Спосіб посадки літаків за віртуальними криволінійними глісадами в межах граничних траєкторій
Номер патенту: 112769
Опубліковано: 26.12.2016
Автори: Павлова Світлана Вадимівна, Павлов Вадим Володимирович, Волошенюк Дмитро Олександрович
Формула / Реферат
Спосіб посадки літаків за віртуальними криволінійними глісадами в межах граничних траєкторій, в якому визначають оптимальні підйомну силу, швидкість і кут нахилу траєкторії для забезпечення посадки з постійним зниженням і забезпечують роботу двигунів у режимі польотного малого газу, який відрізняється тим, що отримують дані від бортових систем літака і наземних диспетчерських центрів про поточний стан польоту, навколишнього середовища, кінцеву точку маршруту (місце приземлення), визначають фізичні та аеродинамічні параметри і характеристики літака, що дозволяють характеризувати нелінійності у поведінці літака і процес польоту, обробляють точну інформацію про стан польоту, навколишнє середовище і погодні умови, точку посадки літака (її координати, особливості місцевості та злітно-посадкової смуги), розраховують граничні області керованості літака, що характеризують можливості літака по зміні параметрів руху в кожний момент часу, визначають і враховують невизначеність та відхилення у положенні літака, застосовують адаптивні критерії оптимальності, призначені для забезпечення екологічності та економічності польоту, будують віртуальну криволінійну глісаду посадки літака в межах граничної траєкторії, яка потребує найменших ресурсів та потужностей літака, часу і відстані, необхідних для етапу польоту, починаючи від зниження з ешелону польоту до зупинки літака на злітно-посадковій смузі, проводять попереднє перевірочне моделювання згенерованої віртуальної криволінійної глісади для забезпечення належного рівня безпеки, здійснюють генерацію віртуальної криволінійної глісади посадкового зниження літака в масштабі реального часу для врахування всіх можливих змін у процесі польоту.
Текст
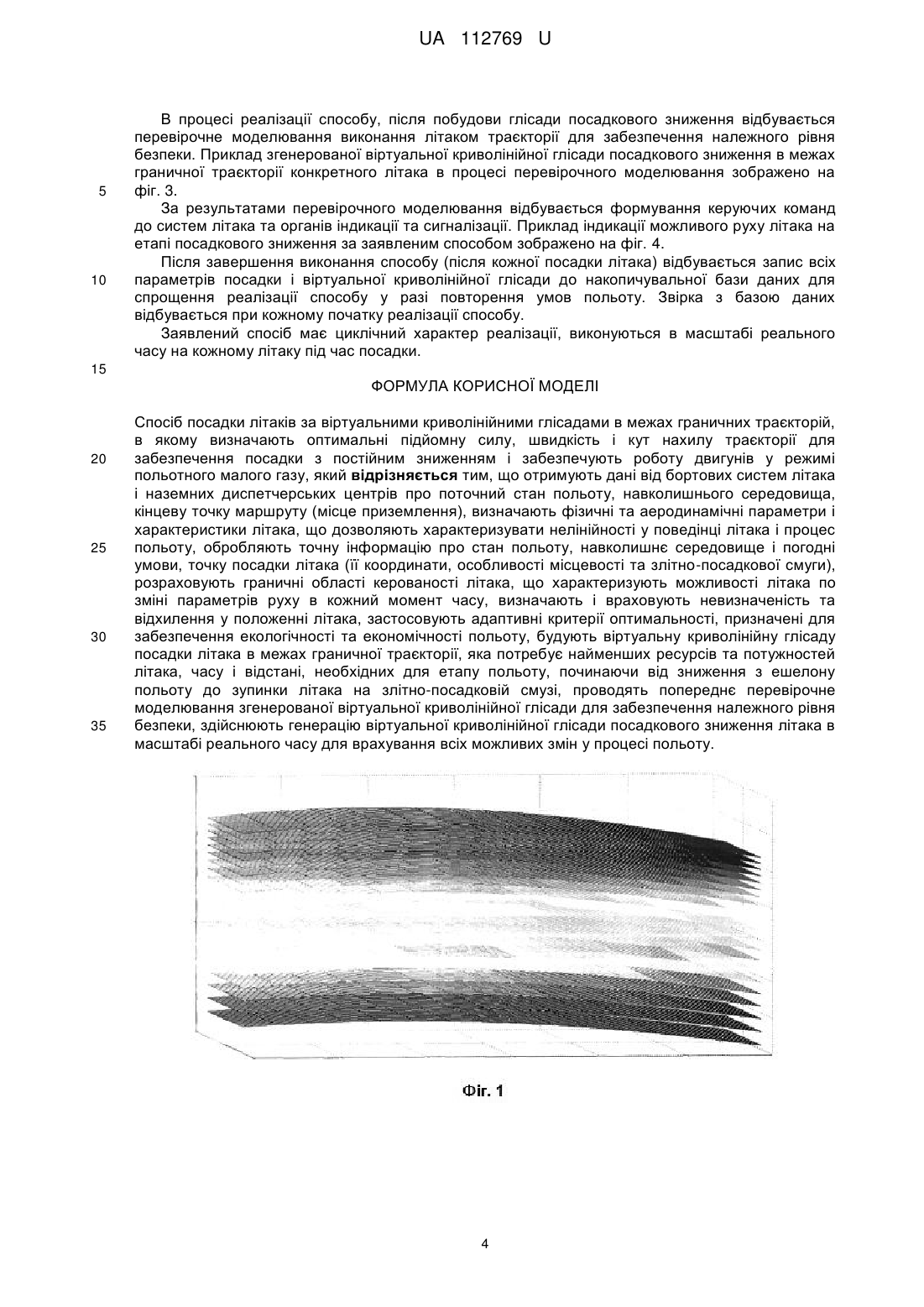
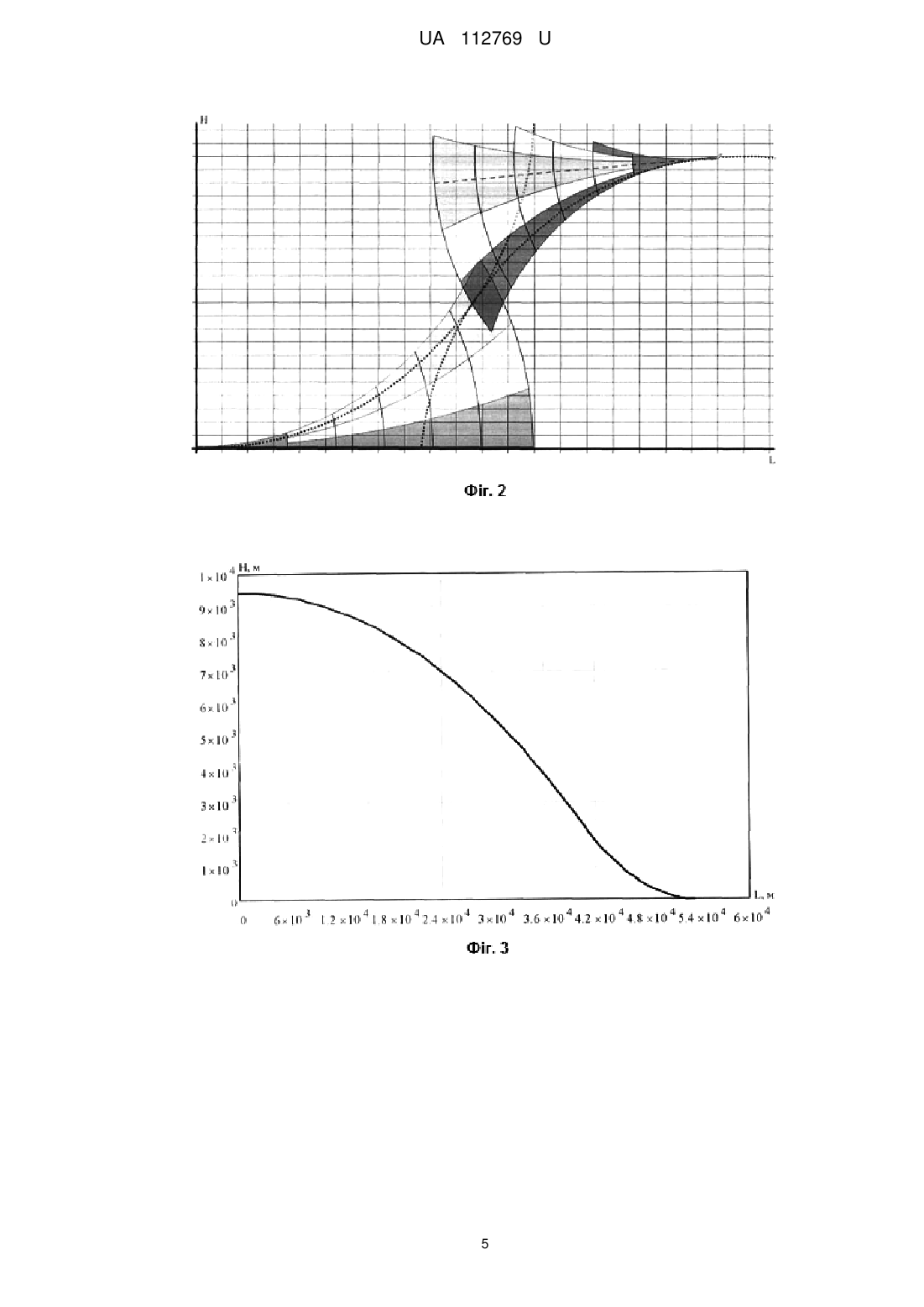
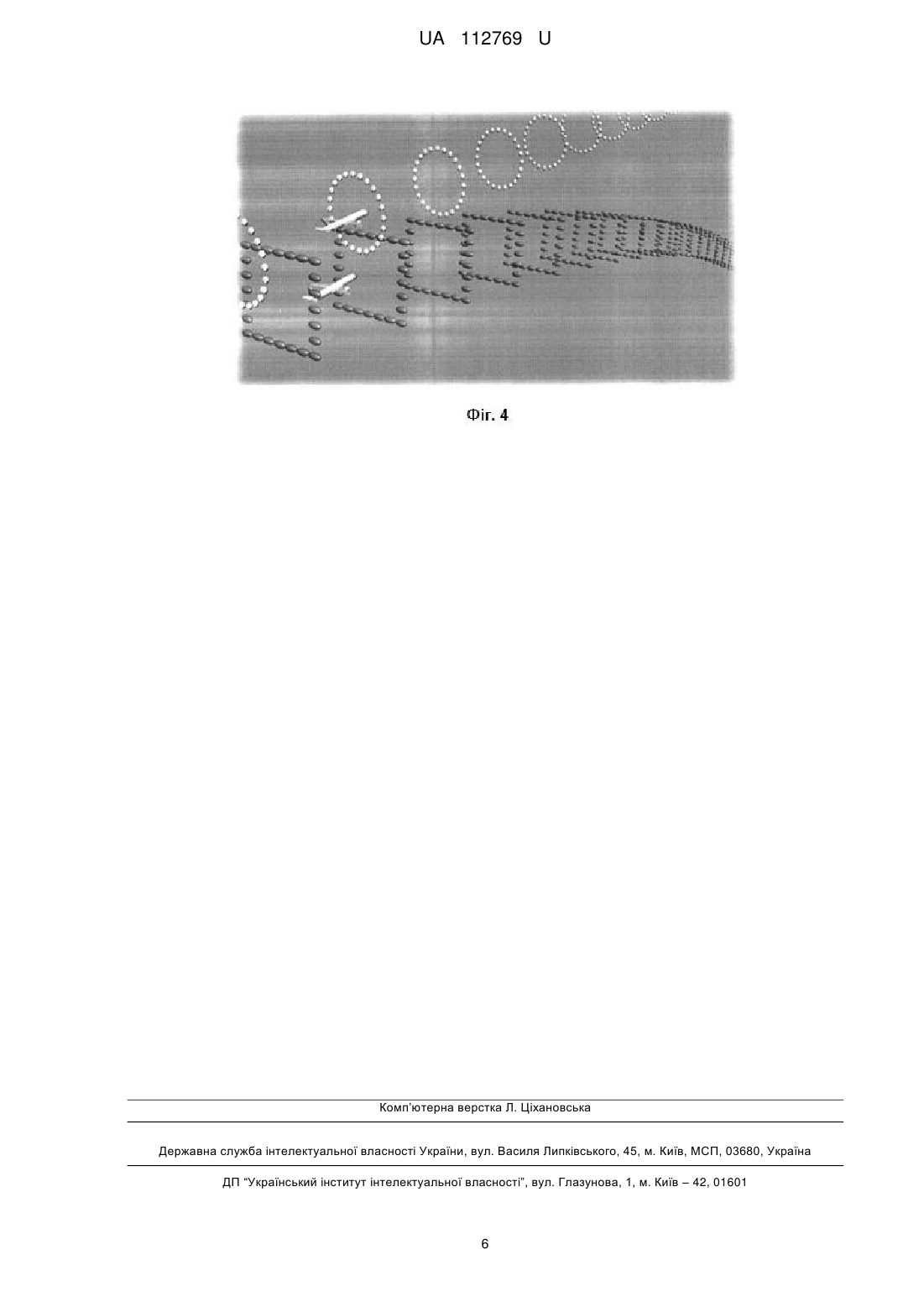
Реферат: Спосіб посадки літаків за віртуальними криволінійними глісадами в межах граничних траєкторій, в якому визначають оптимальні підйомну силу, швидкість і кут нахилу траєкторії для забезпечення посадки з постійним зниженням і забезпечують роботу двигунів у режимі польотного малого газу. Отримують дані від бортових систем літака і наземних диспетчерських центрів про поточний стан польоту, навколишнього середовища, кінцеву точку маршруту (місце приземлення). Визначають фізичні та аеродинамічні параметри і характеристики літака, що дозволяють характеризувати нелінійності у поведінці літака і процес польоту. Обробляють точну інформацію про стан польоту, навколишнє середовище і погодні умови, точку посадки літака (її координати, особливості місцевості та злітно-посадкової смуги). Розраховують граничні області керованості літака, що характеризують можливості літака по зміні параметрів руху в кожний момент часу. Визначають і враховують невизначеність та відхилення у положенні літака, застосовують адаптивні критерії оптимальності, призначені для забезпечення екологічності та економічності польоту. Будують віртуальну криволінійну глісаду посадки літака в