Система для вдавлювання паль

Формула / Реферат
1. Система для вдавлювання паль, що містить пристрій для вдавлювання паль, виконаний у вигляді гідравлічної палевдавлюючої машини, і механізм для переміщення палевдавлюючої машини, який включає в себе агрегатний модуль і гідроциліндри для примусового переміщення палевдавлюючої машини, причому агрегатний модуль пристосований для установлення на ньому палевдавлюючої машини з можливістю її переміщення по ньому у двох взаємно перпендикулярних поздовжньому і поперечному напрямках і виконаний у вигляді рамної конструкції, що утворена поздовжніми напрямними опорами, які сполучені між собою з'єднувальними балками, та основної каретки, яка установлена на зазначену рамну конструкцію агрегатного модуля з можливістю переміщення по ній палевдавлюючої машини у поздовжньому і поперечному напрямках, яка відрізняється тим, що містить додаткову поздовжню напрямну опору, сполучену з одною із поздовжніх напрямних опор модуля за допомогою додаткових з'єднувальних балок, допоміжну каретку, яка установлена на поздовжню напрямну опору агрегатного модуля, і додаткову напрямну опору, при цьому ширина допоміжної каретки менше ширини основної каретки, система також містить лижі для переміщення палевдавлюючої машини і лижі для переміщення кареток.
2. Система для вдавлювання паль за п. 1, яка відрізняється тим, що довжина кожної лижі для переміщення кареток дорівнює ширині кожної лижі для переміщення палевдавлюючої машини і ширині двох поперечних напрямних опор каретки.
Текст
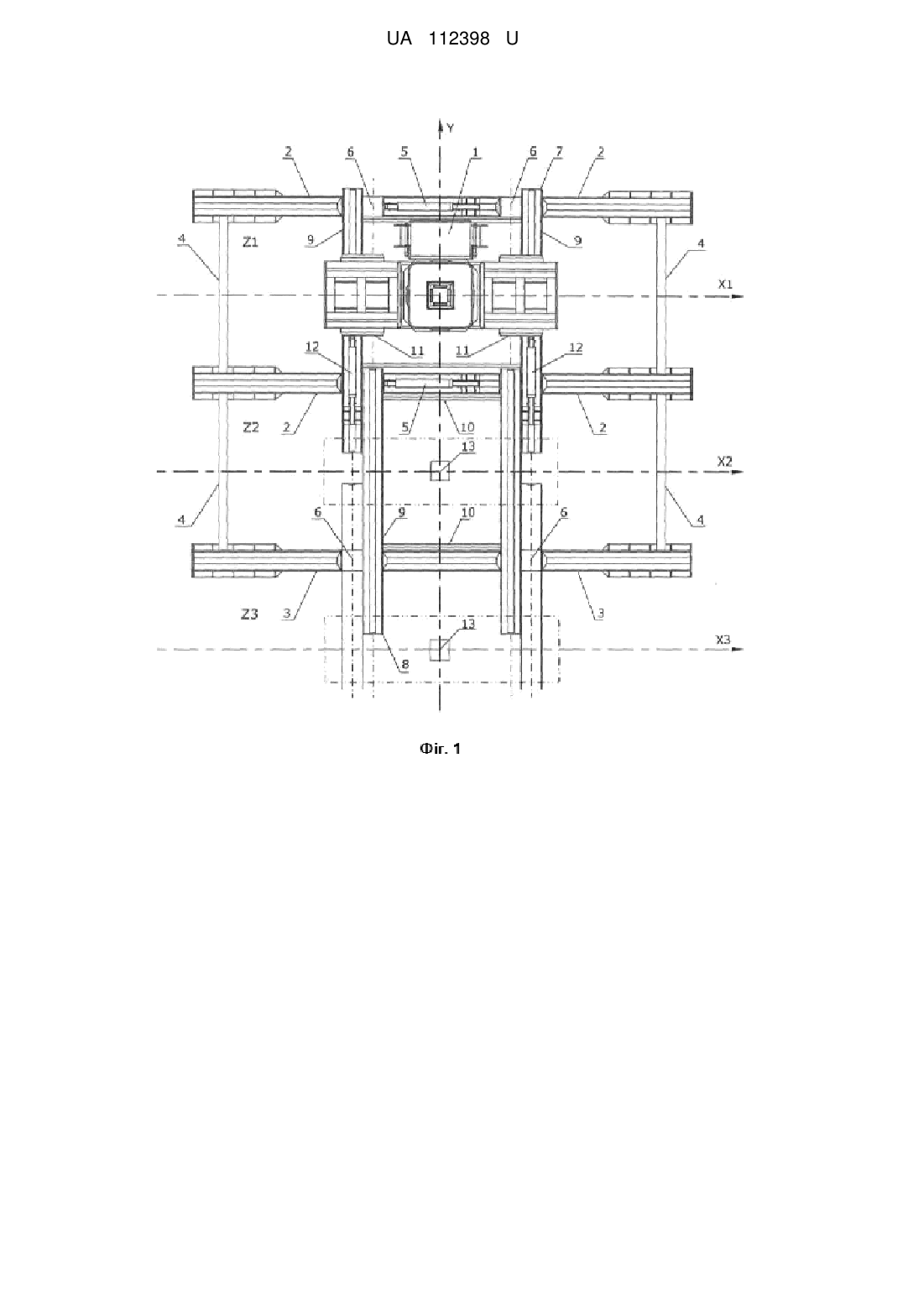
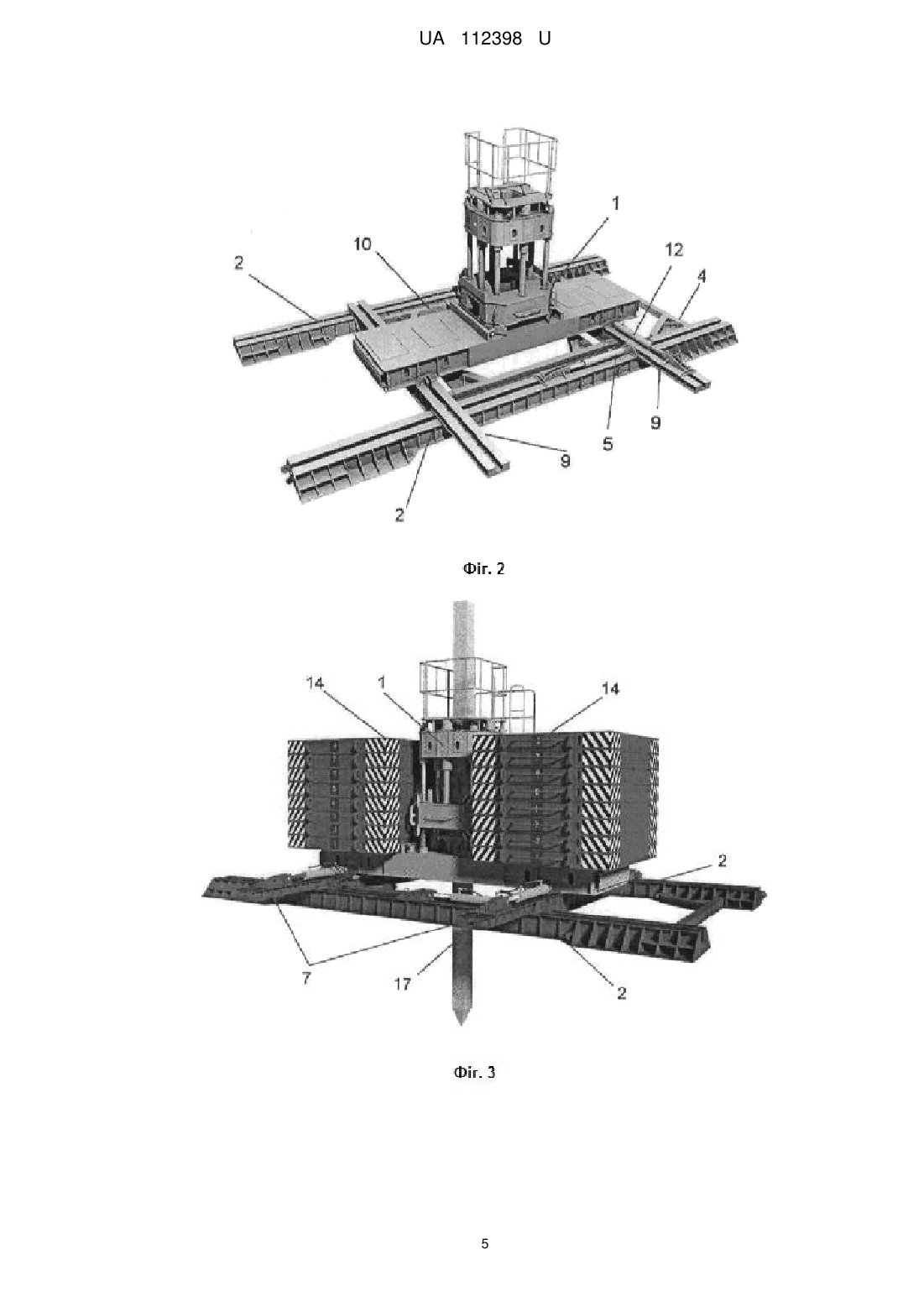
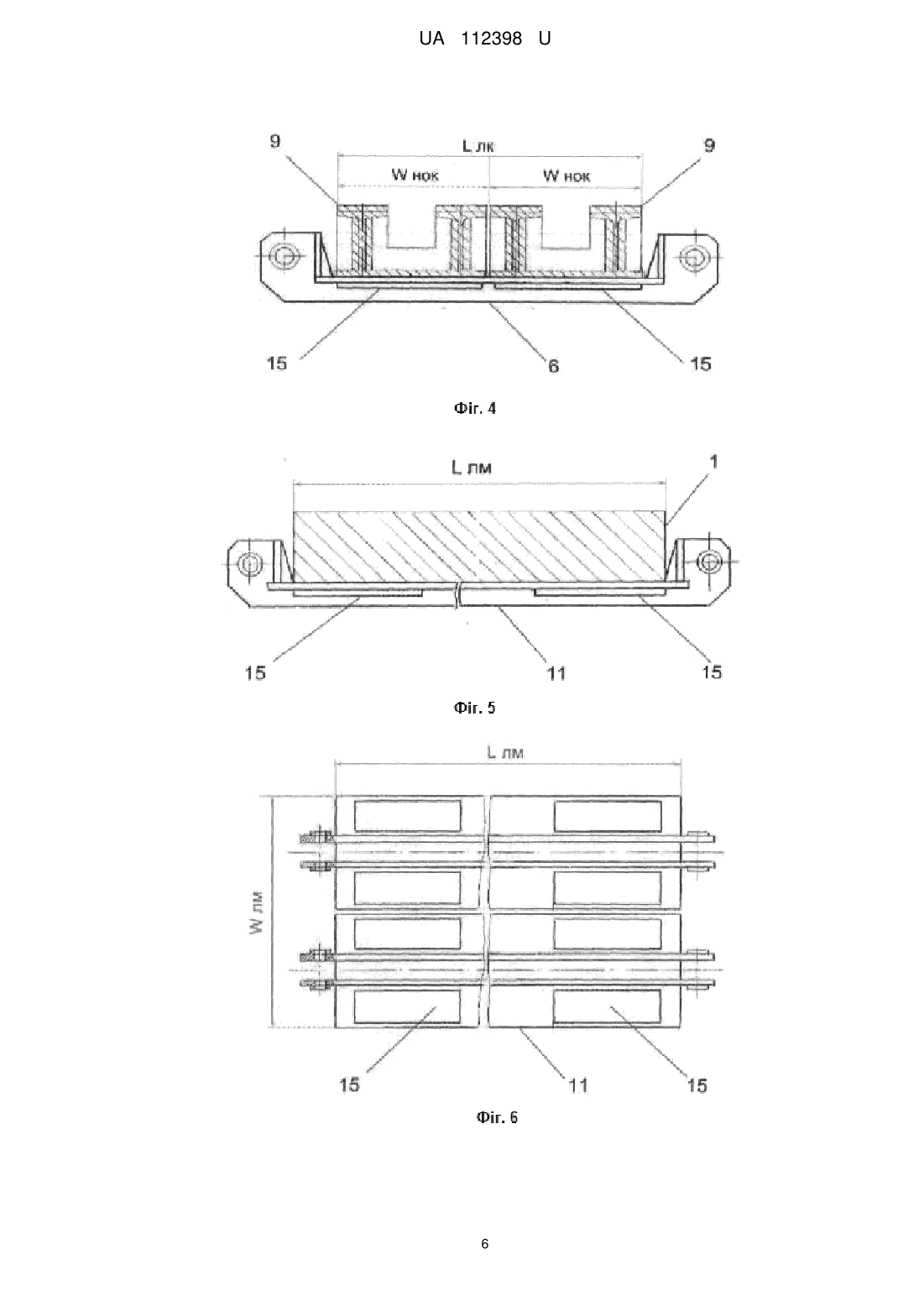
Реферат: Система для вдавлювання паль містить пристрій для вдавлювання паль, виконаний у вигляді гідравлічної палевдавлюючої машини, і механізм для переміщення палевдавлюючої машини, який включає в себе агрегатний модуль і гідроциліндри для примусового переміщення палевдавлюючої машини. Агрегатний модуль пристосований для установлення на ньому палевдавлюючої машини з можливістю її переміщення по ньому у двох взаємно перпендикулярних поздовжньому і поперечному напрямках і виконаний у вигляді рамної конструкції, що утворена поздовжніми напрямними опорами, які сполучені між собою з'єднувальними балками, та основної каретки, яка установлена на зазначену рамну конструкцію агрегатного модуля з можливістю переміщення по ній палевдавлюючої машини у поздовжньому і поперечному напрямках. Крім