Штангенциркуль адаптивний

Формула / Реферат
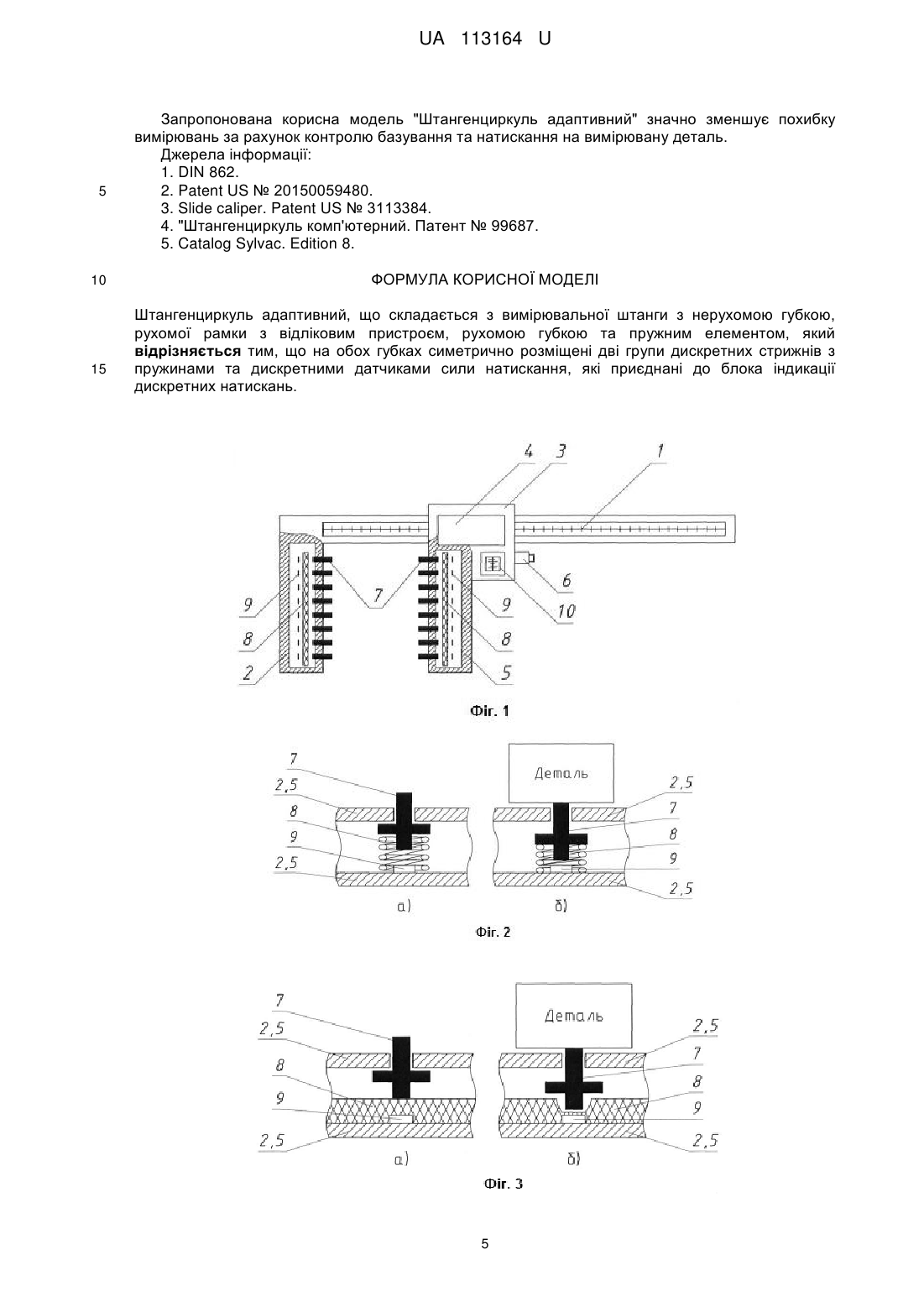
Штангенциркуль адаптивний, що складається з вимірювальної штанги з нерухомою губкою, рухомої рамки з відліковим пристроєм, рухомою губкою та пружним елементом, який відрізняється тим, що на обох губках симетрично розміщені дві групи дискретних стрижнів з пружинами та дискретними датчиками сили натискання, які приєднані до блока індикації дискретних натискань.
Текст
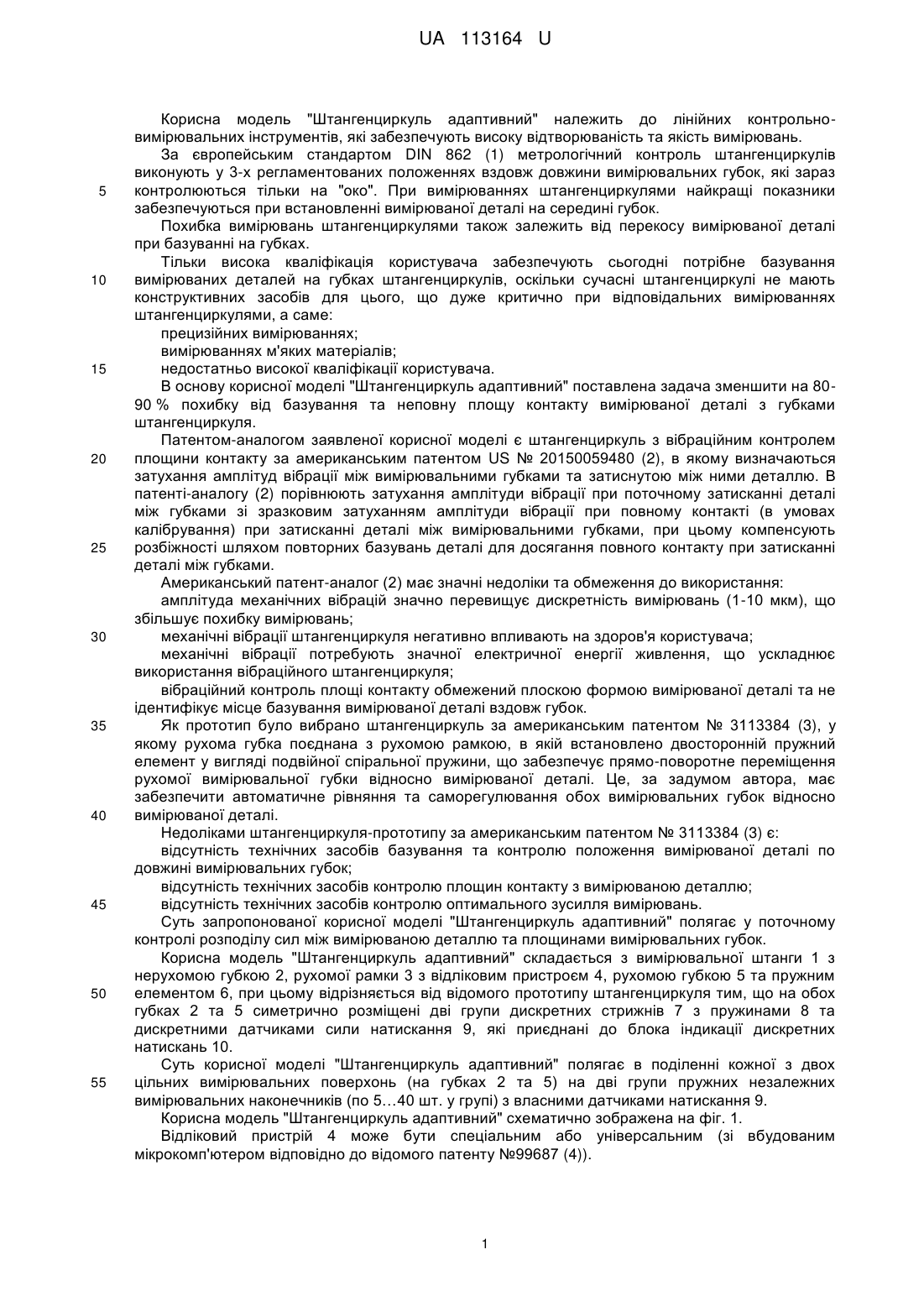
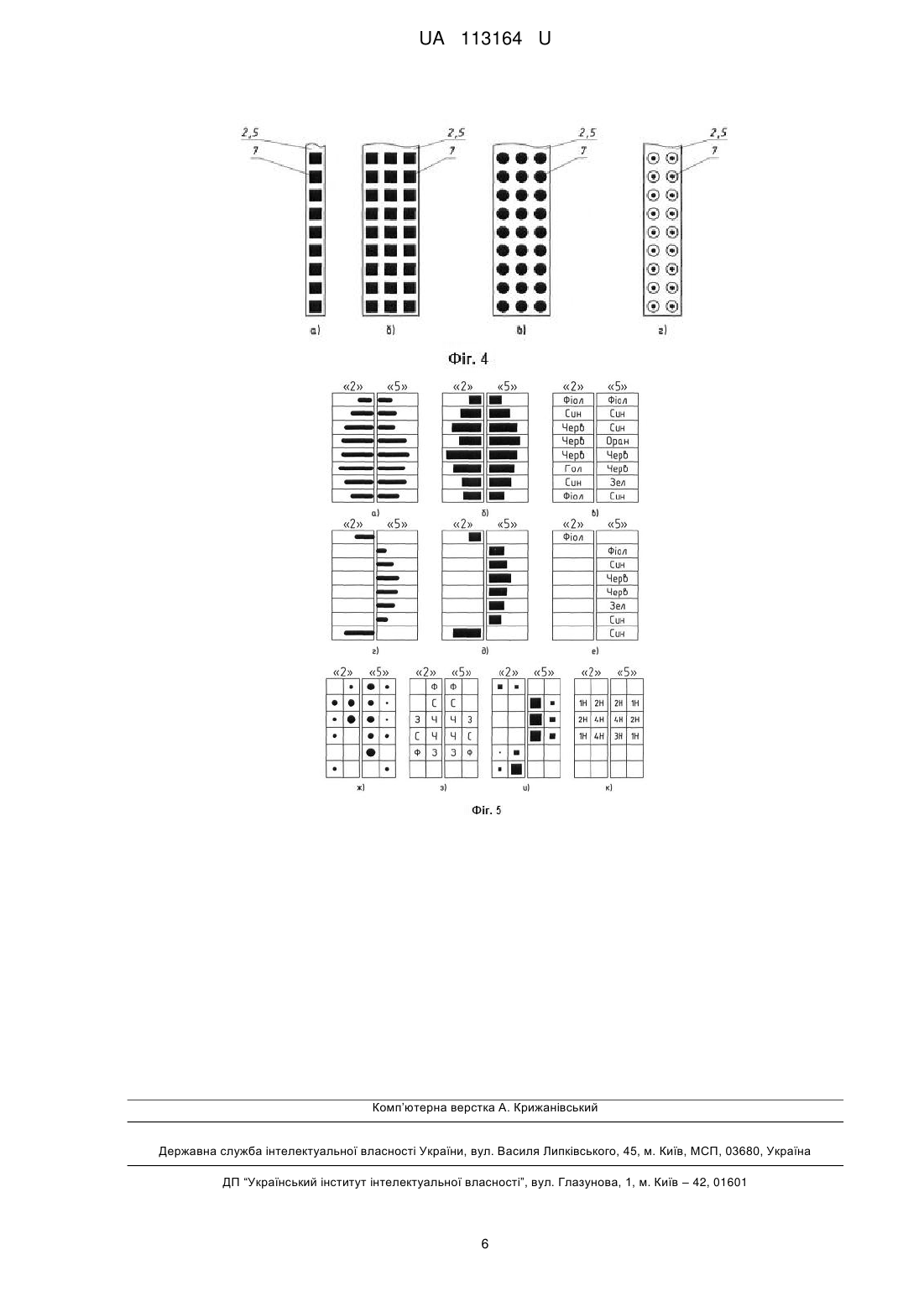
Реферат: UA 113164 U UA 113164 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель "Штангенциркуль адаптивний" належить до лінійних контрольновимірювальних інструментів, які забезпечують високу відтворюваність та якість вимірювань. За європейським стандартом DIN 862 (1) метрологічний контроль штангенциркулів виконують у 3-х регламентованих положеннях вздовж довжини вимірювальних губок, які зараз контролюються тільки на "око". При вимірюваннях штангенциркулями найкращі показники забезпечуються при встановленні вимірюваної деталі на середині губок. Похибка вимірювань штангенциркулями також залежить від перекосу вимірюваної деталі при базуванні на губках. Тільки висока кваліфікація користувача забезпечують сьогодні потрібне базування вимірюваних деталей на губках штангенциркулів, оскільки сучасні штангенциркулі не мають конструктивних засобів для цього, що дуже критично при відповідальних вимірюваннях штангенциркулями, а саме: прецизійних вимірюваннях; вимірюваннях м'яких матеріалів; недостатньо високої кваліфікації користувача. В основу корисної моделі "Штангенциркуль адаптивний" поставлена задача зменшити на 8090 % похибку від базування та неповну площу контакту вимірюваної деталі з губками штангенциркуля. Патентом-аналогом заявленої корисної моделі є штангенциркуль з вібраційним контролем площини контакту за американським патентом US № 20150059480 (2), в якому визначаються затухання амплітуд вібрації між вимірювальними губками та затиснутою між ними деталлю. В патенті-аналогу (2) порівнюють затухання амплітуди вібрації при поточному затисканні деталі між губками зі зразковим затуханням амплітуди вібрації при повному контакті (в умовах калібрування) при затисканні деталі між вимірювальними губками, при цьому компенсують розбіжності шляхом повторних базувань деталі для досягання повного контакту при затисканні деталі між губками. Американський патент-аналог (2) має значні недоліки та обмеження до використання: амплітуда механічних вібрацій значно перевищує дискретність вимірювань (1-10 мкм), що збільшує похибку вимірювань; механічні вібрації штангенциркуля негативно впливають на здоров'я користувача; механічні вібрації потребують значної електричної енергії живлення, що ускладнює використання вібраційного штангенциркуля; вібраційний контроль площі контакту обмежений плоскою формою вимірюваної деталі та не ідентифікує місце базування вимірюваної деталі вздовж губок. Як прототип було вибрано штангенциркуль за американським патентом № 3113384 (3), у якому рухома губка поєднана з рухомою рамкою, в якій встановлено двосторонній пружний елемент у вигляді подвійної спіральної пружини, що забезпечує прямо-поворотне переміщення рухомої вимірювальної губки відносно вимірюваної деталі. Це, за задумом автора, має забезпечити автоматичне рівняння та саморегулювання обох вимірювальних губок відносно вимірюваної деталі. Недоліками штангенциркуля-прототипу за американським патентом № 3113384 (3) є: відсутність технічних засобів базування та контролю положення вимірюваної деталі по довжині вимірювальних губок; відсутність технічних засобів контролю площин контакту з вимірюваною деталлю; відсутність технічних засобів контролю оптимального зусилля вимірювань. Суть запропонованої корисної моделі "Штангенциркуль адаптивний" полягає у поточному контролі розподілу сил між вимірюваною деталлю та площинами