Штангенциркуль адаптивний

Формула / Реферат
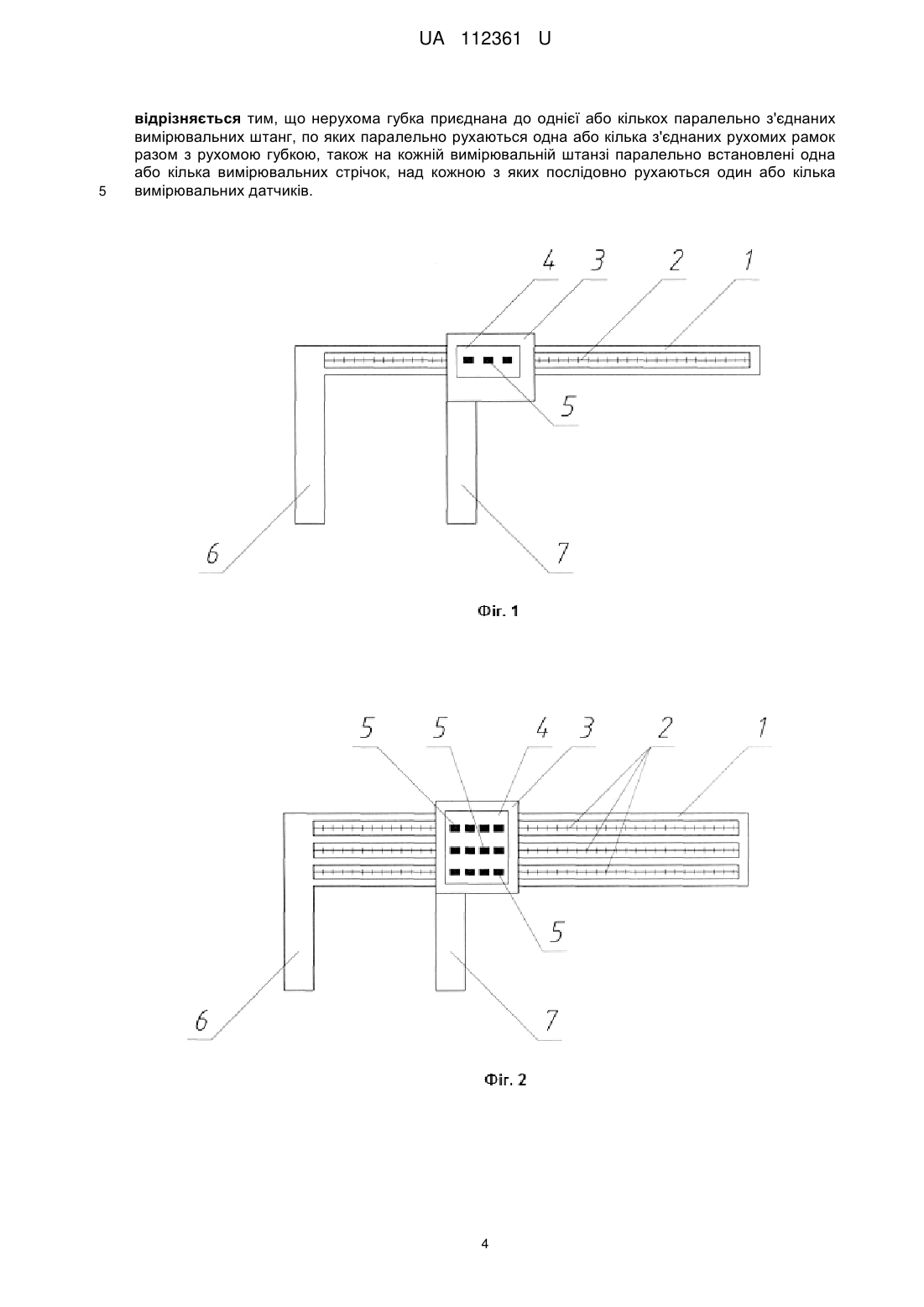
Штангенциркуль адаптивний, що складається з вимірювальної штанги з вимірювальною стрічкою, по яких рухається рамка з комп'ютерним блоком та вимірювальним датчиком, на вимірювальній штанзі встановлена нерухома губка, на рамці встановлена рухома губка, який відрізняється тим, що нерухома губка приєднана до однієї або кількох паралельно з'єднаних вимірювальних штанг, по яких паралельно рухаються одна або кілька з'єднаних рухомих рамок разом з рухомою губкою, також на кожній вимірювальній штанзі паралельно встановлені одна або кілька вимірювальних стрічок, над кожною з яких послідовно рухаються один або кілька вимірювальних датчиків.