межах граничної траєкторії, яка потребує найменших ресурсів та потужностей літака, часу і відстані, необхідних для етапу польоту, починаючи від зниження з ешелону польоту до зупинки літака на злітно-посадковій смузі. Проводять попереднє перевірочне моделювання згенерованої віртуальної криволінійної глісади для забезпечення належного рівня безпеки, здійснюють генерацію віртуальної криволінійної глісади посадкового зниження літака в масштабі реального часу для врахування всіх можливих змін у процесі польоту. UA 112769 U (12) UA 112769 U UA 112769 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі авіації, а більш конкретно належить до систем автоматичного керування та систем керування рухом повітряного транспорту та, зокрема, до способів керування положенням, висотою, курсом або орієнтацією літака на етапі посадкового зниження. Корисна модель поширюється на множину класів динамічних рухомих об'єктів, що мають як лінійні, так і нелінійні характеристики, з адаптивними системами керування, що ґрунтуються на використанні спеціалізованих математичних моделей і навігаційних пристроїв та може бути використана для підвищення безпеки, економічності та екологічності польотів в авіації, а саме на етапі посадки літака (посадкового зниження). Відомий спосіб та система керування літаком при посадці без двигунів [Патент РФ № 2321524, МПК В64Д 45/04, G08G 5/02, 2008], полягають в тому, що в основу способу покладено термінальне керування (керування кінцевим станом), при якому здійснюється періодичний прогноз кінцевого стану при заданій функції керування в залежності від вибраного критерію якості. При цьому на кожному такті поточний стан літака приймається за початковий. Критерієм якості є запас висоти в ключових пунктах. Запропонована система включає в себе інформаційно-вимірювальний комплекс, який працює за набором алгоритмів, що у нього завантажені. Запропоновані спосіб та система дозволяють підвищити якість використання можливостей екіпажу, оскільки застосування прогнозування в системах керування відповідає характеру функціональної діяльності літака, який у відповідності до кінцевого результату прогнозу будує процес керування. Недоліками представленого відомого способу і системи є те, що вони не враховують нелінійності у поведінці літака під час заходу на посадку, а також мають обмежену працездатність, коли умови польоту різко змінюються і не відповідають номінальним. Найбільш близькими технічними рішенням, вибраним за прототип, є реалізація підходів заходу на посадку з постійним зниженням для максимальної прогнозованості [Патент США № US 8655506 В2, МПК G01C 21/00, G05D 1/0217, 2008]. Дане технічне рішення належить до способів розрахункових методів посадки з постійним зниженням і до навігаційних систем літака, призначених для реалізації цих методів. Суть винаходу полягає в тому, що велике прогнозування часу прибуття може бути досягнуто завдяки посадці з постійним зниженням з підтримкою стабільного аеродинамічного кута нахилу траєкторії. У способі визначають оптимальні підйомну силу, швидкість, кут нахилу траєкторії для забезпечення посадки з постійним зниженням. Передбачено, що посадка здійснюється при роботі двигунів у режимі польотного малого газу. У способі розраховується швидкість літака, яка повинна