Спосіб улаштовування пальових фундаментів

Формула / Реферат
Спосіб улаштовування пальових фундаментів, що передбачає монтаж агрегатного модуля, примусове координатне переміщування палевдавлюючої машини по агрегатному модулю у поздовжньому і поперечному напрямках і вдавлювання паль в першому координаційному просторі, який відрізняється тим, що після вдавлювання паль в першому координаційному просторі паралельно агрегатному модулю установлюють додаткову поздовжню напрямну опору і допоміжну каретку, на яку переводять палевдавлюючу машину, примусово переміщають її на допоміжній каретці і вдавлюють палі в другому координаційному просторі, при цьому в залежності від проектного положення паль в плані при русі палевдавлюючоі машини у поперечному напрямку нарощують опорний шлях, палевдавлюючу машину переводять в наступний координаційний простір і продовжують вдавлювання паль, а при русі палевдавлюючоі машини у поздовжньому напрямку збирають і установлюють додатковий модуль, який пристиковують до агрегатного модуля, за допомогою вузла стикування, виконаного у вигляді швидкорознімного центруючого з'єднання, палевдавлюючу машину разом із основною кареткою переводять на додатковий модуль і вдавлюють палі в координаційному просторі додаткового модуля.
Текст
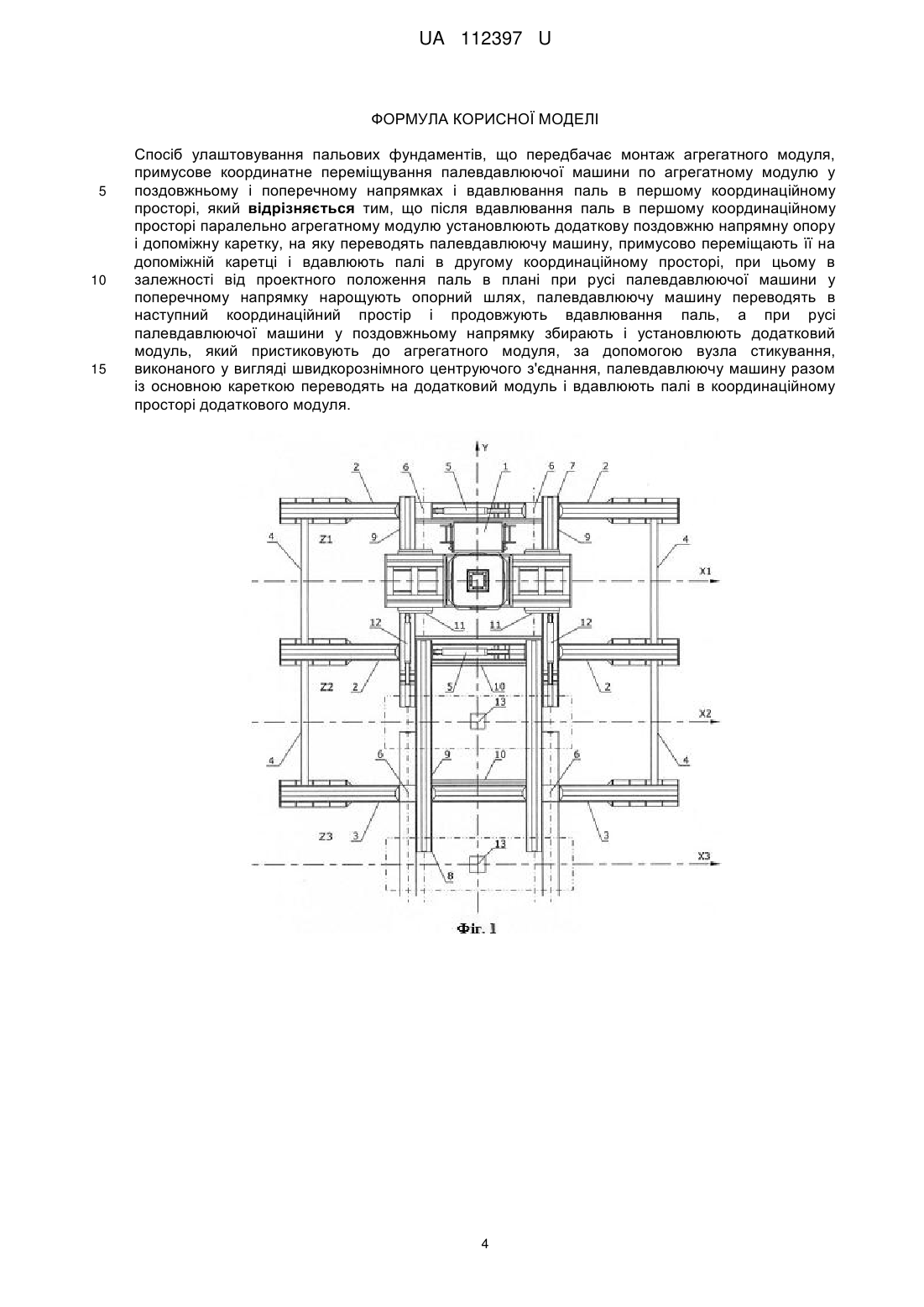
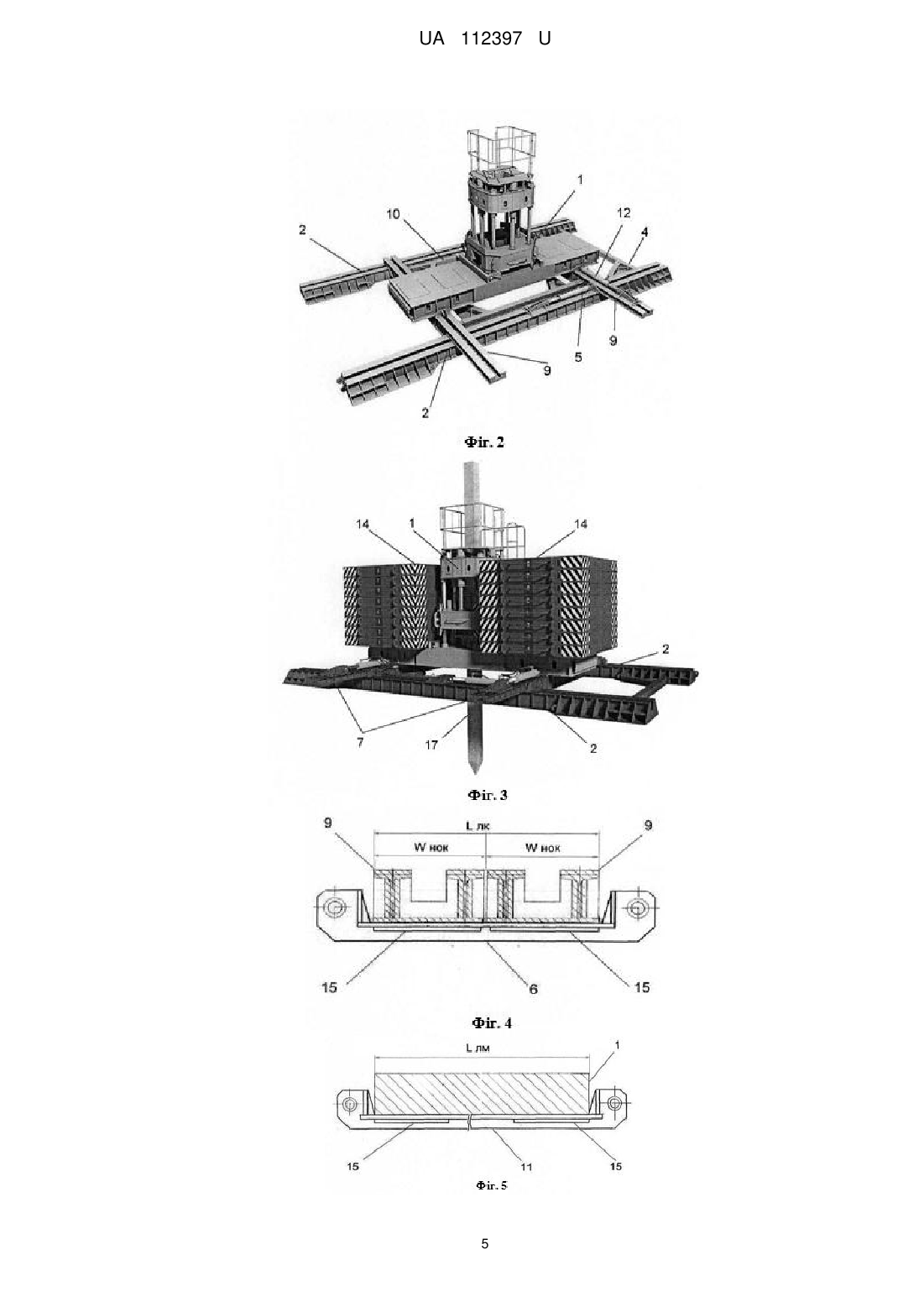
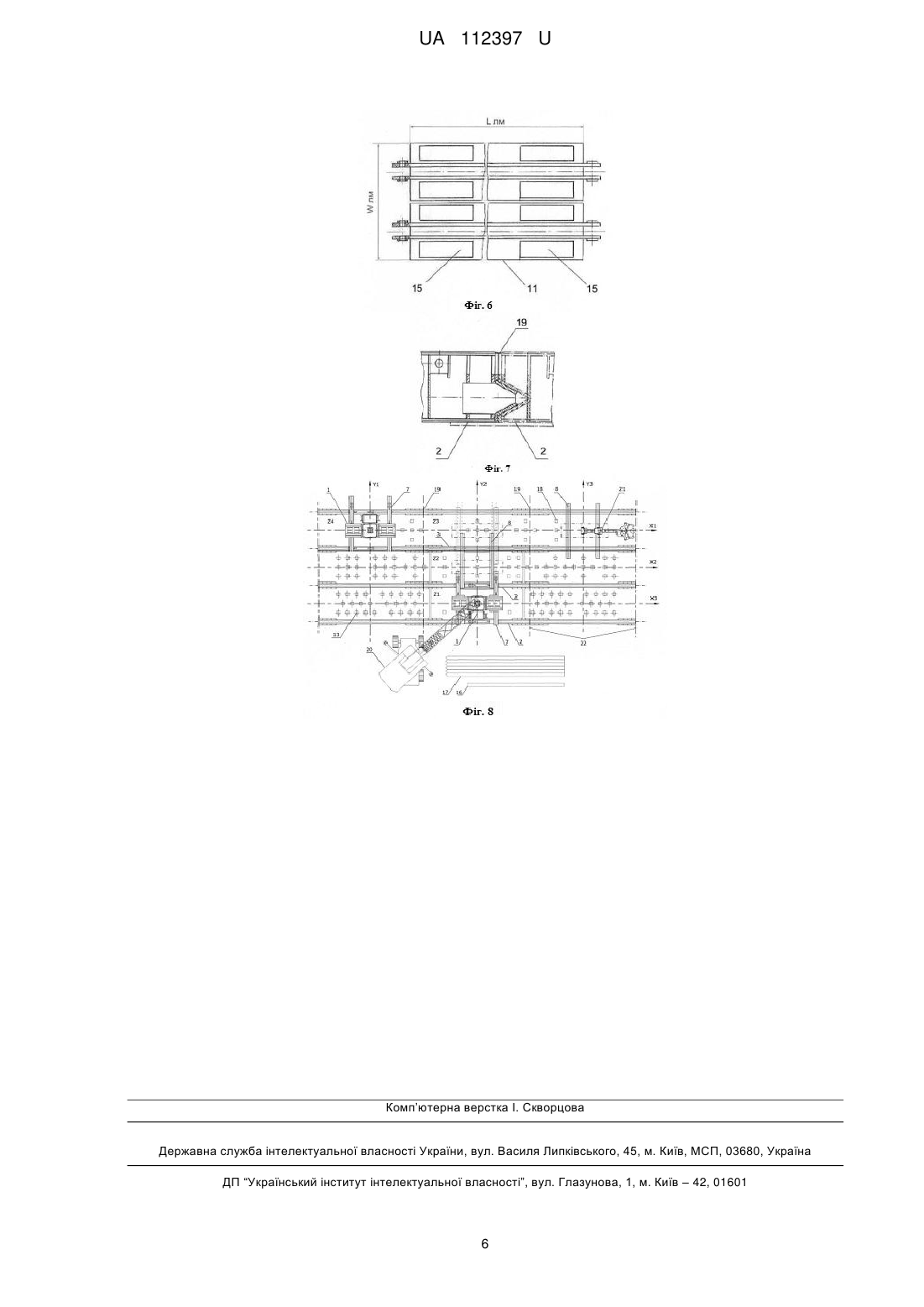
Реферат: Спосіб улаштовування пальових фундаментів передбачає монтаж агрегатного модуля, примусове координатне переміщування палевдавлюючоі машини по агрегатному модулю у поздовжньому і поперечному напрямках і вдавлювання паль в першому координаційному просторі. Після вдавлювання паль в першому координаційному просторі паралельно агрегатному модулю установлюють додаткову поздовжню напрямну опору і допоміжну каретку, на яку переводять палевдавлюючу машину, примусово переміщають її на допоміжній каретці і вдавлюють палі в другому координаційному просторі. В залежності від проектного положення паль в плані при русі палевдавлюючоі машини у поперечному напрямку нарощують опорний шлях, палевдавлюючу машину переводять, в наступний координаційний простір і продовжують вдавлювання паль. При русі палевдавлюючоі машини у поздовжньому напрямку збирають і установлюють додатковий модуль, який пристиковують до агрегатного модуля, за допомогою вузла стикування, виконаного у вигляді швидкорознімного центруючого з'єднання. Палевдавлюючу машину разом із основною кареткою переводять на додатковий модуль і вдавлюють палі в координаційному просторі додаткового модуля. UA 112397 U (54) СПОСІБ УЛАШТОВУВАННЯ ПАЛЬОВИХ ФУНДАМЕНТІВ UA 112397 U UA 112397 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до будівельної галузі і може бути використана при улаштовуванні пальових фундаментів із застосуванням систем для вдавлювання паль. Найбільш близьким до способу, що заявляється, є спосіб улаштовування пальових фундаментів наведений в описі до патенту України на винахід № 93343. У відповідності до вказаного способу спочатку здійснюється зборка модулів, що включає установку поздовжніх напрямних опор, з'єднувальних балок, а також лиж і гідроциліндрів поздовжнього переміщення машини. Після цього збирають каретку - установлюють поздовжні напрямні опори, з'єднувальні балки, лижі і гідроциліндри для поперечного переміщення палевдавлюючої машини. Далі модуль за допомогою крана установлюється на ґрунт таким чином, щоб осі пальового ряду (осі споруди) співпадали з основними осями модулів і виконується послідовне з'єднання модулів. Після цього формується агрегатний модуль шляхом установлення каретки на поздовжні напрямні опори, установлення палевдавлюючої машини на каретку і підключення гідросистеми модуля до гідросистеми машини. Далі виконується анкерування палевдавлюючої машини: установлення краном анкерних вантажів на раму машини і перевірка горизонтальності машини після анкерування. Палевдавлююча машина переміщується на точку вдавлювання палі за допомогою гідроциліндрів поперечного та поздовжнього переміщення машини. Вдавлювання паль здійснюється у наступному порядку. Паля подається краном в напрямний уловлювач палевдавлюючої машини, центрується в механізмі затискання і вдавлюється в ґрунт в автоматичному або ручному режимі до досягнення проектної відмітки або контрольного зусилля вдавлювання. Після цього палевдавлююча машина переміщується на точку вдавлювання наступної палі. Коли завершено вдавлювання усіх паль, розташованих в координаційному просторі (робочій зоні машини) модулів, виконується операція перестикування модулів, яка включає їх розстикування, переустановлення краном модуля по ходу руху палевдавлюючої машини і послідовне стикування або паралельне з'єднання модулів. Коли завершується вдавлювання усіх паль в наступному координаційному просторі, при переході на нові осі вдавлювання, при зміні напрямку руху палевдавлюючої машини по будівельному майданчику, виконуються такі операції: розвантаження машини від анкерних вантажів, зняття машини з каретки, зняття каретки з модуля, перестановка модулів краном, установлення каретки на модуль, установлення машини на каретку, анкерування машини. Після завершення робот виконується розвантаження машини, демонтаж каретки і демонтаж модулів. Даний спосіб обрано прототипом. Прототип і корисна модель, що заявляється, мають наступні спільні операції: монтаж агрегатного модуля; примусове координатне переміщення палевдавлюючої машини по агрегатному модулю у поздовжньому і поперечному напрямках; вдавлювання паль в першому координаційному просторі модуля. Але способу за прототипом притаманні наступні недоліки. 