Спосіб визначення зенітного і візирного кутів
Номер патенту: 109122
Опубліковано: 10.08.2016
Автори: Рижков Ігор Вікторович, Ковшов Геннадій Миколайович, Живцова Людмила Іванівна

Формула / Реферат
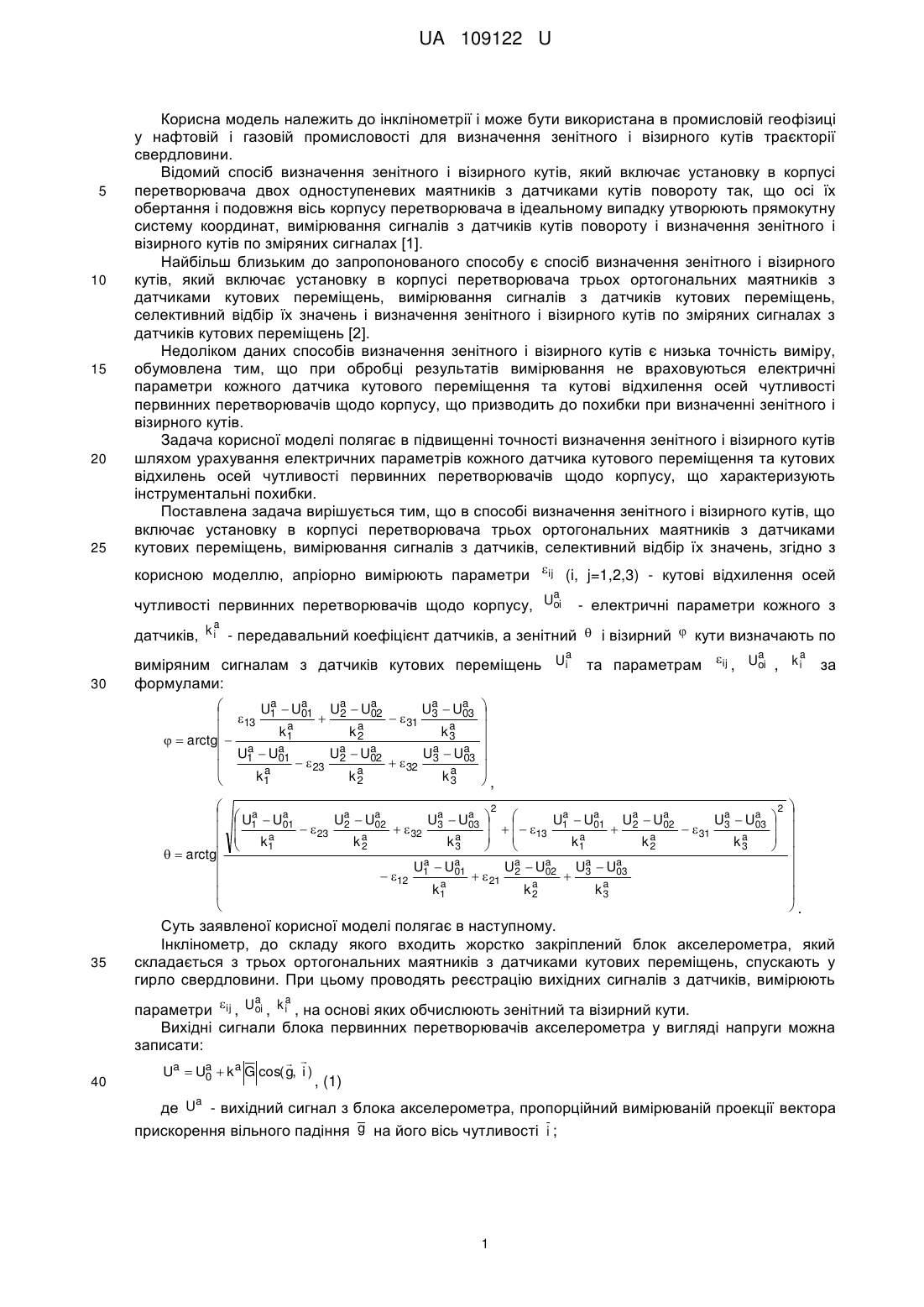
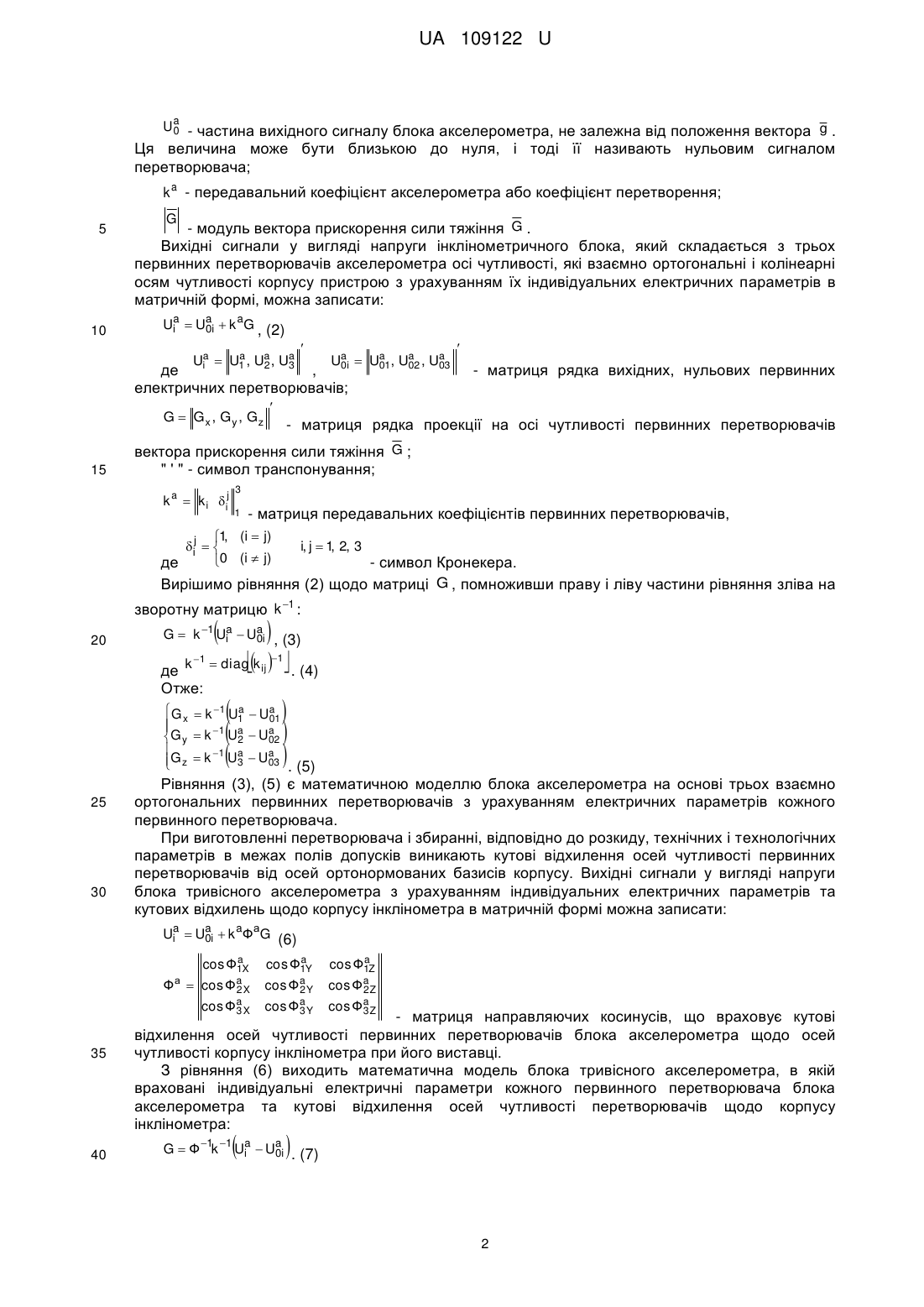
Спосіб визначення зенітного і візирного кутів, що включає установку в корпусі перетворювача трьох ортогональних маятників з датчиками кутових переміщень, вимірювання сигналів з датчиків, селективний відбір їх значень, який відрізняється тим, що апріорно вимірюють параметри ![]() (i,j = 1, 2, 3) - кутові відхилення осей чутливості первинних перетворювачів щодо корпусу,
(i,j = 1, 2, 3) - кутові відхилення осей чутливості первинних перетворювачів щодо корпусу, ![]() - електричні параметри кожного з датчиків,
- електричні параметри кожного з датчиків, ![]() - передавальний коефіцієнт датчиків, а зенітний
- передавальний коефіцієнт датчиків, а зенітний ![]() і візирний
і візирний ![]() кути визначають по виміряним сигналам з датчиків кутових переміщень
кути визначають по виміряним сигналам з датчиків кутових переміщень ![]() та параметрам
та параметрам ![]() ,
, ![]() ,
, ![]() за формулами:
за формулами:
 ,
,
 .
