Спосіб визначення пропускної здатності ділянки доріг

Формула / Реферат
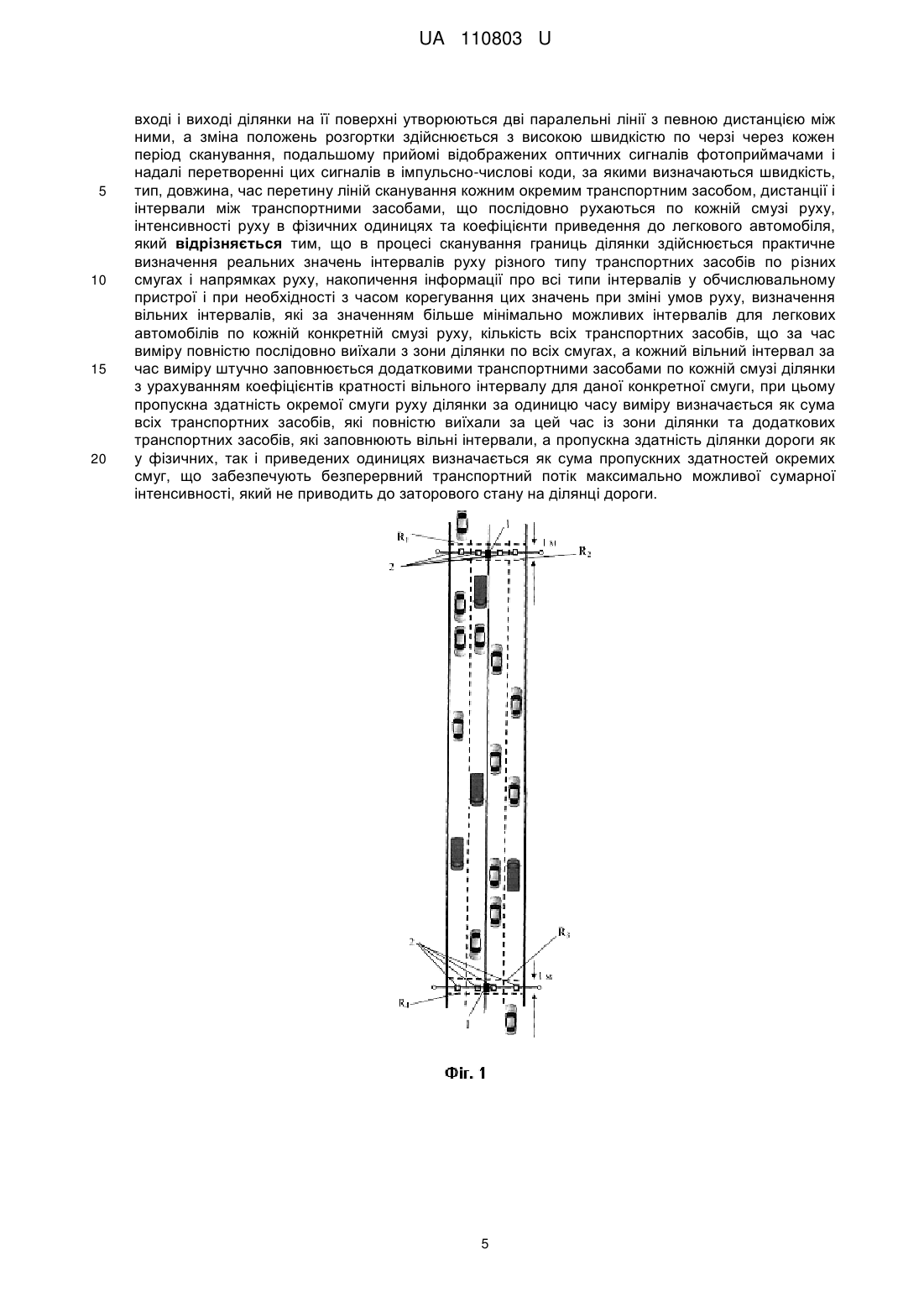
Спосіб визначення пропускної здатності ділянки доріг, який заснований на скануванні одночасно двома гостроспрямованими лазерними променями вхідних і вихідних меж ділянки з точки, що відповідає середині проїжджої частини, причому забезпечується відхилення осі кожного лазерного променя в необхідне друге положення, при якому у поперечному розрізі дороги на вході і виході ділянки на її поверхні утворюються дві паралельні лінії з певною дистанцією між ними, а зміна положень розгортки здійснюється з високою швидкістю по черзі через кожен період сканування, подальшому прийомі відображених оптичних сигналів фотоприймачами і надалі перетворенні цих сигналів в імпульсно-числові коди, за якими визначаються швидкість, тип, довжина, час перетину ліній сканування кожним окремим транспортним засобом, дистанції і інтервали між транспортними засобами, що послідовно рухаються по кожній смузі руху, інтенсивності руху в фізичних одиницях та коефіцієнти приведення до легкового автомобіля, який відрізняється тим, що в процесі сканування границь ділянки здійснюється практичне визначення реальних значень інтервалів руху різного типу транспортних засобів по різних смугах і напрямках руху, накопичення інформації про всі типи інтервалів у обчислювальному пристрої і при необхідності з часом корегування цих значень при зміні умов руху, визначення вільних інтервалів, які за значенням більше мінімально можливих інтервалів для легкових автомобілів по кожній конкретній смузі руху, кількість всіх транспортних засобів, що за час виміру повністю послідовно виїхали з зони ділянки по всіх смугах, а кожний вільний інтервал за час виміру штучно заповнюється додатковими транспортними засобами по кожній смузі ділянки з урахуванням коефіцієнтів кратності вільного інтервалу для даної конкретної смуги, при цьому пропускна здатність окремої смуги руху ділянки за одиницю часу виміру визначається як сума всіх транспортних засобів, які повністю виїхали за цей час із зони ділянки та додаткових транспортних засобів, які заповнюють вільні інтервали, а пропускна здатність ділянки дороги як у фізичних, так і приведених одиницях визначається як сума пропускних здатностей окремих смуг, що забезпечують безперервний транспортний потік максимально можливої сумарної інтенсивності, який не приводить до заторового стану на ділянці дороги.