вимірювальних губок. Корисна модель "Штангенциркуль адаптивний" складається з вимірювальної штанги 1 з нерухомою губкою 2, рухомої рамки 3 з відліковим пристроєм 4, рухомою губкою 5 та пружним елементом 6, при цьому відрізняється від відомого прототипу штангенциркуля тим, що на обох губках 2 та 5 симетрично розміщені дві групи дискретних стрижнів 7 з пружинами 8 та дискретними датчиками сили натискання 9, які приєднані до блока індикації дискретних натискань 10. Суть корисної моделі "Штангенциркуль адаптивний" полягає в поділенні кожної з двох цільних вимірювальних поверхонь (на губках 2 та 5) на дві групи пружних незалежних вимірювальних наконечників (по 5…40 шт. у групі) з власними датчиками натискання 9. Корисна модель "Штангенциркуль адаптивний" схематично зображена на фіг. 1. Відліковий пристрій 4 може бути спеціальним або універсальним (зі вбудованим мікрокомп'ютером відповідно до відомого патенту №99687 (4)). 1 UA 113164 U 5 10 15 20 25 30 35 40 45 50 55 60 Дискретні стрижні 7 розміщені на кожній з двох губок 2 та 5, з власним дискретним датчиком натискань 9, незалежно один від одного. Зусилля натискання кожної з двох губок 2 та 5 на вимірювану деталь подроблені на локальні зусилля між окремими дискретними стрижнями 7 (в залежності від розміщення та площі контакту кожного дискретного стрижня 7 з деталлю). Сумарна сила пружності усіх пружин 8 до дискретних елементів 7 на губках 2 та 5 становить 5…15 % від сили пружності єдиного пружного елемента 6. Дискретні стрижні 7 конструктивно розміщені та пружно переміщуються у корпусах кожної з губок 2 та 5 при натисканні на вимірювану деталь. Робочі частини (наконечники) стрижнів 7 у початковому положенні виступають над корпусами обох вимірювальних губок 2 та 5 (фіг. 2а, фіг. 3а) на 2…10 мм завдяки пружинам 8, що забезпечують повний хід дискретних стрижнів у 2…10 мм. При натисканні дискретних стрижнів 7 (розміщених на губках 2 та 5) на вимірювану деталь вони починають поглиблюватися у корпуси губок 2 та 5, компенсуючи значно менші сили пружності пружин 8, збільшуючи натискання на дискретні датчики натискання 9 (фіг. 2б, 3б). Оптимальну силу натискань дискретних стрижнів 7 забезпечує робочий хід дискретних стрижнів 7 у межах 90 % від їх повного ходу, при цьому пружини 8 запобігають пошкодженню дискретних датчиків натискання 9 при повному переміщенні дискретних стрижнів 7. Робочі частини (наконечники) дискретних стрижнів 7 мають форму звичайних метрологічних наконечників та відрізняються за розмірами та розташуванням на губках 2 та 5 (фіг. 4), а саме: прямокутні паралелепіпеди з однорядним (фіг. 4а) або багаторядним розміщенням стрижнів 7 (фіг. 4б); циліндри або циліндри-сфери з однорядним або багаторядним розміщенням дискретних стрижнів 7 (фіг. 4в); конус-сфера з однорядним або багаторядним розміщенням дискретних стрижнів 7 (фіг. 4г); з іншими формами метрологічних наконечників дискретних стрижнів 7. Натискна частина дискретних стрижнів 7 (з протилежної сторони від наконечників) контактує через відповідні пружини 8 з власними дискретними датчиками натискання 9. Пружини 8 забезпечують постійний зазор між кожним окремим дискретним стрижнем 7 та відповідним дискретним датчиком натискання 9 у початковому положенні дискретного стрижня 7 (за відсутності натискання вимірюваної деталі) та захищають дискретні датчики натискання 9 від пошкоджень. Пружини 8 можуть бути виконані у кількох варіантах: металеві спіральні або неметалеві еластині трубчасті, з розміщенням навкруги натискних частин дискретних стрижнів 7 (фіг. 2а, 2б) та датчиків натискання 9; пласкі пружні металеві або неметалеві еластичні, які розміщені між торцями натискних частин стрижнів 7 та відповідними дискретними датчиками натискання 9 (фіг. 3а, фіг. 3б). Дискретний датчик натискання 9 відповідає наступним умовам: рекомендовані зусилля натискання одиничного дискретного стрижня 7 становлять 0,04…4 Н для загальних