бути під час підходу доаеропорту. Зниження швидкості літака досягається за допомогою встановлення відповідних кутів нахилу траєкторії та атаки. Навігаційна система забезпечує виконання способу проведенням всіх розрахунків для прогнозування положення літака та отриманням даних про поточний стан від інших систем літака. Прогнозування здійснюється на основі використання попередніх та поточних даних з урахуванням параметрів, що мають бути у кінцевій точці. Недоліки технічного рішення, вибраного за прототип: 1. Не враховуються нелінійності у поведінці літака під час заходу на посадку (посадкового зниження). 2. Не враховуються фізичні та функціональні властивості літака. 3. Використання тільки кута атаки та кута нахилу траєкторії для зниження швидкості викликає велике навантаження на комерційний літак. В основу заявленого способу поставлена задача генерації (розрахунку і побудови) віртуальної криволінійної глісади посадкового зниження літака по граничних траєкторіях для підвищення безпеки, екологічності та економічності посадки літаків шляхом виключення недоліків прототипу. Поставлена задача вирішується тим, що в способі посадки літаків за віртуальними криволінійними глісадами в межах граничних траєкторій, при якому перед початком посадкового зниження літака в заявленому пристрої реалізується програмний алгоритм генерації (розрахунку і побудови) віртуальної криволінійної глісади посадкового зниження і посадки літака в межах граничних траєкторій, який у свою чергу отримує дані з наземного диспетчерського центру або з наявної бортової бази даних про кінцеву точку посадки літака (її координати та характеристики злітно-посадкової смуги, місцевість, особливості аеропорту), отримує дані від бортових систем літака про поточний стан літака, режим та характеристики польоту і навколишнього середовища, отримує з бортової бази даних інформацію про фізичні та аеродинамічні параметри і характеристики даного конкретного типу літака, розраховує на базі наявного математичного апарату граничні області керованості літака (засновані на врахуванні всіх характеристик літака) з урахуванням "зон невизначеності" (можливості відхилення у визначені точних координат літака, зі здійсненням періодичного прогнозу кінцевого стану) 1 UA 112769 U 5 10 15 20 25 30 35 40 45 50 55 розраховує і будує на основі всіх отриманих даних віртуальну криволінійну глісаду посадкового зниження літака в межах граничних траєкторій (траєкторії, які потребують найменших ресурсів, та потужностей літака, часу і відстані для етапу від моменту початку зниження з ешелону польоту до зупинку літака на злітно-посадковій смузі). Крім того, програмний алгоритм включає функції розрахунку оптимальності виконання траєкторії посадкового зниження для максимального використання аеродинамічних компонентів системи керування літаком з мінімальним використанням двигунів. Процес розрахунку і побудови віртуальної криволінійної глісади посадкового зниження літака відбувається в масштабі реального часу (з постійним перерахунком, коли кожний момент часу приймається за початковий), для врахування всіх можливих змін у процесі польоту. Суть заявленого способу полягає в розрахунку та врахуванні граничних областей керованості літака з урахуванням "зон невизначеності", нелінійностей