Датчик кутової швидкості
Номер патенту: 8382
Опубліковано: 15.08.2005
Автори: Джулгаков Віталій Георгійович, Субота Анатолій Максимович, Щадних Катерина Олександрівна, Прийма Віктор Володимирович

Формула / Реферат
Датчик кутової швидкості, що містить гіровузол, датчики кута, моменту і підсилювач зворотного зв'язку, який відрізняється тим, що в нього додатково введені два підсилювачі, аналого-цифровий та цифро-аналоговий перетворювачі, пристрій вибору та збереження інформації, чотири ключі, реверсивний лічильник, блоки керування і синхронізації, і причому вихід датчика кута через перший підсилювач, аналого-цифровий перетворювач, пристрій вибору та збереження інформації, цифро-аналоговий перетворювач та другий підсилювач з'єднаний з входом датчика моменту, вихід пристрою вибору та збереження інформації додатково з'єднаний з входами першого, другого, третього та четвертого ключів, виходи перших ключів з'єднані з позитивним входом реверсивного лічильника, перший вхід якого з'єднаний з п'ятим виходом блока керування, а другий вхід з'єднаний з другим виходом блока синхронізації, перший вихід якого з'єднаний з шостим входом блока керування, перший, другий та третій виходи якого відповідно з'єднані з другими входами третіх і четвертих ключів, пристроєм вибору та збереження інформації, а також з першими і другими ключами аналого-цифрового перетворювача, а знаковий вихід аналого-цифрового перетворювача одночасно з'єднаний з другим входом цифро-аналогового перетворювача, четвертим входом блока керування, інверсними входами других і четвертих ключів та входами перших і третіх ключів.
Текст
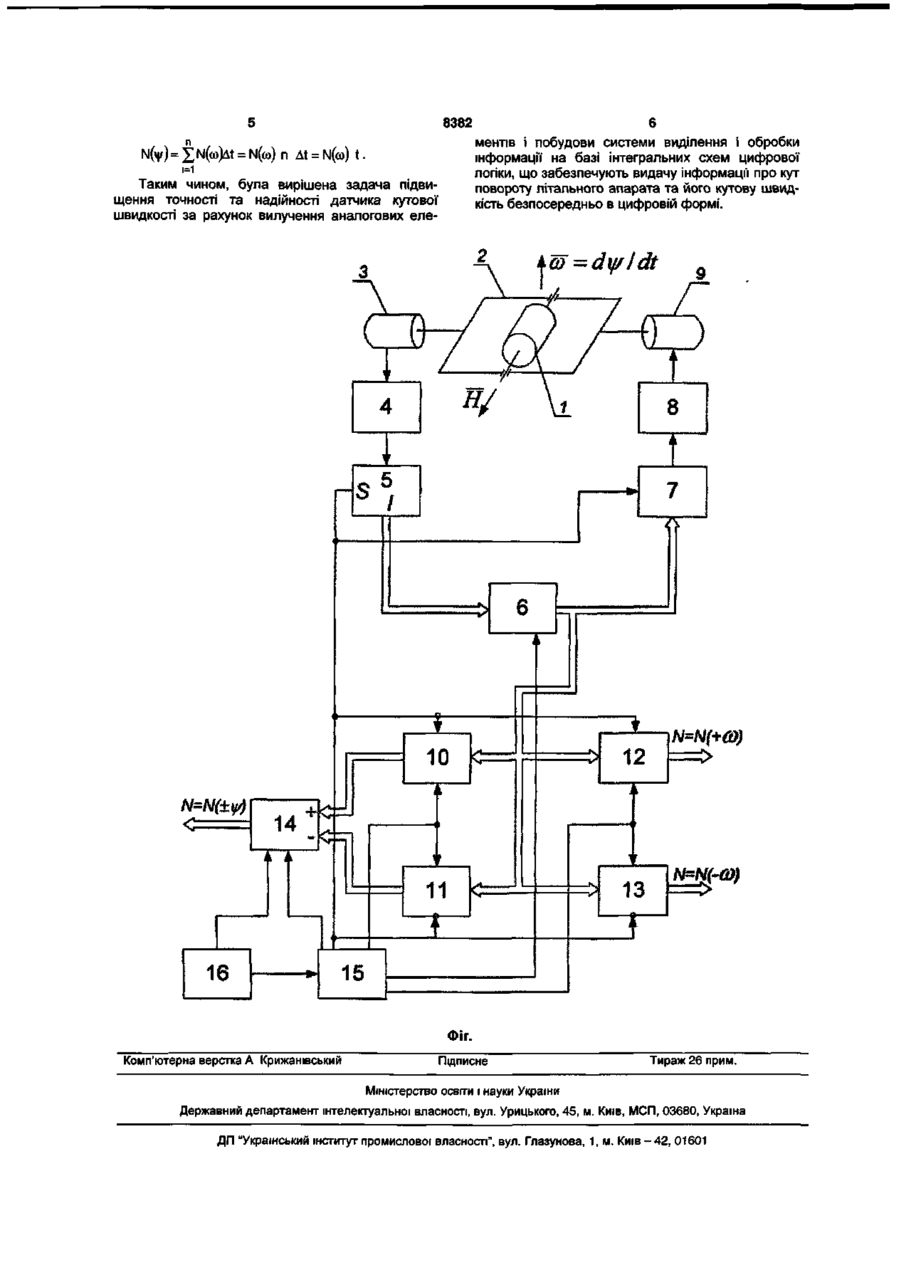
Датчик кутової швидкості, що містить провузол, датчики кута, моменту і підсилювач зворотного зв'язку, який відрізняється тим, що в нього додатково введені два підсилювачі, аналогоцифровий та цифро-аналоговий перетворювачі, пристрій вибору та збереження інформації, чотири ключі, реверсивний лічильник, блоки керування і синхронізації, і причому вихід датчика кута через перший підсилювач, аналого-цифровий перетворювач, пристрій вибору та збереження інформації, цифро-аналоговий перетворювач та другий підсилювач з'єднаний з входом датчика моменту, вихід пристрою вибору та збереження інформації додатково з'єднаний з входами першого, другого, третього та четвертого ключів, виходи перших ключів з'єднані з позитивним входом реверсивного лічильника, перший вхід якого з'єднаний з п'ятим виходом блока керування, а другий вхід з'єднаний з другим виходом блока синхронізації, перший вихід якого з'єднаний з шостим входом блока керування, перший, другий та третій виходи якого ВІДПОВІДНО з'єднані з другими входами третіх і четвертих ключів, пристроєм вибору та збереження інформації, а також з першими і другими ключами аналогоцифрового перетворювача, а знаковий вихід аналого-цифрового перетворювача одночасно з'єднаний з другим входом цифро-аналогового перетворювача, четвертим входом блока керування, інверсними входами других і четвертих ключів та входами перших і третіх ключів со Корисна модель відноситься до області приладобудування та може бути використана