1. В умовах обмеженого робочого простору будівельного майданчика послідовне стикування модулів утруднено. 2. Неможливо здійснювати операції по послідовній і паралельній перестановці модулів через обмеження зони роботи крана. 3. При паралельному з'єднанні модулів утворюється простір, що випадає з робочої зони машини, (неможливість вдавлювати палі в просторі між модулями, з'єднаними паралельно). 4. Операція з переводу палевдавлюючої машини на паралельний модуль складна і небезпечна, з огляду на велику вагу обладнання. 5. Розрив безперервності основних технологічних операцій (вдавлювання - переміщення) і, як наслідок, неможливість їх автоматизації. Виникає необхідність в додаткових операціях по перестановці обладнання краном в новий робочий простір (переанкерування машини, установка / зняття каретки і модулів). Це призводить до зниження продуктивності палевдавлюючої машини, недостатньої точності (технологічної і позиційної) вдавлювання паль, а також до збільшення машинного часу, трудозатрат та експлуатаційних витрат. В основу корисної моделі поставлено задачу розробити спосіб улаштовування пальових фундаментів, в якому шляхом зміни порядку виконання операцій в способі, забезпечити підвищення продуктивності та технологічної і позиційної точності вдавлювання паль, що покращує якість і надійність пальових фундаментів, безперервність основних технологічних 1 UA 112397 U 5 10 15 20 25 30 35 40 45 50 55 процесів (вдавлювання - переміщення), що дає можливість їх автоматизації, зменшення трудота енерговитрат, а також можливість багаторазово використовувати складові стандартні елементи системи в різних компоновках і в зв'язку з умовами будівництва, які змінюються. Поставлена задача вирішується в способі улаштовування пальових фундаментів, що передбачає монтаж агрегатного модуля, примусове координатне переміщування палевдавлюючоі машини по агрегатному модулю у поздовжньому і поперечному напрямках і вдавлювання паль в першому координаційному просторі, згідно з корисною моделлю, після вдавлювання паль в першому координаційному просторі паралельно агрегатному модулю установлюють додаткову поздовжню напрямну опору і допоміжну каретку, на яку переводять палевдавлюючу машину, примусово