прецизійних вимірювань; рекомендовані зусилля натискання одиничного дискретного стрижня 7 становлять 0…0,25 Н для вимірювань м'яких матеріалів, також можливі інші діапазони вимірювань зусиль дискретними датчиками натискання 9 для спеціальних потреб; інформацію від дискретного датчика натискання 9 до відлікового блока дискретних натискань 10 передають дротовим або бездротовим способом. Як дискретні датчики натискань 9 доцільно використовувати відомі датчики сили від фірм Peratech (Велікобританія) та Tecsam (США), які виготовлені за технологією QTC або аналогічні за призначенням. Використання дискретних стрижнів 7 з пласкими наконечниками разом з чутливими дискретними датчиками натискань 9 (діапазоном 0…0,25 Н) дозволяє підвищити прецизійність вимірювань деталей з м'яких матеріалів, для яких оптимальні зусилля вимірювань штангенциркулем мають бути менше у 5…15 разів відносно загальних прецизійних вимірювань. При однорядному (фіг. 4а) розміщенні дискретних стрижнів 7 з відповідними дискретними датчиками натискань 9 при довжині губок 40-100 мм для загальних прецизійних вимірювань доцільно використовувати дискретні або однорядні QTC датчики сили, кожний з діапазоном 0…4,4 Н, при цьому загальна кількість дискретних стрижнів 7 з відповідними датчиками натискання 9 має становити 5…9 шт. При однорядному (фіг. 4а) та багаторядному (фіг. 4б) розміщенні дискретних стрижнів 7 з відповідними датчиками натискання 9 при довжині губок 100…1000 мм для загальних прецизійних вимірювань краще використовувати однорядні або матричні QTC датчики сили, 2 UA 113164 U 5 10 15 20 25 30 35 40 45 50 55 60 кожний з діапазоном О…4,4 Н, при цьому загальна кількість дискретних стрижнів з відповідними датчиками натискання 9 становить 10…100 шт. Датчики натискань 9 дротовим або бездротовим способом передають відліковому блоку дискретних натискань 10 електричні сигнали, які той трансформує у графічно-цифрові показники, а саме: у вигляді лінійних (довжина лінії) або площинних (площа прямокутників, квадратів або кругів) діаграм з цифровим дублюванням, відповідно до сил натискання дискретних стрижнів 7 або різниць сил натискання співвісних стрижнів 7 на губках 2 та 5; у вигляді різнокольорових зон (червоний, оранжевий, жовтий, зелений, голубий, синій, фіолетовий або інші), з цифровим дублюванням, відповідно до сил натискання дискретних стрижнів 7 або різниць сил натискання співвісних стрижнів 7 на губках 2 та 5; геометричний розподіл дискретних стрижнів 7 на губках 2 та 5, з цифровим дублюванням порядкового лінійного або матричного номера. При однорядному розміщенні дискретних стрижнів 7 відліковий блок дискретних натискань 10 відображає наступне: графічний розподіл сил натискання на кожний дискретний стрижень 7 або різниці сил натискання між співвісними дискретними стрижнями 7 на губках 2 та 5 у вигляді двостовпової матриці лінійних (фіг. 5а, 5д) та площинних діаграм (фіг. 5б, 5е), кольорових зон (фіг. 5г, 5ж), з можливістю цифрового дублювання зазначених показників у двостоповій матриці; геометричне розміщення стрижнів 7 на губках 2 та 5, з можливістю цифрового дублювання порядкового лінійного номера кожного дискретного стрижня 7. При багаторядному розміщенні дискретних стрижнів 7 відліковий блок дискретних натискань 10 відображає наступне: графічний розподіл сил натискання на кожний дискретний стрижень 7 або різниці сил натискання співвісних стрижнів 7 на губках 2 та 5 у вигляді багатостовпової матриці лінійних або площинних діаграм (фіг. 5д, 5к), кольорових зон (фіг. 5з) з можливістю цифрового дублювання показників (фіг. 5к); геометричне розміщення дискретних стрижнів 7 на губках 2, 5 з можливістю цифрового дублювання порядкових матричних номерів (фіг. 5к). Блок індикації дискретних натискань 10, окрім графічних, може надавати цифрову інформацію стосовно суми сил натискання для усіх дискретних стрижнів 7 на кожній окремій губці 2 та 5 для порівняння цих