Система для вдавлювання паль
Номер патенту: 93343
Опубліковано: 10.02.2011
Автори: Мещеряков Георгій Миколайович, Вакулін Ніколай Анатольєвіч
Формула / Реферат
1. Система для вдавлювання паль, що містить пристрій для вдавлювання паль, виконаний у вигляді палевдавлюючої машини, і механізм для переміщення машини, який включає в себе, щонайменше, два модулі, призначені для встановлення на них палевдавлюючої машини з можливістю її переміщення, та гідроциліндри для примусового переміщення палевдавлюючої машини, яка відрізняється тим, що кожен модуль пристосований для встановлення на ньому одному палевдавлюючої машини з можливістю її переміщення по ньому у двох взаємно перпендикулярних подовжньому та поперечному напрямках, при цьому модулі виконані з можливістю рознімного з'єднання між собою із можливістю переміщення машини з одного модуля на інший у будь-якому із зазначених подовжнього та поперечного напрямків.
2. Система за п. 1, яка відрізняється тим, що рама палевдавлюючої машини з кожної із чотирьох її сторін пристосована для кріплення до неї гідроциліндрів механізму для переміщення машини.
3. Система за будь-яким із попередніх пунктів, яка відрізняється тим, що між рамою палевдавлюючої машини і ковзними поверхнями модуля розміщені вставки із антифрикційного матеріалу.
4. Система за будь-яким із попередніх пунктів, яка відрізняється тим, що рознімне з'єднання модулів між собою виконано із використанням болтів або інших подібних засобів.
5. Система за будь-яким із попередніх пунктів, яка відрізняється тим, що модулі виконані ідентичними та взаємозамінними один з одним.
6. Система за будь-яким із попередніх пунктів, яка відрізняється тим, що корпуси гідроциліндрів механізму для переміщення машини жорстко з'єднані з рамою палевдавлюючої машини, а штоки гідроциліндрів через башмаки сполучені з корпусом модуля.
7. Система за будь-яким із попередніх пунктів, яка відрізняється тим, що модуль виконаний у вигляді рамної конструкції, яка утворена поздовжніми балками, які сполучені між собою поперечними перемичками, та каретки, яка встановлена на зазначену рамну конструкцію із можливістю переміщення у зазначеному подовжньому напрямку, при цьому каретка пристосована для встановлення на ній палевдавлюючої машини з можливістю її переміщення по ній у зазначеному поперечному напрямку.