Текст
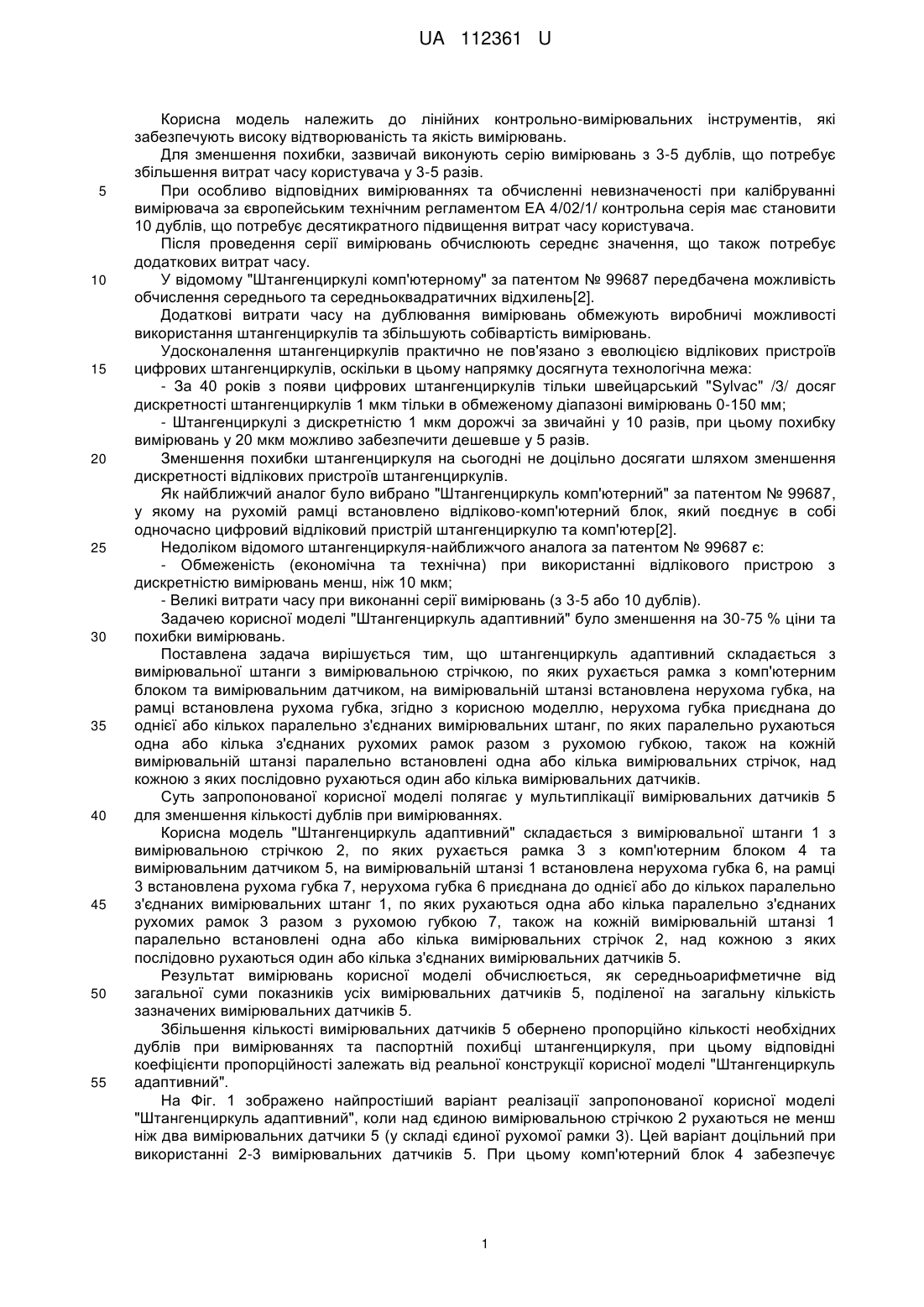
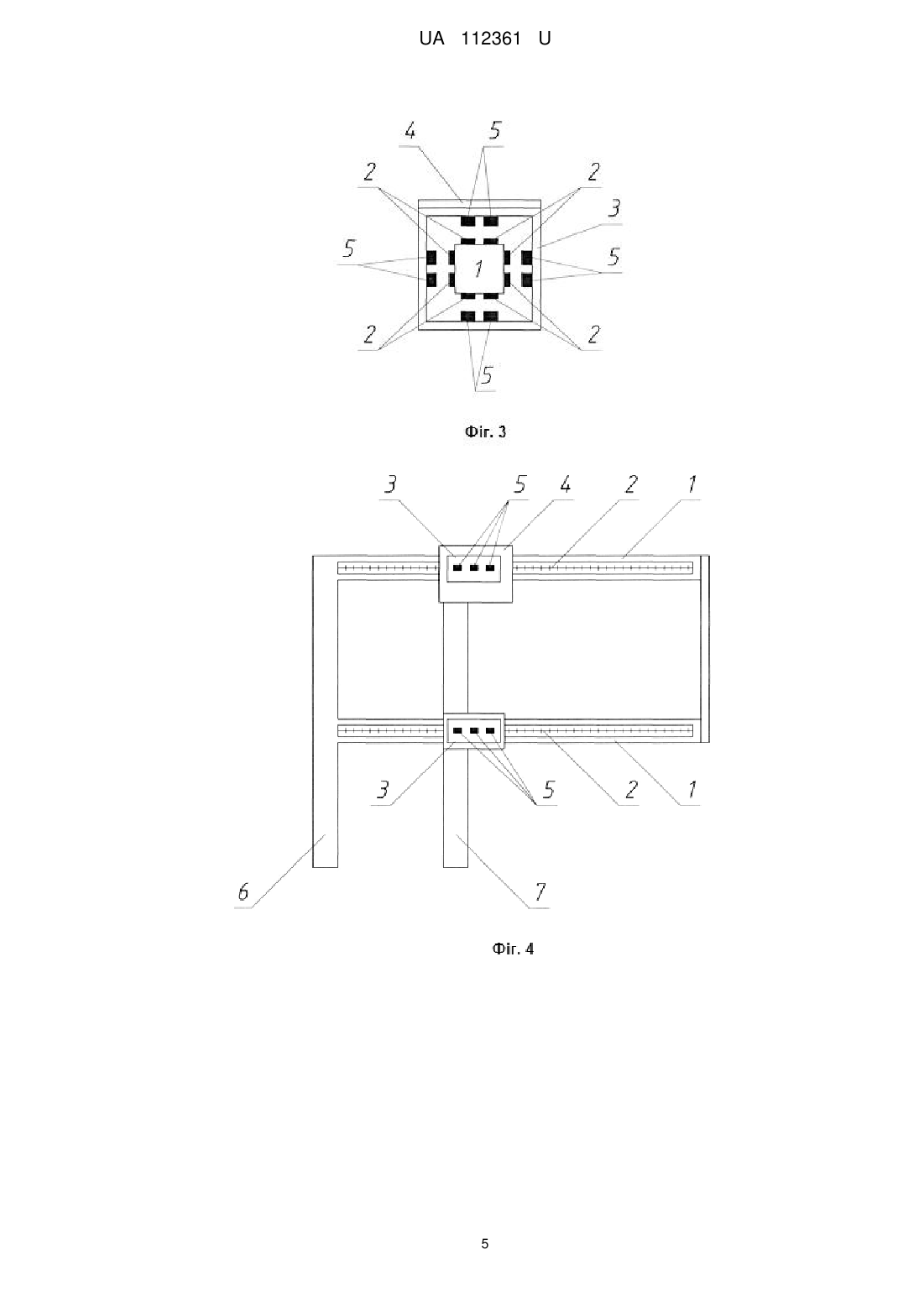
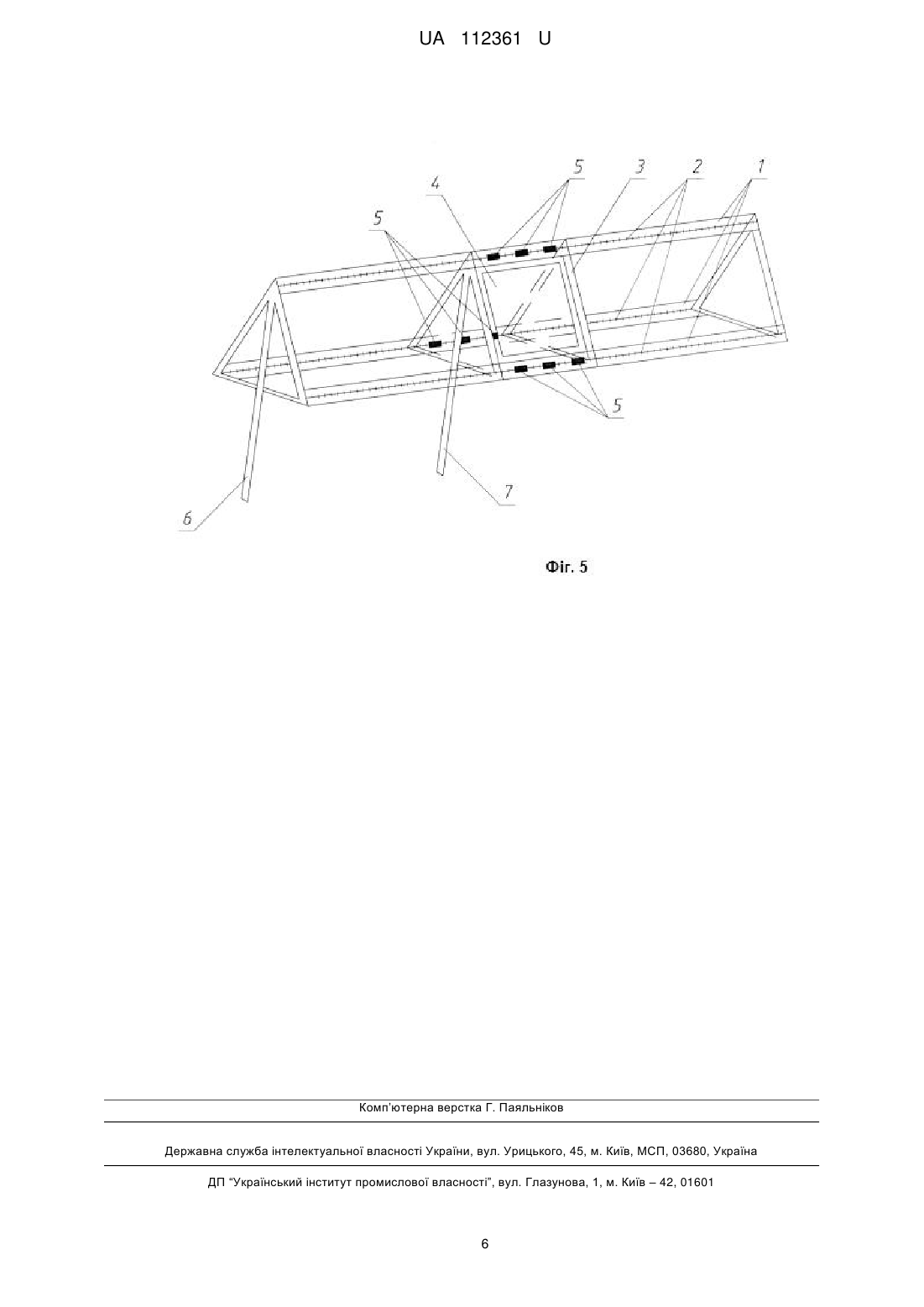
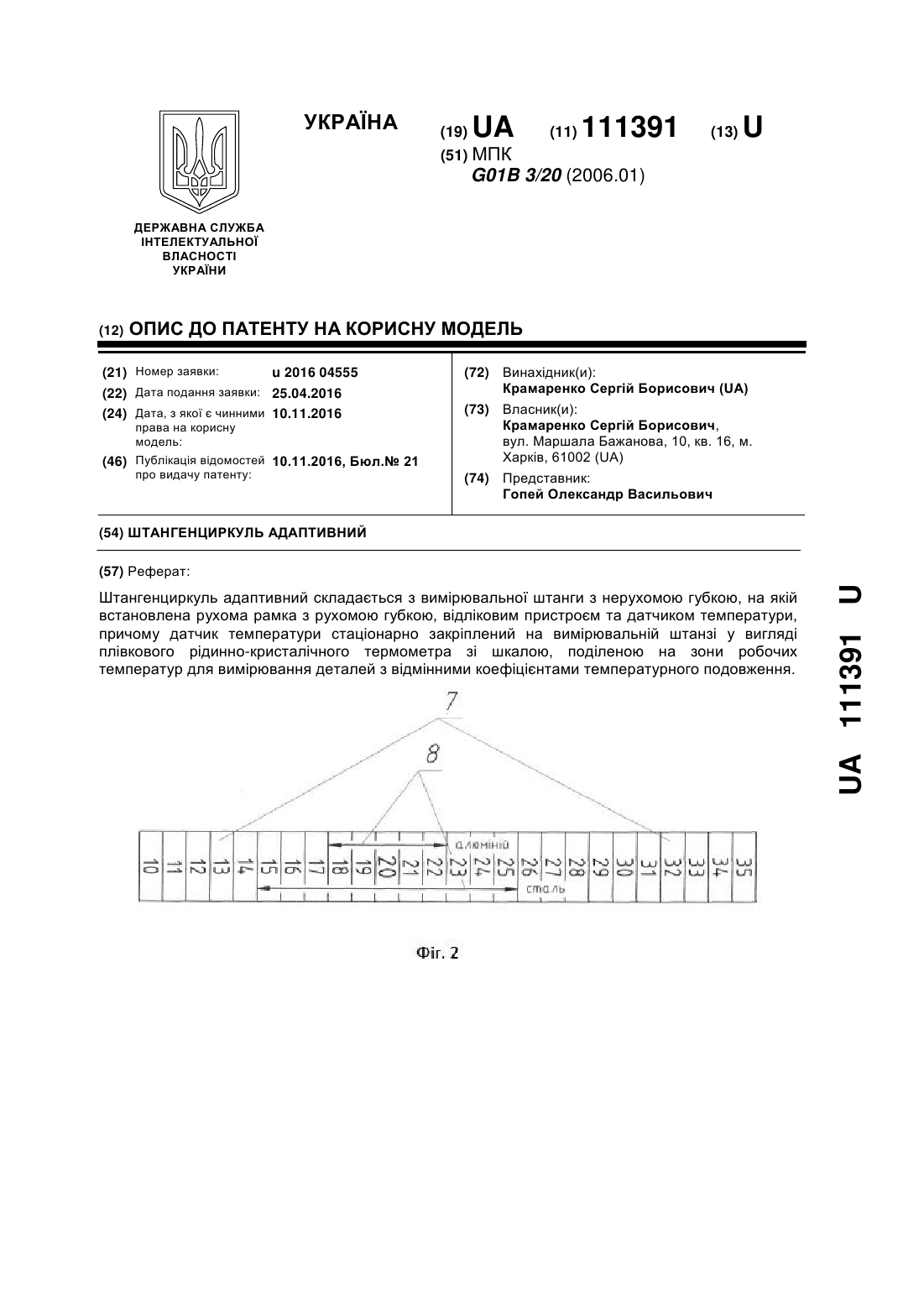
Реферат: UA 112361 U UA 112361 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до лінійних контрольно-вимірювальних інструментів, які забезпечують високу відтворюваність та якість вимірювань. Для зменшення похибки, зазвичай виконують серію вимірювань з 3-5 дублів, що потребує збільшення витрат часу користувача у 3-5 разів. При особливо відповідних вимірюваннях та обчисленні невизначеності при калібруванні вимірювача за європейським технічним регламентом ЕА 4/02/1/ контрольна серія має становити 10 дублів, що потребує десятикратного підвищення витрат часу користувача. Після проведення серії вимірювань обчислюють середнє значення, що також потребує додаткових витрат часу. У відомому "Штангенциркулі комп'ютерному" за патентом № 99687 передбачена можливість обчислення середнього та середньоквадратичних відхилень[2]. Додаткові витрати часу на дублювання вимірювань обмежують виробничі можливості використання штангенциркулів та збільшують собівартість вимірювань. Удосконалення штангенциркулів практично не пов'язано з еволюцією відлікових пристроїв цифрових штангенциркулів, оскільки в цьому напрямку досягнута технологічна межа: - За 40 років з появи цифрових штангенциркулів тільки швейцарський "Sylvac" /3/ досяг дискретності штангенциркулів 1 мкм тільки в обмеженому діапазоні вимірювань 0-150 мм; - Штангенциркулі з дискретністю 1 мкм дорожчі за звичайні у 10 разів, при цьому похибку вимірювань у 20 мкм можливо забезпечити дешевше у 5 разів. Зменшення похибки штангенциркуля на сьогодні не доцільно досягати шляхом зменшення дискретності відлікових пристроїв штангенциркулів. Як найближчий аналог було вибрано "Штангенциркуль комп'ютерний" за патентом № 99687, у якому на рухомій рамці встановлено відліково-комп'ютерний блок, який поєднує в собі одночасно цифровий відліковий пристрій штангенциркулю та комп'ютер[2]. Недоліком відомого штангенциркуля-найближчого аналога за патентом № 99687 є: - Обмеженість (економічна та технічна) при використанні відлікового пристрою з дискретністю вимірювань менш, ніж 10 мкм; - Великі витрати часу при виконанні серії вимірювань (з 3-5 або 10 дублів). Задачею корисної моделі "Штангенциркуль адаптивний" було зменшення на 30-75 % ціни та похибки вимірювань. Поставлена задача вирішується тим, що штангенциркуль адаптивний складається з вимірювальної штанги з вимірювальною стрічкою, по яких рухається рамка з комп'ютерним блоком та вимірювальним датчиком, на вимірювальній штанзі встановлена нерухома губка, на рамці встановлена рухома губка, згідно з корисною моделлю, нерухома губка приєднана до однієї або кількох паралельно з'єднаних вимірювальних штанг, по яких паралельно рухаються одна або кілька з'єднаних рухомих рамок разом з рухомою