у авіаційній промисловості для вимірювання кутової швидкості ВІДОМІ пристрої вимірювання кутової швидкості рухомих об'єктів, які побудовані на базі двохступеневих гіроскопів з жорстким зворотнім зв'язком відносно кута повороту промотора, та які мають датчики кута аналогового типу і датчики моменту електромагнітного або магнітоелектричного типу [Б Ц Назаров, С А Черников, Г А Хлебников, Г В Верхов Командно-измерительные приборы М МО СССР, 1987, 638с стор 180 И А Горенштейн, И А Шульман Инерциальные навигационные системы М Машиностроение, 1970, 231с стор 139] До недоліків описаного датчика кутової швидкості відноситься наявність аналогового вихідного сигналу про кутову швидкість обертання об'єкта Відомий датчик кутової швидкості, який вибрано в якості прототипу [Датчик угловой скорости с дискретным выходом А с СССР №529420, М Кл 2 G01P9/02, опубл 25 09 76, БИ №35] Даний датчик кутової швидкості з дискретним виходом містить провузол, датчики кута і моменту, підсилювач зворотного зв'язку, мостовий комутатор, стабілізатор площі імпульсів струму, послідовно з'єднані датчик струму і фазочутливий підсилювач, трансформатор, вихідна обмотка якого включена між датчиком струму і комутатором, а первинна обмотка, через послідовно з'єднані транзистор і діод, підключена до джерела змінного струму При цьому керуючий вхід транзистора з'єднаний з виходом фазочутливого підсилювача, а у якості ключів комутатора використані кременеві керовані діоди До недоліків такого типу датчиків відноситься низька надійність і точність у зв'язку з побудовою системи виділення корисної інформації та забезпечення зворотного зв'язку на базі окремих аналогових елементів - ДІОДІВ, транзисторів, трансформаторів т і Задача корисної моделі - підвищення точності та надійності датчика кутової швидкості за рахунок вилучення аналогових елементів і побудови системи виділення і обробки інформації на базі інтег С\І 00 со 00 6Г 8382 ральних схем цифрової логіки, що забезпечують видачу інформації про кут повороту літального апарата та його кутову швидкість безпосередньо в цифровій формі. Поставлена задача вирішується завдяки тому, що в датчик кутової швидкості, що містить гіровузол, датчики кута, моменту і підсилювач зворотного зв'язку, що в нього згідно з корисною моделлю додатково введені два підсилювача, аналогоцифровий (АЦП) та цифро-аналоговий (ЦАП) перетворювачі, пристрій вибору та збереження інформації, чотири ключа, реверсивний лічильник, блоки керування і синхронізації, вихід датчика кута через перший підсилювач, АЦП, пристрій вибору та збереження інформації, ЦАП та другий підсилювач з'єднаний з входом датчика моменту, вихід пристрою вибору та збереження інформації додатково з'єднаний з входами першого, другого, третього та четвертого ключів, виходи перших ключів з'єднані з позитивним входом реверсивного лічильника, перший вхід якого з'єднаний з п'ятим виходом блока керування, а другий вхід з'єднаний з другим виходом блока синхронізації, перший вихід якого з'єднаний з шостим входом блока керування, перший, другий та третій виходи якого відповідно з'єднані з другими входами третіх і четвертих