Текст
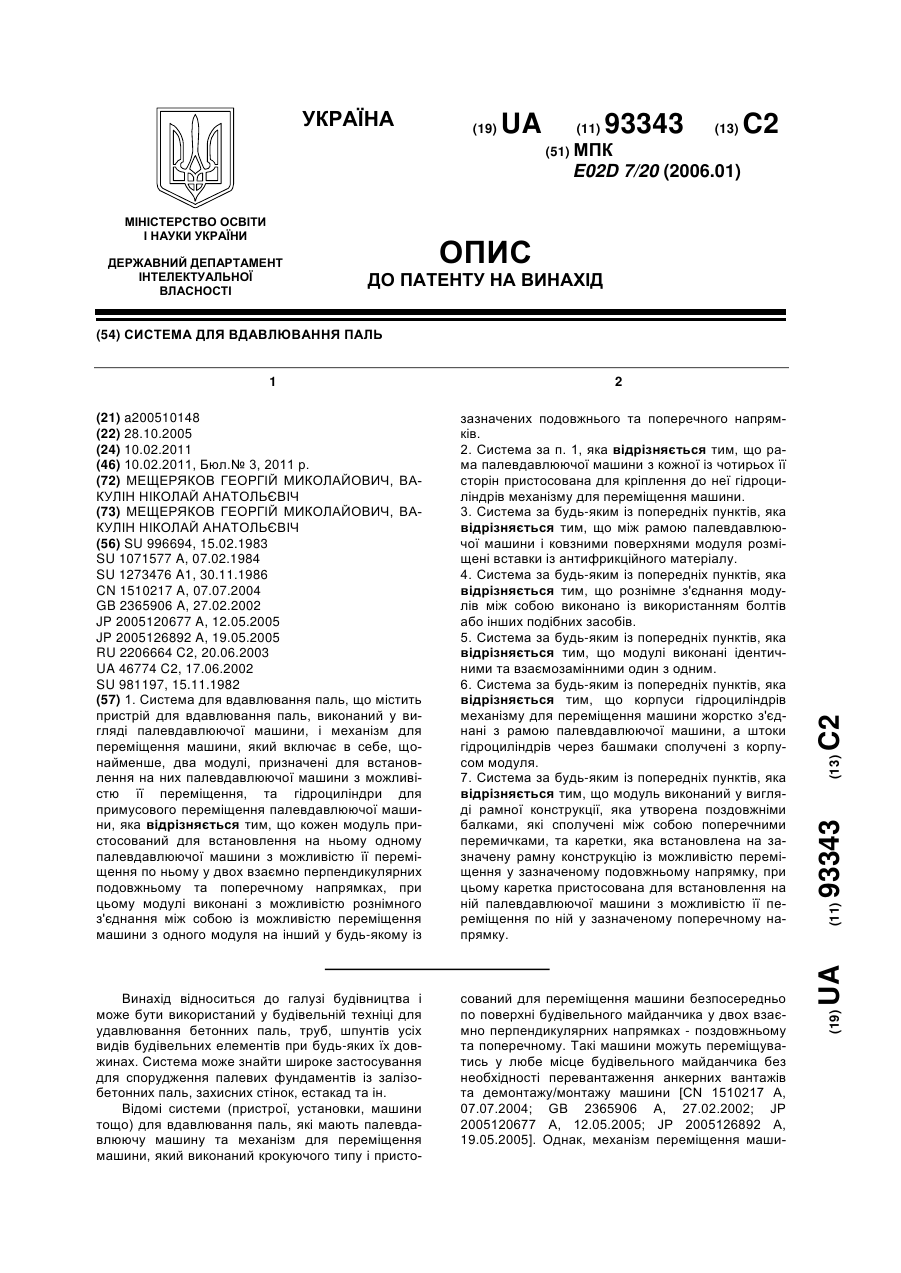
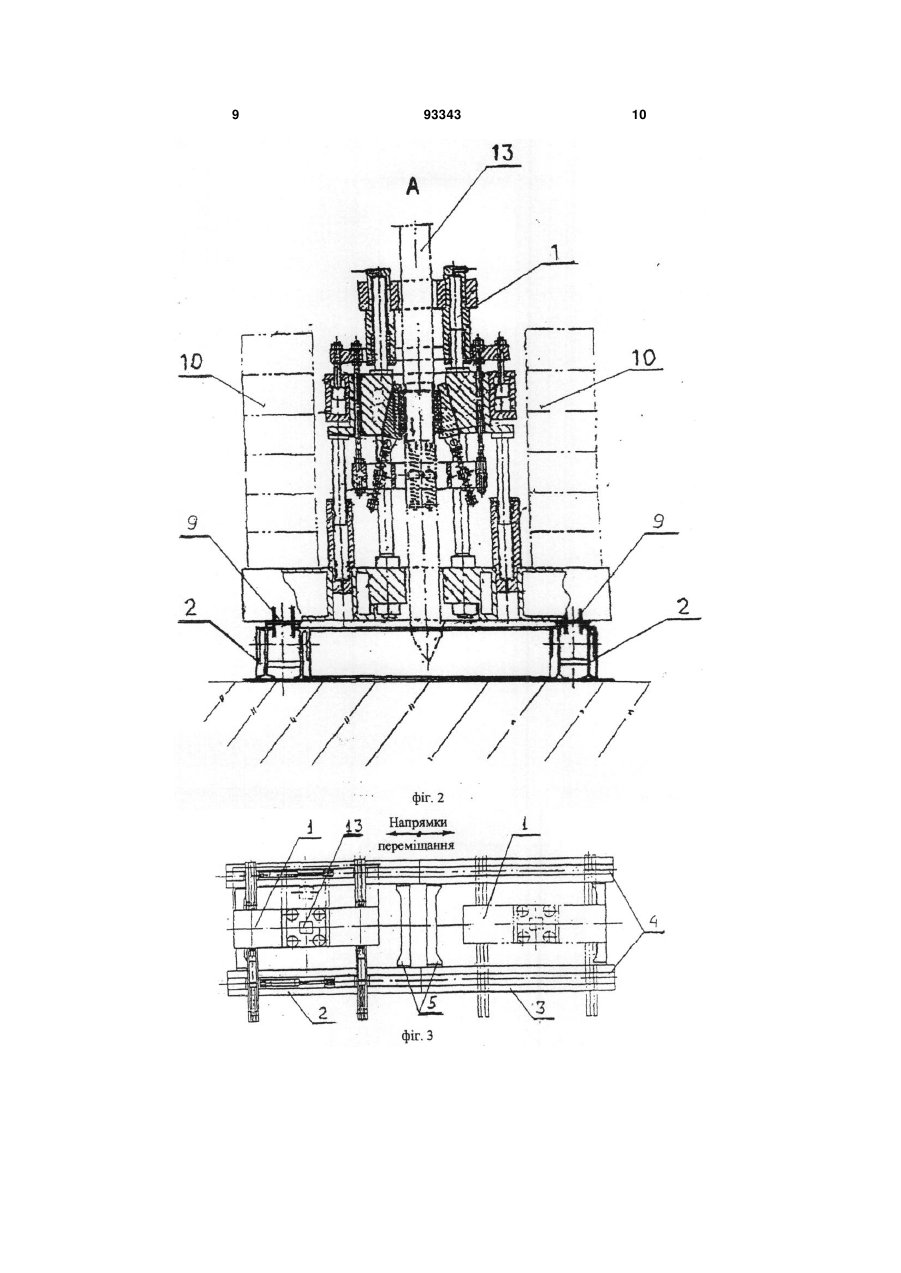
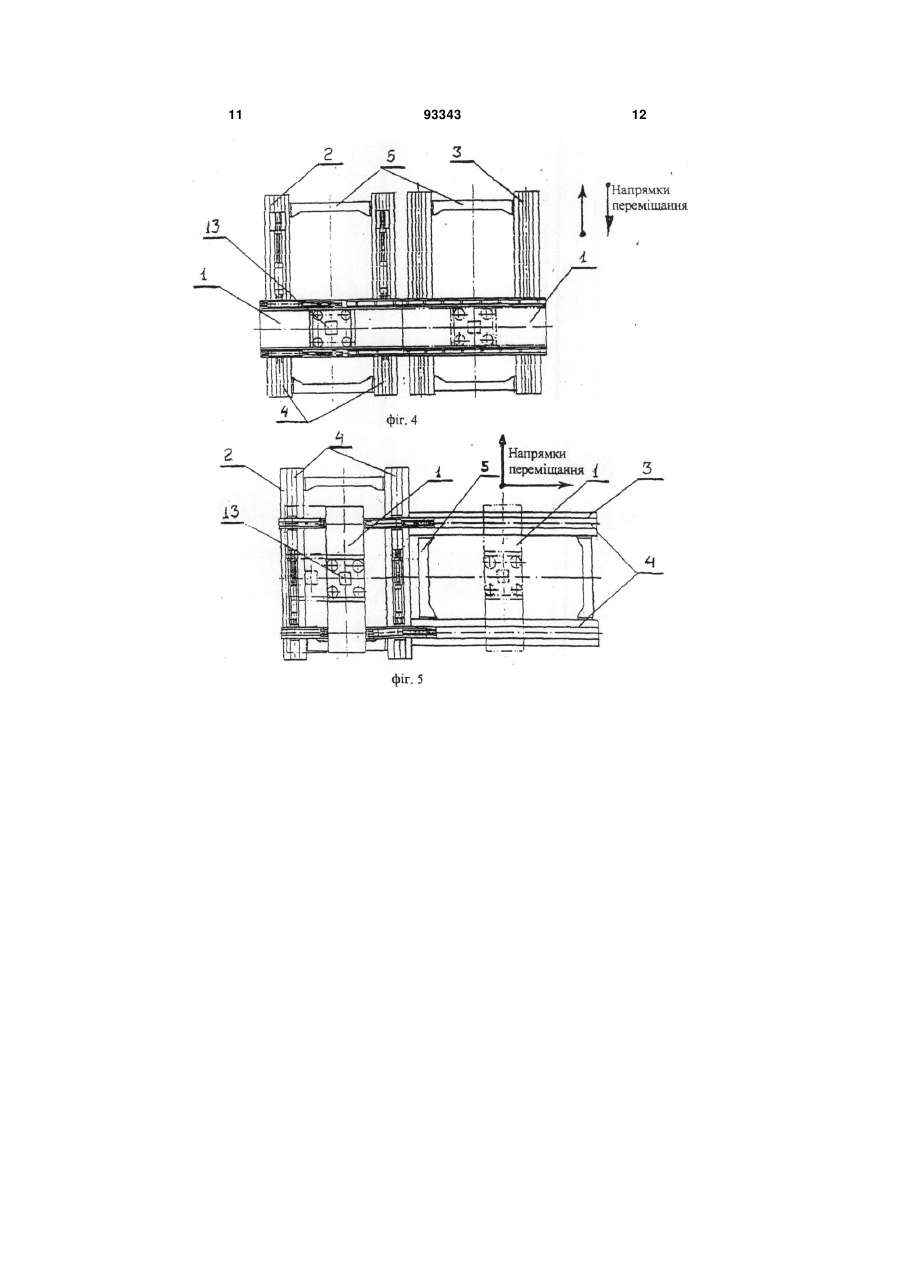
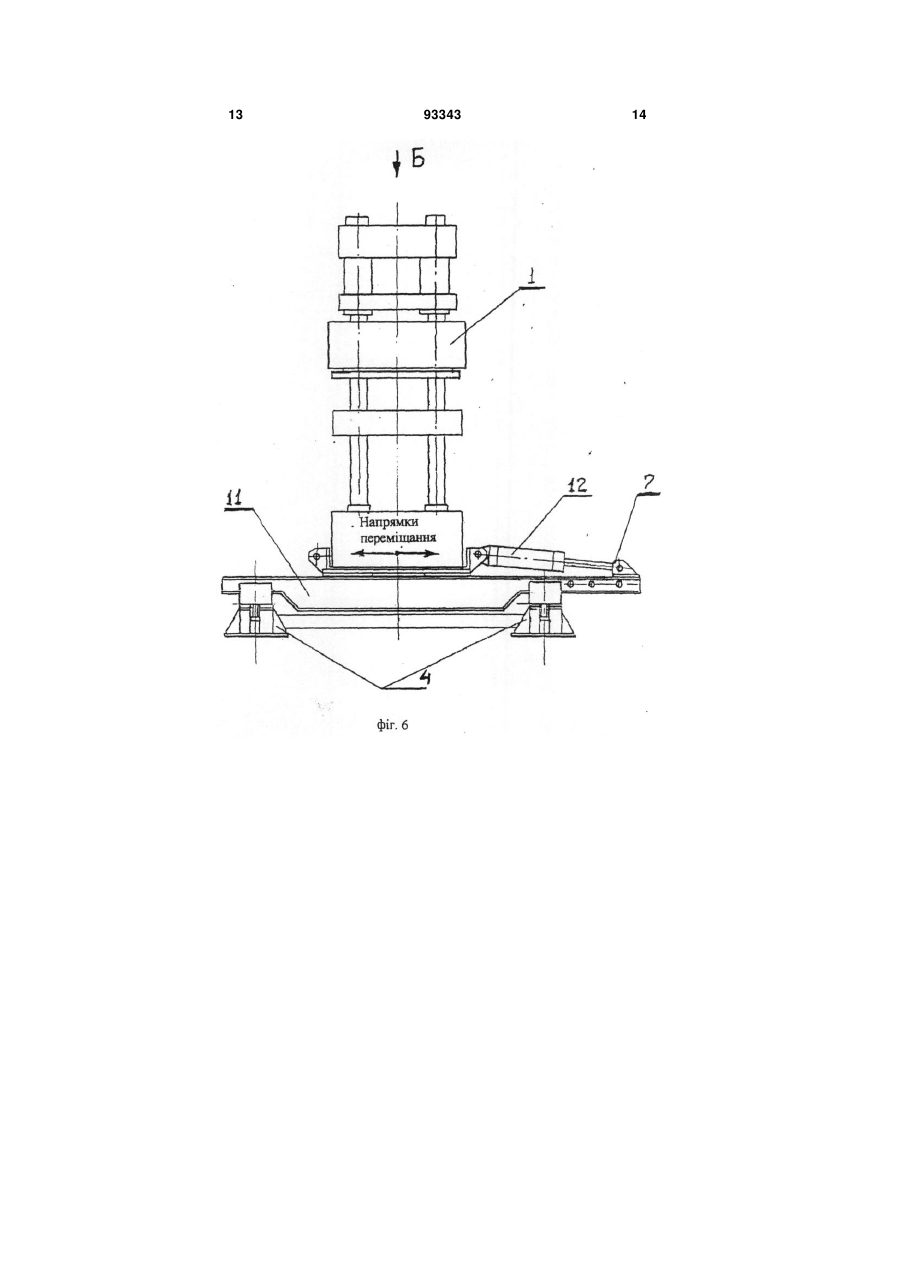
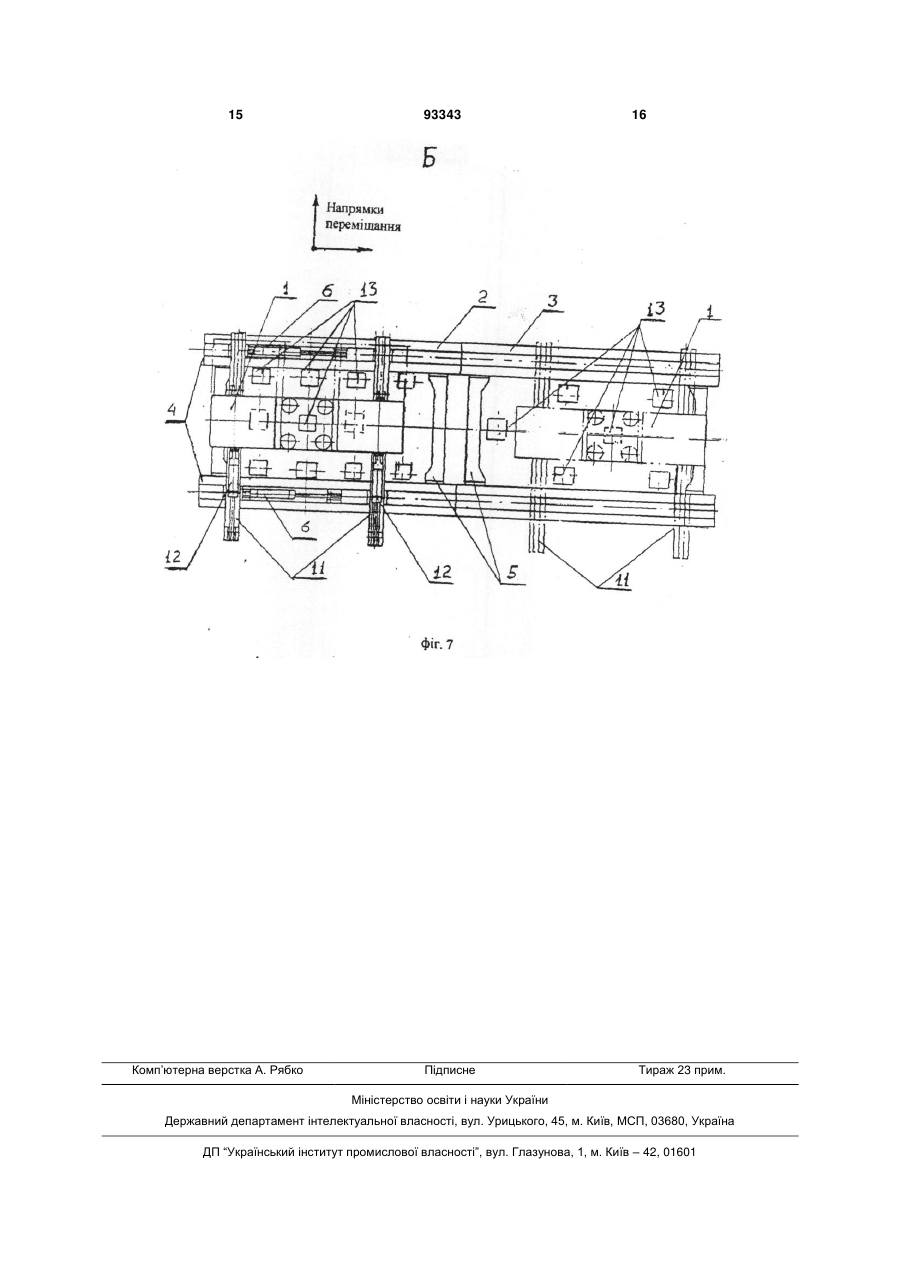
1. Система для вдавлювання паль, що містить пристрій для вдавлювання паль, виконаний у вигляді палевдавлюючої машини, і механізм для переміщення машини, який включає в себе, щонайменше, два модулі, призначені для встановлення на них палевдавлюючої машини з можливістю її переміщення, та гідроциліндри для примусового переміщення палевдавлюючої машини, яка відрізняється тим, що кожен модуль пристосований для встановлення на ньому одному палевдавлюючої машини з можливістю її переміщення по ньому у двох взаємно перпендикулярних подовжньому та поперечному напрямках, при цьому модулі виконані з можливістю рознімного з'єднання між собою із можливістю переміщення машини з одного модуля на інший у будь-якому із C2 2 (19) 1 3 ни крокуючого типу занадто складний, а відтак недостатньо надійний. Відома машина для вдавлювання паль, яка має механізм переміщення машини, який включає в себе, рельсовий шлях, який складений із декількох пристикованих одна до одної ділянок (модулів) і пристосований для встановлення на нього палевдавлюючої машини з можливістю її переміщення по ньому в одному напрямку та силовий привід для примусового переміщення палевдавлюючої машини. Механізм переміщення машини оснащений пристроєм для повороту розташованої під машиною ділянки рельсового шляху, що дозволяє змінювати напрямок переміщення машини і переміщувати машину у любе місце будівельного майданчика без необхідності перевантаження анкерних вантажів та демонтажу/монтажу машини [RU 2206664 С2, 20.06.2003]. Однак, механізм переміщення машини також занадто складний, а відтак недостатньо надійний. Відомі машини (пристрої) для вдавлювання паль, які мають механізм переміщення машини, який