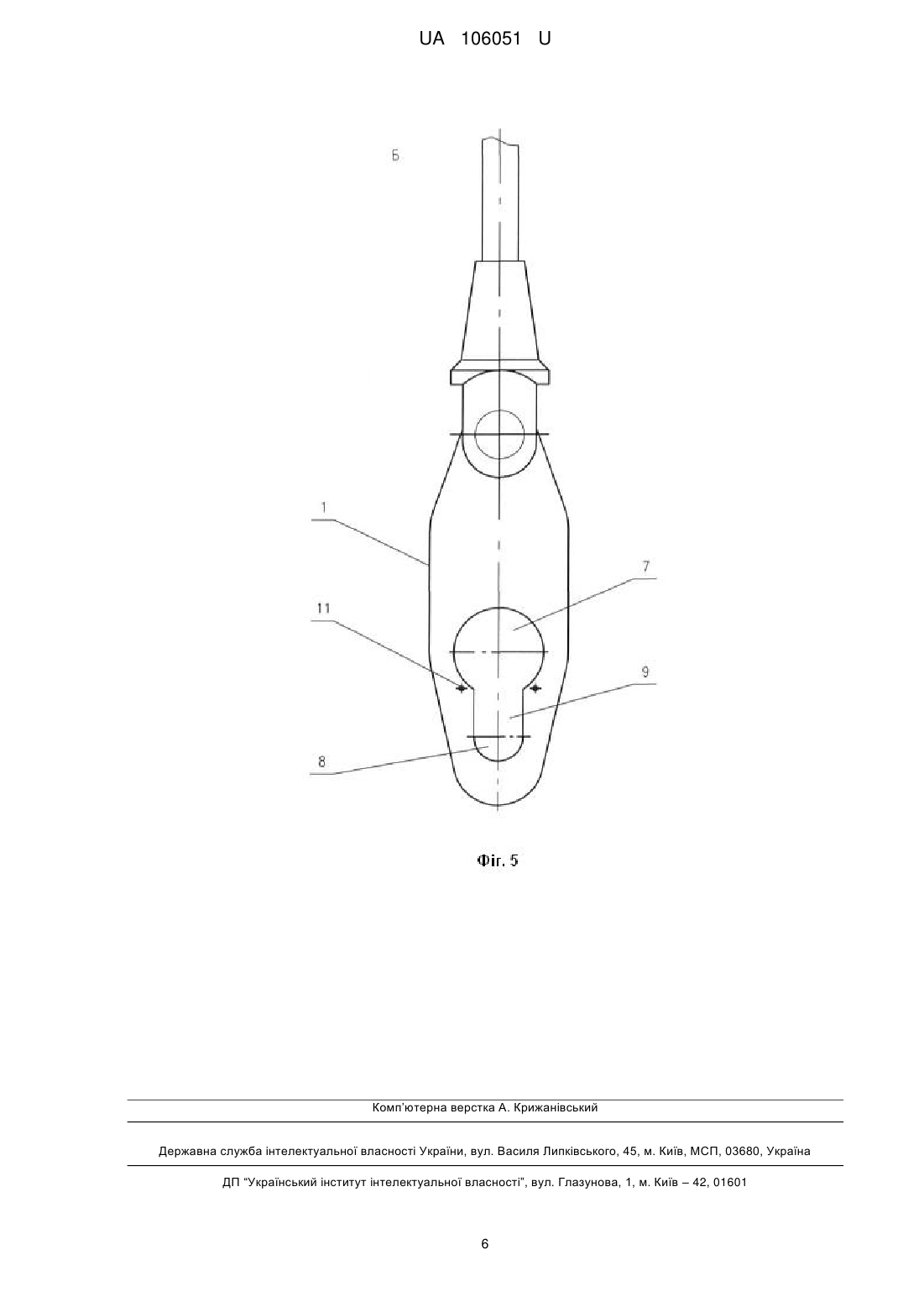
Реферат: Пристрій для захоплення вантажу містить вертикальне вушко з фігурним отвором для взаємодії з вантажопідйомним штирем вантажу і фіксатор. Фігурний отвір виконаний у вигляді верхнього і нижнього отворів, з'єднаних вертикальним прорізом. Фіксатор виконаний у вигляді двох Zподібних обмежувачів, котрі розміщені симетрично відносно поздовжньої осі вертикального вушка, закріплені на вертикальному вушку за допомогою горизонтальних осей з можливістю повороту у вертикальній площині, паралельній площині вертикального вушка. Кінці їх верхніх поличок орієнтовані назустріч один одному, а на кінцях їх нижніх поличок виконані вертикальні виступи у вигляді рукояток. При цьому горизонтальні осі змонтовані на верхніх частинах Zподібних обмежувачів і розташовані між верхнім і нижнім отворами. UA 106051 U (12) UA 106051 U UA 106051 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до вантажопідйомного обладнання, а більш конкретно - до пристроїв для захоплення вантажів, і може використовуватися для перевантаження вантажів, які оснащені штирями для захоплення. Відомим є такелажний вузол, що містить горизонтальну цапфу (вантажопідйомний штир) для взаємодії з вантажопідйомною тягою (вертикальним вушком) з фігурним отвором і фіксатор. Фіксатор містить болт, рухому втулку, підпружинені фіксатори (див. патент РФ № 2.245.835, МПК В66С 1/66, 2003 р.). Недоліком відомого вузла є його низькі експлуатаційні якості через його значну складність і велику кількість елементів. Найближчим до запропонованого по технічному рішенню є вибраний як прототип пристрій для захоплення вантажу за патентом України № 16666u, МПК В66С 1/62, 2006 р.). Цей пристрій містить вертикальне вушко з фігурним отвором для взаємодії з вантажопідйомним штирем вантажу і фіксатор, причому фігурний отвір виконаний у вигляді верхнього і нижнього отворів, з'єднаних вертикальним прорізом. Фіксатор складається з вертикальних напрямних, повзуна і гвинтового притискача. Недоліком відомого пристрою для захоплення вантажу є його невисокі експлуатаційні якості через складність конструкції з гвинтовим притискачем. В основу корисної моделі поставлена задача створення удосконаленої конструкції пристрою для захоплення вантажу, яка б дозволила забезпечити підвищення його експлуатаційних якостей шляхом уведення в нього нових елементів і технічних рішень, таких як: - фіксатор виконується у вигляді двох Z-подібних обмежувачів, котрі розміщуються симетрично відносно поздовжньої осі вертикального вушка, закріплюються на вертикальному вушку за допомогою горизонтальних осей з можливістю повороту у вертикальній площині, паралельній площині вертикального вушка, кінці їх верхніх поличок орієнтуються назустріч один одному, а на кінцях їх нижніх поличок виконуються вертикальні виступи у вигляді рукояток, при цьому горизонтальні осі монтуються