Текст
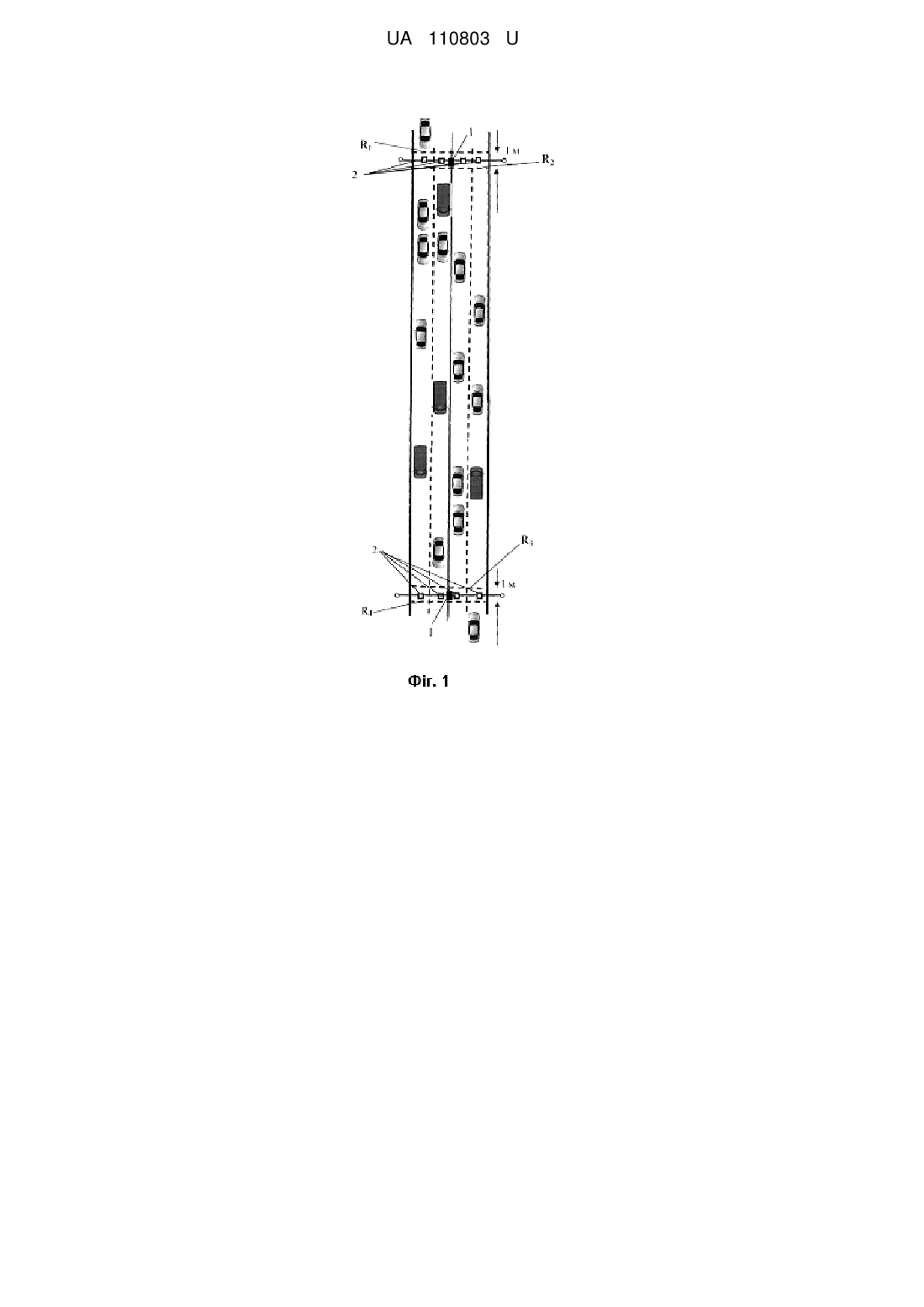
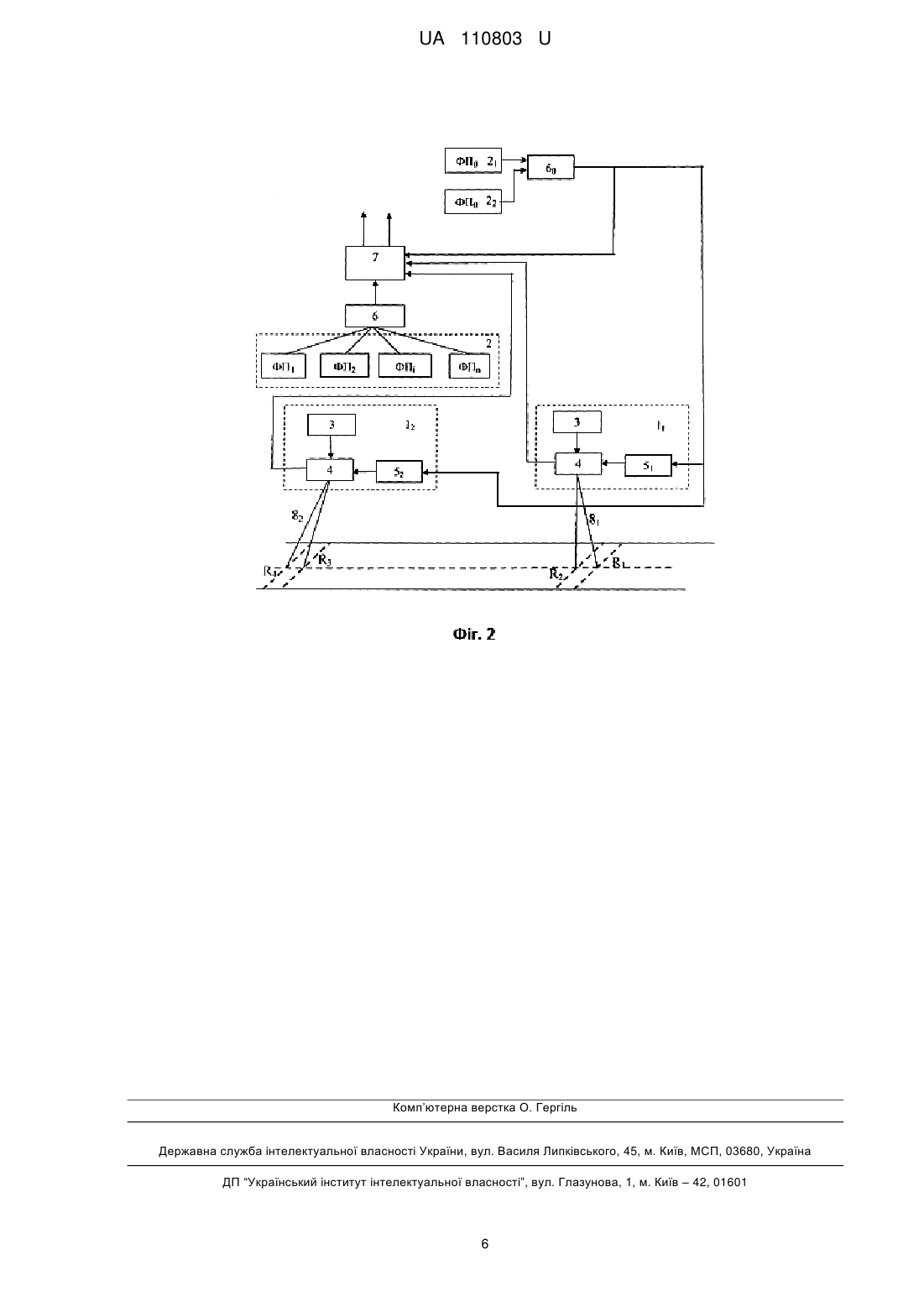
Реферат: Спосіб визначення пропускної здатності ділянки доріг заснований на скануванні одночасно двома гостроспрямованими лазерними променями вхідних і вихідних меж ділянки з точки, що відповідає середині проїжджої частини, причому забезпечується відхилення осі кожного лазерного променя в необхідне друге положення, при якому у поперечному розрізі дороги на вході і виході ділянки на її поверхні утворюються дві паралельні лінії з певною дистанцією між ними, а зміна положень розгортки здійснюється з високою швидкістю по черзі через кожен період сканування, подальшому прийомі відображених оптичних сигналів фотоприймачами і надалі перетворенні цих сигналів в імпульсно-числові коди, за якими визначаються швидкість, тип, довжина, час перетину ліній сканування кожним окремим транспортним засобом, дистанції і інтервали між транспортними засобами, що послідовно рухаються по кожній смузі руху, інтенсивності руху в фізичних одиницях та коефіцієнти приведення до легкового автомобіля. UA 110803 U (54) СПОСІБ ВИЗНАЧЕННЯ ПРОПУСКНОЇ ЗДАТНОСТІ ДІЛЯНКИ ДОРІГ UA 110803 U UA 110803 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до систем регулювання дорожнього руху (ДР) і може бути використана при розробці агрегатної системи засобів управління ДР, при розробці АСУ-ДР, в системах інформаційного забезпечення завантаження ділянок доріг вулично-дорожньої мережі (ВДМ), а також для підвищення ефективності управління рухом транспорту на ділянках доріг. Цей спосіб може бути використаний для одночасного визначення основних параметрів транспортних потоків (ТП): моменту проїзду транспортним засобом (ТЗ) входу і виходу контрольованої зони (КЗ), швидкості, типу і напрямків руху ТЗ, їх інтенсивності руху в фізичних та приведених одиницях по кожній смузі за будь-який проміжок часу, інтервалів руху і дистанції між ТЗ, одночасної кількості ТЗ на контрольованій ділянці дороги та коефіцієнтів приведення до легкового ТЗ. Відомий спосіб визначення пропускної здатності (ПЗ) регульованого перехрестя, заснований на скануванні одночасно трьома гостроспрямованими лазерними променями зони перехрестя в точці над його геометричним центром конусним видом розгортки, причому оптична вісь одного з положень розгортки першого променя вибирається так, щоб він описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а друге положення розгортки відповідало відхиленню лазерного променя, при якому радіус другого концентричного кола на поверхні проїзної частини зменшується на певну задану величину, при цьому зміна положень розгортки здійснюється з високою швидкістю по черзі через кожен період сканування. Другий оптичний промінь лазерної розгортки формується зі зміщенням на 120° по колу розгортки і формує вхідну межу першої КЗ. Цей промінь, як і перший, за допомогою відповідного дискретного сканістора на кожному наступному періоді сканування змінює одну оптичну вісь розгортки (з радіусом кола R 3 , на проїжджій частині перехрестя) на іншу (з радіусом кола R 4 ) і формує два концентричних кола з різницею радіусів R4 R3 1 м. Третій оптичний промінь лазерної розгортки формується зі зміщенням по відношенню до другого ще на 120° по колу розгортки і формує вхідну межу другої КЗ. Цей промінь, як і обидва інші, за допомогою відповідного дискретного сканістора на кожному наступному періоді сканування змінює одну оптичну вісь розгортки (з радіусом кола R 5 на проїжджій частині перехрестя) на іншу (з