Безпілотний літальний апарат observer-smp

Формула / Реферат
1. Безпілотний літальний апарат, що містить фюзеляж, подовжені крила, гвинт, елерони, закрилки, підвісний пристрій, оснащений відеокамерою з 20-30-кратним оптичним збільшенням, стабілізатор, кіль, руль повороту, електродвигун, бортове обладнання, який відрізняється тим, що центральна консоль крила закріплена до фюзеляжу, додано обтікачі - верхній над центральною консоллю крила і нижній під віссю фюзеляжу, використано два безколекторні синхронні електродвигуни у підвісному пристрої, живлення яких, як і бортового обладнання, здійснено від літій-полімерних акумуляторів, об'єднаних у батареї, гвинт виконано трилопатевим тягнучого типу із складаними лопатями, а також безпілотний літальний апарат містить пристрій з відеокамерою для спостереження, гіростабілізований по двох вістях, автоматичну систему парашутної посадки, що складається з двох парашутів - основного та витяжного, розміщених під кришкою верхнього обтікача, внутрішній контейнер з повітряною подушкою та імпелером.
2. Безпілотний літальний апарат за п. 1, який відрізняється тим, що крила і фюзеляж виготовлені з композитних матеріалів.
3. Безпілотний літальний апарат за п. 1, який відрізняється тим, що бортове обладнання складається з обладнання контролю та керування літальним апаратом і навісного обладнання.
4. Безпілотний літальний апарат за п. 1, який відрізняється тим, що потужність електричного двигуна становить 1600 Вт.
5. Безпілотний літальний апарат за п. 1, який відрізняється тим, що використано єдиний цифровий канал зв'язку з динамічним шифруванням на базі радіомодема.
Текст
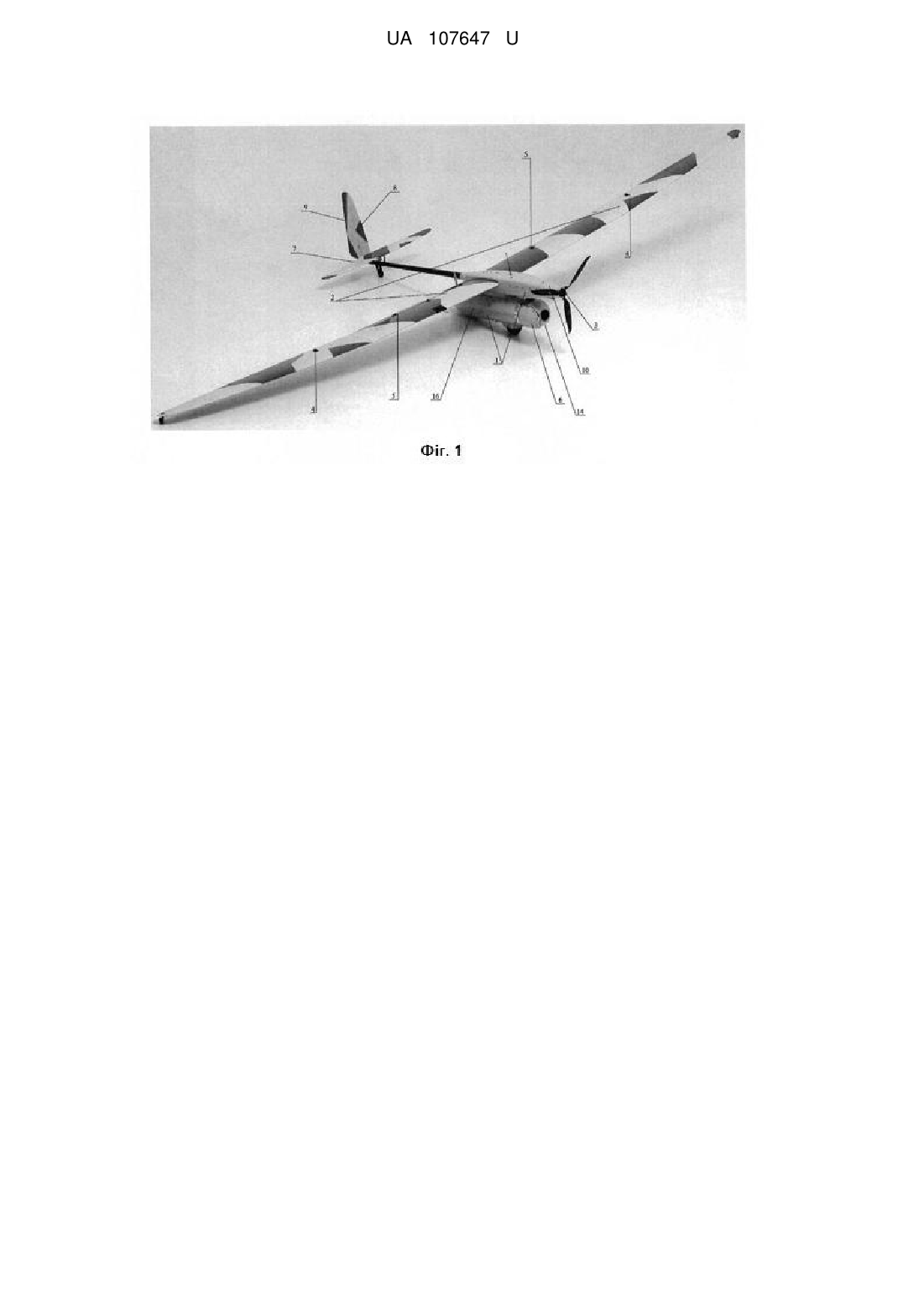
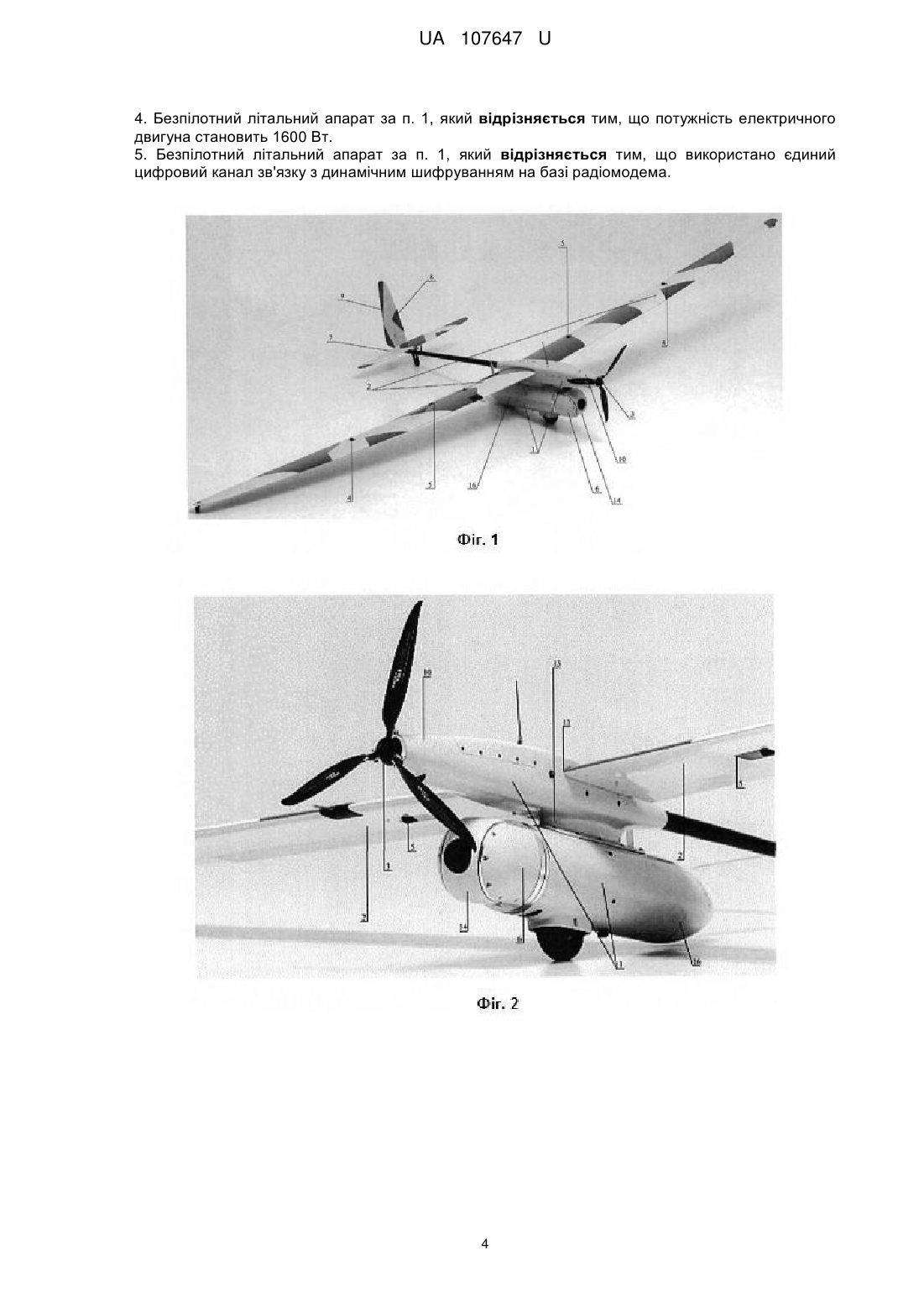
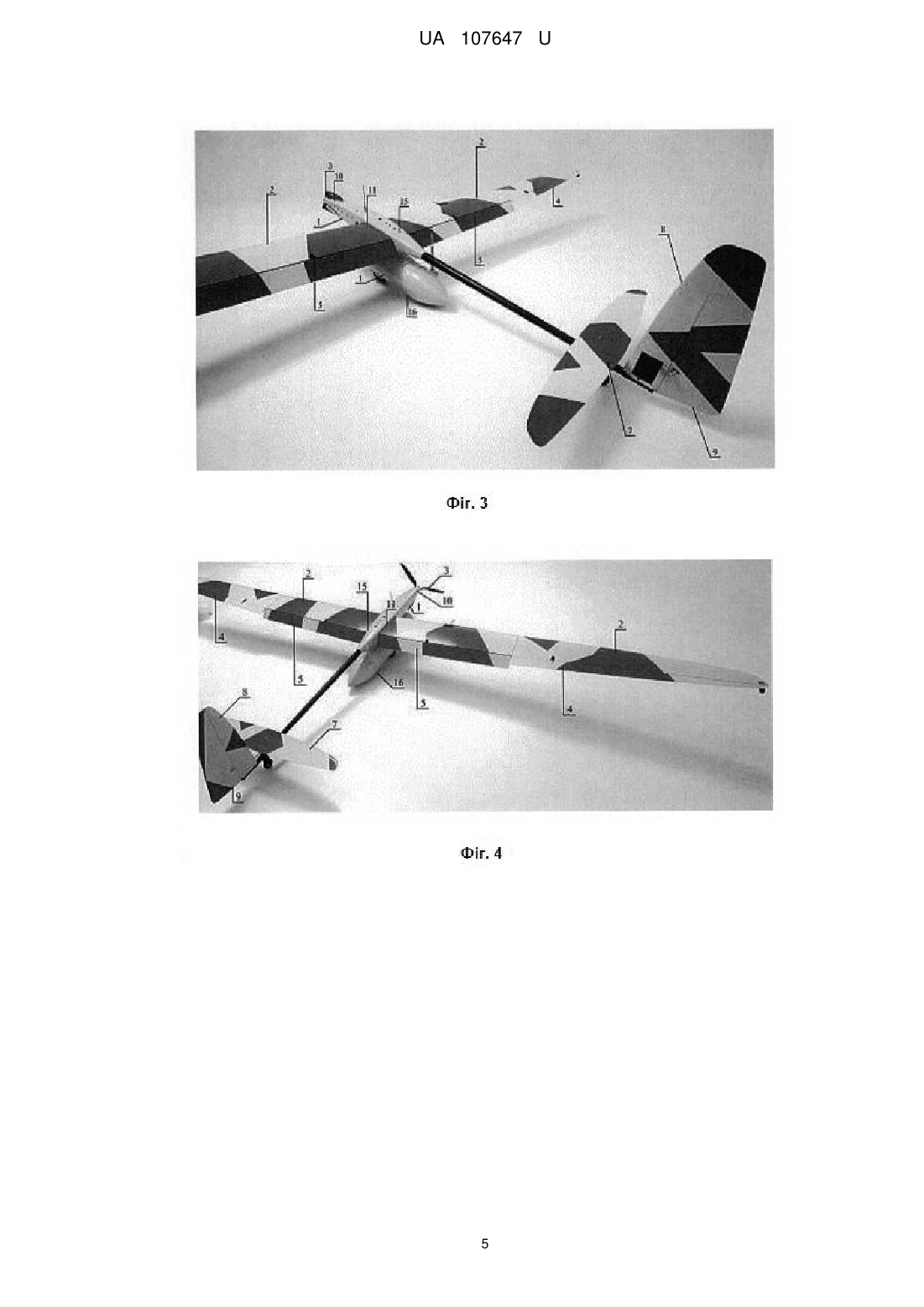
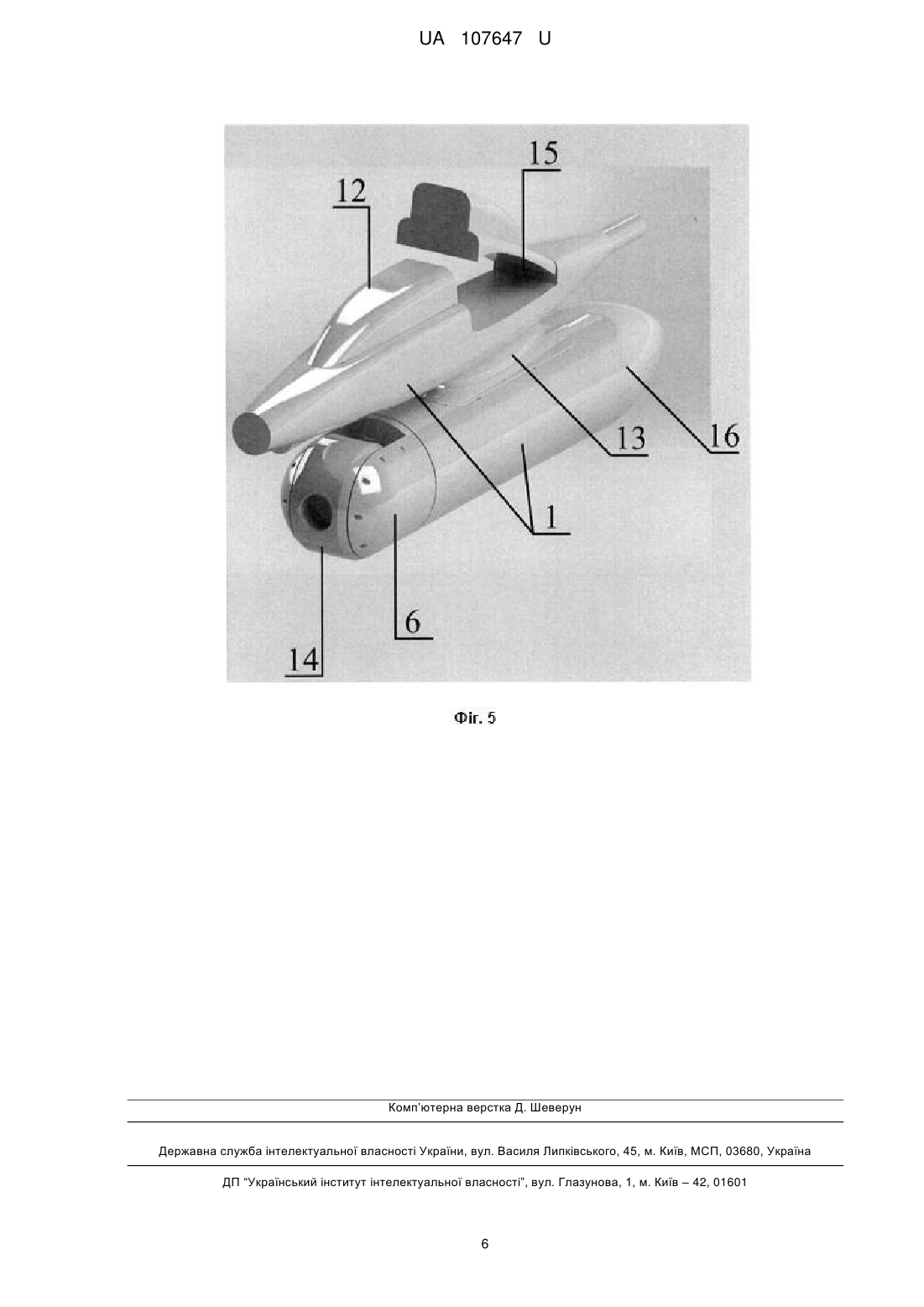
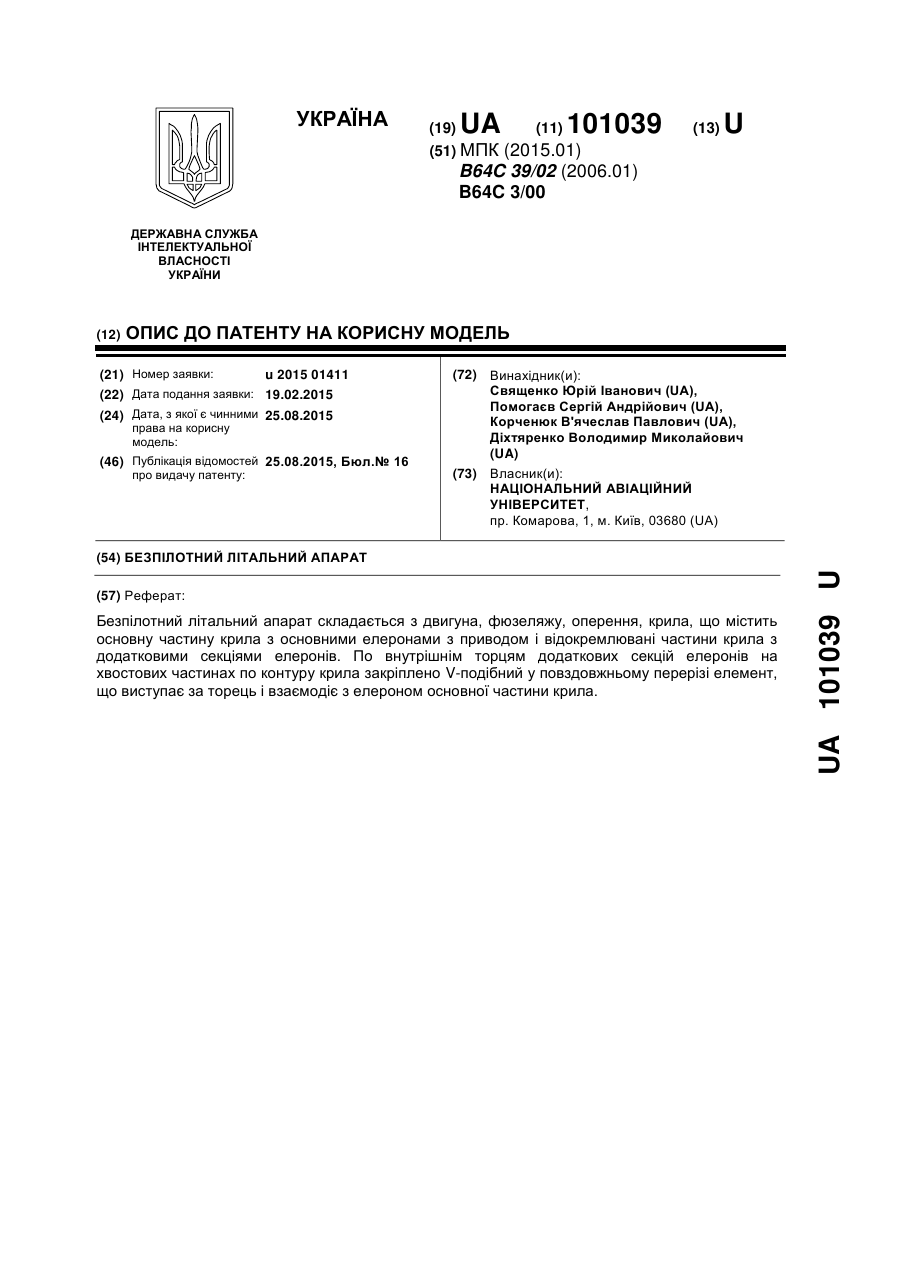
Реферат: Безпілотний літальний апарат містить фюзеляж, подовжені крила, гвинт, елерони, закрилки, підвісний пристрій, оснащений відеокамерою з 20-30-кратним оптичним збільшенням, стабілізатор, кіль, руль повороту, електродвигун, бортове обладнання. Центральна консоль крила закріплена до фюзеляжу, додано обтікачі - верхній над центральною консоллю крила і нижній під віссю фюзеляжу. Використано два безколекторні синхронні електродвигуни у підвісному пристрої, живлення яких, як і бортового обладнання, здійснено від літій-полімерних акумуляторів, об'єднаних у батареї. Гвинт виконано трилопатевим тягнучого типу із складаними лопатями. Літальний апарат містить пристрій з відеокамерою для