на верхніх частинах Z-подібних обмежувачів і розташовуються між верхнім і нижнім отворами, що дозволяє забезпечити надійну фіксацію вантажопідйомного штиря з мінімальною кількістю простих елементів; - відстань між кінцями верхніх поличок Z-подібних обмежувачів складає 2-5 мм у робочому і неробочому положеннях, відстань між стінками Z-подібних обмежувачів складає 1,05-1,15 від діаметра вантажопідйомного штиря у робочому положенні, а відстань між центром кожної горизонтальної осі і відповідним кінцем верхньої полички Z-подібного обмежувача складає 0,850,95 від відстані між центром горизонтальної осі і зовнішньою поверхнею вантажопідйомного штиря, що дозволяє забезпечити оптимальне компонування елементів пристрою. Поставлена задача вирішується таким чином, що у запропонованому пристрої для захоплення вантажу, який містить вертикальне вушко з фігурним отвором для взаємодії з вантажопідйомним штирем вантажу і фіксатор, причому фігурний отвір виконаний у вигляді верхнього і нижнього отворів, з'єднаних вертикальним прорізом, згідно з корисною моделлю, фіксатор виконаний у вигляді двох Z-подібних обмежувачів, котрі розміщені симетрично відносно поздовжній осі вертикального вушка, закріплені на вертикальному вушку за допомогою горизонтальних осей з можливістю повороту у вертикальній площині, паралельній площині вертикального вушка, кінці їх верхніх поличок орієнтовані назустріч один одному, а на кінцях їх нижніх поличок виконані вертикальні виступи у вигляді рукояток, при цьому горизонтальні осі змонтовані на верхніх частинах Z-подібних обмежувачів і розташовані між верхнім і нижнім отворами. Відстань між кінцями верхніх поличок Z-подібних обмежувачів складає 2-5 мм у робочому і неробочому положеннях, відстань між стінками Z-подібних обмежувачів складає 1,05-1,15 від діаметра вантажопідйомного штиря у робочому положенні, а відстань між центром кожної горизонтальної осі і відповідним кінцем верхньої полички Z-подібного обмежувача складає 0,85-0,95 від відстані між центром горизонтальної осі і зовнішньою поверхнею вантажопідйомного штиря. Для пояснення конструкції пристрою і його роботи додаються креслення і його детальний опис. На кресленнях зображено: - на фіг. 1 - загальний вигляд пристрою у неробочому положенні; - на фіг. 2 - загальний вигляд пристрою у робочому положенні; - на фіг. 3 - загальний вигляд пристрою під час його встановлення; - на фіг. 4 - вигляд А на фіг. 1 (вигляд вушка збоку); - на фіг. 5 - вигляд Б на фіг. 4 (вигляд зворотної сторони вушка). Запропонований пристрій складається з вертикального вушка 1 з фігурним отвором 2 для встановлення на вантажопідйомний штир 3 вантажу 4 і фіксатора (фіг. 1). Вертикальне вушко 1 1 UA 106051 U 5 10 15 20 25 30 35 має поздовжню вісь 5 і з'єднане зі стропом 6 траверси. Фігурний отвір складається з верхнього 7 і нижнього 8 отворів, з'єднаних вертикальним