Спосіб визначення кута непаралельності візирної осі візирного пристрою до динамічної осі машини
Номер патенту: 110454
Опубліковано: 10.10.2016
Автори: Корольов Володимир Миколайович, Сергієнко Роман Вікторович

Формула / Реферат
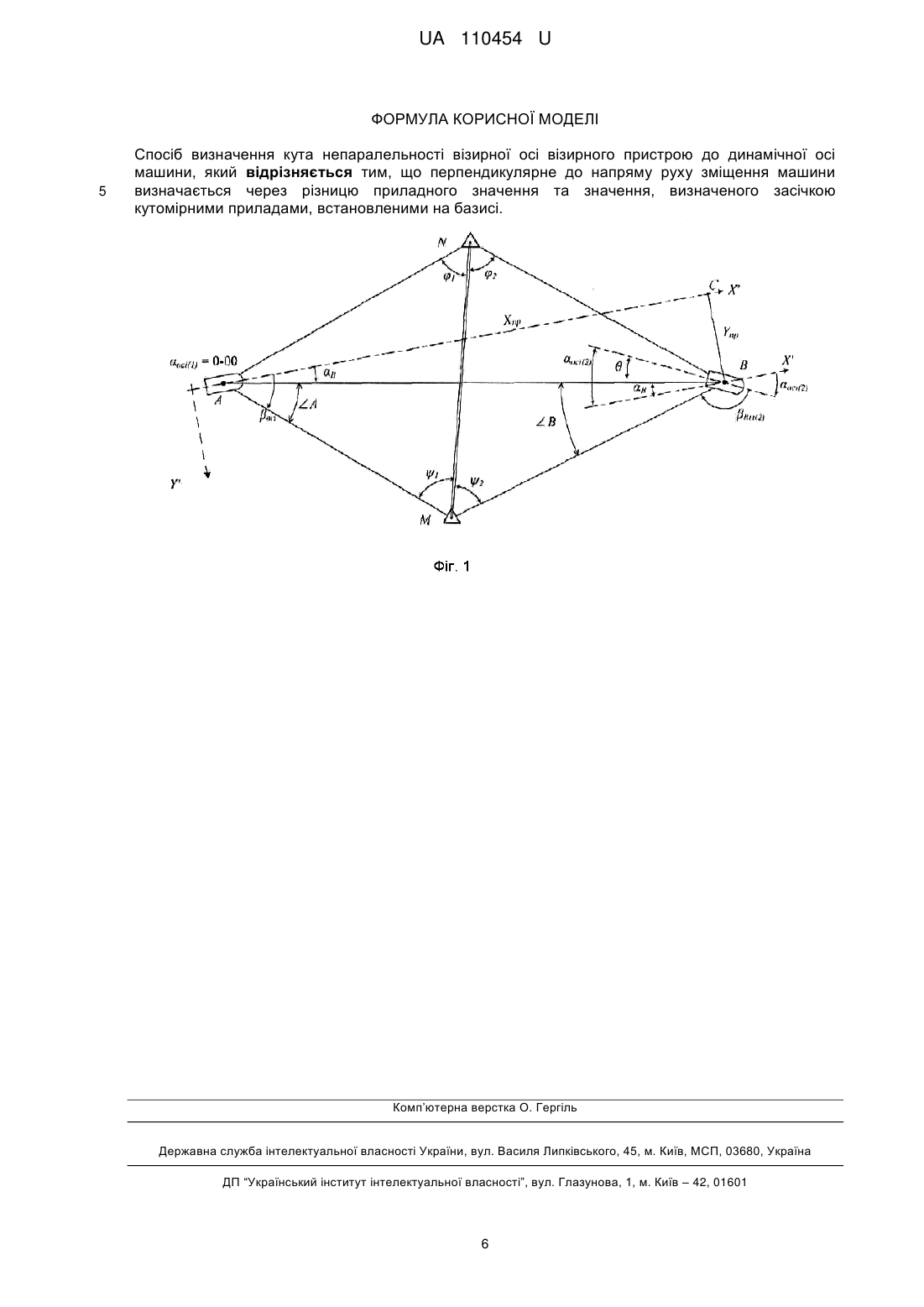
Спосіб визначення кута непаралельності візирної осі візирного пристрою до динамічної осі машини, який відрізняється тим, що перпендикулярне до напряму руху зміщення машини визначається через різницю приладного значення та значення, визначеного засічкою кутомірними приладами, встановленими на базисі.