сум між собою та з декларованою силою натискання пружного елемента 6. Блок індикації дискретних натискань 9 може бути розміщений наступним чином: стаціонарно, на рухомій рамці 3, окремо або разом з відліковим пристроєм 4; стаціонарно, на штанзі 1 або на одній з двох губок 2 або 5; автономно, з механічним або магнітним кріпленням на одній з частин штангенциркуля (на штанзі 1, на рухомій рамці 3, на одній з двох губок 2 або 5). Дисплей блока індикації дискретних натискань 10 має достатні розміри та функціональні можливості: для якісного графічного та цифрового відображення лінійних або площинних діаграм; для передачі кольорів та їх цифрового дублювання при розподілі показників натискання для кожного з дискретних стрижнів 7; ідентифікацію координат та масштабування положення дискретних стрижнів 7 для кожної з губок (2, 5); масштабування з цифровим дублюванням фрагментів матриць лінійних або площинних діаграм, кольорових зон. Аналіз графічних зображень з цифровим дублюванням при використанні блока індикації дискретних натискань 10 (діаграм та кольорових зон) дозволяють отримати усі необхідні геометричні та силові показники умов контакту губок (2, 5) з вимірюваною деталлю: натискання кожної з губок 2 та 5 на деталь дорівнюють сумі натискань усіх дискретних стрижнів 7, розміщених на відповідних губках 2 та 5, при цьому відмінність сум сил натискань від регламентованого зусилля свідчить про нештатну роботу пружного елемента 6; сумарні натискання на деталь дискретних стрижнів 7 на кожній з губок 2 та 5 мають бути рівними, при цьому різниця між ними свідчить про непаралельність губок 2 та 5; графічні відображення розподілів сил натискання між дискретними стрижнями 7 на кожній з губок 2 та 5 мають бути симетричним за конфігурацією та значеннями сил натискання, при цьому графічна асиметрія конфігурацій діаграм та кольорових зон натискання на деталь окремих дискретних стрижнів 7 на губках 2 та 5 свідчить про порушення перпендикулярності натискання губок 2 та 5 на вимірювану деталь. 3 UA 113164 U 5 10 15 20 25 30 35 40 При калібруванні та вимірюваннях стало можливим контролювати регламентовані зони, у яких за стандартом DIN 862 (1) необхідно затискати вимірювану деталь. Вимірювання деталей за допомогою корисної моделі "Штангенциркуль адаптивний" виконують з наступними переходами: 1) включають відліковий пристрій 4 та блок індикації дискретних натискань 10; 2) вибирають відповідний варіант графіки на блоцііндикації дискретних натискань 10 (лінійні або площинні діаграми, кольорові зони з цифровим дублюванням усіх показників); 3) шляхом натискання рукою на пружний елемент 6 переміщують рухому рамку 3 разом з губкою 5 по вимірювальній штанзі 1 з губкою 2 до забезпечення торкання між усіма дискретними елементами 7 на губках 2 та 5 з силою натискання до 5 % від номінального зусилля; 3) після загального торкання усіх співвісних дискретних стрижнів 7 (у складі губок 2, 5) встановлюють "0" на відліковому пристрої 4 та встановлюють "0" на блоці індикації дискретних натискань 10; 4) розводять губки (2, 5) з дискретними стрижнями 7 для охоплення деталі та притискають дискретні стрижні 7 строго перпендикулярно до деталі шляхом натискання лівою рукою на губку 2, правою рукою - на пружний елемент 6, який через губку 5 забезпечує оптимальне зусилля натискання; 5) на блоці індикації дискретних натискань 10 порівнюють для обох губок (2, 5) графічні розподілення сил натискання на деталь співвісних дискретних стрижнів 7: - симетрія графічних розподілень співвісних дискретних стрижнів 7 та рівномірний розподіл сил натискання дискретних стрижнів 7 у межах кожної з двох губок 2 та 5 свідчать про нормальне притискання до деталі дискретних стрижнів 7 та підтверджують паралельність губок 2 та 5, що необхідно для виконання наступного переходу 6; - асиметрія графічних розподілень співвісних дискретних стрижнів 7 та нерівномірний розподіл сил натискання