губкою, також на кожній вимірювальній штанзі паралельно встановлені одна або кілька вимірювальних стрічок, над кожною з яких послідовно рухаються один або кілька вимірювальних датчиків. Суть запропонованої корисної моделі полягає у мультиплікації вимірювальних датчиків 5 для зменшення кількості дублів при вимірюваннях. Корисна модель "Штангенциркуль адаптивний" складається з вимірювальної штанги 1 з вимірювальною стрічкою 2, по яких рухається рамка 3 з комп'ютерним блоком 4 та вимірювальним датчиком 5, на вимірювальній штанзі 1 встановлена нерухома губка 6, на рамці 3 встановлена рухома губка 7, нерухома губка 6 приєднана до однієї або до кількох паралельно з'єднаних вимірювальних штанг 1, по яких рухаються одна або кілька паралельно з'єднаних рухомих рамок 3 разом з рухомою губкою 7, також на кожній вимірювальній штанзі 1 паралельно встановлені одна або кілька вимірювальних стрічок 2, над кожною з яких послідовно рухаються один або кілька з'єднаних вимірювальних датчиків 5. Результат вимірювань корисної моделі обчислюється, як середньоарифметичне від загальної суми показників усіх вимірювальних датчиків 5, поділеної на загальну кількість зазначених вимірювальних датчиків 5. Збільшення кількості вимірювальних датчиків 5 обернено пропорційно кількості необхідних дублів при вимірюваннях та паспортній похибці штангенциркуля, при цьому відповідні коефіцієнти пропорційності залежать від реальної конструкції корисної моделі "Штангенциркуль адаптивний". На Фіг. 1 зображено найпростіший варіант реалізації запропонованої корисної моделі "Штангенциркуль адаптивний", коли над єдиною вимірювальною стрічкою 2 рухаються не менш ніж два вимірювальних датчики 5 (у складі єдиної рухомої рамки 3). Цей варіант доцільний при використанні 2-3 вимірювальних датчиків 5. При цьому комп'ютерний блок 4 забезпечує 1 UA 112361 U 5 10 15 20 25 30 35 40 45 50 55 60 розрахунок середньоарифметичного показника вимірювань та середньоквадратичних відхилень для кожного з вимірювальних датчиків 5. На Фіг. 2 зображено односторонній варіант реалізації запропонованої корисної моделі "Штангенциркуль адаптивний", коли на вимірювальній штанзі 1 закріплені кілька вимірювальних стрічок 2, над кожною з яких рухаються один або кілька вимірювальних датчиків 5 (у складі єдиної рухомої рамки 3). Цей варіант доцільний при використанні 4-16 вимірювальних датчиків 5. При цьому комп'ютерний блок 4 забезпечує розрахунки середньоарифметичних показників з середньоквадратичними відхиленнями для усього штангенциркулю, для окремої вимірювальної стрічки 2, для окремого вимірювального датчика 5. На Фіг. 3 зображено багатогранний варіант реалізації запропонованої корисної моделі "Штангенциркуль адаптивний", коли задіяні одна вимірювальна штанга 1 з кількома гранями, на яких закріплені вимірювальні стрічки 2 з відповідною кількістю вимірювальних датчиків 5 (на єдиній рухомій рамці 3). Зазвичай, кожна