спостереження, гіростабілізований по двох вістях, автоматичну систему парашутної посадки, що складається з двох парашутів - основного та витяжного, розміщених під кришкою верхнього обтікача, внутрішній контейнер з повітряною подушкою та імпелером. Крила і фюзеляж виготовлені з композитних матеріалів. Бортове обладнання складається з обладнання контролю та керування літальним апаратом і навісного обладнання. Потужність електричного двигуна становить 1600 Вт. Використано два безколекторні синхронні електродвигуни у підвісному пристрої, єдиний цифровий канал зв'язку з динамічним шифруванням на базі радіомодема та автоматичну систему парашутної посадки, що складається з двох парашутів - основного та витяжного, розміщених під кришкою верхнього обтікача, внутрішній контейнер з повітряною подушкою та імпелером. UA 107647 U (12) UA 107647 U UA 107647 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до авіації, зокрема до безпілотних літальних апаратів, і може бути використана для виконання аерофотозйомки місцевості і повітряної розвідки, а також передачі відеосигналу в режимі реального часу. Відомий безпілотний літальний апарат (БпЛА), який характеризується наявністю фюзеляжу, розміщеного за схемою центроплан подовженого крила, розділеного на дві консолі, зчленованих з фюзеляжем в зоні його максимальної будівельної ширини, хвостового оперення, що складається з двох консолей, розташованих V-подібно, трьохопорного шасі, що прибирається, силової установки, рушія у вигляді гвинто-вентилятора, розміщеного в кільцевому каналі, екранованого хвостовим оперенням, паливних баків у крилі і фюзеляжі. Кожна консоль подовженого крила містить закрилок, розділений на секції з приводами, що функціонують незалежно один від одного, і один елерон з приводом. Кожна консоль хвостового оперення містить дві секції керма висоти і напряму з приводами. Шасі містить дві основні стійки з колесами і приводами, стійку носового шасі з колесом, механізмом рулювання і приводом. Силова установка містить закритий капотом авіаційний двигун внутрішнього згоряння, розташований у фюзеляжі, поблизу центру мас. У фюзеляжі розміщені відсік бортового обладнання і відсік корисного навантаження [RU № 143213 U1, B64C5/02, 2014]. Найближчим до корисної моделі, що заявляється, є безпілотний літальний апарат, який включає фюзеляж, розміщений за схемою центроплан подовженого крила, розділеного на консолі, подовжене крило, гвинт, елерон, закрилки, хвостове оперення: стабілізатор - кермо висоти, кіль і кермо напряму; шасі, двигун, бортове обладнання, відеокамеру