включає в себе опорне анкерне полотно, складене із двох розташованих паралельно один одному елементів (модулів), які пристосовані для встановлення на них палевдавлюючої машини з можливістю її переміщення по ним обом в одному (поздовжньому) напрямку та силовий привід для примусового переміщення палевдавлюючої машини. Такі машини можуть переміщуватись тільки в одному (поздовжньому) напрямку на відстань, яка обмежена довжиною опорного модуля [UA 46774 С2, 17.06.2002; UA 27634 С2, 15.09.2000]. Механізм переміщення цих машин має найпростішу конструкцію, але його функціональні можливості дуже обмежені, оскільки він не може забезпечити переміщення машини у любе місце будівельного майданчика без необхідності перевантаження анкерних вантажів та демонтажу/монтажу машини. Відомий пристрій для переміщення вантажу, який має декілька опорних секцій (модулів), кожна з яких пристосована для встановлення на ній одній вантажу з можливістю його переміщення по ній тільки у одному подовжньому напрямку. При цьому секції виконані з можливістю рознімного з'єднання (стикування) між собою із можливістю переміщення вантажу з однієї секції на іншу у зазначеному подовжньому напрямку. Це дозволяє переставляти секції, які звільнилися позаду вантажу, у положення попереду вантажу і таким чином необмежено нарощувати опорний шлях попереду вантажу для його переміщення на необмежену відстань при обмеженій кількості секцій [SU 981197, 15.11.1982]. Однак, відомий пристрій забезпечує переміщення вантажу тільки в одному подовжньому напрямку і не пристосований для зміни напрямку переміщення вантажу, чого недостатньо для переміщення вантажу у будь-яке місце будівельного майданчика. В основу винаходу поставлено задачу створити систему для вдавлювання паль, в якій при збереженні простоти, надійності та великої вантажопідйомності механізму переміщення палевдавлюючої машини розширені функціональні можливості цього механізму, які дозволяють пере 93343 4 міщувати машину у любе місце будівельного майданчика без необхідності перевантаження анкерних вантажів та демонтажу/монтажу машини. Ця задача вирішена