з 3-4 граней корисної моделі "Штангенциркуль адаптивний" за Фіг. 3, повторює пласку конструкцію подібно до Фіг. 1, з використанням 6-12 вимірювальних датчиків 5. При цьому комп'ютерний блок 4 забезпечує розрахунок середньоарифметичних показників та середньоквадратичних відхилень для усього штангенциркулю, для окремої грані на штанзі 1, для окремої вимірювальної стрічки 2, для окремою вимірювального датчика 5. На Фіг. 4 зображено подвійний (2D) варіант реалізації запропонованої корисної моделі "Штангенциркуль адаптивний", коли в єдиній площині з'єднані дві вимірювальні штанги 1, кожна з однією або кількома паралельними вимірювальними стрічками 2, над якими рухається відповідна кількість вимірювальних датчиків 5, розміщених на двох паралельно з'єднаних рухомих рамках 3. В корисній моделі за Фіг.4 рекомендовано використати дві симетричні пласкі конструкції, подібних до Фіг. 1 або Фіг.2, а загальна кількість вимірювальних датчиків 5 становить 4-24 одиниці. При цьому комп'ютерний блок 4 забезпечує розрахунок середньоарифметичних показників з середньоквадратичними відхиленнями для усього штангенциркулю, для кожної з двох вимірювальних штанг 1, для окремих вимірювальних стрічок 2, для окремих вимірювальних датчиків 5. Варіант корисної моделі "Штангенциркуль адаптивний" за Фіг. 4, завдяки рознесенню вимірювальних штанг 1 з вимірювальними стрічками 2 та вимірювальними датчиками 5, забезпечує кращі метрологічні показники в порівнянні з варіантами з однією вимірювальною штангою. На Фіг. 5 зображено 3D варіант реалізації запропонованої корисної моделі "Штангенциркуль адаптивний" з 3-4 паралельними вимірювальними штангами 1, рознесеними у просторі, кожна з яких, подібно до Фіг. 2, має одну або кілька паралельних вимірювальних стрічок 2 з відповідною кількістю вимірювальних датчиків 5 (у єдиній рухомій рамці 3), загальна кількість яких становить 12-96 одиниць. При цьому комп'ютерний блок 4 забезпечує розрахунок середньоарифметичних показників з середньоквадратичними відхиленнями для усього штангенциркулю, для окремої штанги 1, для окремої вимірювальної стрічки 2 та окремого вимірювального датчика 5. Найбільш складний та витратний 3D варіант корисної моделі "Штангенциркуль адаптивний", за Фіг. 5, забезпечує найвищу метрологічну якість та достовірність результатів вимірювань завдяки рознесенню у просторі 3-4 вимірювальних штанг 1 з вимірювальними стрічками 2 та вимірювальними датчиками 5. Вимірювальні датчики 5 з вимірювальними стрічками 2, функціонують на базі апробованих електрофізичних ефектів (ємнісних, магнітних, світлових, звукових, лазерних, ультразвукових та інших), перетворюючи лінійні переміщення рухомої рамки 3 в електричні або інші сигнали, які приймає, обробляє та відображає комп'ютерний блок 4. Комп'ютерний блок 4 корисної моделі "Штангенциркуль адаптивний" складається зі спеціального мікрокомп'ютера (для обробки сигналів від