Текст
Реферат: Спосіб визначення кута непаралельності візирної осі візирного пристрою до динамічної осі машини, причому перпендикулярне до напряму руху зміщення машини визначається через різницю приладного значення та значення, визначеного засічкою кутомірними приладами, встановленими на базисі. UA 110454 U (54) СПОСІБ ВИЗНАЧЕННЯ КУТА НЕПАРАЛЕЛЬНОСТІ ВІЗИРНОЇ ОСІ ВІЗИРНОГО ПРИСТРОЮ ДО ДИНАМІЧНОЇ ОСІ МАШИНИ UA 110454 U UA 110454 U 5 10 15 20 25 30 35 40 45 50 55 60 Спосіб визначення кута непаралельності візирної осі візирного пристрою до динамічної осі машини, який передбачає визначення похибки місцеположення машин внаслідок непаралельності візирної осі візирного пристрою до динамічної осі машини шляхом фіксування початкового та кінцевого положень машини, а також її орієнтацію на місцевості кутомірними приладами, встановленими на базисі. Корисна модель належить до галузі артилерійського озброєння, зокрема до автономних навігаційних засобів. Корисна модель може бути застосована для проведення польових вивірок навігаційної апаратури, зокрема для визначення кута непаралельності візирної осі візирного пристрою до динамічної осі машини. Відомий спосіб визначення кута непаралельності візирної осі візирного пристрою до поздовжньої динамічної осі машини, який вимагає створення мірної ділянки довжиною близько 1 км [1]. При цьому приймають, що дирекційний кут (умовний) з початкової на кінцеву точку дорівнює 0-00. Тоді показання лічильника "У" на кінцевій точці буде прямо пропорційним до кута непаралельності осі візира до поздовжньої осі машини, що дає змогу визначити цей кут. Але такий метод має ряд недоліків, а саме: існує необхідність у створенні ділянки довжиною 1 км, що не завжди можливо; складно навести візирний пристрій на віху на кінцевій точці через значну віддаль до неї х (1 км) та мале збільшення візира (2,7 ); низька точність встановлення машини над кінцевою та початковою точками під час здійснення заїздів. Відомий спосіб "Оцінка непаралельності візувальної осі візира до динамічної осі машини методом заїзду між двома пунктами геодезичної мережі", який передбачає наявність двох пунктів геодезичної мережі та можливість точного визначення дирекційного кута орієнтирного напряму на цих двох пунктах [2]. Але такий спосіб має ряд недоліків, а саме: існує необхідність точного визначення дирекційного кута орієнтирного напряму на початковій та кінцевій точках маршруту вивірки; існує необхідність встановлення машини над початковим та кінцевим пунктами геодезичної мережі, що не завжди можливо; наявність припущення про рівномірність відходу головної осі курсового гіроскопа під час проведення вивірки; маршрут руху між початковим та кінцевим пунктами геодезичної мережі має бути близьким до прямолінійного. В основу корисної моделі поставлено задачу вдосконалити процес отримання інформації про непаралельність візирної осі візирного пристрою до динамічної осі машини, за допомогою використання кутомірних приладів, розташованих на крайніх точках базису, перпендикулярного до маршруту заїзду машини, що надасть необхідний рівень точності визначення положення машини на початковій та кінцевій точках маршруту. Визначення кута непаралельності візирної осі візирного пристрою до динамічної осі машини здійснюють так: перпендикулярне до напряму руху зміщення машини визначається через різницю приладного значення та значення, визначеного засічкою кутомірними приладами, встановленими на базисі. Поставлена задача вирішується таким чином (див. фіг. 1). Приблизно перпендикулярно до маршруту заїзду АВ розмічають базис, на крайніх точках М і N якого встановлюють кутомірні прилади. Цими приладами визначають кути між початковою та кінцевою точками заїзду. На початковій та кінцевій точках також визначають відліки по точці М, на якій встановлено один з кутомірних приладів. Це дає змогу: 1. Визначити довжину маршруту АВ та вважати її як істинну при обчисленні коефіцієнта коректури шляху (калібруванні шляхового пристрою) за умови проведення сумісної вивірки візирного та шляхового пристрою. 