з 30-кратним оптичним збільшенням, яка має гіростабілізований підвісний пристрій, подовжене крило має вуглепластикові композитні лонжерони, знімні консолі, горизонтальне оперення виконано знімним, використано дволопатевий гвинт тягнучого типу, одноколісне шасі, безколекторний синхронний електродвигун, крило і фюзеляж виготовлені з композитних матеріалів, бортове обладнання складається з обладнання контролю та керування літальним апаратом і навісного обладнання для виконання фотовідеозйомки або інших завдань, а живлення безколекторного синхронного електродвигуна і бортового обладнання здійснено від літій-полімерних акумуляторів великої ємності [UA 2 № 102116, B64C 39/02, B64D 47/08, B64C 3/00, B64C 11/00, 2015]. Зазначений безпілотний літальний апарат, як і попередній аналог, не має достатньо високих льотно-технічних характеристик. В основу корисної моделі поставлена задача удосконалити конструкцію безпілотного літального апарата для підвищення його льотно-технічних характеристик. Поставлена задача вирішується тим, що у безпілотному літальному апараті, що містить фюзеляж, подовжене крило, гвинт, елерон, закрилки, пристрій, оснащений відеокамерою з 30кратним оптичним збільшенням, стабілізатор - кермо висоти, кіль, рульповороту, електродвигун, бортове обладнання, згідно з корисною моделлю, центральна консоль крила закріплена до фюзеляжу, додано обтікачі - верхній над центральною консоллю крила і нижній під віссю фюзеляжу, використано два безколекторні синхронні електродвигуни у підвісному пристрої, живлення яких, як і бортового обладнання, здійснено від літій-полімерних акумуляторів, об'єднаних у батареї, гвинт виконано трилопатевим тягнучого типу із складаними лопатями, а також безпілотний літальний апарат містить автоматичну систему парашутної посадки, що складається з двох парашутів - основного та витяжного, розміщених під кришкою верхнього обтікача, внутрішній контейнер з повітряною подушкою та імпелером. Подовжені крила мають вуглепластикові композитні лонжерони. Крила і фюзеляж виготовлені з композитних матеріалів. Бортове обладнання складається з обладнання контролю та керування літальним апаратом і навісного обладнання. Потужність електричного двигуна становить 1600 Вт. У безпілотному літальному апараті використано єдиний цифровий канал зв'язку з динамічним шифруванням на базі радіомодема. Через конструктивні зміни - відсутності верхнього пілона (у порівнянні з прототипом), кріплення центральної консолі крила безпосередньо до фюзеляжу, зміни форми фюзеляжу за рахунок додавання обтікачів