ключів, пристроєм вибору та збереження інформації, а також з першими і другими ключами, а знаковий вихід АЦП одночасно з'єднаний з другим входом ЦАП, четвертим входом блока керування, інверсними входами других і четвертих ключів та входами перших і третіх ключів. Запропоноване технічне рішення пояснюється кресленням на Фіг., де відображена загальна функціональна схема побудови датчика кутової швидкості. Датчик кутової швидкості вміщує: 1 - гіровузол, 2 - рама, що несе гіровузол, 3 - датчик кута, 4 перший підсилювач, 5 - аналого-цифровий перетворювач (АЦП), 6 - пристрій вибору та збереження інформації, 7 - цифро-аналоговий перетворювач (ЦАП), 8 - другий підсилювач, 9 - датчик моменту, 10, 11, 12, 1 3 - відповідно перші, другі, треті та четверті ключі, 14 - реверсивний лічильник, 15 - блок керування, 16 - блок синхронізації. Датчик кутової швидкості у якості чутливого елемента містить гіровузол 1, який розташовано у рамі 2. На осі підвісу рами розташований датчик кута 3, вихід якого з'єднаний з входом першого підсилювача 4. Вихід підсилювача 4 з'єднаний з входом аналого-цифрового перетворювача (АЦП) 5, який має інформаційний вихід І та вихід знакового розряду S. Інформаційний вихід І АЦП з'єднаний через пристрій вибору та збереження інформації 6 з входом цифро-аналогового перетворювача (ЦАП) 7, вихід якого через другий підсилювач 8 з'єднаний з входом датчика моменту 9. Додатково вихід пристрою 6 з'єднаний з першими 10, другими 11,з третіми 12 та четвертими 13 ключами. Виходи перших ключів 10 з'єднані з позитивним входом, а виходи других ключів 11 - відповідно з негативним входом лічильника 14. Знаковий вихід S АЦП відповідно з'єднаний з третіми входами перших 10 та третіх 12 ключів, з інверсними входами других 11 та четвертих ключів 13, а також з четвертим входом блока керування 15 і другим входом блока 7. Перший вихід блока керування 15 з'єднаний з другими входами ключів 12 і 13, другий вихід блока 15 з'єднаний з пристроєм вибору та збереження інформації 6, третій вихід блока 15 з'єднаний з другими входами ключів 10 і 11, а п'ятий вихід блока 15 з'єднаний з першим входом реверсивного лічильника 14, другий вхід якого з'єднаний з другим входом блока синхронізації 16, перший вихід якого з'єднаний з шостим входом блока 15. Датчик кутової швидкості працює наступним чином. При обертанні об'єкта навколо осі чутливості датчика з кутовою швидкістю а = d\j. / dt виникає гіроскопічний момент М г = Нсо, де Н - кінетичний момент гіроскопа 1. Завдяки гіроскопічному моменту рама 2 здійснює поворот на деякий кут, наприклад р. Пропорційно кутовому повороту р датчик кута 3 виробляє електричний сигнал, який підсилюється підсилювачем 4. Вихідний сигнал з виходу підсилювача 4 поступає на вхід аналогоцифрового перетворювача 5, на інформаційному виході І якого виробляється цифровий код, а на виході знакового розряду S - відповідний код знаку. Вихідний цифровий код поступає на входи пристрою вибору та збереження 6. З виходу пристрою 6 під керуванням сигналів з другого виходу блока керування 15 цифровий код надходить на входи цифро-аналогового перетворювача 7 і входи перших 