.
Текст
Реферат: Спосіб визначення зенітного і візирного кутів включає установку в корпусі перетворювача трьох ортогональних маятників з датчиками кутових переміщень, вимірювання сигналів з датчиків, селективний відбір їх значень. При цьому апріорно вимірюють параметри ij (i,j = 1, 2, 3) - кутові відхилення осей чутливості первинних перетворювачів щодо корпусу, Uai 0 параметри кожного з датчиків, k ia - електричні - передавальний коефіцієнт датчиків, а зенітний і візирний кути визначають по виміряним сигналам p датчиків кутових переміщень Uia та параметрам ij , Uai , k ia . 0 UA 109122 U (12) UA 109122 U UA 109122 U 5 10 15 20 25 Корисна модель належить до інклінометрії і може бути використана в промисловій геофізиці у нафтовій і газовій промисловості для визначення зенітного і візирного кутів траєкторії свердловини. Відомий спосіб визначення зенітного і візирного кутів, який включає установку в корпусі перетворювача двох одноступеневих маятників з датчиками кутів повороту так, що осі їх обертання і подовжня вісь корпусу перетворювача в ідеальному випадку утворюють прямокутну систему координат, вимірювання сигналів з датчиків кутів повороту і визначення зенітного і візирного кутів по зміряних сигналах [1]. Найбільш близьким до запропонованого способу є спосіб визначення зенітного і візирного кутів, який включає установку в корпусі перетворювача трьох ортогональних маятників з датчиками кутових переміщень, вимірювання сигналів з датчиків кутових переміщень, селективний відбір їх значень і визначення зенітного і візирного кутів по зміряних сигналах з датчиків кутових переміщень [2]. Недоліком даних способів визначення зенітного і візирного кутів є низька точність виміру, обумовлена тим, що при обробці результатів вимірювання не враховуються електричні параметри кожного датчика кутового переміщення та кутові відхилення осей чутливості первинних перетворювачів щодо корпусу, що призводить до похибки при визначенні зенітного і візирного кутів. Задача корисної моделі полягає в підвищенні точності визначення зенітного і візирного кутів шляхом урахування електричних параметрів кожного датчика кутового переміщення та кутових відхилень осей чутливості первинних