тим, що у системі для вдавлювання паль, що містить пристрій для вдавлювання паль, виконаний у вигляді палевдавлюючої машини, і механізм для переміщення машини, який включає в себе, щонайменше, два модулі, призначені для встановлення на них палевдавлюючої машини з можливістю її переміщення, та гідроциліндри для примусового переміщення палевдавлюючої машини, згідно із винаходом кожен модуль пристосований для встановлення на ньому одному палевдавлюючої машини з можливістю її переміщення по ньому у двох взаємно перпендикулярних подовжньому та поперечному напрямках, при цьому модулі виконані з можливістю рознімного з'єднання (стикування) між собою із можливістю переміщення машини з одного модуля на інший у будь-якому із зазначених подовжнього та поперечного напрямків. Це дозволяє переставляти модуль, який звільнився позаду машини, у положення попереду машини і таким чином необмежено нарощувати опорний шлях попереду машини для її переміщення на необмежену відстань у будь-якому із двох взаємно перпендикулярних напрямків при обмеженій кількості модулів. Таким чином, маючи усього два модулі можливо переміщувати машину у будь-яке місце будівельного майданчику без необхідності перевантаження анкерних вантажів та демонтажу/монтажу машини. В окремих випадках здійснення чи використання винаходу зазначений технічний результат посилюється чи доповнюється іншими технічними результатами, що явним чином випливає із подальшого опису, тим що рама палевдавлюючої машини з кожної із чотирьох її сторін пристосована для кріплення до неї гідроциліндрів механізму для переміщення машини. Також тим, що між рамою палевдавлюючої машини і ковзними поверхнями модулю розміщені вставки із антифрикційного матеріалу. Також тим, що рознімне з'єднання модулів між собою, виконано із використанням болтів або інших подібних засобів. Також тим, що модулі виконані ідентичними та взаємозамінними один з одним. Також тим, що корпуси гідроциліндрів механізму для переміщення машини жорстко з'єднані з рамою палевдавлюючої машини, а штоки гідроциліндрів через башмаки сполучені з корпусом модуля. Також тим, що