переміщають її на допоміжній каретці і вдавлюють палі в другому координаційному просторі, при цьому в залежності від проектного положення паль в плані, при русі палевдавлюючої машини у поперечному напрямку нарощують опорний шлях, палевдавлюючу машину переводять, в наступний координаційний простір і продовжують вдавлювання паль, а при русі палевдавлюючої машини у поздовжньому напрямку збирають і установлюють додатковий модуль, який пристиковують до агрегатного модуля, за допомогою вузла стикування, виконаного у вигляді швидкорознімного центруючого з'єднання, палевдавлюючу машину разом із основною кареткою переводять на додатковий модуль і вдавлюють палі в координаційному просторі додаткового модуля. Корисна модель, що заявляється ілюструється кресленнями, на яких показано: Фіг. 1 - схема системи для вдавлювання паль; Фіг. 2 - схема агрегатного модуля системи; Фіг. 3 - агрегатний модуль з комплектом анкерних вантажів; Фіг. 4 - лижа для переміщення кареток, вигляд збоку; Фіг. 5 - лижа для переміщення палевдавлюючої машини, вигляд збоку; Фіг. 6 - лижа для переміщення палевдавлюючої машини, вигляд знизу; Фіг. 7 - швидкорознімне центруюче з'єднання; Фіг. 8 - схема улаштовування фундаментів із застосуванням системи для вдавлювання паль. Заявлений спосіб реалізується за допомогою системи для вдавлювання паль, що містить палевдавлюючу машину 1, поздовжні напрямні опори 2, додаткову напрямну опору 3, з'єднувальні балки модуля 4 (використовують за необхідністю), гідроциліндри поздовжнього переміщення 5, лижі для переміщення кареток 6, каретку основну 7, каретку допоміжну 8, поперечну направляючу опору каретки 9, з'єднувальні балки кареток 10, лижі для переміщення палевдавлюючої машини 11, гідроциліндри поперечного переміщення 12 палевдавлюючої машини 1. Ширина кожної лижі 11 для переміщення палевдавлюючої машини 1 (W л.м.) дорівнює довжині лижі для переміщення основної 7 і допоміжної 8 кареток (L л.к). Довжина кожної лижі для переміщення основної 7 і допоміжної 8 кареток дорівнює ширині двох поперечних направляючих опор кареток (н.о.к.) 9. W л.м.=L л.к.=2W н.о.к. Для ілюстрації роботи на кресленнях показано: проектне положення паль 13, внутрішній координаційний простір модуля (операційна зона палевдавлюючої машини 1) - Z1, Z2, Z3, Z4, анкерні вантажі 14, антифрикційні накладки 15, паля інвентарна 16, вдавлювані палі 17, палі вдавлені на проектну відмітку 18, вузол стикування модулів 19, кран 20, додаткове технологічне обладнання 21 та модульна сітка споруд 22. Спосіб улаштовуванняпальових фундаментів здійснюється у наступному порядку. I. Спочатку здійснюється