перетворювачів щодо корпусу, що характеризують інструментальні похибки. Поставлена задача вирішується тим, що в способі визначення зенітного і візирного кутів, що включає установку в корпусі перетворювача трьох ортогональних маятників з датчиками кутових переміщень, вимірювання сигналів з датчиків, селективний відбір їх значень, згідно з корисною моделлю, апріорно вимірюють параметри ij (i, j=1,2,3) - кутові відхилення осей a чутливості первинних перетворювачів щодо корпусу, Uoi датчиків, 30 k ia - передавальний коефіцієнт датчиків, а зенітний і візирний кути визначають по a a a виміряним сигналам з датчиків кутових переміщень Ui та параметрам ij , Uoi , k i за формулами: a a a a a a U1 U01 U2 U02 U3 U03 13 31 a a a k1 k2 k3 arctg a a a a a U U U Ua U1 U01 23 2 a 02 32 3 a 03 a k1 k2 k3 arctg 35 - електричні параметри кожного з a U1 Ua Ua Ua Ua Ua 01 23 2 a 02 32 3 a 03 a k1 k2 k3 12 a U1 Ua 01 a k1 , 2 a a a a a a U1 U01 U2 U02 U3 U03 13 31 a k1 ka ka 2 3 21 Ua Ua 2 02 ka 2 Ua Ua 3 03 ka 3 2 . Суть заявленої корисної моделі полягає в наступному. Інклінометр, до складу якого входить жорстко закріплений блок акселерометра, який складається з трьох ортогональних маятників з датчиками кутових переміщень, спускають у гирло свердловини. При цьому проводять реєстрацію вихідних сигналів з датчиків, вимірюють a a параметри ij , Uoi , k i , на основі яких обчислюють зенітний та візирний кути. Вихідні сигнали блока первинних перетворювачів акселерометра у вигляді напруги можна записати: 40 Ua Ua k a G cos( g, i ) 0 , (1) a де U - вихідний сигнал з блока акселерометра, пропорційний вимірюваній проекції вектора прискорення вільного падіння g на його вісь чутливості i ; 1 UA 109122 U Ua - частина вихідного сигналу блока акселерометра, не залежна від положення вектора g . 0 Ця величина може бути близькою до нуля, і тоді її називають нульовим сигналом перетворювача; k a - передавальний коефіцієнт акселерометра або коефіцієнт перетворення; 5 10 G - модуль вектора прискорення сили тяжіння G . Вихідні сигнали у вигляді напруги інклінометричного блока, який складається з трьох первинних перетворювачів акселерометра осі чутливості, які взаємно ортогональні і колінеарні осям