у характеристиках польоту літака, характеристик та можливих змін у стані навколишнього середовища, критеріїв оптимальності виконання посадкового зниження літака, всіх функціональних та аеродинамічних можливостей літака для побудови віртуальної криволінійної глісади, під якою розуміється деяка траєкторія для руху літака, що може мати суттєво викривлену траєкторію для руху літака на межі його можливостей, для зменшення часу і відстані, необхідних для етапу від моменту початку зниження з ешелону польоту до зупинки літака на злітно-посадковій смузі, і це дозволить виключити (усунути) недоліки прототипу та забезпечити гарантований рівень безпеки посадкового зниження літаків, розширити область умов, в яких може функціонувати заявлений спосіб, підвищити ефективність використання авіаційної техніки і можливостей екіпажу, а також суттєво зменшити шкідливий вплив на навколишнє середовище (за рахунок зменшення емісії та шумів двигунів) і забезпечити економію палива (матеріальних ресурсів). Надалі корисна модель пояснюється описом конкретного прикладу його виконання і кресленнями, де зображені: - на фіг. 1 - приклад розрахованої можливості граничної області керованості літака; - на фіг. 2 - схематичний приклад віртуальної криволінійної глісади посадкового зниження літака в межах граничних траєкторій; - на фіг. 3 приклад згенерованої віртуальної криволінійної глісади посадкового зниження літака в межах граничних траєкторій; - на фіг. 4 - приклад індикації можливого руху літака на етапі посадкового зниження за заявленим способом. Заявлений спосіб реалізується таким чином. На конкретному літаку, що знаходиться в польоті на ешелоні і наближається до аеропорту, з моменту початку заходу на посадку (посадкового зниження) визначають постійно в масштабі реального часу точні координати розташування літака і враховують можливі невизначеності і відхилення його положення, яке обумовлене похибками оцінки поточної ситуації, неадекватністю математичних моделей, впливом навколишнього середовища, навігаційними похибками та інше. Отримують з диспетчерського центру на землі точну інформацію про точку приземлення (інформацію про місцевість, координати, злітно-посадкову смугу, навколишнє середовище). Отримують від систем літака точну інформацію про стан польоту, його характеристики і параметри, погодні умови, фізичні та аеродинамічні характеристики конкретного літака. Проводять оцінку та аналіз всіх отриманих даних. Розраховують граничні області керованості літака, що характеризують можливості літака по зміні параметрів руху в один момент часу і дозволяють характеризувати нелінійність поведінки літака і процесу польоту взагалі. Приклад такої області зображено на фіг. 1. Після чого визначають параметри посадкового зниження літака, а саме: координати точки початку зниження; швидкість літака, кут атаки та нахилу траєкторії, починаючи з точки початку зниження і до кінцевої точки з відповідними змінами по всій траєкторії зниження; координати кінцевої точки зниження; час, необхідний для зниження літака; параметри роботи двигунів з урахування максимального зменшення їх тяги; параметри задіяння всіх аеродинамічних компонентів систем керування літаком (руль висоти, елерони, закрилки, інтерцептори і т.