вимірювальних датчиків 5) та власного сенсорного екрану, який відображає наступну інформацію: - "Загальні" середньоарифметичні показники та середньоквадратичні відхилення для усіх разом та кожного окремого вимірювального датчика 5; - "Стрічкові" середньоарифметичні показники з середньоквадратичними відхиленнями для окремої групи вимірювальних датчиків 5 над кожною окремою вимірювальною стрічкою 2; - "Штангові" середньоарифметичні показники з середньоквадратичними відхиленнями для групи вимірювальних датчиків 5 на кожній окремій вимірювальній штанзі 1; - "Рамкові" середньоарифметичні показники з середньоквадратичним відхиленням для групи вимірювальних датчиків 5 на кожній окремій рухомій рамці 3; - "Датчикові" середньоарифметичні показники з середньоквадратичними відхиленнями для кожного з вимірювальних датчиків 5; - Інші показники за бажанням користувача. 2 UA 112361 U 5 10 15 20 25 30 Порівняння середньоарифметичних показників та середньоквадратичних відхилень для окремих складових частин та вузлів корисної моделі "Штангенциркуль адаптивний" (штанг 1, рухомих рамок 3, вимірювальних стрічок 2, вимірювальних датчиків 5) надає можливість поточної діагностики техніко-метрологічного стану цих окремих частин. Вимірювання деталей за допомогою корисної моделі "Штангенциркуль адаптивний" виконуються наступним чином: 1) Перед початком вимірювань: - рухому губку 7 наближають до торкання з нерухомою губкою 6, при цьому усі вимірювальні датчики 5 знаходяться у начальному положенні відносно відповідних вимірювальних стрічок 2; - встановлюють на "0" усі вимірювальні датчики 5 натисканням на відповідний сенсор на екрані комп'ютерного блока 4; - на сенсорному екрані комп'ютерного блока 4 задають необхідний ("Загальний", "Стрічковий", "Штанговий" або інший) алгоритм обчислень відповідних середньоарифметичних показників та середньоквадратичних відхилень. 2) Вимірювану деталь затискають поміж губками 6 та 7, при цьому вимірювальні датчики 5 визначають переміщення відносно відповідних вимірювальних стрічок 2, а комп'ютерний блок 4 обчислює поточні показники та відображає їх на екрані; 3) Користувач зчитує з екрану комп'ютерного блока 4 "Загальні" поточні показники вимірювань штангенциркулем; 4) Користувач може контролювати поточні показники окремих штанг 1, окремих рухомих рамок 3, окремих вимірювальних стрічок 2, окремих вимірювальних датчиків 5 шляхом вибору відповідного алгоритму на сенсорному екрані комп'ютерного блока 4; 5) У разі повторних вимірювань виконують переходи 2…4. Робота з корисною моделлю "Штангенциркуль адаптивний" не потребує особових знані, та навичок, оскільки запропонована конструкція виключає суб'єктивний фактор при вимірюваннях та обчисленнях. Відповідно до формули корисної моделі "Штангенциркуль адаптивний" заявником були виготовлений експериментальний зразок за Фіг. 1 та виконано метрологічний аналіз в порівнянні з кращими