чутливості корпусу пристрою з урахуванням їх індивідуальних електричних параметрів в матричній формі, можна записати: Uia Uai k aG , (2) 0 a Uia U1 , Ua , Ua 2 3 Uai Ua , Ua , Ua 0 01 02 03 де , електричних перетворювачів; G G x , G y , Gz 15 - матриця рядка вихідних, нульових первинних - матриця рядка проекції на осі чутливості первинних перетворювачів вектора прискорення сили тяжіння G ; " ' " - символ транспонування; k a k i ij 3 1 - матриця передавальних коефіцієнтів первинних перетворювачів, , 1 (i j) ij 0 (i j) де i, j 1 2, 3 , - символ Кронекера. Вирішимо рівняння (2) щодо матриці G , помноживши праву і ліву частини рівняння зліва на зворотну матрицю k 1 : 20 G k 1 Uia Uai , (3) 0 1 де k diag k ij . (4) Отже: 1 a G x k 1 U1 Ua 01 1 a a G y k U2 U02 1 a a G z k U3 U03 . (5) 25 30 Рівняння (3), (5) є математичною моделлю блока акселерометра на основі трьох взаємно ортогональних первинних перетворювачів з урахуванням електричних параметрів кожного первинного перетворювача. При виготовленні перетворювача і збиранні, відповідно до розкиду, технічних і технологічних параметрів в межах полів допусків виникають кутові відхилення осей чутливості первинних перетворювачів від осей ортонормованих базисів корпусу. Вихідні сигнали у вигляді напруги блока тривісного акселерометра з урахуванням індивідуальних електричних параметрів та кутових відхилень щодо корпусу інклінометра в матричній формі можна записати: Uia Uai k aФаG (6) 0 а Ф 35 40 a cos Ф1X a cos Ф1Y a cos Ф1Z cos Ф a X 2 cos Ф a X 3 cos Ф a Y 2 cos Ф a Y 3 cos Ф a Z 2 cos Ф a Z 3 - матриця направляючих косинусів, що враховує кутові відхилення осей чутливості первинних перетворювачів блока акселерометра щодо осей чутливості корпусу інклінометра при його виставці. З рівняння (6) виходить математична модель блока тривісного акселерометра, в якій враховані індивідуальні електричні параметри кожного первинного перетворювача блока акселерометра та кутові відхилення осей чутливості перетворювачів щодо корпусу інклінометра: G Ф 1k 1 Uia Uai . (7) 0 2 UA 109122 U Матриця направляючих косинусів Фа , якщо вважати, що кутові відхилення осей чутливості первинних перетворювачів, позначені через , малі, тобто sin , cos 1 , прийме вигляд: 13 12 1 31 1 Фа 23 32 21 1 . 