радіусом кола R 6 ) і формує два концентричних кола також з різницею радіусів R6 R5 1 м. Оптичні фотоприймачі в процесі розгортки лазерних променів по одному з кіл на входах і виходах КЗ послідовно сприймають сигнали, відбиті від ТЗ, що рухаються по різним смугам руху як на підходах, так і на виходах перехрестя. Фіксацію ТЗ, що в'їжджають в обидві КЗ, здійснюють по їх передніх бамперах при пересіченні одного з кіл (наприклад R 6 або R 4 ), при цьому завдяки періодичному скануванню зі зміною оптичної осі лазерного променя (з радіуса R 3 на R 4 і навпаки та з R 5 на R 6 ) визначаються момент в'їзду, швидкість, довжина, тип, кількість і послідовність ТЗ, що реально в'їхали в КЗ по кожній смузі руху за період вимірювань. Радіус R 3 , що формує вхідну межу першої КЗ, вибирають за такої умови, щоб відстань між R 3 та R1 відповідала (з урахуванням реальної відстані, на якій водій реагує на зміну сигналу світлофора) максимальному з можливих зупиночному шляху (ЗШ) різного типу ТЗ, що перетинають вхідну межу першої КЗ з максимально дозволеною швидкістю (60 км/год.). Наявність подвійного сканування ( R 3 , R 4 ) на вході першої КЗ дає можливість точно визначити тип ТЗ, склад ТП та кількість ТЗ mj у черзі по кожній j-й смузі руху на підходах до перехрестя на момент зміни сигналу світлофора на зелений або на момент початку руху перших у черзі ТЗ. Крім цього, це дозволяє визначити швидкість ТЗ на вході в першу КЗ на момент зміни сигналу світлофора з зеленого на жовтий і по швидкості та типу ТЗ розрахувати його ЗШ та прийняти рішення про завершення проміжного такту (ПТ). Подвійне сканування третім променем ( R 5 , R 6 ) на вході в другу КЗ дозволяє визначити тип, точний час та кількість ТЗ, що в'їхали в цю КЗ по кожній зі смуг руху і послідовно визначити реальні значення коефіцієнтів приведення до легкового автомобіля K ПРі , черги ТЗ по всіх смугах руху на підходах до перехрестя та картограму інтенсивностей руху ТЗ за невеликі періоди часу (цикл світлофорного регулювання) як у фізичних так і у приведених одиницях. Протягом кожного циклу світлофорного регулювання одночасно і послідовно визначаються параметри руху транспортних потоків на підходах і в зоні перехрестя, основні, проміжні такти і цикл світлофорного регулювання, а також коефіцієнти приведення до легкового автомобіля, потоки насичення по кожній смузі руху на підходах до перехрестя, а потім пропускна здатність підходів до перехрестя, як сукупність потоків насичення окремих смуг, з урахуванням часу 1 UA 110803 U 5 10 15 20 25 30 35 40 основного такту та циклу регулювання, а пропускна здатність всього перехрестя визначається як сукупна пропускна здатність окремих підходів (Опис до патенту на корисну модель № 101064 від 25.08.2015 р., бюл. № 16). Цей спосіб є найбільш близьким до способу, що заявляється, і тому вибраний як найближчий аналог. Недоліком цього способу є вузькі функціональні можливості, оскільки він не дозволяє одночасно визначити пропускну здатність окремих ділянок доріг. Крім цього відомі теоретичні та розрахункові способи визначення ПЗ ділянок доріг не розраховані на реальну оцінку ПЗ за короткий час виміру в залежності від особливостей ділянок, інтенсивності ТП, ширини смуг руху та швидкості руху ТЗ в контрольованій зоні, стану покриття, організації руху та стану погодних умов на час виміру. В основу запропонованого способу поставлена задача розширення функціональних можливостей відомого способу при одночасному визначенні широкого комплексу параметрів на вході і виході