2. Визначити зміщення машини по осі ординат У системі координат, вісь ОХ якої проходить за напрямом АВ, 3. Визначити кут непаралельності візирної осі візирного пристрою до динамічної осі машини, а також перевірити значення цього кута вимірами на кінцевій точці маршруту. 4. Зменшити похибки фіксування початкового та кінцевого положень машини, за рахунок визначення положення машини засічкою, а не встановленням її над позначеними початковою, а потім - над кінцевою точками мірної ділянки. 5. Не встановлювати віхи, що позначають мірну ділянку. 6. Не витрачати час на підготовку мірної ділянки (майданчика для вивірки). 1 UA 110454 U 5 10 15 7. Зменшити приблизно у два рази довжину мірної ділянки. 8. Проводити вивірки для декількох машин одночасно, фіксуючи їх положення кутомірними приладами під час підготовки їх навігаційної апаратури до роботи. Суть запропонованої корисної моделі представлено на фіг. 1, де: A - початкова точка маршруту; B - кінцева точка маршруту; MN - базис, розташований приблизно перпендикулярно до маршруту вивірки; Х' - вісь абсцис умовної системи координат; Y' - вісь ординат умовної системи координат; в - дирекційний кут з початкової на кінцеву точку в умовній системі координат OХ'Y'; осі( 2 ) - дирекційний поздовжньої осі машини на кінцевій точці В в умовній системі координат OХ'Y'. Встановленими на крайніх точках базису кутомірними приладами вимірюють кути між лінією базису та напрямом на початкову точку, а після заїзду - і напрямом на кінцеву точку. Початковою і кінцевою точкою є положення візирного пристрою машини перед та після пробігу відповідно. Після отримання цих даних необхідно за теоремою синусів рішенням трикутників AMN і BMN визначити відповідно довжини ліній AM і MB: AM MB 20 MN sin(180 (1 1)) MN sin(180 ( 2 2 )) sin 1; sin 2 Далі з використанням теореми косинусів рішенням трикутника АВМ знаходять довжину сторони АВ: 2 2 AB AM MB 2AM MB cos( 1 2 ). (1) 25 30 35 На початковій точці А перед заїздом, крім того, необхідно зафіксувати положення осі машини відносно напряму на одну з точок базису, що надалі дасть можливість визначити це положення відносно напряму АВ. Для цього на початковій точці необхідно підготувати візирний пристрій до роботи та виміряти кут віз, наприклад, на точку М. Для наочності встановимо, щоб напрям поздовжньої осі машини був максимально наближеним до напряму осі абсцис, відповідно перед заїздом необхідно по шкалі КУРС встановити значення 0-00. Після здійснення заїзду па кінцевій точці зчитують з лічильників "X" та "У" приладні значення Х'пр та У'пр відповідно. Штрих у позначеннях означає, що ці значення - у системі координат, пов'язаній з напрямом осі машини на початковій точці. Нарешті, необхідно від цих приладних значень перейти до значень Хпр та Упр, які були б на лічильниках, якщо вісь абсцис умовної системи координат співпала б з напрямом АВ, як це встановлено для традиційного способу здійснення вивірки візирного пристрою. Виконаємо це за допомогою формул геометричного перетворення на площині, яке має назву поворот [3, cтop. 259]. Для цього