складання і монтаж агрегатного модуля системи, а саме установка поздовжніх напрямних опор 2, з'єднувальних балок 4, лиж каретки 6 і гідроциліндрів поздовжнього переміщення 5. При цьому контролюються координаційні осі (Χ, Υ) споруди, прив'язка до модульної сітки споруди. II. Збірка основної 7 і допоміжної 8 кареток. Установка поперечних напрямних опор каретки 9, з'єднувальних балок кареток 10, установка лижі для переміщення палевдавлюючої машини 11 і гідроциліндрів поперечного переміщення 12 палевдавлюючої машини 1. III. Установлення основної каретки 7 на повздовжні напрямні опори 2 агрегатного модуля. Установлення палевдавлюючої машини 1 на основну каретку 7. Підключення гідросистеми агрегатного модуля до палевдавлюючої машини 1. Анкерування. Установка анкерних вантажів 14 на вантажну раму палевдавлюючої машини 1. Перевірка горизонтальності палевдавлюючої машини 1 після анкерування. 2 UA 112397 U 5 10 15 20 25 30 35 40 45 50 55 IV. Вдавлювання паль в координаційному просторі агрегатного модуля Z1. Палевдавлююча машина 1 переміщається на позначку вдавлювання палі 13 за допомогою гідроциліндрів поздовжнього 5 і поперечного 12 переміщення палевдавлюючої машини 1. Вдавлювання палі здійснюється наступним чином. Паля подається краном 20 в напрямний уловлювач палевдавлюючої машини 1, центрується в механізмі затиску і вдавлюється в ґрунт в автоматичному або ручному режимах до досягнення проектної позначки або контрольного зусилля вдавлення. Для занурення палі нижче поверхні землі використовується металева інвентарна паля 16. Далі здійснюється переміщення палевдавлюючої машини 1 на позначку вдавлювання чергової палі. Паралельно основному процесу, або після завершення вдавлювання всіх паль розташованих в координаційному просторі модуля (операційній зоні палевдавлюючої машини Z1) виконується нарощування опорної системи переміщення. Для цього додаткова напрямна опора 3 установлюється краном 20 на ґрунт, таким чином, щоб сформувався новий координаційний (модульний) простір Z2, установлюються лижі для переміщення кареток 6, з'єднувальні балки 4. При цьому контролюються міжосьові відстані модуля, координаційні осі (Χ, Υ) споруди, прив'язка модульної сітки системи 22 до модульної сітки споруди. Допоміжна каретка 8 установлюється на лижі для переміщення кареток 6, які розташовані на напрямних опорах 2 і 3. Палевдавлююча машина 1 переміщується в координаційний простір Z2. Для цього краном 20 переставляються гідроциліндри поперечного переміщення 12 з основної каретки 7 на допоміжну каретку 8. Переміщення палевдавлюючої машини 1 за допомогою гідроциліндрів поперечного