ділянки багатосмугових доріг. Поставлена задача вирішується тим, що в основу запропонованого способу поставлено покрокове сканування вузькоспрямованими лазерними променями інфрачервоного діапазону одночасно всіх смуг руху прямого і зворотного напрямку як на вході, так і на виході вибраної ділянки дороги, що дає можливість сформувати вхідні і вихідні межі КЗ та забезпечити визначення комплексу вищевказаних параметрів ТП по кожній смузі руху. Це досягається за рахунок розташування над проїжджою частиною на вході та виході ділянки дороги (КЗ) на спеціальному тимчасовому переносному кронштейні блока сканування та фотоприймачів (фіг. 1) таким чином, що при зміні положення кута нахилу променя у поперечному розрізі дороги на її поверхні утворюються дві паралельні лінії з дистанцією між ними в 1 м. На фіг. 1 представлена схема, яка розкриває основні відмінні особливості запропонованого способу і послідовність його дій. Відповідно до запропонованого способу, розгортка лазерного променя здійснюється блоком сканування 1, який розташовується на спеціальному кронштейні в точці, що відповідає середині проїжджої частини. До складу блока сканування входить оптичний відхиляючий пристрій (дискретний сканістор), який забезпечує відхилення осі лазерного променя в необхідне друге положення, при якому у поперечному розрізі дороги на вході і виході КЗ на її поверхні утворюються дві паралельні лінії з дистанцією між ними в 1 м. Оптичні фотоприймачі 2 (ФПі) в процесі розгортки лазерних променів 81 та 82 по лініям сканування на входах і виходах КЗ послідовно сприймають сигнали, відбиті від ТЗ, що рухаються по різним смугам і напрямках руху. Фіксацію ТЗ, що в'їжджають в КЗ з обох напрямків, здійснюють по їх передніх бамперах при пересіченні однієї з ліній сканування (наприклад R1 або R 4 ), при цьому завдяки періодичному скануванню зі зміною оптичної осі лазерного променя (з R1 на R 2 і навпаки та з R 3 на R 4 ) і проїзду ТЗ дистанції в 1 м, визначається момент в'їзду, швидкість, довжина, тип, кількість і послідовність ТЗ, що реально в'їхали в КЗ по кожній смузі руху за період вимірювань. Наявність подвійного сканування на вході в КЗ забезпечує можливість послідовного виміру на границях ділянки також таких параметрів, як дистанції L j і інтервали t j між ТЗ, що послідовно рухаються в ТП по кожній j-й смузі руху, інтенсивності руху N j в фізичних одиницях та коефіцієнтів приведення до легкового автомобіля K ПРі як відношення величини середнього 45 значення динамічного габариту Dві конкретного типу ТЗ до величини середнього значення динамічного габариту Dлі легкового автомобіля: K ПРі Dві Dлі , (1) 50 Вимірювання такого комплексу параметрів на вході і виході КЗ дає можливість також визначити інтенсивності руху ТЗ за будь-яке фіксоване значення часу виміру ТВ у приведених одиницях: NПРj KПР1N1 KПР2N2 ... KПРіNi , (2) де NПРj - інтенсивності руху ТЗ у приведених до легкового автомобіля одиницях по j-й смузі руху; Ni - число транспортних засобів типу i у потоці; K ПРі - коефіцієнт приведення ТЗ типу і до легкового автомобіля. 