модуль виконаний у вигляді рамної конструкції, яка утворена поздовжніми балками, які сполучені між собою поперечними перемичками, та каретки, яка встановлена на зазначену рамну конструкцію із можливістю переміщення у зазначеному подовжньому напрямку, при цьому каретка пристосована для встановлення на ній палевдавлюючої машини з можливістю її переміщення по ній у зазначеному поперечному напрямку. В конкретному прикладі реалізації система містить палевдавлюючу машину, на яку видано па 5 тент України №42940. Але, можливі й інші варіанти реалізації системи. Система для вдавлювання паль зображена на кресленні, де: Фіг.1 - вигляд збоку; Фіг.2 - вигляд спереду; Фіг.3 - вигляд системи з двома модулями, розташованими в подовжньому напрямку; Фіг.4 - вигляд системи з двома модулями, розташованими паралельно; Фіг.5 - вигляд системи з двома модулями, розташованими поперечно; Фіг.6 - вигляд системи з кареткою; Фіг.7 - приклад схеми переміщення системи із застосуванням каретки в полі дії модуля. Система містить палевдавлюючу машину 1, яка установлена на механізм для її переміщання, який виконано у вигляді модулів 2, 3. Кожний модуль уявляє собою рамну конструкцію, яка складається з двох подовжніх балок-направляючих 4, сполучених між собою поперечними перемичками 5. Модулі 2, 3 сполучені між собою болтами або іншими засобами (на кресленні не показано), причому модуль 3 можна приєднати до модуля 2 в будь-якому місці: в подовжньому напрямку (Фіг.3), паралельно (Фіг.4) або поперечно (Фіг.5). Для пересування палевдавлюючої машини 1 по модулям 2, 3, система забезпечена двома гідроциліндрами 6. Корпус кожного гідроциліндра 6 жорстко сполучений з рамою (окремою позицією не показано) палевдавлюючої машини 1, при цьому корпуси гідроциліндрів 6 можуть бути приєднані до рами палевдавлюючої машини 1 з кожної з чотирьох сторін. Штоки гідроциліндрів 6 через башмаки 7 сполучені з корпусом модуля 2 або модуля 3, в залежності від того, на якому модулі установлена палевдавлююча машина 1. Порожнини гідроциліндрів 6 за допомогою гнучких трубопроводів 8 сполучені з керуючим золотником гідросистеми