дискретних стрижнів 7 у межах кожної окремої губки 2 та 5 свідчать про некоректне їх натискання на вимірювану деталь та непаралельність губок 2 та 5, що потребує повторення попереднього переходу 4 з урахуванням визначених невідповідностей; 6) для великої кількості (понад 10 шт.) дискретних стрижнів 7 та дискретних датчиків натискання 9 для графічного відображення базування та натискання доцільно вибрати: - лінійні або площинні діаграми різниць сил натискання між співвісними дискретними стрижнями 7 на губках 2 та 5 з цифровим дублюванням показників; - кольорове зонування різниць сил натискання між співвісними дискретними стрижнями 7 на губках 2 та 5 з цифровим дублюванням показників; 7) для оцінки достовірності сили натискання пружного елемента 6 доцільно порівняти суми сил натискання на усі дискретні стрижні 7 для кожної з губок 2 та 5 з загальною силою натискання пружного елемента 6, а за необхідності корегувати силу від пружного елемента 6; 8) у разі повторних вимірювань виконують переходи 4…7. Робота з корисною моделлю "Штангенциркуль адаптивний" не потребує особливих знань та навичок, оскільки запропонована конструкція виключає суб'єктивний фактор при базуванні деталі при відповідальних вимірюваннях (прецизійних деталей, м'яких матеріалів). Було виконано техніко-метрологічний аналіз та порівняння запропонованої корисної моделі "Штангенциркуль адаптивний" з кращим сучасним серійним штангенциркулем Sylvac (Швейцарія) /5/ з пружним елементом (див. таблицю). Таблиця Значення показників та функцій Показники штангенциркулів цифрових Корисна модель "Штангенциркуль Штангенциркуль UL4 0…2000 мм з пружними елементами адаптивний» фірми Sylvac (5) Діапазон/дискретність, мм 0…2000/0,01 0…2000/0,01 Довжина губок, мм 100 100 Кількість наконечників на 1 губці 10 1 Базування деталі на губках Так Ні Контроль площі контакту Так Ні Похибка базування, контакту, % 10 100 45 Проведений у таблиці порівняльний аналіз запропонованої корисної моделі "Штангенциркуль адаптивний" та швейцарського інноваційного штангенциркулю UL4 фірми Sylvac (5) підтверджує можливість практичної реалізації та переваги корисної моделі "Штангенциркуль адаптивний". 4 UA 113164 U 5 10 15 Запропонована корисна модель "Штангенциркуль адаптивний" значно зменшує похибку вимірювань за рахунок контролю базування та натискання на вимірювану деталь. Джерела інформації: 1. DIN 862. 2. Patent US № 20150059480. 3. Slide caliper. Patent US № 3113384. 4. "Штангенциркуль комп'ютерний. Патент № 99687. 5. Catalog Sylvac. Edition 8. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Штангенциркуль адаптивний, що складається з вимірювальної штанги з нерухомою губкою, рухомої рамки з відліковим пристроєм, рухомою губкою та пружним елементом, який відрізняється тим, що на обох губках симетрично розміщені дві групи дискретних стрижнів з пружинами та дискретними датчиками сили натискання, які приєднані до блока індикації дискретних натискань. 5 UA 113164 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ –42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01B 3/20
Мітки: адаптивний, штангенциркуль
Код посилання
<a href="https://ua.patents.su/8-113164-shtangencirkul-adaptivnijj.html" target="_blank" rel="follow" title="База патентів України">Штангенциркуль адаптивний</a>
Штангенциркуль адаптивний

Номер патенту: 112195
Опубліковано: 12.12.2016
Автор: Крамаренко Сергій Борисович
МПК: G01B 3/20
Мітки: адаптивний, штангенциркуль
Формула / Реферат:
Штангенциркуль адаптивний, що містить вимірювальну штангу, поєднану через фланці та подовжувачі з нерухомою губкою, також рухому рамку з відліковим пристроєм та рухому губку, який відрізняється тим, що вимірювальна штанга та подовжувачі встановлені на регульовані опори, мають переставні приціли, з вільного краю вимірювальної штанги встановлена горизонтальна зорова труба, а обидві губки мають вертикальні ампули, що встановлені на двох...