треба знайти кут повороту CAB, тобто в. Визначивши за формулою (1) довжину сторони АВ, за теоремою синусів знаходять кути A і В MB sin(1 2 ), AB MA sin B sin(1 2 ). AB sin A 40 Згідно з фіг. 1, визначивши кути віз, і A, можна розрахувати дирекційний кут в в прийнятій умовній системі координат B віз А. 45 50 За відомим кутом в за допомогою формул геометричного перетворення - повороту визначимо приладні значення Хпр та Упр у системі координат, у якій вісь абсцис проходить через початкову А та кінцеву В точки маршруту, тобто значення після заїзду на лічильниках "X" та "Y" для випадку, коли динамічна вісь машини співпадала б з віссю візирного пристрою. За умови, що точка повороту має координати (0; 0), а кут повороту - в, шукані приладні координати будуть дорівнювати Xпр Х cos в Yпр sin в пр Yпр Х sin в Yпр cos в пр . (2) Після цього обчислюють традиційним способом значення непаралельності осі візирного пристрою до поздовжньої осі машини 2 UA 110454 U Y 1000 , (3) Xпр де Y - відхилення значення Yпр від нуля, яке може бути від'ємним і додатним. Визначивши на кінцевій точці візирним пристроєм значення віз(2) , і значення осі( 2) по шкалі 5 10 "КУРС", розраховують значення кута в повторно за формулою B осі( 2) віз( 2) B 180 . Далі, користуючись формулами (2) і (3), повторно обчислюють значення за результатами вимірювань на кінцевій точці. Таким чином, значення непаралельності осі візирного пристрою до динамічної осі машини визначають двічі за результатами одного заїзду. Визначення умовного економічного ефекту рішення, що пропонується. 1. Аналіз точності відомого та запропонованого способів. Точність відомого та запропонованого способів можна вважати рівною з наступних міркувань. Непаралельність візирної осі візира до динамічної осі машини, за умови руху машини вздовж умовної осі ОХ, визначають за формулою [1] 15 20 25 30 35 40 Y 1000 , X де Y - відхилення значення лічильника У від нульового значення; X - показ лічильника X, що фактично відповідає довжині мірної ділянки. На похибку визначення буде мати вплив точність вимірів візиром, необхідних для визначення умовного дирекційного кута поздовжньої осі машини, і точність визначення істинного значення Y , яка залежить від непаралельності візира до осі машини, від точності встановлення машини над початковою та кінцевою точками, а також точності встановлення нульового відліку та зчитування відліку по лічильнику "У". Розглянемо детально ці похибки. 1.1. Серединна похибка візування (наведення візира на кінцеву точку) Енав може бути визначена за формулою 120 (4) , 2Г де 120 - роздільна здатність ока людини; Eвіз х х Г - збільшення приладу; для візира складає 3,7 , для бусолі 8 . Обчислена за формулою (4) серединна похибка візування для візира складе 0,25 п.к. 1.2. Серединна похибка зняття відліку з наведеного візира Евідл; складе 1/4 ціни поділки приладу, тобто 0,25 п.к. 1.3. Серединна похибка встановлення машини над точкою складе 0,25 м; це значення визначено на підставі досвіду практичної роботи, а також граничним значенням похибки встановлення, зазначеним у керівних документах: 0,5 м. При довжині ділянки 1000 м це буде відповідати похибці за встановлення машини 0,25 п.к.; оскільки машину встановлюють над початковою та над кінцевою точками, цю похибку враховують двічі. 1.4. Похибка зчитування значення Y з лічильника У складе ¼ ціни поділки шкали, тобто 0,25 м. При довжині ділянки 1000 м це буде відповідати похибці Еу за встановлення машини 0,25 п.к., і для ділянки 500 м - 0,5 п.