палевдавлюючої машини 1. Для зменшення тертя між рамою палевдавлюючої машини 1 і поверхнею модулів 2, 3 установлені проставки 9 з антифрикційного матеріалу. Модулі 2, 3 виконані повністю ідентичними і є взаємозамінними один з одним. Для ілюстрації роботи системи на кресленні (Фіг.2) зображена паля 13, яка підлягає вдавлюванню. Система може бути забезпечена кареткою 11 і додатковими гідроциліндрами 12. Робота системи забезпечується таким чином. Модуль 2 за допомогою вантажопідйомного крана установлюється на будівельний майданчик таким чином, щоб вісі палевого ряду на плані па 93343 6 левого поля співпадали з віссю А модуля 2. Після цього на модуль 2 установлюється палевдавлююча машина 1. Далі установлюють гідроциліндри 6, корпуси котрих сполучають з рамою палевдавлюючої машини 1, а штоки за допомогою башмаків 7 сполучають з рамою модуля 2. Вісь палевдавлюючої машини 1, за допомогою гідроциліндрів 6, виводиться на точку вдавлювання. Якщо ходу штока гідроциліндра 6 недостатньо, здійснюється перехват на крок переустановлення башмаків 7. За допомогою вантажопідйомного крана на платформу палевдавлюючої машини 1 з обох боків симетрично кладуть анкерні контрвантажі 10, загальна вага яких не менша, ніж зусилля вдавлювання палі, або перебільшує його. Краном в захват палевдавлюючої машини 1 подається паля 13. В робочі гідроциліндри палевдавлюючої машини 1 подається гідравлічна рідина і відбувається вдавлювання палі в ґрунт до необхідної позначки і з необхідним зусиллям вдавлювання, яке контролюється тарованим манометром. Після вдавлювання палі 13 палевдавлююча машина 1 переміщується на наступну позицію (точку вдавлювання наступної палі, яка знаходиться на тій самій вісі) гідроциліндрами 6. Вони можуть штовхати, або тягнути палевдавлюючу машину 1 за рахунок подання гідравлічної рідини у відповідну порожнину гідроциліндрів 6. Коли гідроциліндри 6 досягають краю модуля 2, вони можуть бути переставлені на протилежну сторону палевдавлюючої машини 1. Далі до модуля 2, в продовження його вісі, паралельно або поперек, приставляється за допомогою вантажопідйомного крана