2 UA 110803 U 5 Фіксація ТЗ, що повністю проїхали КЗ, здійснюється за моментами перетинання їх задніми бамперами лінії сканування R1 або R 4 (в залежності від напрямку руху) на виході з КЗ одночасно по всіх смугах руху. В процесі проїзду ТЗ вхідних і вихідних ліній сканування здійснюється визначення реальних значень інтервалів руху t ji різного i-го типу ТЗ по різних смугах і напрямках руху, які враховують різноманітні особливості топографії конкретної ділянки дороги. Практичне визначення реальних значень t ji для умов конкретної ділянки дороги (та 10 конкретної смуги) дає змогу накопичувати інформацію для всіх типів інтервалів у обчислювальному пристрої 7 (див. фіг. 2) і при необхідності з часом корегувати ці значення при зміні умов руху (наприклад для зими або ожеледиці). Більш того, можливість виміру швидкості, типу, інтервалів і дистанцій руху ТЗ на вході і виході КЗ дає змогу визначати вільні інтервали hВЛ , які за значенням більше, ніж t min для легкових ТЗ по кожній конкретній смузі руху. ji Процес визначення ПЗ ділянки дороги за прийнятий час виміру TB включає підрахунок всіх ТЗ, що за цей час повністю послідовно в'їхали і виїхали з КЗ по всіх смугах руху 15 n Nj (3) N j 1 Вільні інтервали hВЛ j по смугам руху можливо фіксувати у розрядженому ТП у випадку відсутності ТЗ на вході в КЗ, якщо інтервали пересування відповідних ТЗ перевищують відповідні значення t min . ji 20 В цьому разі, при наявності таких інтервалів до значення N j додається по одному додатковому ТЗ по відповідній смузі руху. Якщо вільний інтервал hВЛ j буде більшої кратності по відношенню до t min , до значення N j додається величина ji Nj hВЛ j t min ji , (4) що по суті відповідає коефіцієнту кратності даного вільного інтервалу. Таким чином, упродовж всього часу виміру TB всі інтервали руху, що відповідають умові 25 t min hВЛ ji j штучно заповнюються додатковими ТЗ по кожній смузі руху і забезпечують безперервний ТП максимально можливої сумарної інтенсивності, що не приводить до заторового стану на цій ділянці дороги. ПЗ окремої смуги руху за одиницю часу виміру TB визначається як: q Pj Nj Ni , (5) i 1 30 де q - кількість вільних інтервалів в ТП по j-й смузі руху за час виміру TB . А значення ПЗ ділянки дороги в цьому випадку за одиницю часу виміру TB визначається як: n q P N Ni . (6) j 1i 1 35 40 45 Для уточнення та визначення статистично значущих значень ПЗ смуги або ділянки дороги, необхідно обстежити мінімум 15-20 годинних циклів у пікові часи руху. Але оперативне визначення ПЗ ділянки (в реальному масштабі часу) в умовах можливих різких змін ПЗ (затори, хурделиця або ожеледиця) дає можливість отримати важливу і корисну інформацію для систем мережевого регулювання руху на ВДМ міста з урахуванням всіх топографічних особливостей конкретної ділянки. Таким чином, оперативне визначення реальних параметрів руху (швидкості, типу, габаритів, дистанції і інтервалів між ТЗ, і т. д.) окремих видів ТЗ по усіх смугах руху на підходах до зазначеної ділянки дозволяє шляхом високошвидкісного сканування одержати (в реальному масштабі часу) точні значення ПЗ як окремих смуг, так і всієї ділянки у фізичних або приведених одиницях. Цей спосіб дає змогу миттєво реагувати на будь-які зміни усіх параметрів, від яких залежить ПЗ, на зміну погодних умов, на топографічні особливості перехрестя: ширину смуг, поздовжній ухил, кривизну траєкторій руху поворотних потоків і т. д. Все це істотно розширює функціональні можливості існуючого способу та дає можливість підвищити ефективність управління рухом транспорту міської та позаміської мережі. 