д.). Зменшення тяги двигунів дозволить зменшити шкідливий вплив на екологію (зменшити емісію, шуму, вібрації та шкідливі викиди в атмосферу в районі аеропорту), а також підвищити економічність польотів шляхом економії палива та зменшення зносу двигунів. Задіяння всіх аеродинамічних компонентів системи керування літаком дозволить підвищити якість управління на етапі зниження, регулювати швидкість літака, забезпечити належний рівень безпеки польоту. Далі, на основі визначених параметрів генерують (розраховують і будують) віртуальну криволінійну глісаду посадкового зниження літака. 2 UA 112769 U 5 Віртуальна криволінійна глісада посадкового зменшення літака направлена на зниження відстані і часу, необхідних для зниження літака, забезпечення максимальної точності виконання зниження шляхом оновлення віртуальної криволінійної глісади в кожний момент часу із заданою дискретизацією (генерація глісади відбувається в масштабі реального часу), забезпечення індивідуальності для кожного літака, умов польоту та інших параметрів. Генерація віртуальної криволінійної глісади посадкового зниження відбувається за наступним математичним апаратом: r1 10 V12 V22 , 2 g (cos(1) n y1) 2 g (cos(2 ) n y1) r1 - радіус першої половини криволінійної траєкторії посадкового зниження; V1 - швидкість літака на початку слідування вздовж траєкторії; V2 - швидкість літака наприкінці слідування вздовж траєкторії; g - прискорення вільного падіння; 1 - кут нахилу траєкторії на початку траєкторії; 2 - кут нахилу траєкторії в кінці траєкторії; 15 n y1 - перевантаження на всьому шляху траєкторії. 20 h1 r1 (cos(1) cos(2 )) , h1 - перепад висоти при виконанні зниження на першій половині траєкторії; r1 - радіус першої половини криволінійної траєкторії посадкового зниження; 1 - кут нахилу траєкторії на початку траєкторії; 2 - кут нахилу траєкторії в кінці траєкторії. r2 25 V3 2 V2 2 , 2 g (n y 2 cos(2 )) 2 g (n y 2 cos(3 )) r2 - радіус другої половини криволінійної траєкторії посадкового зниження; V2 - швидкість літака на початку слідування вздовж траєкторії; V3 - швидкість літака наприкінці слідування вздовж траєкторії; g - прискорення вільного падіння; 2 - кут нахилу траєкторії на початку траєкторії; 3 - кут нахилу траєкторії в кінці траєкторії; n y1 - перевантаження на всьому шляху траєкторії. 30 35 40 45 h2 r2 (cos(2 ) cos(3 )) , h2 - перепад висоти при виконанні зниження на другій половині траєкторії; r2 - радіус другої половини криволінійної траєкторії посадкового зниження; 2 - кут нахилу траєкторії на початку траєкторії; 3 - кут нахилу траєкторії в кінці траєкторії. H (h1 h2 ) , H - загальній перепад висоти всієї траєкторії; h1 - перепад висоти при виконанні зниження на першій половині траєкторії; h2 - перепад висоти при виконанні зниження на другій половині траєкторії. Забезпечення посадкового зниження літака за віртуальною криволінійною глісадою додатково дозволить зменшити завантаженість на пілотів літака, органи управління повітряним рухом, розвантажити аеропорти та наблизити авіацію до переходу від зональної навігації до вільних польотів. Крім того, при генерації віртуальної криволінійної глісади посадкового зниження літака застосовують математичні ймовірності та адаптивні критерії оптимальності, які направлені на: забезпечення побудови граничної траєкторії посадкового зниження, що необхідно для максимального зменшення часу і відстані, необхідних для посадки; забезпечення найменшої тяги двигунів на етапі посадкового зниження. Схематичний приклад віртуальної криволінійної глісади посадкового зниження в межах граничної траєкторії зображено на фіг. 2. 