переміщення 12 з основної каретки 7 на допоміжну 8. Перестановка гідроциліндра поздовжнього переміщення 5 з крайньої поздовжньої направляючої опори 2 на додаткову напрямну опору 3. Вдавлювання паль 13 в координаційному просторі Z2 здійснюється аналогічно тому, як в координаційному просторі Z1. Після вдавлення всіх паль в координаційному просторі Z2 здійснюється нарощування опорної системи. Операція може виконуватися паралельно основному процесу. Зняття основної каретки 7 з поздовжніх напрямних опор 2. Перестановка крайньої поздовжньої направляючої опори 2 по осі Y, установка основної каретки 7 на напрямні опори 3 і 2. Перестановка гідроциліндрів поперечного переміщення 12 з допоміжної каретки 8 на основну каретку 7. Переміщення палевдавлюючої машини 1 з допоміжної каретки 8 на основну каретку 7. Перестановка гідроциліндра поздовжнього переміщення 5. Вдавлювання паль 13 в координаційному просторі Z3 здійснюється аналогічно тому, як в координаційному просторі Z2. Після завершення роботи здійснюється демонтаж системи, що включає операції з розвантаження палевдавлюючої машини 1 від анкерних вантажів 14, зняття палевдавлюючої машини 1 з каретки, зняття основної 7 і допоміжної 8 кареток з поздовжніх напрямних опор. Демонтаж основної 7 і допоміжної 8 кареток. Демонтаж модулів. Варіанти здійснення способу При необхідності руху палевдавлюючої машини 1 по пальовому полю уздовж осі X здійснюється послідовне пристикування додаткового модуля, включаючи його збірку і монтаж (аналогічно тому, як описано в прототипі). Рух палевдавлюючої машини 1 по пальовому полю уздовж осі X здійснюється методом послідовного перестикування модулів. При цьому використання вузлів стикування модулів 19, виконаних у вигляді швидкорознімного центруючого з'єднання, забезпечує позиційну точність і енергозбереження за рахунок зниження навантаження на кран 20, зниження машинного часу і витрат праці робітників. Допоміжна каретка 8 може бути використана для розміщення на ній додаткового технологічного обладнання (пристрою для гідророзмиву, пристрою для зрубування голів паль, пристрою для улаштовування колон з щебеню і гравію, бурового обладнання і т.п.) 21 з можливістю її синхронного переміщення разом з основною кареткою 7 по модульній сітці споруди 22. Напрямні опори модуля 2 і 3 можуть бути використані для розміщення на них, у складі системи, будівельного обладнання з незалежною гідросистемою (будівельного 3D-принтера, кранового маніпулятора, механізму для влаштовування геотермальних паль). Перелічене істотно підвищує ефективність і відкриває можливість автоматизації робіт по улаштовуванню пальових фундаментів. 