цього, система містить додаткову поздовжню напрямну опору, сполучену з одною із поздовжніх напрямних опор модуля за допомогою додаткових з'єднувальних балок, допоміжну каретку, яка установлена на поздовжню напрямну опору агрегатного модуля, і додаткову напрямну опору. При цьому ширина допоміжної каретки менше ширини основної каретки, система також містить лижі для переміщення палевдавлюючої машини і лижі для переміщення кареток. UA 112398 U (54) СИСТЕМА ДЛЯ ВДАВЛЮВАННЯ ПАЛЬ UA 112398 U UA 112398 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до будівельної галузі і може бути використана при улаштуванні пальових фундаментів із застосуванням систем для вдавлювання паль. Відома система для вдавлювання паль при улаштовуванні пальових фундаментів, що містить пристрій для вдавлювання паль, виконаний у вигляді гідравлічної палевдавлюючої машини, і механізм для переміщення палевдавлюючої машини, який включає в себе щонайменше два модулі: один агрегатний і один допоміжний. Кожен модуль пристосований для установлення на ньому палевдавлюючої машини з можливістю її переміщення в двох взаємно перпендикулярних напрямках. Модулі виконані з можливістю послідовного з'єднання один з одним з можливістю переміщення палевдавлюючої машини з одного модуля на інший при русі по пальовому полю в поздовжньому напрямку. Для руху машини в поперечному напрямку модулі установлюються паралельно один одному. Це дає можливість нарощувати опорний шлях для переміщення палевдавлюючої машини по будівельному майданчику в будь-якому з двох взаємно перпендикулярних напрямках (див. патент України на винахід № 93343). Дана система вибрана прототипом. Прототип і система, що заявляється, мають наступні спільні ознаки: - пристрій для вдавлювання паль виконаний у вигляді гідравлічної палевдавлюючої машини; - механізм для переміщення палевдавлюючої машини, який включає в себе агрегатний модуль і гідроциліндри для примусового переміщення палевдавлюючої машини; - агрегатний модуль пристосований для установлення на ньому палевдавлюючої машини з можливістю її переміщення на ньому у двох взаємно перпендикулярних поздовжньому і поперечному напрямках; - агрегатний модуль виконаний у вигляді рамної конструкції, що утворена поздовжніми напрямними опорами, які сполучені між собою з'єднувальними балками, та основної каретки; - основна каретка установлена на рамну конструкцію агрегатного модуля з можливістю переміщення по ній палевдавлюючої машини у поздовжньому і поперечному напрямках. Але система за прототипом має наступні недоліки. 