к. Ця похибка також входить двічі, оскільки на початковій точці встановлюють нульове значення, а на кінцевій - зчитують значення Y . Похибкою зчитування значення X з лічильника X внаслідок незначного впливу цієї похибки можна знехтувати. Перелічені вище похибки мають незалежний вплив на сумарну похибку, тому сумарну похибку визначення непаралельності візира до осі машини можна визначити за формулою 2 2 E Eвідл Eвіз 22 E2 0,252 0,252 2 0,252 2 0,252 0,6 п.к. уст Y 45 50 Отримане значення серединної похибки визначення непаралельності осі візира до динамічної осі машини відповідає встановленому керівними документами значенню граничної похибки - 0-02. Далі розглянемо систему похибок, що супроводжує визначення непаралельності візира способом, що пропонується. Для запропонованого способу похибка наведення та зняття відліку візиром увійде двічі, оскільки виміри проводять на кінцевій та початковій точці; похибки встановлення машини над початковою та кінцевою точкою будуть відсутні, а похибки за встановлення нульового відліку та зчитування відліку з лічильника У будуть складати 0,5 п.к., оскільки мірну ділянку зменшено удвічі. 3 UA 110454 U 2 2 E Eвідл Eвіз 22 E2 2 0,252 2 0,252 0,32 2 0,52 0,9 п.к. уст Y Оскільки визначення буде проводитися як для точки А, так і для точки В, отриману похибку 5 10 15 20 необхідно зменшити у 2 рази, тоді вона складе 0,6п.к. Це означає, що серединна похибка запропонованого способу не перевищує серединну похибку існуючого способу і також відповідає встановленій керівними документами граничній похибці 0-02. Зазначимо, що нами не було враховано вплив точності відпрацювання координат координатором (курсопрокладачем), оскільки для запропонованого та існуючого способів він є пропорційним до пройденої відстані і відповідно однаковим для оцінки кутового зміщення. 2. Аналіз часових показників, що характеризують проведення вивірки. При застосуванні запропонованого способу замість виміру довжини всієї мірної ділянки (1000 м) вимірюють довжину базису, на кінцях якого встановлюють кутомірні прилади (бусолі); довжина цього базису складе біля 200 м. Крім того, немає необхідності позначати початкову, кінцеву точки мірної ділянки, встановлювати створні та візирні віхи. З іншого боку, для запропонованого способу потрібен час на підготовку кутомірних приладів на кінцях баз до роботи. Час на підготовку приладів на кінцях базису не буде перевищувати часу позначення мірної ділянки. Це дозволяє зменшити час здійснення виміру з 15 хв. до 3 хв.; оскільки вимір виконують у прямому та зворотному напрямі, зменшення часу складе з 30 хв. до 6 хв. Загальний час на здійснення підготовки до вивірки складе: 30 хв. для традиційного способу (вмикання апаратури виконується паралельно з підготовкою ділянки для вивірки) і 15 хв. Для способу, що пропонується (час визначається терміном, необхідним на вмикання апаратури). Оскільки час безпосередньо на вивірку складає 15 хв., то загальний час буде складати 45 хв. для вивірки традиційною методикою і 30 хв. - за методикою, що пропонується. У цьому випадку виграш у часі складе Ш1 45 1,5. Ш2 30 25 30 35 40 Істотний виграш часу досягається, якщо на ділянці вивіряють не одну, а декілька машин: це відбувається за рахунок переходу від послідовного до паралельного способу роботи. При застосуванні відомого способу машини по черзі встановлюють над початковою точкою, готують візир до роботи, наводять на візирну віху на кінцевій точці, знімають відлік, приводять візир до похідного стану, обчислюють умовний дирекційний кут поздовжньої осі машини та встановлюють його по шкалі КУРС, переміщуються на кінцеву