3 UA 110803 U 5 10 15 20 25 30 35 40 45 На фіг. 2 надана спрощена структурна схема пристрою, що розкриває основні відмінні риси запропонованого способу. Блок сканування 1 має у своєму складі лазерний випромінювач 3 вузькоспрямованого інфрачервоного променя і вузол розгортки 4, які формують двопроменеве покрокове сканування зони входу і виходу ділянки дороги за допомогою двох дискретних сканісторів 5 1 і 52. Зміна положень кутів розгортки променів 81 та 82 здійснюється в реперній точці по черзі на кожному періоді сканування сигналом, що надходить з реперних фотоприймачів ( ФП 0 21 та 22) на входи дискретних сканісторів 51 та 52. Сканування кожним променем здійснюється у двох паралельних площинах таким чином, що при зміні положення кута нахилу променя у поперечному розрізі дороги на її поверхні утворюються дві паралельні лінії з дистанцією між ними в 1 м (фіг. 2). Зміна і чергування кутів нахилу розгортки необхідні для однозначного визначення положення ТЗ щодо ліній сканування на кожному періоді розгортки і визначення швидкості, типу, довжини, часу перетину ліній сканування кожним окремим ТЗ, дистанції L j і інтервали t j між ТЗ, що послідовно рухаються в ТП по кожній j -й смузі руху, інтенсивності руху N j в фізичних одиницях та коефіцієнтів приведення до легкового автомобіля K ПРі . Для цього фотоприймачі ( ФП 0 21 та 22) реперного сигналу відповідного блока сканування 1 1, 12 у моменти проходження променів реперних точок видають сигнали на входи перетворювача 60 реперного сигналу та на входи відповідних дискретних сканісторів 5 1 і 52, які сигналами зі своїх виходів діють на вузли розгортки 4 та змінюють кути нахилу променів при переході реперної точки. Сигнали з виходів відповідних блоків сканування 1 1, 12 та перетворювача 60 фотоприймачів реперного сигналу подаються на відповідні входи обчислювального пристрою 7 для чіткого визначення положення кожного променя за смугами руху відносно реперної точки. Відбитий від ТЗ оптичний сигнал (при наявності ТЗ в зоні, що сканується) вловлюється відповідними фотоприймачами 2 ( ФП 1 … ФП n ) кожної смуги руху як на входах, так і на виходах ділянки. Перетворювач 6 сигналів кожного ФПi відповідної смуги руху перетворює їх в імпульсно-цифрові коди, які вводяться в обчислювальний пристрій 7, де далі визначаються всі вище перелічені параметри за будь-який проміжок часу виміру. В процесі сканування границь ділянки здійснюється практичне визначення реальних значень інтервалів руху t ji для умов конкретної ділянки дороги (та конкретної смуги), що дає змогу накопичувати інформацію для всіх типів інтервалів у обчислювальному пристрої 7 і при необхідності з часом корегувати ці значення при зміні умов руху (наприклад для зими або ожеледиці). Більш того, можливість виміру швидкості, типу, інтервалів і дистанцій руху ТЗ на вході і виході КЗ дає змогу визначати вільні інтервали hВЛ , які за значенням більше, ніж t min для ji легкових ТЗ по кожній конкретній смузі руху. Якщо в обчислювальний пристрій 7 закладається алгоритм визначення ПЗ, правила і константи, відповідні значення тимчасових інтервалів руху різних типів ТЗ на ділянці, зберігається інформація про коефіцієнти приведення, склад ТЗ та поточні значення вільних інтервалів по смугах руху, тоді з'являється можливість визначення не тільки усіх перелічених вище параметрів, але і ПЗ у фізичних або приведених одиницях. Таким чином, запропонований спосіб дає можливість одержання найбільш повного комплексу інформації для контролю і оперативного (в реальному масштабі часу) визначення ПЗ ділянки дороги для конкретних дорожніх умов та подальшого управління рухом на міській та заміській ВДМ. Перевагою запропонованого способу також є те, що пристрій для його реалізації можна виконати як переносний і здійснювати виміри ПЗ на багатьох ділянках ВДМ. Зважаючи на малу потужність лазерного інфрачервоного випромінювання, воно не буде мати шкідливого впливу на водіїв і пішоходів. 