1. Вузол стикування модулів (при русі палевдавлюючої машини в поздовжньому напрямку) виконаний з використанням болтів недостатньо надійний. 2. Стійкість конструкції системи недостатня при переміщенні палевдавлюючої машини з основного модуля на додатковий (при паралельному з'єднанні) особливо на слабких, водонасичених ґрунтах. 3. Неможливість послідовного стикання модулів на важкодоступних майданчиках (в зоні щільної історичної забудови, в зсувних зонах, при гідротехнічних роботах). 4. Паралельне з'єднання модулів (при русі палевдавлюючої машини в поздовжньому напрямку) не забезпечує безперервність модульної сітки та основних технологічних операцій, що робить автоматизацію робіт неможливою. Це призводить до зниження продуктивності, точності (технологічної і позиційної), збільшення енерго- і трудовитрат. В основу корисної моделі поставлено задачу розробити систему для вдавлювання паль, в якій шляхом введення додаткових конструкційних елементів забезпечити можливість багаторазово використовувати складові стандартні елементи системи в різних компоновках і в зв'язку з умовами будівництва, які змінюються. Поставлена задача вирішена в системі для вдавлювання паль, що містить пристрій для вдавлювання паль, виконаний у вигляді гідравлічної палевдавлюючої машини, і механізм для переміщення палевдавлюючої машини, який включає в себе агрегатний модуль і гідроциліндри для примусового переміщення палевдавлюючої машини, причому агрегатний модуль пристосований для установлення на ньому палевдавлюючої машини з можливістю її переміщення по ньому у двох взаємно перпендикулярних поздовжньому і поперечному напрямках і виконаний у вигляді рамної конструкції, що утворена поздовжніми напрямними опорами, які сполучені між собою з'єднувальними балками, та основної каретки, яка установлена на зазначену рамну конструкцію агрегатного модуля з можливістю переміщення по ній палевдавлюючої машини у поздовжньому і поперечному напрямках, яка, згідно з корисною моделлю, містить додаткову поздовжню напрямну опору, сполучену з одною із поздовжніх напрямних опор модуля за допомогою додаткових з'єднувальних балок, допоміжну каретку, яка установлена на поздовжню напрямну опору агрегатного модуля, і додаткову напрямну опору, при цьому ширина допоміжної каретки менше ширини основної каретки, система також містить лижі для переміщення палевдавлюючої машини і лижі для переміщення кареток. Крім цього, довжина кожної лижі для переміщення кареток дорівнює ширині кожної лижі для переміщення палевдавлюючої машини і ширині двох поперечних напрямних опор каретки. 