10, других 11, третіх 12 та четвертих 13 ключів. Окрім цього код знакового сигналу з виходу S АЦП поступає на ключі 10, 11,12, 13, ЦАП і вхід блока керування 15. Згідно з кодом знаку і інформаційним цифровим кодом з виходу ЦАП формується електричний сигнал, який підсилюється підсилювачем 8 і поступає на вхід датчика моменту 9. Датчик моменту 9 виробляє момент, який зрівноважує гіроскопічний. При цьому з виходу ключів 12, або з виходу ключів 13 відповідно до коду знаку напряму кутової швидкості під керуванням сигналів з першого виходу блока 15 видається цифровий код величини кутової швидкості N (N = N(+G>) або N = N(-co)), а з виходів ключів 10 або 11 цей код під керуванням сигналів з третього виходу блока 15 поступає на позитивний, або негативний входи лічильника 14. Частота видачі кодів (N = N(+co) або N = N(-co)) задається сигналами з першого виходу блока керування 15, робота якого, згідно з часовою діаграмою, задається сигналами синхронізації блока синхронізації 16, що поступають з його першого виходу на шостий вхід блока 15. Процеси роботи лічильника 14 при виконанні режимів додавання або віднімання синхронізуються сигналами блока керування 15, які поступають з його п'ятого виходу на перший вхід лічильника 14. Час накопичення інформації, або виконання операції інтегрування лічильником 14 визначається сигналами, що поступають з другого виходу блока синхронізації 16 на відповідні другі входи лічильника 14: t \у = Jtodt, о або в цифровій формі 8382 ментів і побудови системи виділення і обробки інформації на базі інтегральних схем цифрової логіки, що забезпечують видачу інформації про кут повороту літального апарата та його кутову швидкість безпосередньо в цифровій формі. N(\|/)= XN(oo)At = N(co) n At = N((o) t . 1=1 Таким чином, була вирішена задача підвищення точності та надійності датчика кутової швидкості за рахунок вилучення аналогових еле 10 12 11
ДивитисяДодаткова інформація
Назва патенту англійськоюAngular velocity transducer
Автори англійськоюSubota Anatolii Maksymovych, Dzhulhakov Vitalii Heorhiiovych
Назва патенту російськоюДатчик угловой скорости
Автори російськоюСубота Анатолий Максимович, Джулгаков Виталий Георгиевич
МПК / Мітки
МПК: G01P 9/00
Мітки: кутової, датчик, швидкості
Код посилання
<a href="https://ua.patents.su/4-8382-datchik-kutovo-shvidkosti.html" target="_blank" rel="follow" title="База патентів України">Датчик кутової швидкості</a>
Датчик кутової швидкості

Номер патенту: 2678
Опубліковано: 15.07.2004
Автори: Мурзаханов Олександр Валентинович, Шкляр Володимир Петрович, Самусь Андрій Ігорович, Шервашидзе Володимир Варламович
МПК: G01P 9/00
Мітки: датчик, швидкості, кутової
Формула / Реферат:
Датчик кутової швидкості, що містить чутливий елемент з гіромотором і системою підвісу, датчик кутового положення, наприклад, індуктивного типу, блок управління рухом чутливого елементу, схему вимірювання кутової швидкості, який відрізняється тим, що до його складу введені обмежувач та інвертуючий інтегратор, причому вхід та вихід інвертуючого інтегратора з'єднані через обмежувач з виходом та входом схеми вимірювання кутової швидкості...