50 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 Спосіб визначення пропускної здатності ділянки доріг, який заснований на скануванні одночасно двома гостроспрямованими лазерними променями вхідних і вихідних меж ділянки з точки, що відповідає середині проїжджої частини, причому забезпечується відхилення осі кожного лазерного променя в необхідне друге положення, при якому у поперечному розрізі дороги на 4 UA 110803 U 5 10 15 20 вході і виході ділянки на її поверхні утворюються дві паралельні лінії з певною дистанцією між ними, а зміна положень розгортки здійснюється з високою швидкістю по черзі через кожен період сканування, подальшому прийомі відображених оптичних сигналів фотоприймачами і надалі перетворенні цих сигналів в імпульсно-числові коди, за якими визначаються швидкість, тип, довжина, час перетину ліній сканування кожним окремим транспортним засобом, дистанції і інтервали між транспортними засобами, що послідовно рухаються по кожній смузі руху, інтенсивності руху в фізичних одиницях та коефіцієнти приведення до легкового автомобіля, який відрізняється тим, що в процесі сканування границь ділянки здійснюється практичне визначення реальних значень інтервалів руху різного типу транспортних засобів по різних смугах і напрямках руху, накопичення інформації про всі типи інтервалів у обчислювальному пристрої і при необхідності з часом корегування цих значень при зміні умов руху, визначення вільних інтервалів, які за значенням більше мінімально можливих інтервалів для легкових автомобілів по кожній конкретній смузі руху, кількість всіх транспортних засобів, що за час виміру повністю послідовно виїхали з зони ділянки по всіх смугах, а кожний вільний інтервал за час виміру штучно заповнюється додатковими транспортними засобами по кожній смузі ділянки з урахуванням коефіцієнтів кратності вільного інтервалу для даної конкретної смуги, при цьому пропускна здатність окремої смуги руху ділянки за одиницю часу виміру визначається як сума всіх транспортних засобів, які повністю виїхали за цей час із зони ділянки та додаткових транспортних засобів, які заповнюють вільні інтервали, а пропускна здатність ділянки дороги як у фізичних, так і приведених одиницях визначається як сума пропускних здатностей окремих смуг, що забезпечують безперервний транспортний потік максимально можливої сумарної інтенсивності, який не приводить до заторового стану на ділянці дороги. 5 UA 110803 U Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G08G 1/09
Мітки: ділянки, доріг, здатності, спосіб, пропускної, визначення
Код посилання
<a href="https://ua.patents.su/8-110803-sposib-viznachennya-propuskno-zdatnosti-dilyanki-dorig.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення пропускної здатності ділянки доріг</a>
Спосіб визначення пропускної здатності регульованого перехрестя
Номер патенту: 101064
Опубліковано: 25.08.2015
Автор: Денисенко Олег Васильович
МПК: G08G 1/01
Мітки: спосіб, регульованого, визначення, здатності, пропускної, перехрестя
Формула / Реферат:
Спосіб визначення пропускної здатності регульованого перехрестя, що заснований на скануванні одночасно трьома гостроспрямованими лазерними променями зони перехрестя з точці над його геометричним центром конусним видом розгортки, причому оптична вісь одного з положень розгортки першого променя вибирається так, щоб він описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а друге положення розгортки відповідало...