1 UA 112398 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель, що заявляється, пояснюється кресленнями, на яких показано: фіг. 1 - схема системи для вдавлювання паль; фіг. 2 - схема агрегатного модуля системи; фіг. 3 - агрегатний модуль з комплектом анкерних вантажів; фіг. 4 - лижа для переміщення кареток, вигляд збоку; фіг. 5 - лижа для переміщення палевдавлюючої машини, вигляд збоку; фіг. 6 - лижа для переміщення палевдавлюючої машини, вигляд знизу; фіг. 7 - швидкорознімне центруюче з'єднання; фіг. 8 - схема улаштовування фундаментів із застосуванням системи для вдавлювання паль. Система для вдавлення паль містить палевдавлюючу машину 1, поздовжні напрямні опори 2, додаткову напрямну опору 3, з'єднувальні балки модуля 4 (використовують за необхідності), гідроциліндри поздовжнього переміщення 5, лижі для переміщення кареток 6, каретку основну 7, каретку допоміжну 8, поперечну напрямну опору каретки 9, з'єднувальні балки кареток 10, лижі для переміщення палевдавлюючої машини 11, гідроциліндри поперечного переміщення 12. Ширина кожної лижі 11 для переміщення палевдавлюючої машини 1 (W лм) дорівнює довжині лижі для переміщення основної 7 і допоміжної 8 кареток (L лк). Довжина кожної лижі для переміщення основної 7 і 8 допоміжної кареток дорівнює ширині двох поперечних направляючих опор каретки (нок) 9. W лм = L лк = 2W нок. Для ілюстрації роботи системи на кресленнях показано: проектне положення паль 13, внутрішній координаційний простір модуля (операційна зона палевдавлюючої машини 1) – Z1, Z2, Z3, Z4, анкерні вантажі 14, антифрикційні накладки 15, паля інвентарна 16, вдавлювані палі 17, палі, вдавлені на проектну відмітку, 18, вузол стикування модулів 19, кран 20, додаткове технологічне обладнання 21 та модульна сітка системи 22. Улаштовування пальових фундаментів із застосуванням системи для вдавлення паль, що заявляється, здійснюється у наступному порядку. I. Спочатку здійснюється складання і монтаж агрегатного модуля системи, а саме: установка поздовжніх напрямних опор 2, з'єднувальних балок 4, лиж каретки 6 і гідроциліндрів поздовжнього переміщення 5. При цьому контролюються координаційні осі (Χ, Υ) споруди, прив'язка до модульної сітки споруди. II. Збірка основної 7 і допоміжної 8 