1 Зворотна матриця Ф , що є ортогональною Фа , знайдеться як транспонована їй, 5 1 враховуючи, що Ф Ф E , Е - одинична матриця: 13 1 Ф 1 23 32 12 1 31 21 1 , де ij (i, j=1,2,3), i- номер первинного перетворювача, j - поворот навколо першої, другої або третьої осі. Таким чином: 10 Ua Ua Ua Ua Ua Ua G x 1 a 01 23 2 a 02 32 3 a 03 k1 k2 k3 a U1 Ua Ua Ua Ua Ua 01 2 a 02 31 3 a 03 G y 13 a k1 k2 k3 a U1 Ua Ua Ua Ua Ua 01 G z 12 21 2 a 02 3 a 03 a k1 k2 k3 . Отже, зенітний та візирний кути обчислюються, згідно з формулами: a a a a a a U1 U01 U2 U02 U3 U03 13 31 a a a k1 k2 k3 arctg a a a a a U U U Ua U1 U01 23 2 a 02 32 3 a 03 a k1 k2 k3 arctg 15 20 25 a U1 Ua Ua Ua Ua Ua 01 23 2 a 02 32 3 a 03 a k1 k2 k3 12 a U1 Ua 01 a k1 , 2 a a a a a a U1 U01 U2 U02 U3 U03 31 a a a 13 k1 k2 k3 21 Ua Ua 2 02 ka 2 Ua Ua 3 03 ka 3 2 . Завдяки способу визначення зенітного та візирного кутів з урахуванням індивідуальних електричних параметрів первинних перетворювачів блока акселерометра та кутових відхилень осей чутливості щодо корпусу інклінометра можливо на порядок підвищити точність вимірювання в процесі проведення бурових робіт. Джерела інформації: 6 1. Описание изобретения к патенту РФ 2121573, МПК Е21В 47/02 Способ определения зенитного и визирного углов / Г.В. Миловзоров; заявитель и патентообладатель Уфимский государственный авиационный технический университет - № 97105430/03; заявл. 07.04.97; опубл. 10.1 1.98, Бюл. № 6 2. Описание изобретения к патенту РФ 2121574, МПК Е21В 47/02 Способ определения зенитного и визирного углов / Г. В. Миловзоров; заявитель и патентообладатель Уфимский государственный авиационный технический университет - № 97105431/03; заявл. 07.04.97; опубл. 10.1 1.98, Бюл. № ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 Спосіб визначення зенітного і візирного кутів, що включає установку в корпусі перетворювача трьох ортогональних маятників з датчиками кутових переміщень, вимірювання сигналів з датчиків, селективний відбір їх значень, який відрізняється тим, що апріорно вимірюють параметри ij (i,j = 1, 2, 3) - кутові відхилення осей чутливості первинних перетворювачів щодо 3 UA 109122 U