Штангенциркуль адаптивний
Номер патенту: 111194
Опубліковано: 10.11.2016
Автор: Крамаренко Сергій Борисович
МПК: G01B 3/20, G01B 21/32
Мітки: штангенциркуль, адаптивний
Формула / Реферат:
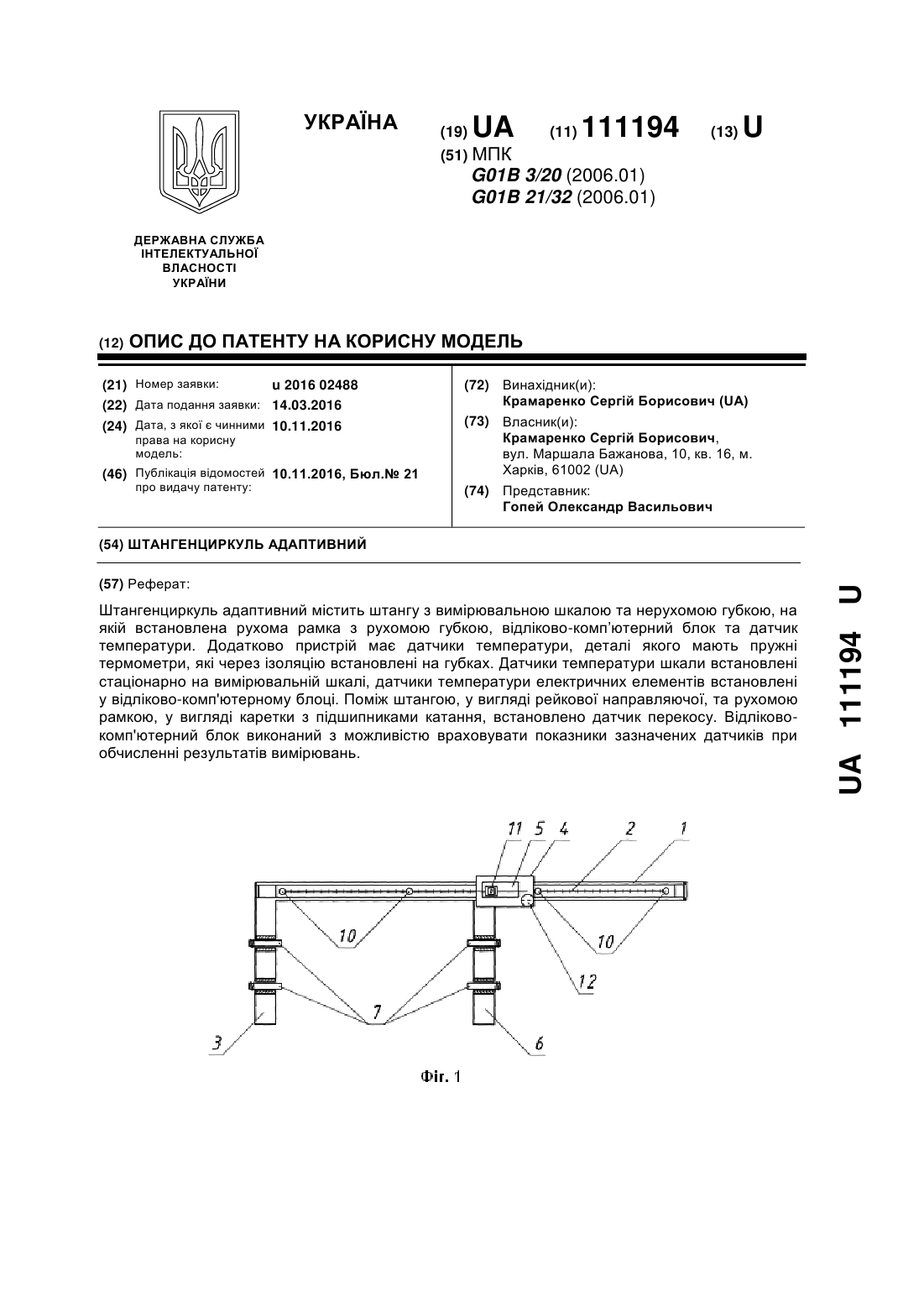
Штангенциркуль адаптивний, що містить штангу з вимірювальною шкалою та нерухомою губкою, на якій встановлена рухома рамка з рухомою губкою, відліково-комп’ютерний блок та датчик температури, який відрізняється тим, що має датчики температури, деталі якого мають пружні термометри, які через ізоляцію встановлені на губках, датчики температури шкали встановлені стаціонарно на вимірювальній шкалі, датчики температури електричних елементів...