кареток. Установка поперечних напрямних опор каретки 9, з'єднувальних балок кареток 10, установка лижі для переміщення палевдавлюючої машини 11 і гідроциліндрів поперечного переміщення 12. III. Установлення основної каретки 7 на повздовжні напрямні опори 2 модуля. Установка палевдавлюючої машини 1 на основну каретку 7. Підключення гідросистеми модуля до палевдавлюючої машини 1. Анкерування. Установка анкерних вантажів на вантажну раму палевдавлюючої машини 1. Перевірка горизонтальності палевдавлюючої машини 1 після анкерування. IV. Вдавлювання паль в координаційному просторі агрегатного модуля Z1. Палевдавлююча машина 1 переміщається на позначку вдавлювання палі за допомогою гідроциліндрів поздовжнього 5 і поперечного 12 переміщення. Вдавлювання палі здійснюється наступним чином. Паля подається краном 20 в напрямну пастку палевдавлюючої машини 1, центрується в механізмі затиску і вдавлюється в ґрунт в автоматичному або ручному режимах до досягнення проектної позначки або контрольного зусилля вдавлення. Для занурення палі нижче поверхні землі використовується металева інвентарна паля 16. Далі здійснюється переміщення палевдавлюючої машини 1 на позначку вдавлювання чергової палі. Паралельно основному процесу або після завершення вдавлювання всіх паль, розташованих в координаційному просторі модуля (операційній зоні палевдавлюючої машини Z1), виконується нарощування опорної системи переміщення. Для цього додаткова напрямна опора 3 установлюється краном 20 на ґрунт таким чином, щоб сформувався новий координаційний (модульний) простір Z2, установлюються лижі для переміщення кареток 6, з'єднувальні балки 4. При цьому контролюються міжосьові відстані модуля, координаційні осі (Χ, Υ) споруди, прив'язка модульної сітки системи 22 до модульної сітки споруди. Допоміжна каретка 8 установлюється на лижі для переміщення кареток 6, які розташовані на напрямних опорах 2 і 3. Палевдавлююча машина 1 переміщується в операційний простір Z2. Для цього краном 20 переставляються гідроциліндри поперечного переміщення 12 з основної 2 UA 112398 U 5 10 15 20 25 30 35 40 45 50 55 каретки 7 на допоміжну каретку 8. Переміщення палевдавлюючої машини 1 за допомогою гідроциліндрів поперечного переміщення 12 з основної каретки 7 на допоміжну 8. Перестановка гідроциліндра поздовжнього переміщення 5 з крайньої поздовжньої напрямної опори 2 на додаткову напрямну опору 3. Вдавлювання паль 13 в координаційному просторі Z2 здійснюється