корпусу, Uai - електричні параметри кожного з датчиків, k ia - передавальний коефіцієнт 0 датчиків, а зенітний і візирний кути визначають по виміряним сигналам з датчиків кутових переміщень Uia та параметрам ij , Uai , k ia за формулами: 0 a a a a a a 13 U1 U01 U2 U02 31 U3 U03 a k1 ka ka 2 3 arctg a a a a a a U1 U01 U2 U02 U3 U03 23 32 a k1 ka ka 2 3 5 arctg , 2 a a a a a a a a a U1 Ua Ua Ua 01 2 02 U3 U03 U1 U01 U2 U02 U3 U03 23 32 13 31 a ka ka ka k1 ka ka 1 2 3 2 3 a a a a a a U U U U U U 12 1 a 01 21 2 a 02 3 a 03 k1 k2 k3 2 . Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: E21B 47/02, G01C 9/00
Мітки: кутів, зенітного, візирного, спосіб, визначення
Код посилання
<a href="https://ua.patents.su/6-109122-sposib-viznachennya-zenitnogo-i-vizirnogo-kutiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення зенітного і візирного кутів</a>
Датчик зенітного і візирного кутів
Номер патенту: 68884
Опубліковано: 10.04.2012
Автори: Живцова Людмила Іванівна, Рижков Ігор Вікторович, Ковшов Геннадій Миколайович
МПК: E21B 47/02
Мітки: візирного, датчик, кутів, зенітного
Формула / Реферат:
Датчик зенітного і візирного кутів, що містить циліндричний корпус, усередині якого жорстко закріплені три циліндричні спіральні трубки, заповнені рідинами, що не змішуються, який відрізняється тим, що дві трубки розташовані в площині осі чутливості перпендикулярно одна до одної, а третя - під кутом 90° до осі чутливості, при цьому всі вони мають однаковий розмір, укладені біфілярно в декілька шарів перпендикулярно осі чутливості та з'єднані...
Датчик зенітного і візирного кутів
Номер патенту: 78852
Опубліковано: 10.04.2013
Автори: Ковшов Геннадій Миколайович, Живцова Людмила Іванівна, Рижков Ігор Вікторович
МПК: E21B 47/022
Мітки: візирного, кутів, датчик, зенітного
Формула / Реферат:
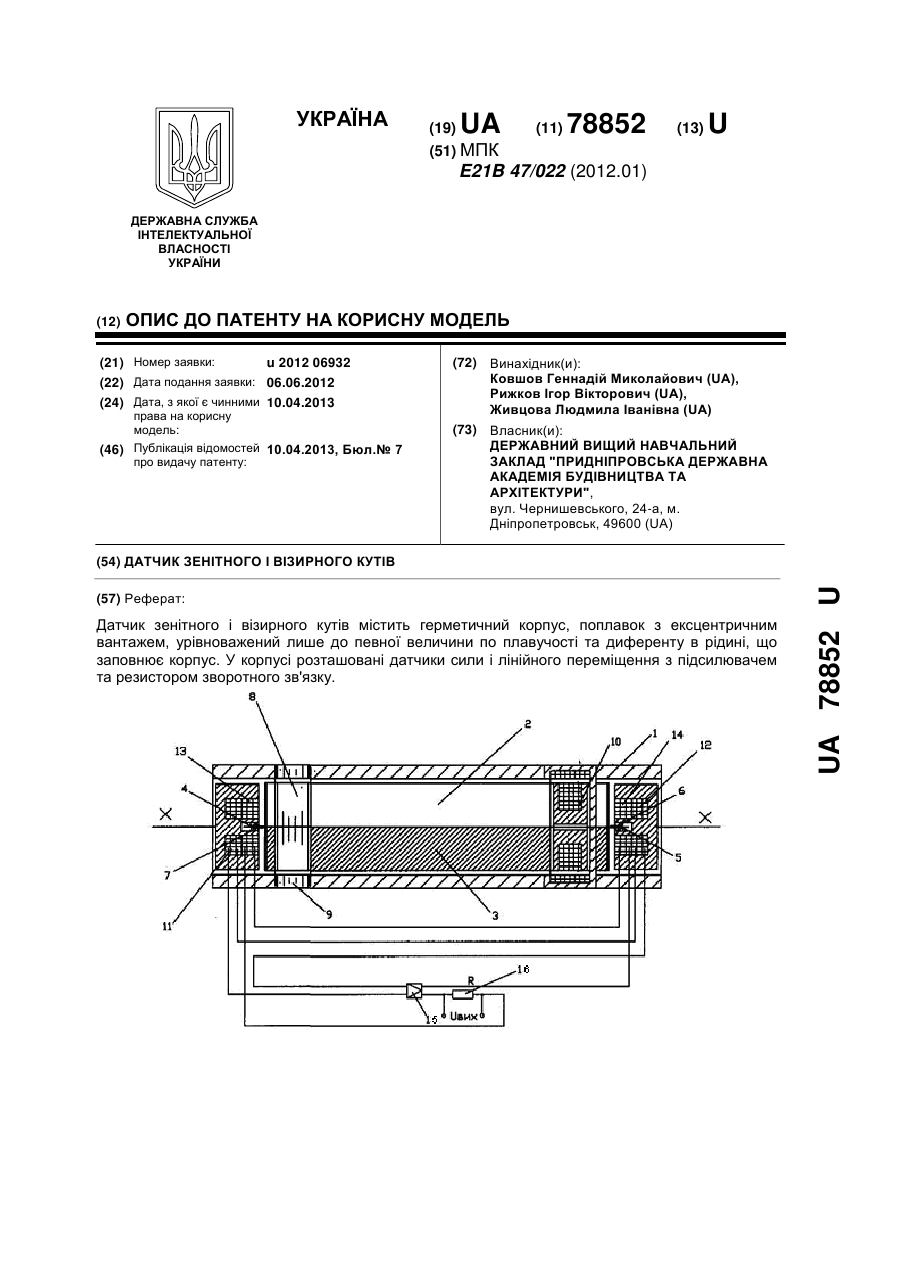
Датчик зенітного і візирного кутів, що містить герметичний корпус, поплавок з ексцентричним вантажем, урівноважений по плавучості та диференту в рідині, що заповнює корпус, який відрізняється тим, що поплавок по плавучості урівноважений лише до певної величини, а в корпусі додатково розташовані датчики сили і лінійного переміщення з підсилювачем та резистором зворотного зв'язку.