3 UA 112769 U 5 10 В процесі реалізації способу, після побудови глісади посадкового зниження відбувається перевірочне моделювання виконання літаком траєкторії для забезпечення належного рівня безпеки. Приклад згенерованої віртуальної криволінійної глісади посадкового зниження в межах граничної траєкторії конкретного літака в процесі перевірочного моделювання зображено на фіг. 3. За результатами перевірочного моделювання відбувається формування керуючих команд до систем літака та органів індикації та сигналізації. Приклад індикації можливого руху літака на етапі посадкового зниження за заявленим способом зображено на фіг. 4. Після завершення виконання способу (після кожної посадки літака) відбувається запис всіх параметрів посадки і віртуальної криволінійної глісади до накопичувальної бази даних для спрощення реалізації способу у разі повторення умов польоту. Звірка з базою даних відбувається при кожному початку реалізації способу. Заявлений спосіб має циклічний характер реалізації, виконуються в масштабі реального часу на кожному літаку під час посадки. 15 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 35 Спосіб посадки літаків за віртуальними криволінійними глісадами в межах граничних траєкторій, в якому визначають оптимальні підйомну силу, швидкість і кут нахилу траєкторії для забезпечення посадки з постійним зниженням і забезпечують роботу двигунів у режимі польотного малого газу, який відрізняється тим, що отримують дані від бортових систем літака і наземних диспетчерських центрів про поточний стан польоту, навколишнього середовища, кінцеву точку маршруту (місце приземлення), визначають фізичні та аеродинамічні параметри і характеристики літака, що дозволяють характеризувати нелінійності у поведінці літака і процес польоту, обробляють точну інформацію про стан польоту, навколишнє середовище і погодні умови, точку посадки літака (її координати, особливості місцевості та злітно-посадкової смуги), розраховують граничні області керованості літака, що характеризують можливості літака по зміні параметрів руху в кожний момент часу, визначають і враховують невизначеність та відхилення у положенні літака, застосовують адаптивні критерії оптимальності, призначені для забезпечення екологічності та економічності польоту, будують віртуальну криволінійну глісаду посадки літака в межах граничної траєкторії, яка потребує найменших ресурсів та потужностей літака, часу і відстані, необхідних для етапу польоту, починаючи від зниження з ешелону польоту до зупинки літака на злітно-посадковій смузі, проводять попереднє перевірочне моделювання згенерованої віртуальної криволінійної глісади для забезпечення належного рівня безпеки, здійснюють генерацію віртуальної криволінійної глісади посадкового зниження літака в масштабі реального часу для врахування всіх можливих змін у процесі польоту. 4 UA 112769 U 5 UA 112769 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюVolosheniuk Dmytro Oleksnadrovych, Pavlov Vadym Volodymypovych, Pavlova Svitlana Vadymivna