точку; після пробігу встановлюють машину точно над кінцевою точкою, зчитують по шкалам "X" та "У", від'їжджають зі створу "початкова точка - кінцева точка". Тільки після цього на початковій точці роботи починає виконувати наступна машина з моменту визначення відліку по кінцевій візирній осі. Орієнтовний час виконання пробігу з урахуванням виконання усіх вимірювальних робіт - 10 хв.; час підготовки навігаційної апаратури до роботи (може виконуватися паралельно) - 15 хв. Запропонований спосіб дозволяє паралельний спосіб роботи: машини знаходяться в колоні на початку маршруту вивірки, вмикають навігаційну апаратуру, встановлюють нульові значення на лічильниках "КУРС", "X", "У". У цей час на кінцях базису готують до роботи кутомірні прилади. Після цього знімають відліки з візира по цих кутомірних приладах, а з кутомірних приладів - по візирах машин. Таким чином, запропонований спосіб дозволяє зменшити час на виконання вивірки орієнтовно у 2 рази для підрозділу з двома машинами, і 3 рази для підрозділу з 4 машинами. Отже, у випадку вивірки двох машин виграш у часі складе Ш1 45 15 2. Ш2 30 45 50 У подальшому розглянемо випадок вивірки навігаційної апаратури для однієї машини як критичний для визначення економічної доцільності методики, що пропонується. 3. Аналіз зміни вартості. Для проведення вивірки за запропонованою методикою необхідно додатково залучити 2 бусолі ПАБ-2М. Вартість бусолі станом на 01.01.2016 р. складає ВПАБ=500 грн. [5]. Вартість одиниць озброєння, навігаційна апаратура якого вивіряється, складає: вартість топоприв'язника В1Т12=200 тис. грн., вартість базового пункту зі складу комплексу АЗК-7 BБП=300 тис. грн., вартість радіолокаційної станції ВРЛС=3 млн. грн., вартість рухомого розвідувального пункту - ВПРП=650 тис. грн. [5]. Таким чином, при залученні до вивірки бусолі вартість зразків озброєння збільшиться: у випадку топоприв'язника: B 2 200000 500 1,0025 , або B2 10025B1 . , B1 200000 у випадку РЛС: B 2 200000 500 1,00016 , або B2 100016B1 . , B1 200000 4 UA 110454 U 5 У подальшому розглянемо випадок вивірки топоприв'язника як критичний для визначення економічної доцільності методики, що пропонується. 4. Визначення умовного економічного ефекту рішення, що пропонується. Для визначення умовного економічного ефекту будемо розглядати наступні показники: Ш1, Ш2 - швидкодія, Т1, Т2 - точність та В1, В2 - вартість. Індекси 1 та 2 стосуються існуючої системи та тієї, що пропонується, відповідно. З попередніх міркувань робимо висновок, що Т1=Т2 та Ш1=0,67Ш2. З літератури [4] відоме співвідношення, що зв'язує ці параметри: T2 T1 10 B 2 (5) Ш1 K , Ш2 B1 де K - корегуючий коефіцієнт; у нашому випадку приймаємо його рівним одиниці. Тоді з (5) при T2 1 Ш1 1,5 маємо B2 1,5B1 . Іншими словами, для того, щоб досягнути T1 Ш2 підвищення швидкодії у 1,5 разу, необхідно зробити витрати B2 15B1 . Якщо прийняти B1 2 105 грн., то B 2 3 105 , 15 грн. Величина В* вартості запропонованої системи порівняно з B1 збільшиться на вартість ПАБ-2А, яка складає величину 500 грн. [5]. Тобто, маємо В* = В1+500. Незначне підвищення вартості апаратури системи, що запропоновано, дає B - умовний економічний ефект B B2 B*; B 3 105 (2 105 500); B 995 102. 20 25 30 35 40 45 50 Таким чином, застосування рішення, що запропоновано, дає умовний економічний ефект як мінімум 99 500 грн. на одну машину. 