аналогічно тому, як в операційному просторі Z1. Після вдавлення всіх паль в операційному просторі Z2 здійснюється перестановка (нарощування) опорної системи. Операція може виконуватися паралельно основному процесу. Зняття основної каретки 7 з поздовжніх напрямних опор 2. Перестановка крайньої поздовжньої напрямної опори 2 по осі Y, установка основної каретки 7 на напрямні опори 3 і 2. Перестановка гідроциліндрів поперечного переміщення 12 з допоміжної каретки 8 на основну каретку 7. Переміщення палевдавлюючої машини 1 з допоміжної каретки 8 на основну каретку 7. Перестановка гідроциліндра поздовжнього переміщення 5. Вдавлювання паль 13 в координаційному просторі Z3 здійснюється аналогічно тому, як в операційному просторі Z2. Після завершення роботи здійснюється демонтаж системи, що включає операції з розвантаження палевдавлюючої машини 1 від анкерних вантажів 14, зняття палевдавлюючої машини 1 з каретки, зняття основної 7 і допоміжної 8 кареток з модуля. Демонтаж основної 7 і допоміжної 8 кареток. Демонтаж модулів. Варіанти здійснення улаштовування пальових фундаментів. При необхідності руху палевдавлюючої машини 1 по пальовому полю уздовж осі X здійснюється послідовне пристикування додаткового модуля, включаючи його збірку і монтаж (аналогічно тому, як описано в прототипі). Рух палевдавлюючої машини 1 по пальовому полю уздовж осі X здійснюється методом послідовної перестикування модулів. При цьому використання вузлів стикування модулів 19, виконаних у вигляді швидкорознімного центруючого з'єднання, забезпечує позиційну точність і енергозбереження за рахунок зниження навантаження на кран 20, зниження машинного часу і витрат праці робітників. Допоміжна каретка 8 може бути використана для розміщення на ній додаткового технологічного обладнання (бурового верстата, пристрою гідророзмиву, пристрою для зрубування голів паль, пристрою для улаштовування колон зі щебеню і гравію, геотермальних паль і т. п.) 21 з можливістю її синхронного переміщення разом з основною кареткою 7 по модульній сітці системи 22, що істотно підвищує ефективність і відкриває можливість автоматизації робіт по улаштовуванню пальових фундаментів. Напрямні опори модуля 2 і 3 можуть бути використані для розміщення на них, у складі системи, будівельного обладнання з незалежною гідросистемою (будівельного 3D-принтера, кранового маніпулятора, механізму для пристрою геотермальних паль). ФОРМУЛА КОРИСНОЇ МОДЕЛІ 1. Система для вдавлювання