верхнього (над центральною консоллю крила) та нижнього (під віссю фюзеляжу), а також підсилення потужності синхронного безколекторного електродвигуна і застосування трилопатевого гвинта тягнучого типу із складаними лопатями (у прототипі дволопатевий з лопатями постійного положення) збільшено аеродинамічну якість до показника 20-25. Застосування трилопатевого гвинта стабілізувало мінімальну швидкість польоту в межах 1012 м/с на малих обертах двигуна, що підвищило зручність відеозйомки та максимальну 1 UA 107647 U 5 10 15 20 швидкість до 30 м/с. Завдяки підвищенню максимальної швидкості БпЛА Observer SMP має можливість виконувати політ і проводити відеозйомку в більш складних метеоумовах (при наявності зустрічного вітру з поривами 10-15 м/с). Використання трилопатевого гвинта із складаними лопатями підвищило живучість апарата завдяки зниженню ризику пошкоджень гвинта при посадці на поверхню з нерівностями рельєфу. Мінімальний час знаходження у польоті збільшено від 60 до 90 хвилин, навіть при максимальній масі корисного навантаження. Застосування двох синхронних безколекторних електродвигунів дозволило здійснювати керування поворотом відеокамери по двох осях X і Ζ - одночасно. У прототипі один двигун дозволяв послідовно керувати поворотом відеокамери по одній, слідом по другій осі. Таким чином вирішено завдання підвищення безперервності відеозйомки визначених об'єктів. Заміна одноколісного шасі безпілотного літального апарата на внутрішній контейнер з повітряною подушкою та імпелером (повітронадувачем) дозволило здійснювати посадку апарата в умовах несприятливого рельєфу на повітряну подушку з уникненням пошкоджень. У порівнянні з прототипом у БпЛА Observer SMP змінено систему зв'язку - використано єдиний цифровий канал зв'язку з динамічним шифруванням на базі відповідного радіомодема. Це рішення дозволяє передавати з певним захистом від первісного перехоплення за єдиним каналом відеосигнал, телеметричні дані, координати визначеного об'єкту та здійснювати по цьому ж каналу керування апаратом (зміна маршруту, висоти, швидкості) та відеокамерою при виконанні польотного завдання. Завдяки конструктивним змінам у фюзеляжі БпЛА Observer SMP, не дивлячись на застосування додаткового обладнання, злітна вага апарата лишилася в межах 5,5 кг. Льотнотехнічні характеристики БпЛА Observer SMP наведені в Таблиці. Таблиця Зліт Посадка Тривалість польоту Маршрут польоту Швидкість Дальність каналу даних Канал даних Відеоканал Запуск "з руки" (основний); зліт і набір висоти відбувається в автоматичному режимі. Можливе