5. Додаткові фактори, що характеризують витрати на проведення вивірки відомою та запропонованою методикою. Вартості виконання робіт відомого та запропонованого способів стосовно витрат пального можна вважати рівними, якщо час на підготовку апаратури та пробіг не змінюється. Зазначимо, що коли зменшити довжину ділянки в 2 рази, відповідно до викладених у п.1 міркувань втрати точності не буде. Розрахунки показують, що зменшення ділянки в 2 рази дасть економію палива 7-10 %, оскільки основний розхід пального - робота двигуна під час підготовки апаратури до роботи. Крім того,якщо на одній вивірній ділянці вивіряють машини підрозділу, тобто декілька машин, то витрата пального для однієї машини більшою за рахунок того, що друга та наступні машини будуть чекати своєї черги з увімкненою навігаційною апаратурою та працюючим базовим двигуном відповідно. Це може призвести до перевитрат палива біля 20-35 % в залежності від кількості машин у підрозділі. Таким чином, для підрозділу, що має три-чотири машини з навігаційною апаратурою, застосування запропонованого способу дасть економію палива біля 25 %. Для застосування запропонованого способу немає необхідності використовувати додаткові матеріальні засоби, за виключенням бусолі ПАБ-2М. В той же час, для відомого способу необхідно мати комплект для позначення мірної ділянки, виготовлення якого потребує додаткових коштів. Джерела інформації: 1. Будова та експлуатація топогеодезичних приладів і апаратури ракетних військ і артилерії: Курс лекцій. - Львів: АСВ, 2010. - 237 с. 2. Сергієнко Р.В./ Оцінка непаралельності візувальної осі візира до динамічної осі машини методом заїзду між двома пунктами геодезичної мережі /Військово-технічний вісник. - Львів: АСВ, 2013. - № 8. С. 77-80. 3. Гусев В.А. / Геометрия. Полный справочник. // В.А. Гусев, И.Б. Кожухов, А.А. Прокофьев / М.: Махаон, 2006. -320 с. - (Для школьников и абитуриентов). 4. Производственно-технический сборник "Обмен опытом в радиопромышленности", вып. 7., М: 1980 г., стр. 10-12. 5. Перелік первинної вартості майна за основною номенклатурою Головного ракетноартилерійського управління Озброєння Міністерства оборони України, введений в дію наказом командира в/ч А0120 від 12.12.2001 р. № 158 (зі змінами від 03.11.2004 р). 55 5 UA 110454 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 Спосіб визначення кута непаралельності візирної осі візирного пристрою до динамічної осі машини, який відрізняється тим, що перпендикулярне до напряму руху зміщення машини визначається через різницю приладного значення та значення, визначеного засічкою кутомірними приладами, встановленими на базисі. Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01B 11/26, G01S 5/16
Мітки: машини, кута, визначення, візирного, пристрою, непаралельності, осі, візирної, спосіб, динамічної
Код посилання
<a href="https://ua.patents.su/8-110454-sposib-viznachennya-kuta-neparalelnosti-vizirno-osi-vizirnogo-pristroyu-do-dinamichno-osi-mashini.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення кута непаралельності візирної осі візирного пристрою до динамічної осі машини</a>
Датчик візирного кута
Номер патенту: 68885
Опубліковано: 10.04.2012
Автори: Живцова Людмила Іванівна, Рижков Ігор Вікторович, Ковшов Геннадій Миколайович
МПК: E21B 47/02
Мітки: кута, датчик, візирного
Формула / Реферат:
Датчик візирного кута, що містить корпус, трубку, наповнену рідиною, на кінцях якої встановлені пружні мембрани із закріпленими на них перетворювачами сили і безконтактними датчиками переміщення, який відрізняється тим, що він оснащений додатковою трубкою з рідиною, розміщеною під кутом 90° до існуючої, при цьому обидві трубки мають однаковий розмір, розташовані перпендикулярно осі чутливості та біфілярно укладені в декілька шарів.