60 3 UA 112397 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 Спосіб улаштовування пальових фундаментів, що передбачає монтаж агрегатного модуля, примусове координатне переміщування палевдавлюючої машини по агрегатному модулю у поздовжньому і поперечному напрямках і вдавлювання паль в першому координаційному просторі, який відрізняється тим, що після вдавлювання паль в першому координаційному просторі паралельно агрегатному модулю установлюють додаткову поздовжню напрямну опору і допоміжну каретку, на яку переводять палевдавлюючу машину, примусово переміщають її на допоміжній каретці і вдавлюють палі в другому координаційному просторі, при цьому в залежності від проектного положення паль в плані при русі палевдавлюючої машини у поперечному напрямку нарощують опорний шлях, палевдавлюючу машину переводять в наступний координаційний простір і продовжують вдавлювання паль, а при русі палевдавлюючої машини у поздовжньому напрямку збирають і установлюють додатковий модуль, який пристиковують до агрегатного модуля, за допомогою вузла стикування, виконаного у вигляді швидкорознімного центруючого з'єднання, палевдавлюючу машину разом із основною кареткою переводять на додатковий модуль і вдавлюють палі в координаційному просторі додаткового модуля. 4 UA 112397 U 5 UA 112397 U Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: E02D 7/20
Мітки: спосіб, улаштовування, пальових, фундаментів
Код посилання
<a href="https://ua.patents.su/8-112397-sposib-ulashtovuvannya-palovikh-fundamentiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб улаштовування пальових фундаментів</a>
Спосіб улаштування пальових фундаментів в твердих та щільних водонасичених ґрунтах
Номер патенту: 83415
Опубліковано: 10.07.2008
Автор: Федоренко Петро Петрович
МПК: E02D 7/22
Мітки: водонасичених, щільних, ґрунтах, твердих, улаштування, пальових, фундаментів, спосіб
Формула / Реферат:
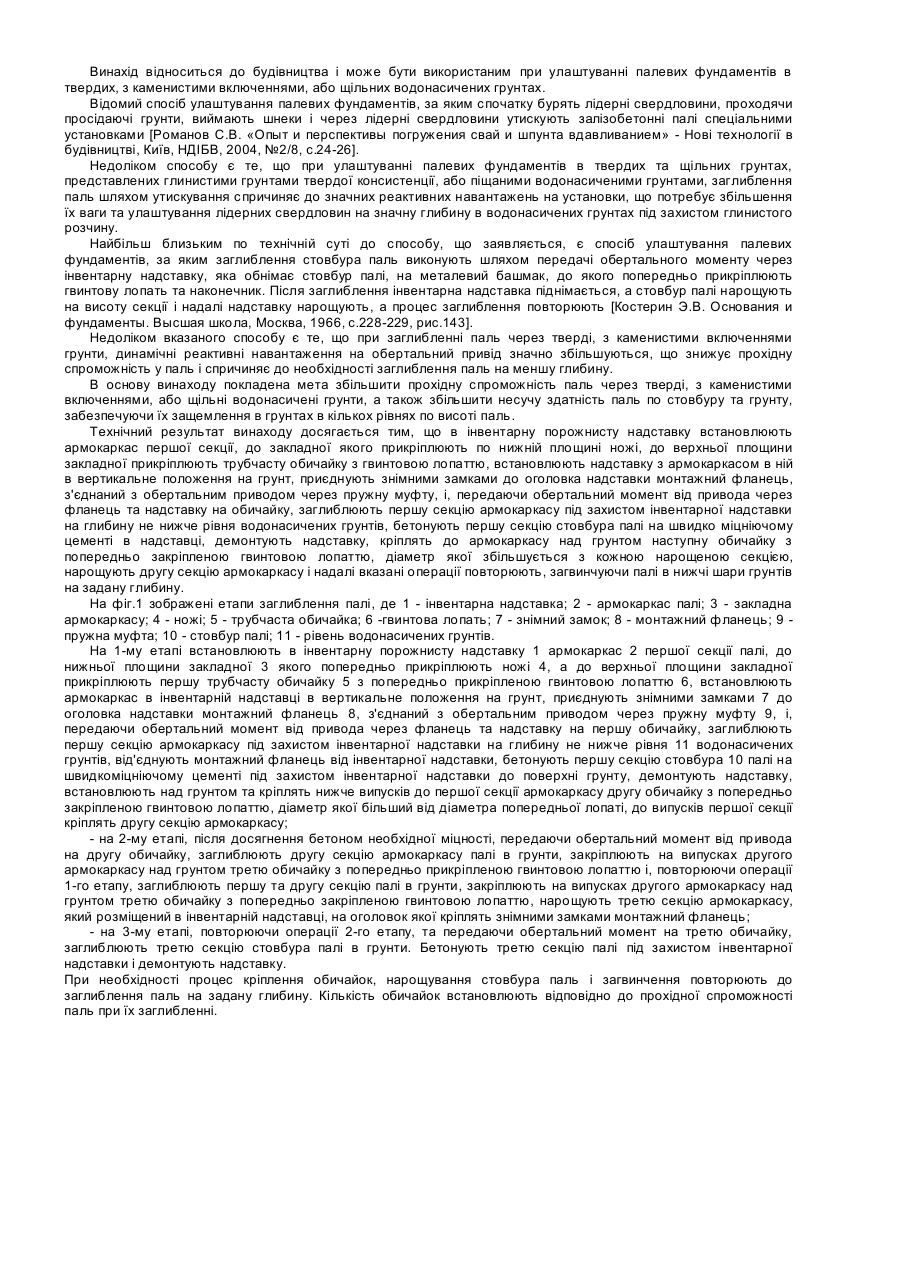
Спосіб улаштування пальових фундаментів в твердих та щільних водонасичених ґрунтах, який включає заглиблення паль шляхом передачі обертального моменту через інвентарну надставку на стовбур, до якого попередньо прикріплюють гвинтову лопать, після заглиблення першої секції палі підняття інвентарної надставки та нарощення стовбура палі на висоту секції з повторенням процесу заглиблення, який відрізняється тим, що до нарощених секцій стовбура...
Спосіб виготовлення пальових фундаментів
Номер патенту: 47471
Опубліковано: 10.02.2010
Автори: Прохватило Ольга Ігорівна, Богданов Юрій Володимирович, Гільов Володимир Володимирович
МПК: E02D 5/22