на рівній ділянці поверхні керування оператором Парашутна система з приземленням на повітряну подушку (основна) 90-180 хв. залежно від корисного навантаження і комплектації. від 80 до 160 км залежно від корисного навантаження, комплектації, та метеоумов (сили зустрічного вітру) 40-120 км/год. Більше 30 км. Цифровий канал несучої частоти 918-927 МГц, застосоване ППРЧ Високочастотний AV канал До 30 км. Залежно від висоти виконання польоту, радіочастотної Дальність відеоканалу обстановки і висоти установки наземного антенного комплексу Силова установка Безколекторні синхронні електродвигуни Комплексна система автоматичного пілотування з GPS приймачем, двохосьовим гіроскопом, трьохосьовим акселерометром, датчиком повітряної швидкості, датчиком повітряного тиску в режимі реального часу БпЛА Observer-SMP передає всю необхідну польотну інформацію, Система управління можлива зміна маршруту польоту в режимі реального часу, підтримується режим обльоту встановленої точки по колу із заданим радіусом, при втраті зв'язку БпЛА Observer-SMP автоматично повернеться на місце старту Корисне 2-2,5 кг навантаження Злітна вага 5-5,8 кг Довжина 1700 мм Розмах крила 3400 мм Тягооснащеність 1 Аеродинамічна якість 20-25 25 Корисна модель пояснюється кресленнями. На Фіг. 1 зображено загальний вигляд безпілотного літального апарата; 2 UA 107647 U 5 10 15 20 25 30 35 40 На Фіг. 2 - вигляд безпілотного літального апарата з підвісним пристроєм (в ньому відеокамерою), з трилопатевим гвинтом тягнучого типу, безколекторним синхронним електродвигуном у носовій частині корпусу фюзеляжу; на Фіг. 3 - вигляд безпілотного літального апарата зі стабілізатором, кілем, кермом напряму; на Фіг. 4 - розмах крила, закрилки; на Фіг. 5 - вигляд фюзеляжу з верхнім обтікачем, де розташовані витяжний та основний парашути. Безпілотний літальний апарат містить фюзеляж 1 (капсула з обладнанням, розміщена за схемою центроплан подовженого крила, розділеного на консолі), подовжені крила 2, що мають вуглепластикові композитні лонжерони, гвинт 3 трилопатевий тягнучого типу із складаними лопатями, елерони 4, закрилки 5, підвісний пристрій, оснащений відеокамерою 6 з 30-кратним оптичним збільшенням, стабілізатор 7, кіль 8, руль повороту 9, синхронний безколекторний електродвигун 10 потужністю 1600Вт, бортове обладнання. Центральна консоль 11 крила закріплена до фюзеляжу 1. Додано обтікачі - верхній 12 над центральною консоллю 11 крила і нижній 13 - під віссю фюзеляжу 1. Додано один електродвигун (всього 2) у підвісний пристрій. Живлення безколекторного