модуль 3. Після завершення вдавлювання всіх паль, які знаходяться в полі дії модуля 2, палевдавлююча машина 1 за допомогою гідроциліндрів 6 переводиться на модуль 3 або будь-який наступний модуль. Палевдавлююча машина 1 може також установлюватися на каретку 11 (Фіг.6), яка в свою чергу установлюється поперек вісі модуля й переміщується по ньому уздовж його вісі разом із палевдавлюючої машиною 1, як описано вище, за допомогою гідроциліндрів 6. У той же час палевдавлююча машина 1 за допомогою двох додаткових гідроциліндрів 12 (Фіг.6) може переміщуватися по каретці в напрямку, поперечному вісі модуля, що дає можливість вдавлювати палі по всій площі між балками-направляючими 4 модуля, наприклад, вдавлювати два й більше ряди паль, без розвантаження - завантаження контрвантажів, що підвищує продуктивність робіт. 7 93343 8 9 93343 10 11 93343 12 13 93343 14 15 Комп’ютерна верстка А. Рябко 93343 Підписне 16 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for pile driving in
Автори англійськоюMescheriakov Heorhii Mykolaiovych, Vakulin Nikolai Anatoliiovych
Назва патенту російськоюСистема для вдавливания свай
Автори російськоюМещеряков Георгий Николаевич, Вакулин Николай Анатольевич
МПК / Мітки
МПК: E02D 7/20
Мітки: система, вдавлювання, паль
Код посилання
<a href="https://ua.patents.su/8-93343-sistema-dlya-vdavlyuvannya-pal.html" target="_blank" rel="follow" title="База патентів України">Система для вдавлювання паль</a>
Система для вдавлювання паль
Номер патенту: 13317
Опубліковано: 15.03.2006
Автори: Мещеряков Георгій Миколайович, Вакулін Ніколай Анатольєвіч
МПК: E02D 7/20
Мітки: паль, система, вдавлювання
Формула / Реферат:
1. Система для вдавлювання паль, що містить пристрій для вдавлювання паль і механізм для переміщення даного пристрою, яка відрізняється тим, що пристрій для вдавлювання паль виконаний у вигляді палевдавлювальної машини, а механізм для переміщення пристрою для вдавлювання паль виконаний у вигляді двох і більше модулів, на яких установлена палевдавлювальна машина з можливістю її переміщення у подовжньому або поперечному напрямках на одному з...