Спосіб визначення граничного кута поперечної статичної стійкості колісної машини з балансирною підвіскою одного з мостів ходової частини та напівпричіпної машини з застосуванням аналітичного моделювання
Номер патенту: 105991
Опубліковано: 10.07.2014
Автори: Лілевман Олександр Йосипович, Подольський Михайло Ігорович, Кучеренко Володимир Григорович, Лілевман Ігор Йосипович, Митрофанов Олександр Петрович
МПК: G01M 17/00, G01M 1/00
Мітки: поперечної, ходової, моделювання, кута, визначення, аналітичного, машини, колісної, мостів, граничного, стійкості, одного, підвіскою, балансирною, застосуванням, статичної, спосіб, частини, напівпричіпної
Формула / Реферат:
Спосіб визначення граничного кута поперечної статичної стійкості колісної машини з балансирною підвіскою одного з мостів ходової частини та напівпричіпної машини з застосуванням аналітичного моделювання, який полягає у визначенні кутів між горизонтальною площиною і площиною опори машини, при яких машина переходить у стан нестійкої рівноваги в результаті її поперечного нахилу на лівий бік та нахилу на правий бік і виборі найменшого з кутів як...
Пристрій для визначення кута закручування рами мобільної машини
Номер патенту: 63398
Опубліковано: 10.10.2011
Автори: Бабій Андрій Васильович, Попович Павло Васильович, Довбуш Тарас Анатолійович, Рибак Тимофій Іванович
МПК: G01L 1/00
Мітки: кута, рами, мобільної, закручування, пристрій, машини, визначення
Формула / Реферат:
Пристрій для визначення кута закручування рами мобільної машини, що складається з двох захватів, які одними кінцями приєднано до несучих елементів рами мобільної машини, а іншими через з'єднувальні елементи з'єднано з подовжувачами, на кінцях яких змонтовано чутливий елемент, який відрізняється тим, що з'єднувальні елементи виконані у вигляді болтових фіксаторів з можливістю утворення нерухомого фрикційного з'єднання для фіксації...
Спосіб визначення зенітного і візирного кутів
Номер патенту: 109122
Опубліковано: 10.08.2016
Автори: Живцова Людмила Іванівна, Рижков Ігор Вікторович, Ковшов Геннадій Миколайович
МПК: G01C 9/00, E21B 47/02
Мітки: зенітного, кутів, визначення, візирного, спосіб
Формула / Реферат:
Спосіб визначення зенітного і візирного кутів, що включає установку в корпусі перетворювача трьох ортогональних маятників з датчиками кутових переміщень, вимірювання сигналів з датчиків, селективний відбір їх значень, який відрізняється тим, що апріорно вимірюють параметри (i,j = 1, 2, 3) - кутові відхилення осей чутливості первинних перетворювачів щодо корпусу,
Спосіб динамічної оцінки післяопераційного набряку м’яких тканин у ділянці щоки і кута нижньої щелепи
Номер патенту: 104391
Опубліковано: 25.01.2016
Автори: Винарчук-Патерега Віра Василівна, Мокрик Олег Ярославович, Патерега Надія Ігорівна, Огоновський Роман Зіновійович, Сороківський Іван Степанович
МПК: A61B 5/107
Мітки: щоки, м'яких, післяопераційного, щелепи, ділянці, оцінки, спосіб, нижньої, набряку, тканин, динамічної, кута
Формула / Реферат:
Спосіб динамічної оцінки післяопераційного набряку м'яких тканин у ділянці щоки і кута нижньої щелепи, що включає вимірювання довжини відрізків від кута нижньої щелепи до зовнішнього кута ока, крила носа, кута рота і підборіддя, який відрізняється тим, що для пацієнта перед операцією виготовляють прозорий індивідуальний трафарет, на якому позначають лінії від кута нижньої щелепи до зовнішнього кута ока, до крила носа, до кута рота, до...
Попередній патент: Похідні 1,2,4-триазолів, що стимулюють ріст соняшнику
Наступний патент: Система повного блокування підвіски бойової машини
Випадковий патент: Спосіб формування опорно-рухової кукси у хворих після евісцерації очного яблука з приводу травм і в'ялоперебігаючих увеїтів