синхронного електродвигуна 10, електродвигунів підвісного пристрою, відеокамери та бортового обладнання здійснено від літій-полімерних акумуляторів, об'єднаних у батареї. Безпілотний літальний апарат містить пристрій 14 з відеокамерою для спостереження, гіростабілізований по двох осях, автоматичну систему парашутної посадки, що складається з двох парашутів 15 - основного та витяжного, розміщених під кришкою верхнього 12 обтікача, внутрішній контейнер 16 з повітряною подушкою та імпелером. Крила і фюзеляж виготовлені з композитних матеріалів. Бортове обладнання складається з обладнання контролю та керування літальним апаратом і навісного обладнання. Безпілотний літальний апарат містить єдиний цифровий канал зв'язку з динамічним шифруванням на базі радіомодема. БпЛА OBSERVER-SMP здатний виконувати автоматичний політ по заданому маршруту з можливістю його коректування в режимі реального часу, Протягом всього польоту БпЛА OBSERVER-SMP передає інформацію про хід виконання польотів, своє місце розташування з прив'язкою на карті, повітряної і шляхової швидкості, курс польоту, висоту. При необхідності БпЛА OBSERVER-SMP у зазначеній точці здійснює автоматично аерофотозйомку місцевості. Відеокамера, встановлена на БпЛА OBSERVER-SMP, керується оператором по двох осях з наземної станції, БпЛА OBSERVER-SMP має режим обльоту зазначеної точки із заданим радіусом, автоматично здійснюючи корекційну поправку, враховуючи кутові швидкості польоту, що виникають при дії атмосферних погодних явищ. БпЛА OBSERVER-SMP в автоматичному режимі розраховує координати цілі, що спостерігається. Здійснено автоматичний супровід нерухомої наземної цілі. Повністю автоматичне виконання польотного завдання, враховуючи етап зльоту та посадки, досягається за рахунок використання системи автопілотування високої аеродинамічної досконалості безпілотного літального апарата. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 55 60 1. Безпілотний літальний апарат, що містить фюзеляж, подовжені крила, гвинт, елерони, закрилки, підвісний пристрій, оснащений відеокамерою з 20-30-кратним оптичним збільшенням, стабілізатор, кіль, руль повороту, електродвигун, бортове обладнання, який відрізняється тим, що центральна консоль крила закріплена до фюзеляжу, додано обтікачі - верхній над центральною консоллю крила і нижній під віссю фюзеляжу, використано два безколекторні синхронні електродвигуни у підвісному пристрої, живлення яких, як і бортового обладнання, здійснено від літій-полімерних акумуляторів, об'єднаних у батареї, гвинт виконано трилопатевим тягнучого типу із складаними лопатями, а також безпілотний літальний апарат містить пристрій з відеокамерою для спостереження, гіростабілізований по двох вістях, автоматичну систему парашутної посадки, що складається з двох парашутів - основного та витяжного, розміщених під кришкою верхнього обтікача, внутрішній контейнер з повітряною подушкою та імпелером. 