Пристрій для вдавлювання паль і/або інших будівельних конструкцій та спосіб вдавлювання за допомогою цього пристрою
Номер патенту: 27634
Опубліковано: 15.09.2000
Автор: Кашка Борис Зіновійович
МПК: E02D 7/20
Мітки: допомогою, спосіб, вдавлювання, паль, інших, будівельних, пристрою, пристрій, конструкцій, цього
Текст:
...досягають розширення галузі застосування, зменшення трудомісткості, енерговитрат та часу споруджування фундаментів. Поставлена задача вирішується тим, що у способі вдавлювання паль і/або інших будівельних конструкцій, який складається з встановлення у зоні вдавлювання пристрою для вдавлювання, анкеровки цього пристрою, підняття та встановлення вдавлюваної конструкції на точку занурення, підведення механізму вдавлювання до головки...
Установка для вдавлювання паль

Номер патенту: 38633
Опубліковано: 12.01.2009
Автори: Соколов Олексій Олександрович, Снітко Владислав Миколайович, Снітко Микола Вікторович
МПК: E02D 7/00
Мітки: паль, вдавлювання, установка
Формула / Реферат:
1. Установка для вдавлювання паль, шпунта, труб та інших стержневих елементів, що містить пристрій для вдавлювання паль і пристрій для буріння лідерних свердловин, в якій пристрій для вдавлювання паль має корпус у вигляді вертикальної рами, рухому раму з натискним засобом, яка розташована з можливістю вертикального зворотно-поступального руху і має зв'язок з механізмом її підйому та опускання, з механізмом фіксації, фіксатори якого...
Машина для вдавлювання, випробування та витягування паль
Номер патенту: 77005
Опубліковано: 16.10.2006
Автори: Вакулін Анатолій Антонович, Мещеряков Микола Георгійович
МПК: E02D 33/00, E02D 11/00
Мітки: вдавлювання, машина, випробування, витягування, паль
Формула / Реферат:
Палевдавлювальна машина, яка містить станину із установленими на ній вертикальними напрямними, на яких встановлені з можливістю переміщення вдавлювальний і затискний механізми, яка відрізняється тим, що вона забезпечена додатковим затискним механізмом, який розміщено на вертикальних напрямних у верхній частині машини і який включає набір клинів, що установлені на внутрішній поверхні головки з можливістю переміщення по похилих планках, при...
Пристрій для вдавлювання паль

Номер патенту: 38634
Опубліковано: 12.01.2009
Автори: Соколов Олексій Олександрович, Снітко Владислав Миколайович, Снітко Микола Вікторович
МПК: E02D 7/20
Мітки: вдавлювання, пристрій, паль
Формула / Реферат:
1. Пристрій для вдавлювання паль, шпунта, труб та інших стержневих елементів, який містить базову конструкцію у вигляді платформи, на якій встановлений на візках вдавлювальний механізм, який має корпус у вигляді вертикальної рами, жорстко з'єднаної із зазначеними візками, натискну плиту, розташовану у вертикальній рамі з можливістю вертикального зворотно-поступального руху, і яка має зв'язок з механізмом її підйому та опускання, з механізмом...
Попередній патент: Професорсько-викладацька кафедра жабєєвих
Випадковий патент: Спосіб маркування вуглеводнів принаймні двома маркерними речовинами і спосіб їх детекції