у світі штангенциркулями Sylvac (Швейцарія) /3/, див. Таблицю. Порівняльний аналіз підтвердив безумовні переваги корисної моделі "Штангенциркуль адаптивний" діапазону 0-2000 мм над кращими у світі швейцарськими штангенциркулями /3/ в частині зменшення вартості виробництва та використання. Таблиця Порівняльні показники штангенциркулів цифрових з діапазоном 0-2000 мм Діапазон вимірювань, мм Дискретність вимірювань, мкм Кількість відлікових датчиків Похибка вимірювань, мкм Витрати на вимірювання, % Вартість штангенциркулю, % 35 40 45 Значення показників та функцій Корисна модель "Штангенциркуль Штангенциркуль UL4 фірми адаптивний» Sylvac /3/ 0-2000 0-2000 10 10 4 1 60 120 33 100 45 100 Проведений у таблиці порівняльний аналіз запропонованої корисної моделі "Штангенциркуль адаптивний" та швейцарського інноваційного штангенциркулю UL4 фірми Sylvac /3/ підтверджує можливість практичної реалізації та переваги корисної моделі "Штангенциркуль адаптивний". Запропонована корисна модель "Штангенциркуль адаптивний" значно зменшує собівартість та підвищує якість вимірювань. 1. ЕА 4/02 "Expression of the uncertainly of measuring in calibration". 2. Штангенциркуль комп'ютерний. Крамаренко С.Б. Патент № 99687. 2015 р. 3. Catalog "Sylvac". Edition 8. 2015. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Штангенциркуль адаптивний, що складається з вимірювальної штанги з вимірювальною стрічкою, по яких рухається рамка з комп'ютерним блоком та вимірювальним датчиком, на вимірювальній штанзі встановлена нерухома губка, на рамці встановлена рухома губка, який 3 UA 112361 U 5 відрізняється тим, що нерухома губка приєднана до однієї або кількох паралельно з'єднаних вимірювальних штанг, по яких паралельно рухаються одна або кілька з'єднаних рухомих рамок разом з рухомою губкою, також на кожній вимірювальній штанзі паралельно встановлені одна або кілька вимірювальних стрічок, над кожною з яких послідовно рухаються один або кілька вимірювальних датчиків. 4 UA 112361 U 5 UA 112361 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01B 3/20
Мітки: штангенциркуль, адаптивний
Код посилання
<a href="https://ua.patents.su/8-112361-shtangencirkul-adaptivnijj.html" target="_blank" rel="follow" title="База патентів України">Штангенциркуль адаптивний</a>
Штангенциркуль адаптивний

Номер патенту: 112195
Опубліковано: 12.12.2016
Автор: Крамаренко Сергій Борисович
МПК: G01B 3/20
Мітки: штангенциркуль, адаптивний
Формула / Реферат:
Штангенциркуль адаптивний, що містить вимірювальну штангу, поєднану через фланці та подовжувачі з нерухомою губкою, також рухому рамку з відліковим пристроєм та рухому губку, який відрізняється тим, що вимірювальна штанга та подовжувачі встановлені на регульовані опори, мають переставні приціли, з вільного краю вимірювальної штанги встановлена горизонтальна зорова труба, а обидві губки мають вертикальні ампули, що встановлені на двох...