паль, що містить пристрій для вдавлювання паль, виконаний у вигляді гідравлічної палевдавлюючої машини, і механізм для переміщення палевдавлюючої машини, який включає в себе агрегатний модуль і гідроциліндри для примусового переміщення палевдавлюючої машини, причому агрегатний модуль пристосований для установлення на ньому палевдавлюючої машини з можливістю її переміщення по ньому у двох взаємно перпендикулярних поздовжньому і поперечному напрямках і виконаний у вигляді рамної конструкції, що утворена поздовжніми напрямними опорами, які сполучені між собою з'єднувальними балками, та основної каретки, яка установлена на зазначену рамну конструкцію агрегатного модуля з можливістю переміщення по ній палевдавлюючої машини у поздовжньому і поперечному напрямках, яка відрізняється тим, що містить додаткову поздовжню напрямну опору, сполучену з одною із поздовжніх напрямних опор модуля за допомогою додаткових з'єднувальних балок, допоміжну каретку, яка установлена на поздовжню напрямну опору агрегатного модуля, і додаткову напрямну опору, при цьому ширина допоміжної каретки менше ширини основної каретки, система також містить лижі для переміщення палевдавлюючої машини і лижі для переміщення кареток. 2. Система для вдавлювання паль за п. 1, яка відрізняється тим, що довжина кожної лижі для переміщення кареток дорівнює ширині кожної лижі для переміщення палевдавлюючої машини і ширині двох поперечних напрямних опор каретки. 3 UA 112398 U 4 UA 112398 U 5 UA 112398 U 6 UA 112398 U Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
МПК / Мітки
МПК: E02D 7/20
Мітки: паль, вдавлювання, система
Код посилання
<a href="https://ua.patents.su/9-112398-sistema-dlya-vdavlyuvannya-pal.html" target="_blank" rel="follow" title="База патентів України">Система для вдавлювання паль</a>
Система для вдавлювання паль
Номер патенту: 93343
Опубліковано: 10.02.2011
Автори: Вакулін Ніколай Анатольєвіч, Мещеряков Георгій Миколайович
МПК: E02D 7/20
Мітки: вдавлювання, система, паль
Формула / Реферат:
1. Система для вдавлювання паль, що містить пристрій для вдавлювання паль, виконаний у вигляді палевдавлюючої машини, і механізм для переміщення машини, який включає в себе, щонайменше, два модулі, призначені для встановлення на них палевдавлюючої машини з можливістю її переміщення, та гідроциліндри для примусового переміщення палевдавлюючої машини, яка відрізняється тим, що кожен модуль пристосований для встановлення на ньому одному...