2. Безпілотний літальний апарат за п. 1, який відрізняється тим, що крила і фюзеляж виготовлені з композитних матеріалів. 3. Безпілотний літальний апарат за п. 1, який відрізняється тим, що бортове обладнання складається з обладнання контролю та керування літальним апаратом і навісного обладнання. 3 UA 107647 U 4. Безпілотний літальний апарат за п. 1, який відрізняється тим, що потужність електричного двигуна становить 1600 Вт. 5. Безпілотний літальний апарат за п. 1, який відрізняється тим, що використано єдиний цифровий канал зв'язку з динамічним шифруванням на базі радіомодема. 4 UA 107647 U 5 UA 107647 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B64C 39/02, B64C 3/00, B64C 11/00, B64D 47/08
Мітки: observer-smp, безпілотний, літальний, апарат
Код посилання
<a href="https://ua.patents.su/8-107647-bezpilotnijj-litalnijj-aparat-observer-smp.html" target="_blank" rel="follow" title="База патентів України">Безпілотний літальний апарат observer-smp</a>
Безпілотний літальний апарат observer-s

Номер патенту: 102116
Опубліковано: 12.10.2015
Автори: Мічковський Іван Миколайович, Шишов Дмитро Володимирович
МПК: B64C 39/02, B64C 3/00, B64D 47/08, B64C 11/00
Мітки: observer-s, безпілотний, апарат, літальний
Формула / Реферат:
1. Безпілотний літальний апарат, що включає фюзеляж, розміщений за схемою центроплан подовженого крила, розділеного на консолі, подовжене крило, гвинт, елерон, закрилки, хвостове оперення: стабілізатор - кермо висоти, кіль і кермо напряму; шасі, двигун, бортове обладнання, який відрізняється тим, що містить відеокамеру з 30-кратним оптичним збільшенням, яка має гіростабілізований підвісний пристрій; подовжене крило має вуглепластикові...
Безпілотний літальний апарат
Номер патенту: 101039
Опубліковано: 25.08.2015
Автори: Помогаєв Сергій Андрійович, Діхтяренко Володимир Миколайович, Корченюк Вячеслав Павлович, Священко Юрій Іванович
МПК: B64C 3/00, B64C 39/02
Мітки: безпілотний, апарат, літальний
Формула / Реферат:
Безпілотний літальний апарат, що складається з двигуна, фюзеляжу, оперення, крила, що містить основну частину крила з основними елеронами з приводом і відокремлювані частини крила з додатковими секціями елеронів, який відрізняється тим, що по внутрішнім торцям додаткових секцій елеронів на хвостових частинах по контуру крила закріплено V-подібний у повздовжньому перерізі елемент, що виступає за торець і взаємодіє з елероном основної частини...
Безпілотний літальний апарат (бпла-пс)

Номер патенту: 63125
Опубліковано: 26.09.2011
Автори: Переверзєв Олександр Михайлович, Священко Юрій Іванович, Харченко Володимир Петрович, Корченюк Вячеслав Павлович
МПК: B64C 13/00, B64C 21/00
Мітки: літальний, безпілотний, бпла-пс, апарат
Формула / Реферат:
Безпілотний літальний апарат, що містить крило, оперення, фюзеляж у вигляді крила надмалого подовження з закінцівкою з приводом, з підфюзеляжним гребенем, встановлений на пілоні над фюзеляжом двигун з поворотним, оснащеним приводом соплом з формою на зрізі, близькою до кругової, який відрізняється тим, що зріз сопла має знизу напрямну частину, а сопло виконане поворотним до об'єднання по прямій напрямній частині зрізу сопла з фюзеляжем, при...
Безпілотний літальний апарат

Номер патенту: 59387
Опубліковано: 10.05.2011
Автори: Пасічник Віктор Олександрович, Переверзєв Олександр Михайлович, Харченко Володимир Петрович, Священко Юрій Іванович
МПК: B64C 23/00
Мітки: безпілотний, літальний, апарат
Формула / Реферат:
Безпілотний літальний апарат, що містить фюзеляж, крило в середній частині фюзеляжу, оперення ззаду на фюзеляжі, двигун, встановлений над фюзеляжем і крилом, який відрізняється тим, що частина фюзеляжу, розміщена перед крилом, виконана у вигляді передньої частини крила надмалого подовження.
Безпілотний літальний апарат

Номер патенту: 81372
Опубліковано: 25.06.2013
Автори: Священко Юрій Іванович, Діхтяренко Володимир Миколайович, Бугайко Дмитро Олександрович, Харченко Володимир Петрович, Корченюк Вячеслав Павлович
МПК: B64C 39/02
Мітки: літальний, безпілотний, апарат
Формула / Реферат:
Безпілотний літальний апарат, що має фюзеляж, всередині якого розміщений центр мас БПЛА, крило, двигун, шасі з хвостовою опорою, посадкову парашутну систему зі стропами та механізмом викиду парашуту, вузли кріплення строп з фюзеляжем, який відрізняється тим, що вузли кріплення строп розміщено симетрично по бортах фюзеляжу спереду та вище центру мас БПЛА таким чином, що площина, проходячи через них і центр мас БПЛА, складає кут g=40°… 45 з...
Попередній патент: Спосіб медикаментозного лікування хвороби пейроні
Наступний патент: Спосіб і пристрій для каталітичного оксидування so2-вмісних газів киснем
Випадковий патент: Система живлення багатопаливного двигуна