Автори російськоюВолошенюк Дмитрий Александрович, Павлов Вадим Владимирович, Павлова Светлана Вадимовна
МПК / Мітки
МПК: G01C 21/00, G05B 15/00, G05B 17/00, G05D 1/00, G06N 7/00, G08G 5/00, G05B 13/04
Мітки: траєкторій, літаків, криволінійними, посадки, граничних, спосіб, глісадами, межах, віртуальними
Код посилання
<a href="https://ua.patents.su/8-112769-sposib-posadki-litakiv-za-virtualnimi-krivolinijjnimi-glisadami-v-mezhakh-granichnikh-traehktorijj.html" target="_blank" rel="follow" title="База патентів України">Спосіб посадки літаків за віртуальними криволінійними глісадами в межах граничних траєкторій</a>
Пристрій посадки літаків за віртуальними криволінійними глісадами в межах граничних траєкторій
Номер патенту: 112768
Опубліковано: 26.12.2016
Автори: Павлова Світлана Вадимівна, Волошенюк Дмитро Олександрович, Павлов Вадим Володимирович
МПК: G05B 13/04, G01C 21/00, G05B 17/00, G05D 1/00, G08G 5/00, G05B 15/00
Мітки: пристрій, межах, траєкторій, віртуальними, граничних, глісадами, криволінійними, літаків, посадки
Формула / Реферат:
Пристрій посадки літаків за віртуальними криволінійними глісадами в межах граничних траєкторій, який містить модуль аналізу даних, вихід якого підключений через модуль розрахунку параметрів посадкового зниження до програмного модуля перевірочного моделювання, який підключений до модуля формування керуючих команд, який відрізняється тим, що в модуль аналізу даних введені блок прийому даних, блок обробки даних, блок оцінки поточних польотних...
Пристрій для рятування літаків
Номер патенту: 58658
Опубліковано: 26.04.2011
Автор: Можний Юрій Дмитрович
МПК: B64D 45/00
Мітки: рятування, літаків, пристрій
Формула / Реферат:
Пристрій для рятування літаків, що містить складене основне крило з додатковими крилами, привід розкладення крил, який відрізняється тим, що складене крило має додатково верхню обтічну обшивку, нижню обтічну обшивку, карман в основному крилі, гальмувальний парашут, механізм зміни центра ваги, ручну та автоматизовану систему керування процесом рятування (літака).
Пристрій для рятування літаків
Номер патенту: 58537
Опубліковано: 11.04.2011
Автор: Можний Юрій Дмитрович
МПК: B64D 45/00
Мітки: рятування, пристрій, літаків
Формула / Реферат:
Пристрій для рятування літаків, що містить гальмувальний парашут, багатокупольну систему вантажних парашутів, з'єднаних тросом з літаком, центруючий пристрій для зберігання фюзеляжу літака в горизонтальному положенні, пристрій, створюючий гальмувальне зусилля, який виконаний у вигляді шківа з регульованим реверсивним приводом, додатковий механізм зміни кута нахилу осі фюзеляжу літака до горизонталі, а при аварійному спусканні - в інтервалі...
Спосіб посадки літального апарата
Номер патенту: 44843
Опубліковано: 12.10.2009
Автори: Слєпов Лев Іванович, Бондік Олександр Сергійович, Герасименко Володимир Вікторович
МПК: B64D 45/00
Мітки: літального, посадки, апарата, спосіб
Формула / Реферат:
Спосіб посадки літального апарата, при якому здійснюють посадку на ґрунт або на бетонну злітно-посадочну смугу, який відрізняється тим, що здійснюють фіксацію фюзеляжу літального апарата вздовж повздовжньої осі напрямку посадки за допомогою рухомого пристрою посадки літального апарата.