прорізом 9 (фіг. 5). Фіксатор складається з двох Z-подібних обмежувачів 10, розташованих симетрично відносно поздовжній осі 5 і закріплених на вертикальному вушку 1 за допомогою горизонтальних осей 11 (фіг. 1, 4). Z-подібні обмежувачі 10 мають верхні 12 і нижні 13 полички, з'єднані стінками 14 (фіг. 2, 3). На нижніх поличках 13 виконані вертикальні виступи у вигляді рукояток 15. На кресленнях позначено: - b - відстань між стінками Z-подібних обмежувачів 10 у робочому положенні, b=(1,05-1,15)d; - d - діаметр вантажопідйомного штиря; - k - відстань між кінцями верхніх поличок 12 Z-подібних обмежувачів 10 у робочому і неробочому положеннях, k=2-5 мм; - m - відстань між центром кожної горизонтальної осі 11 і відповідним кінцем верхньої полички 12 Z-подібного обмежувача 10, m=(0,85-0,95)n; - n - відстань між центром кожної горизонтальної осі 11 і зовнішньою поверхнею вантажопідйомного штиря 1. Робота запропонованого пристрою для захоплення вантажу здійснюється наступним чином. Перед застосуванням вертикальне вушко 1 знаходиться у неробочому положенні (фіг. 1), при цьому стінки 14 Z-подібних обмежувачів 10 знаходяться вертикально. Далі Z-подібні обмежувачі 10 розводять у протилежні сторони за рукоятки 15 (на фіг. 3 зображено стрілками), вертикальне вушко 1 надягають на вантажопідйомний штир 3 верхнім отвором 7 і вушко 1 піднімають вгору краном до контакту його сферичної поверхні зі штирем 3. Відпускають рукоятки 15 і Z-подібні обмежувачі 10 під дією ваги повертаються і займають вертикальне (робоче) положення, при цьому траєкторія кінців верхніх поличок 12 зображена пунктирною лінією на фіг. 2, тобто вільну траєкторію забезпечує висота вертикального прорізу 9 (на фіг. 5 вушко 1 і обмежувачі 10 не зображені). У випадку опускання вертикального вушка 1 вантажопідйомний штир 3 буде взаємодіяти з нижніми поверхнями верхніх поличок 12, але обертання Z-подібних обмежувачів 10 виключається через контакт стінок 14 з вантажопідйомним штирем 3, тобто вушко 1 зафіксовано на штирі 3. Для зняття вертикального вушка 1 виконують наступні операції: відводять Z-подібні обмежувачі 10 у протилежні сторони за рукоятки 15, опускають краном вушко 1 і знімають його зі штиря 3 через верхній отвір 7, при цьому Z-подібні обмежувачі 10 повертаються у неробоче положення. Запропонований пристрій може застосовуватися на наступних траверсах: - поперечній - за патентом РФ № 2.374.164, МПК В66С 1/68, 2008 р.; - поздовжній - за патентом РФ № 2.376.237, МПК В66С 1/68, 2008 р. Вказані траверси слугують для перевантаження ракетних блоків у монтажновипробувальному корпусі. Таким чином, запропонований пристрій для захоплення вантажу, який має просту і надійну конструкцію, забезпечує низьку трудомісткість процесу встановлення (зняття) його на вантаж. 