Штангенциркуль адаптивний
Номер патенту: 111391
Опубліковано: 10.11.2016
Автор: Крамаренко Сергій Борисович
МПК: G01B 3/20
Мітки: адаптивний, штангенциркуль
Формула / Реферат:
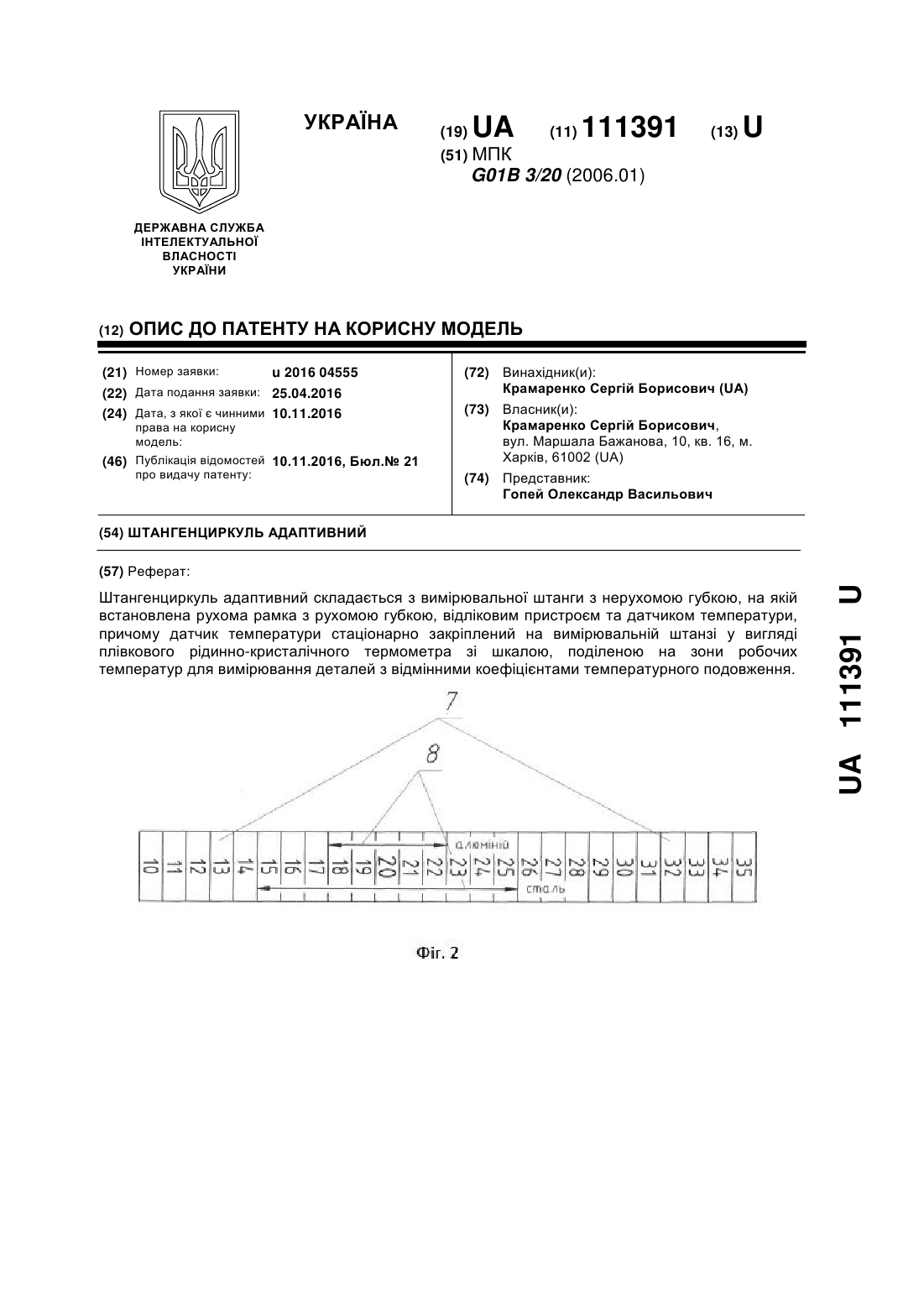
Штангенциркуль адаптивний складається з вимірювальної штанги з нерухомою губкою, на якій встановлена рухома рамка з рухомою губкою, відліковим пристроєм та датчиком температури, який відрізняється тим, що датчик температури стаціонарно закріплений на вимірювальній штанзі у вигляді плівкового рідинно-кристалічного термометра зі шкалою, поділеною на зони робочих температур для вимірювання деталей з відмінними коефіцієнтами температурного...
Штангенциркуль адаптивний
Номер патенту: 112254
Опубліковано: 12.12.2016
Автор: Крамаренко Сергій Борисович
МПК: G01B 3/20
Мітки: адаптивний, штангенциркуль
Формула / Реферат:
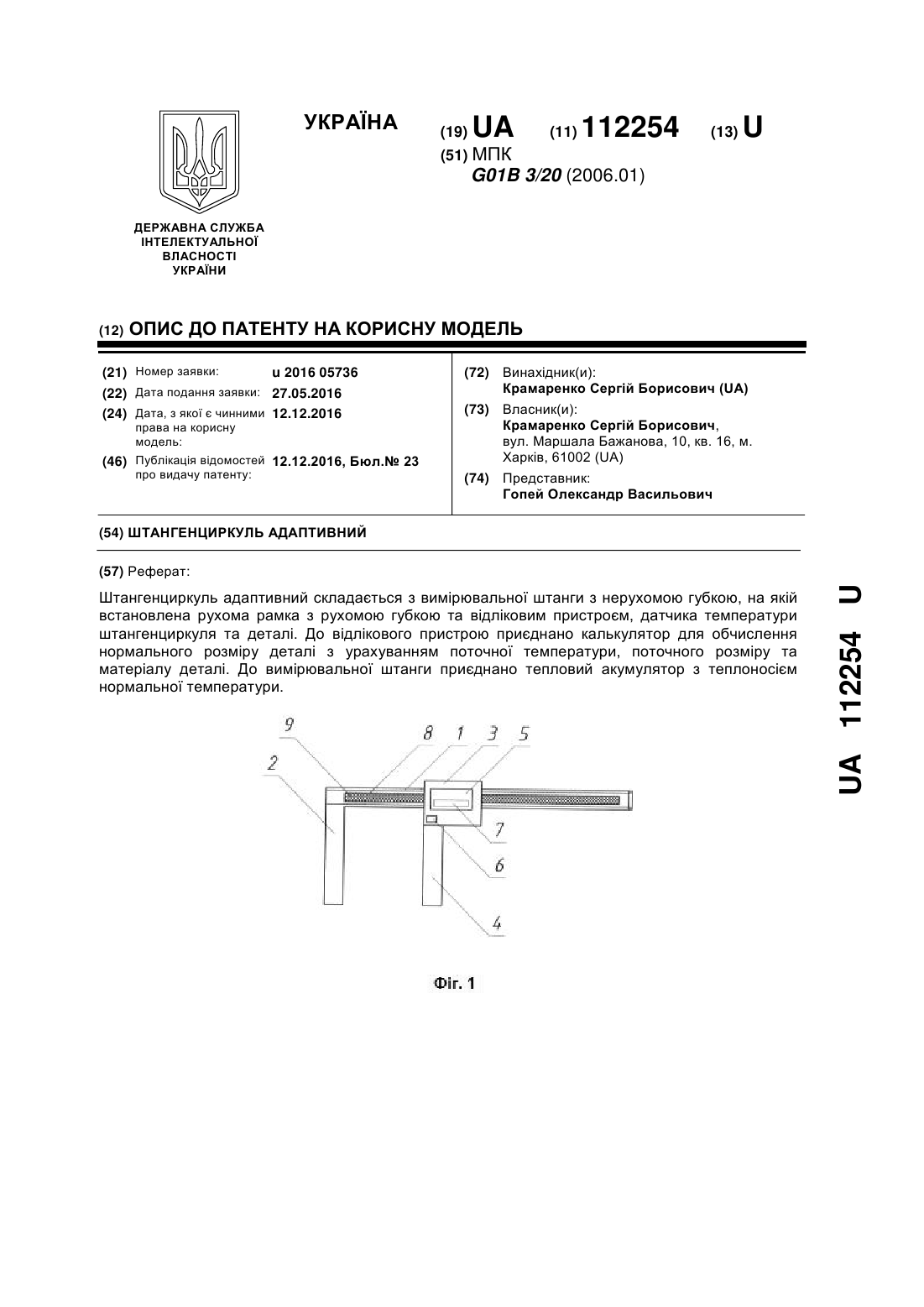
Штангенциркуль адаптивний, що складається з вимірювальної штанги з нерухомою губкою, на якій встановлена рухома рамка з рухомою губкою та відліковим пристроєм, датчика температури штангенциркуля та деталі, який відрізняється тим, що до відлікового пристрою приєднано калькулятор для обчислення нормального розміру деталі з урахуванням поточної температури, поточного розміру та матеріалу деталі, а до вимірювальної штанги приєднано тепловий...