Штангенциркуль адаптивний
Номер патенту: 111391
Опубліковано: 10.11.2016
Автор: Крамаренко Сергій Борисович
МПК: G01B 3/20
Мітки: адаптивний, штангенциркуль
Формула / Реферат:
Штангенциркуль адаптивний складається з вимірювальної штанги з нерухомою губкою, на якій встановлена рухома рамка з рухомою губкою, відліковим пристроєм та датчиком температури, який відрізняється тим, що датчик температури стаціонарно закріплений на вимірювальній штанзі у вигляді плівкового рідинно-кристалічного термометра зі шкалою, поділеною на зони робочих температур для вимірювання деталей з відмінними коефіцієнтами температурного...
Штангенциркуль адаптивний
Номер патенту: 111194
Опубліковано: 10.11.2016
Автор: Крамаренко Сергій Борисович
МПК: G01B 3/20, G01B 21/32
Мітки: штангенциркуль, адаптивний
Формула / Реферат:
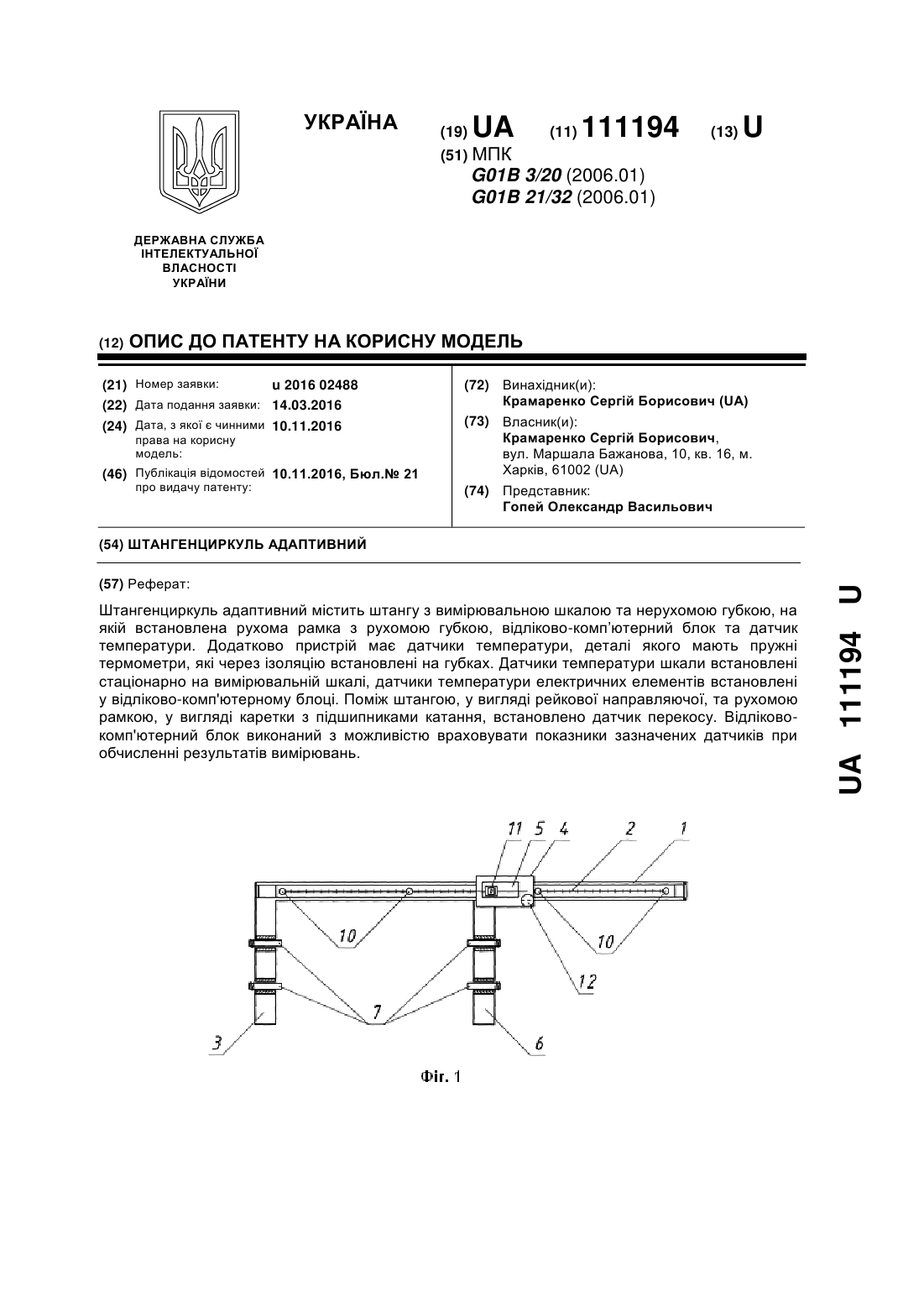
Штангенциркуль адаптивний, що містить штангу з вимірювальною шкалою та нерухомою губкою, на якій встановлена рухома рамка з рухомою губкою, відліково-комп’ютерний блок та датчик температури, який відрізняється тим, що має датчики температури, деталі якого мають пружні термометри, які через ізоляцію встановлені на губках, датчики температури шкали встановлені стаціонарно на вимірювальній шкалі, датчики температури електричних елементів...