40 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 55 1. Пристрій для захоплення вантажу, що містить вертикальне вушко з фігурним отвором для взаємодії з вантажопідйомним штирем вантажу і фіксатор, причому фігурний отвір виконаний у вигляді верхнього і нижнього отворів, з'єднаних вертикальним прорізом, який відрізняється тим, що фіксатор виконаний у вигляді двох Z-подібних обмежувачів, котрі розміщені симетрично відносно поздовжньої осі вертикального вушка, закріплені на вертикальному вушку за допомогою горизонтальних осей з можливістю повороту у вертикальній площині, паралельній площині вертикального вушка, кінці їх верхніх поличок орієнтовані назустріч один одному, а на кінцях їх нижніх поличок виконані вертикальні виступи у вигляді рукояток, при цьому горизонтальні осі змонтовані на верхніх частинах Z-подібних обмежувачів і розташовані між верхнім і нижнім отворами. 2. Пристрій за п. 1, який відрізняється тим, що відстань між кінцями верхніх поличок Z-подібних обмежувачів складає 2-5 мм у робочому і неробочому положеннях, відстань між стінками Zподібних обмежувачів складає 1,05-1,15 від діаметра вантажопідйомного штиря у робочому положенні, а відстань між центром кожної горизонтальної осі і відповідним кінцем верхньої полички Z-подібного обмежувача складає 0,85-0,95 від відстані між центром горизонтальної осі і зовнішньою поверхнею вантажопідйомного штиря. 2 UA 106051 U 3 UA 106051 U 4 UA 106051 U 5 UA 106051 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for gripping load
Автори англійськоюAndrieev Leonid Oleksandrovych, Berezin Illia Vitaliiovych, Mosyna Valentyna Ihnativna, Fedorenko Dmytro Mykolaiovych, Khmeliov Vitalii Vasyliovych, Yablonovskyi Ivan Mykhailovych
Назва патенту російськоюУстройство для захвата груза
Автори російськоюАндреев Леонид Александрович, Березин Илья Витальевич, Мосина Валентина Игнатьевна, Федоренко Дмитрий Николаевич, Хмелев Виталий Васильевич, Яблоновский Иван Михайлович
МПК / Мітки
МПК: B66C 1/62
Мітки: пристрій, захоплення, вантажу
Код посилання
<a href="https://ua.patents.su/8-106051-pristrijj-dlya-zakhoplennya-vantazhu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для захоплення вантажу</a>
Пристрій для захоплювання вантажу
Номер патенту: 16666
Опубліковано: 15.08.2006
Автори: Мокін Олександр Васильович, Абросимов Микола Анатолійович, Яцуба Юрко Іванович, Онищенко Михайло Антонович, Кондратенко Федір Іванович, Мокін Андрій Олександрович
МПК: B66C 1/62
Мітки: вантажу, захоплювання, пристрій
Формула / Реферат:
1. Пристрій для захоплювання вантажу, що містить вертикальне вушко з отвором для взаємодії з вантажопідйомним штирем і фіксатор, який відрізняється тим, що фіксатор виконаний у вигляді встановленого у вертикальній напрямній з можливістю переміщення повзуном, який фіксується за допомогою притискача, наприклад гвинтового типу, і взаємодіє нижнім торцем з бічною поверхнею вантажопідйомного штиря.2. Пристрій для захоплювання вантажу за п....