Штангенциркуль адаптивний
Номер патенту: 112361
Опубліковано: 12.12.2016
Автор: Крамаренко Сергій Борисович
МПК: G01B 3/20
Мітки: штангенциркуль, адаптивний
Формула / Реферат:
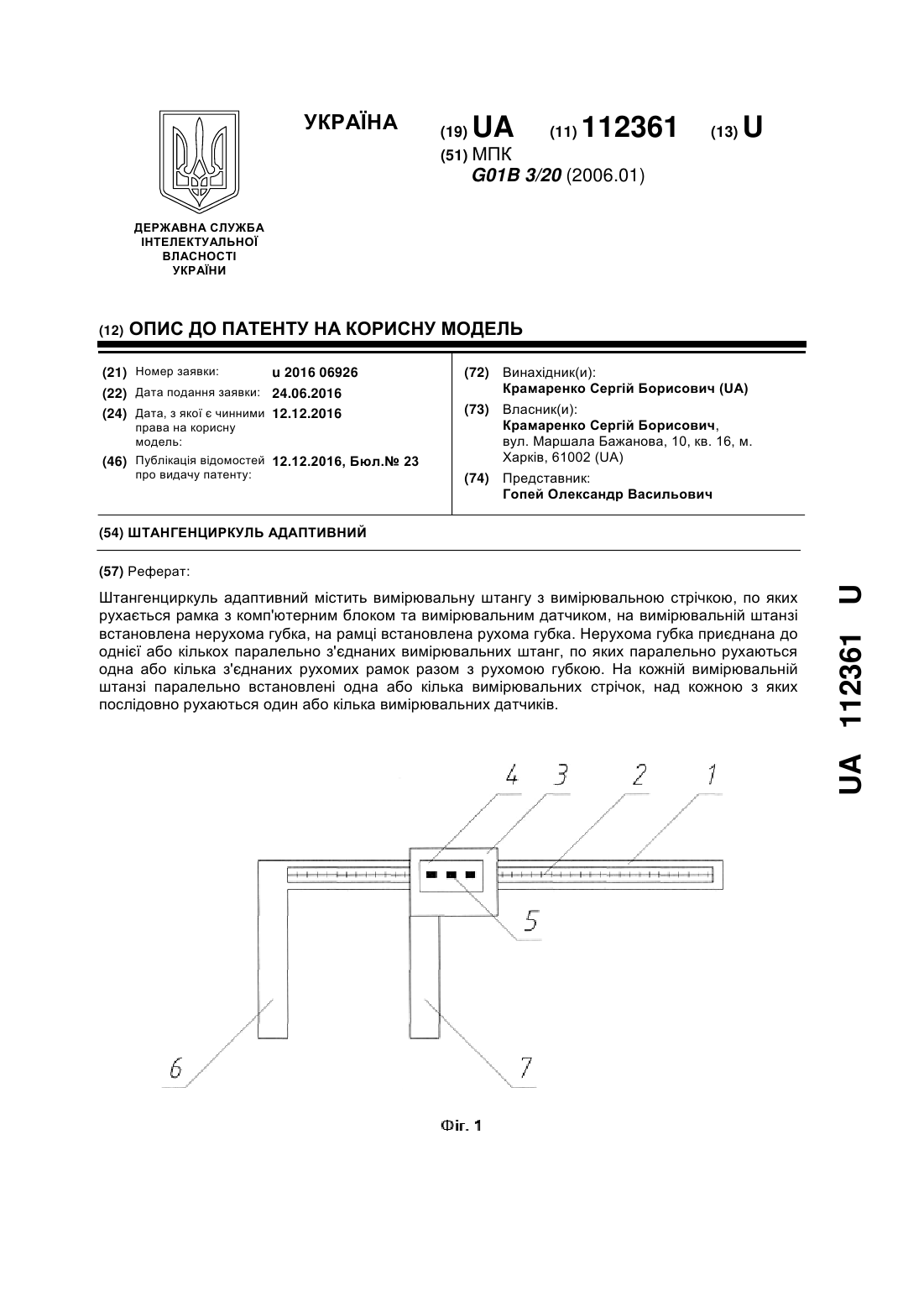
Штангенциркуль адаптивний, що складається з вимірювальної штанги з вимірювальною стрічкою, по яких рухається рамка з комп'ютерним блоком та вимірювальним датчиком, на вимірювальній штанзі встановлена нерухома губка, на рамці встановлена рухома губка, який відрізняється тим, що нерухома губка приєднана до однієї або кількох паралельно з'єднаних вимірювальних штанг, по яких паралельно рухаються одна або кілька з'єднаних рухомих рамок разом з...
Попередній патент: Комплексний тренажер-профілактор для оздоровлення хребта
Наступний патент: Рельєфний підключичний катетер
Випадковий патент: Болтове з'єднання з подовжуючим фланцем