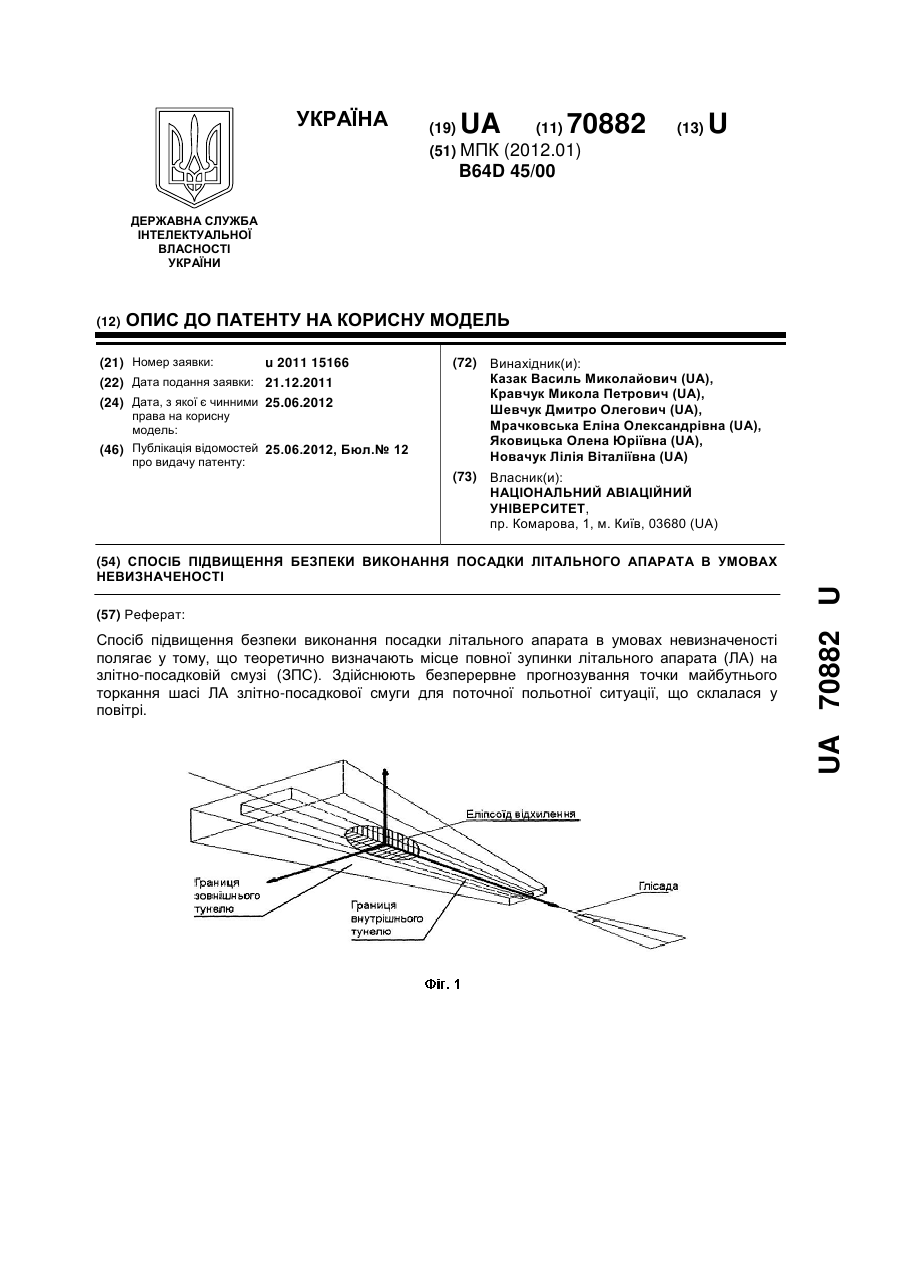
Спосіб підвищення безпеки виконання посадки літального апарата в умовах невизначеності
Номер патенту: 70882
Опубліковано: 25.06.2012
Автори: Шевчук Дмитро Олегович, Мрачковська Еліна Олександрівна, Казак Василь Миколайович, Яковицька Олена Юріївна, Кравчук Микола Петрович, Новачук Лілія Віталіївна
МПК: B64D 45/00
Мітки: невизначеності, умовах, спосіб, посадки, безпеки, підвищення, виконання, апарата, літального
Формула / Реферат:
1. Спосіб підвищення безпеки виконання посадки літального апарата в умовах невизначеності, який полягає у тому, що теоретично визначають місце повної зупинки літального апарата (ЛА) на злітно-посадковій смузі (ЗПС), який відрізняється тим, що здійснюють безперервне прогнозування точки майбутнього торкання шасі ЛА злітно-посадкової смуги для поточної польотної ситуації, що склалася у повітрі.2. Спосіб за п. 1, який відрізняється тим,...
Попередній патент: Пристрій посадки літаків за віртуальними криволінійними глісадами в межах граничних траєкторій
Наступний патент: Спосіб лікування хворих на хронічні запальні захворювання кишечнику з нутритивною недостатністю
Випадковий патент: Шахтна пересувна трансформаторна підстанція