Пристрій для захвату вантажу
Номер патенту: 53342
Опубліковано: 15.01.2003
Автори: Магомедов Магомед Гусейнович, ІВЧЕНКО ЄЛЕНА ІВАНІВНА, Капінус Микола Данилович, Мокін Андрій Олександрович, Мокін Олександр Васильович, Сидоренко Віктор Ігнатович
МПК: B66C 1/62
Мітки: пристрій, вантажу, захвату
Формула / Реферат:
1. Пристрій для захвату вантажу, що містить порожнистий циліндричний корпус з вушком і втулку з фіксатором для вантажу, який відрізняється тим, що в ньому вушко закріплено на корпусі за допомогою осі з можливістю повороту у його поздовжній площині.2. Пристрій для захвату вантажу за п. 1, який відрізняється тим, що він споряджений Г-подібним важелем, один кінець якого шарнірно закріплений на втулці, а на другому кінці важеля виконаний...
Пристрій для захвату вантажу
Номер патенту: 88300
Опубліковано: 11.03.2014
Автори: Мокін Олександр Васильович, Євшун Валерій Леонідович, Жарков Микола Миколайович, Самойленко Ігор Дмитрович, Мокін Андрій Олександрович, Непийвода Василь Васильович
Мітки: вантажу, пристрій, захвату
Формула / Реферат:
Пристрій для захвату вантажу, що містить вертикальне вушко з фігурним отвором для взаємодії з вантажопідйомним штирем, фіксатор, виконаний у вигляді кронштейна з запобіжною чекою, котра взаємодіє з вантажопідйомним штирем у робочому положенні, і фігурні пази, який відрізняється тим, що в ньому запобіжна чека виконана з двох поздовжніх паралельних частин, з'єднаних поперечною частиною і має Z-подібну форму, кронштейн виконаний з вертикальним...
Пристрій для захвату вантажу з вантажопідйомними штирями
Номер патенту: 21018
Опубліковано: 15.02.2007
Автори: Федоров Віктор Михайлович, Мокін Олександр Васильович, Мокін Андрій Олександрович, Пелевін Олександр Анатолійович, Кучма Леонід Данилович, Дивляш Володимир Миколайович
МПК: B66C 1/00
Мітки: вантажу, пристрій, вантажопідйомними, захвату, штирями
Формула / Реферат:
1. Пристрій для захвату вантажу з вантажопідйомними штирями, що містить порожнистий циліндричний корпус з прикріпленим до нього вушком для з'єднання з крюком крана і співвісну втулку з фіксатором у вигляді штифта, який відрізняється тим, що він оснащений приводом, виконаним, наприклад, у вигляді черв'ячного редуктора, змонтованого на порожнистому циліндричному корпусі, при цьому на валу черв'яка змонтований маховик з рукояткою, а вал...
Пристрій для захвату вантажу
Номер патенту: 97303
Опубліковано: 10.03.2015
Автори: Жариков Ігор Миколайович, Залазаєв Володимир Олександрович, Мокін Андрій Олександрович, Мокін Олександр Васильович, Таран Олена Анатоліївна, Паранько Людмила Валентинівна
МПК: B66C 1/62
Мітки: вантажу, захвату, пристрій
Формула / Реферат:
1. Пристрій для захвату вантажу, що містить скобу, котра взаємодіє з тросом і має паралельні вертикальні консолі, виконані у вигляді дисків з центральним отвором, пружинний фіксатор, циліндричний корпус котрого змонтований на одному з дисків, а шток пружинного фіксатора взаємодіє з центральним отвором і вушком вантажу, та вибивний фіксатор, причому вільний кінець штока контактує з вибивним фіксатором у неробочому положенні, а на вільному...
Попередній патент: Спосіб передпроменевої підготовки хворого на рак передміхурової залози
Наступний патент: Пристрій для підключення живлення у плівкових системах “тепла підлога”
Випадковий патент: Спосіб керування якістю гігієни порожнини рота