Спосіб визначення кутів зеніту і візира
Номер патенту: 63188
Опубліковано: 26.09.2011
Автори: Рижков Ігор Вікторович, Ковшов Геннадій Миколайович, Живцова Людмила Іванівна
МПК: E21B 47/00
Мітки: спосіб, кутів, визначення, візира, зеніту
Формула / Реферат:
Спосіб визначення кутів зеніту і візиру, що включає встановлення в корпус перетворювача трьох ортогональних маятників з датчиками кутових переміщень з орієнтацією осі обертання третього маятника уздовж осі корпусу, вимірювання сигналів з датчиків, селективний відбір цих сигналів з подальшим розрахунком кутів зеніту і візира, який відрізняється тим, що кути зеніту і візира...
Датчик візирного кута
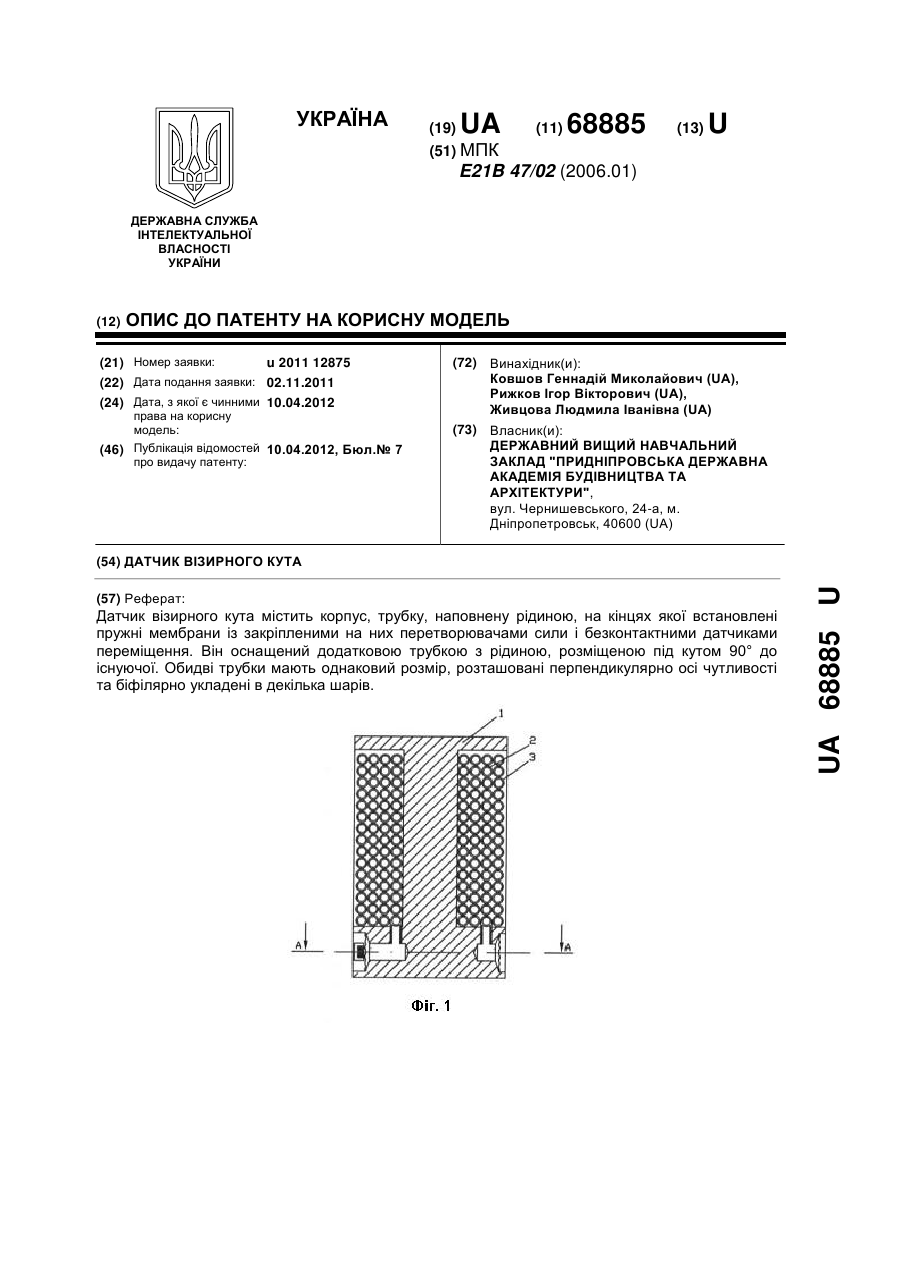
Номер патенту: 68885
Опубліковано: 10.04.2012
Автори: Ковшов Геннадій Миколайович, Рижков Ігор Вікторович, Живцова Людмила Іванівна
МПК: E21B 47/02
Мітки: кута, датчик, візирного
Формула / Реферат:
Датчик візирного кута, що містить корпус, трубку, наповнену рідиною, на кінцях якої встановлені пружні мембрани із закріпленими на них перетворювачами сили і безконтактними датчиками переміщення, який відрізняється тим, що він оснащений додатковою трубкою з рідиною, розміщеною під кутом 90° до існуючої, при цьому обидві трубки мають однаковий розмір, розташовані перпендикулярно осі чутливості та біфілярно укладені в декілька шарів.
Датчик зенітного кута для вимірювання скривлення свердловин
Номер патенту: 7780
Опубліковано: 15.07.2005
Автори: Садовникова Олександра Володимирівна, Ковшов Генадій Миколайович
МПК: E21B 47/02
Мітки: зенітного, датчик, вимірювання, кута, скривлення, свердловин
Формула / Реферат:
Датчик зенітного кута для вимірювання скривлення свердловин, що містить корпус, спірально укладену трубку, заповнену рідиною, який відрізняється тим, що виходи трубки розвернуті в протилежні сторони і з'єднані з порожнинами, оснащеними мембранами, на яких закріплені рухомі елементи безконтактних датчиків сили і переміщення.
Попередній патент: Електромагнітний вантажозахватний пристрій
Наступний патент: Індукційний пристрій для термічної обробки зварених стиків залізничних рейок
Випадковий патент: Вузол з'єднання деталей для механічних моделей