Датчик кутової швидкості
Номер патенту: 2109
Опубліковано: 15.10.2003
Автори: Мурзаханов Олександр Валентинович, Шервашидзе Володимир Варламович, Леоненко Костянтин Миколайович
МПК: G01P 11/00, G01P 9/00
Мітки: кутової, швидкості, датчик
Формула / Реферат:
1. Датчик кутової швидкості, що містить розміщений за допомогою гнучкого підвісу чутливий елемент з гіромотором, датчик положення, коло зворотного зв'язку, схему визначення показника кутової швидкості, при цьому компенсаційна котушка силового перетворювача кола зворотного зв'язку встановлена на чутливому елементі між розміщеними від неї із зазором плоскими постійними магнітами із зустрічною орієнтацією магнітних полів, а коло зворотного...
Датчик кутової швидкості та система його віброзахисту
Номер патенту: 1207
Опубліковано: 15.04.2002
Автори: Шкляр Володимир Петрович, Леоненко Сергій Миколайович, Васильєв Володимир Леонідович, Олексієнко Микола Петрович, Гаврилюк Володимир Леонідович, Шервашидзе Володимир Варлаамович, Гуменюк Володимир Григорович
МПК: G01P 9/00, G01C 19/00
Мітки: датчик, швидкості, віброзахисту, кутової, система
Формула / Реферат:
1. Датчик кутової швидкості, який містить розміщений за допомогою підвісу чутливий елемент з гіромотором, датчик положення, коло зворотного зв'язку та схему визначення показника кутової швидкості, який відрізняється тим, що чутливий елемент підвішено у корпусі за допомогою гнучкого підвісу, гіромотор встановлено на чутливому елементі так, що вісь його обертання направлена перпендикулярно до осі, по якій згинається підвіс, і паралельно з віссю...
Датчик кутової швидкості

Номер патенту: 17753
Опубліковано: 20.05.1997
Автори: Поджаренко Андрій Володимирович, Поджаренко Володимир Олександрович, Кухарчук Василь Васильович, Кулаков Павло Ігоревич, Гоменюк Анатолій Сергійович
МПК: G01P 3/42
Мітки: швидкості, кутової, датчик
Формула / Реферат:
Датчик угловой скорости, содержащий источник света, модулятор светового потока в виде диска, в котором выполнены прозрачные и непрозрачные элементы равной угловой ширины, линейный фотоприемник, диафрагму, установленную перед фотоприемником, отличающийся тем, что в него введен второй фотоприемник, сдвинутый относительно первого по отношению к центру модулятора на угол, который в полтора раза больше угловой ширины прозрачных и непрозрачных...
Датчик кутової швидкості для динамічних вимірювань

Номер патенту: 24374
Опубліковано: 17.07.1998
Автори: Кухарчук Василь Васильович, Михалевич Володимир Маркусович, Кулаков Павло Ігорович, Поджаренко Володимир Олександрович, Поджаренко Андрій Володимирович, Кучерук Володимир Юрійович
МПК: G01P 3/42
Мітки: швидкості, динамічних, кутової, вимірювань, датчик
Формула / Реферат:
Датчик угловой скорости для динамических измерений, содержащий источник света, модулятор светового потока, два линейных фотоприемника, диафрагму, установленную перед линейными фотоприемниками, два компаратора напряжений, выходы которых присоединены ко входам элемента ИЛИ, выход которого присоединен к тактовому входу счетного триггера, прямой выход которого присоединен к адресному входу аналогового коммутатора, выходы первого и второго...
Попередній патент: Кавітаційний насадок
Наступний патент: Пристрій мажоритарного резервування
Випадковий патент: Колесо вагонетки