Система для вдавлювання паль
Номер патенту: 13317
Опубліковано: 15.03.2006
Автори: Мещеряков Георгій Миколайович, Вакулін Ніколай Анатольєвіч
МПК: E02D 7/20
Мітки: паль, вдавлювання, система
Формула / Реферат:
1. Система для вдавлювання паль, що містить пристрій для вдавлювання паль і механізм для переміщення даного пристрою, яка відрізняється тим, що пристрій для вдавлювання паль виконаний у вигляді палевдавлювальної машини, а механізм для переміщення пристрою для вдавлювання паль виконаний у вигляді двох і більше модулів, на яких установлена палевдавлювальна машина з можливістю її переміщення у подовжньому або поперечному напрямках на одному з...
Пристрій для вдавлювання паль і/або інших будівельних конструкцій та спосіб вдавлювання за допомогою цього пристрою
Номер патенту: 27634
Опубліковано: 15.09.2000
Автор: Кашка Борис Зіновійович
МПК: E02D 7/20
Мітки: пристрій, цього, будівельних, інших, паль, вдавлювання, спосіб, конструкцій, допомогою, пристрою
Текст:
...досягають розширення галузі застосування, зменшення трудомісткості, енерговитрат та часу споруджування фундаментів. Поставлена задача вирішується тим, що у способі вдавлювання паль і/або інших будівельних конструкцій, який складається з встановлення у зоні вдавлювання пристрою для вдавлювання, анкеровки цього пристрою, підняття та встановлення вдавлюваної конструкції на точку занурення, підведення механізму вдавлювання до головки...
Спосіб вдавлювання паль
Номер патенту: 102493
Опубліковано: 26.10.2015
Автори: Срібний Віталій Олексійович, Сидора Анатолій Миколайович
МПК: E02D 7/20, E02D 13/04
Мітки: вдавлювання, спосіб, паль
Формула / Реферат:
1. Спосіб вдавлювання паль, що включає встановлення у зоні вдавлювання пристрою для вдавлювання паль, буріння свердловини при необхідності, підняття та встановлення вдавлювальної конструкції на точку заглиблення, підведення механізму вдавлювання до головки вдавлювальної конструкції та вдавлювання, який відрізняється тим, що на підготованій основі майданчика укладають шляхові плити, на які укладають підкранову рейкову колію, на яку...
Спосіб вдавлювання паль
Номер патенту: 98115
Опубліковано: 10.04.2015
Автори: Срібний Віталій Олексійович, Сидора Анатолій Миколайович
МПК: E02D 7/20
Мітки: спосіб, паль, вдавлювання
Формула / Реферат:
1. Спосіб вдавлювання паль, що передбачає встановлення у зоні вдавлювання пристрою для вдавлювання паль, буріння свердловини, підняття та встановлення вдавлювальної конструкції на точку занурення, підведення механізму вдавлювання до головки вдавлювальної конструкції та вдавлювання, який відрізняється тим, що на підготованій основі майданчика укладають шляхові плити, на які укладають під нівелір підкранову рейкову колію, на яку встановлюють...
Попередній патент: Спосіб улаштовування пальових фундаментів
Наступний патент: Спосіб профілактики передачі інфекції при медичних дослідженнях з використанням ендоскопа
Випадковий патент: Фільтр для тютюнового диму