Мітки: виготовлення, фундаментів, спосіб, пальових
Формула / Реферат:
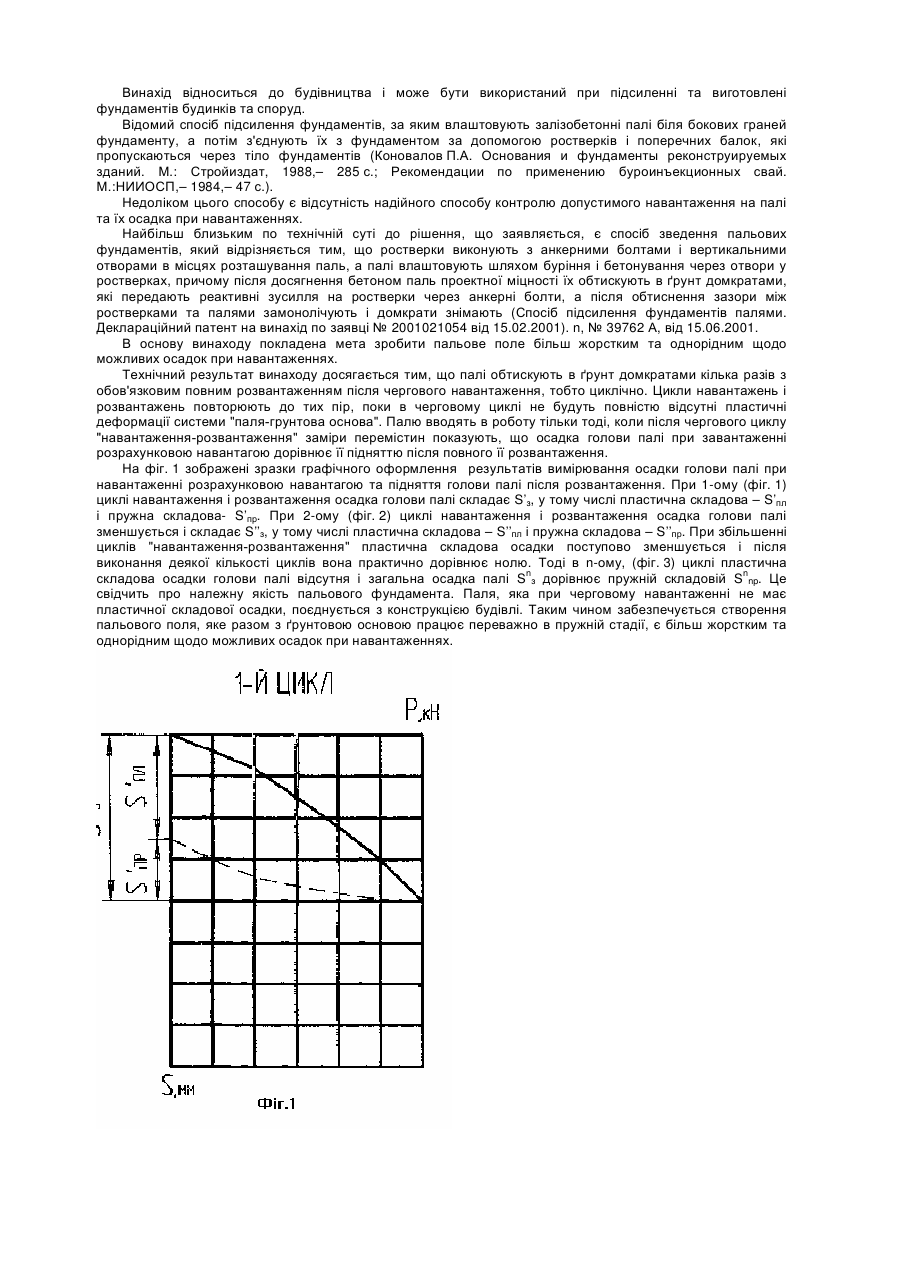
Спосіб виготовлення пальових фундаментів шляхом занурення паль у ґрунт, який відрізняється тим, що палю виконують у вигляді стальної труби із шнеком усередині, яку занурюють у ґрунт під власною вагою, одночасно пробурюючи свердловину з подальшим заповненням труби бетоном з пошаровим ущільненням.
Спосіб підсилення фундаментів палями
Номер патенту: 46498
Опубліковано: 15.05.2002
Автори: Снісаренко Володимир Іванович, Волощук Іван Степанович, Ратнер Яків Львович
МПК: E02D 27/00
Мітки: підсилення, палями, спосіб, фундаментів
Формула / Реферат:
Спосіб підсилення фундаментів палями, який включає влаштування поперечних двоконсольних балок у тілі фундаменту, що приєднуються консолями до ростверків з анкерними болтами і вертикальними отворами в місцях розташування паль, влаштування паль шляхом буріння і бетонування через отвори у ростверках, витримування бетону паль до проектної міцності, обтиснення паль у грунті домкратами, які передають реактивні зусилля на ростверки через анкерні...
Спосіб підсилення фундаментів палями
Номер патенту: 39762
Опубліковано: 15.06.2001
Автори: Ратнер Яків Львович, Снісаренко Володимир Іванович, Волощук Іван Степанович
МПК: E02D 27/00
Мітки: підсилення, спосіб, палями, фундаментів
Формула / Реферат:
Спосіб підсилення фундаменту, який включає улаштування залізобетонних паль, ростверків уздовж фундаменту з залишенням зазорів навколо кожної палі, поперечних двоконсольних балок в тілі фундаменту, що приєднуються консолями до ростверків, то наступне замонолічування зазорів між ростверками та полями, який відрізняється тим, що ростверки виконують з анкерними болтами і вертикальними отворами в місцях розташування паль, а палі влаштовують шляхом...
Система для вдавлювання паль
Номер патенту: 93343
Опубліковано: 10.02.2011
Автори: Мещеряков Георгій Миколайович, Вакулін Ніколай Анатольєвіч
МПК: E02D 7/20
Мітки: паль, вдавлювання, система
Формула / Реферат:
1. Система для вдавлювання паль, що містить пристрій для вдавлювання паль, виконаний у вигляді палевдавлюючої машини, і механізм для переміщення машини, який включає в себе, щонайменше, два модулі, призначені для встановлення на них палевдавлюючої машини з можливістю її переміщення, та гідроциліндри для примусового переміщення палевдавлюючої машини, яка відрізняється тим, що кожен модуль пристосований для встановлення на ньому одному...
Попередній патент: Спосіб передачі інформації
Наступний патент: Система для вдавлювання паль
Випадковий патент: Хвильовий п'єзоелектричний привід