Спосіб інтраопераційного визначення пропускної здатності дистального русла артерій нижньої кінцівки
Номер патенту: 94080
Опубліковано: 27.10.2014
Автори: Карпович Дмитро Іванович, Соколянська Людмила Григорівна, Аксенко Олександр Олександрович, Савенков Володимир Ілліч
МПК: A61B 5/02
Мітки: русла, кінцівки, спосіб, нижньої, здатності, дистального, артерій, інтраопераційного, визначення, пропускної
Формула / Реферат:
1. Спосіб інтраопераційного визначення пропускної здатності дистального русла артерій нижньої кінцівки, заснований на перфузії реципієнтної артерії кінцівки гепаринізованим фізіологічним розчином із прозорої ємкості, піднятої на висоту 120 см над рівнем артерії протягом заданого часу і визначенні об'єму введення в артерію зазначеного розчину, який відрізняється тим, що як ємність використовують стандартний флакон з герметично заповненим в...
Спосіб інтраопераційного визначення пропускної здатності дистального русла артерій нижньої кінцівки
Номер патенту: 94081
Опубліковано: 27.10.2014
Автори: Савенков Володимир Ілліч, Соколянська Людмила Григорівна, Карпович Дмитро Іванович, Аксенко Олександр Олександрович
МПК: A61B 5/02
Мітки: пропускної, дистального, артерій, інтраопераційного, кінцівки, визначення, здатності, русла, спосіб, нижньої
Формула / Реферат:
1. Спосіб інтраопераційного визначення пропускної здатності дистального русла артерій нижньої кінцівки, заснований на перфузії реципієнтної артерії кінцівки гепаринізованим фізіологічним розчином за допомогою системи парентерального вливання, піднятої на висоту 120 см над рівнем артерії протягом заданого часу, і визначенні об'єму введення в зазначену артерію даного розчину, який відрізняється тим, що додатково здійснюють зважування системи...
Спосіб забезпечення високої пропускної здатності епізодичної радіомережі
Номер патенту: 86752
Опубліковано: 10.01.2014
Автори: Романченко Ігор Сергійович, Семенченко Андрій Іванович, Лисенко Олександр Іванович, Данилюк Сергій Леонідович, Чумаченко Сергій Миколайович, Валуйський Станіслав Вікторович, Кірчу Павло Іванович
МПК: H04W 84/00, H04W 8/02, H04W 16/10, H04W 16/02, H04W 28/08, H04W 8/08
Мітки: епізодичної, пропускної, радіомережі, здатності, забезпечення, високої, спосіб
Формула / Реферат:
Спосіб забезпечення високої пропускної здатності епізодичної радіомережі, за яким в повітря піднімають один безпілотний літальний апарат, утворюють на земній поверхні зону радіопокриття фіксованого радіуса, ретранслюють сигнали, забезпечують епізодичний зв'язок між мобільними абонентами радіомережі, збирають дані про поточне розміщення мобільних абонентів в центрі управління, будують мінімальне кістякове дерево графа мережі та визначають...
Спосіб забезпечення високої пропускної здатності епізодичної радіомережі
Номер патенту: 106939
Опубліковано: 27.10.2014
Автори: Кірчу Павло Іванович, Данилюк Сергій Леонідович, Семенченко Андрій Іванович, Романченко Ігор Сергійович, Валуйський Станіслав Вікторович, Чумаченко Сергій Миколайович, Лисенко Олександр Іванович
МПК: H04W 8/02, H04W 84/00, H04W 28/08, H04W 16/10, H04W 8/08, H04W 16/02
Мітки: епізодичної, забезпечення, пропускної, високої, спосіб, здатності, радіомережі
Формула / Реферат:
Спосіб забезпечення високої пропускної здатності епізодичної радіомережі, за яким в повітря піднімають один безпілотний літальний апарат, утворюють на земній поверхні зону радіопокриття фіксованого радіуса, ретранслюють сигнали, забезпечують епізодичний зв'язок між мобільними абонентами радіомережі, збирають дані про поточне розміщення мобільних абонентів в центрі управління, будують мінімальне кістякове дерево графа мережі та визначають...