Штангенциркуль адаптивний
Номер патенту: 112254
Опубліковано: 12.12.2016
Автор: Крамаренко Сергій Борисович
МПК: G01B 3/20
Мітки: адаптивний, штангенциркуль
Формула / Реферат:
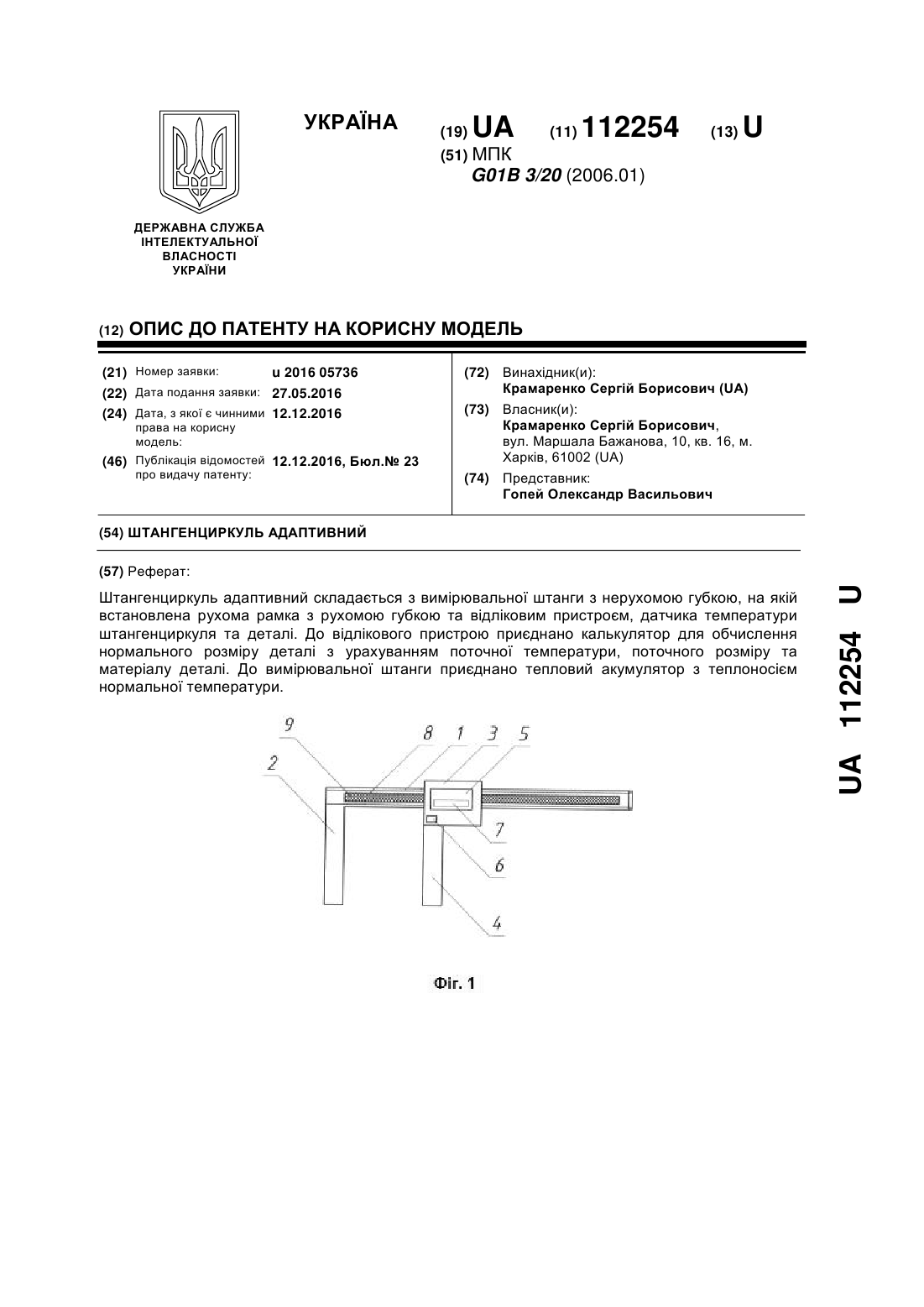
Штангенциркуль адаптивний, що складається з вимірювальної штанги з нерухомою губкою, на якій встановлена рухома рамка з рухомою губкою та відліковим пристроєм, датчика температури штангенциркуля та деталі, який відрізняється тим, що до відлікового пристрою приєднано калькулятор для обчислення нормального розміру деталі з урахуванням поточної температури, поточного розміру та матеріалу деталі, а до вимірювальної штанги приєднано тепловий...
Штангенциркуль з великими губками
Номер патенту: 111603
Опубліковано: 10.11.2016
Автор: Крамаренко Сергій Борисович
МПК: G01B 3/20
Мітки: штангенциркуль, губками, великими
Формула / Реферат:
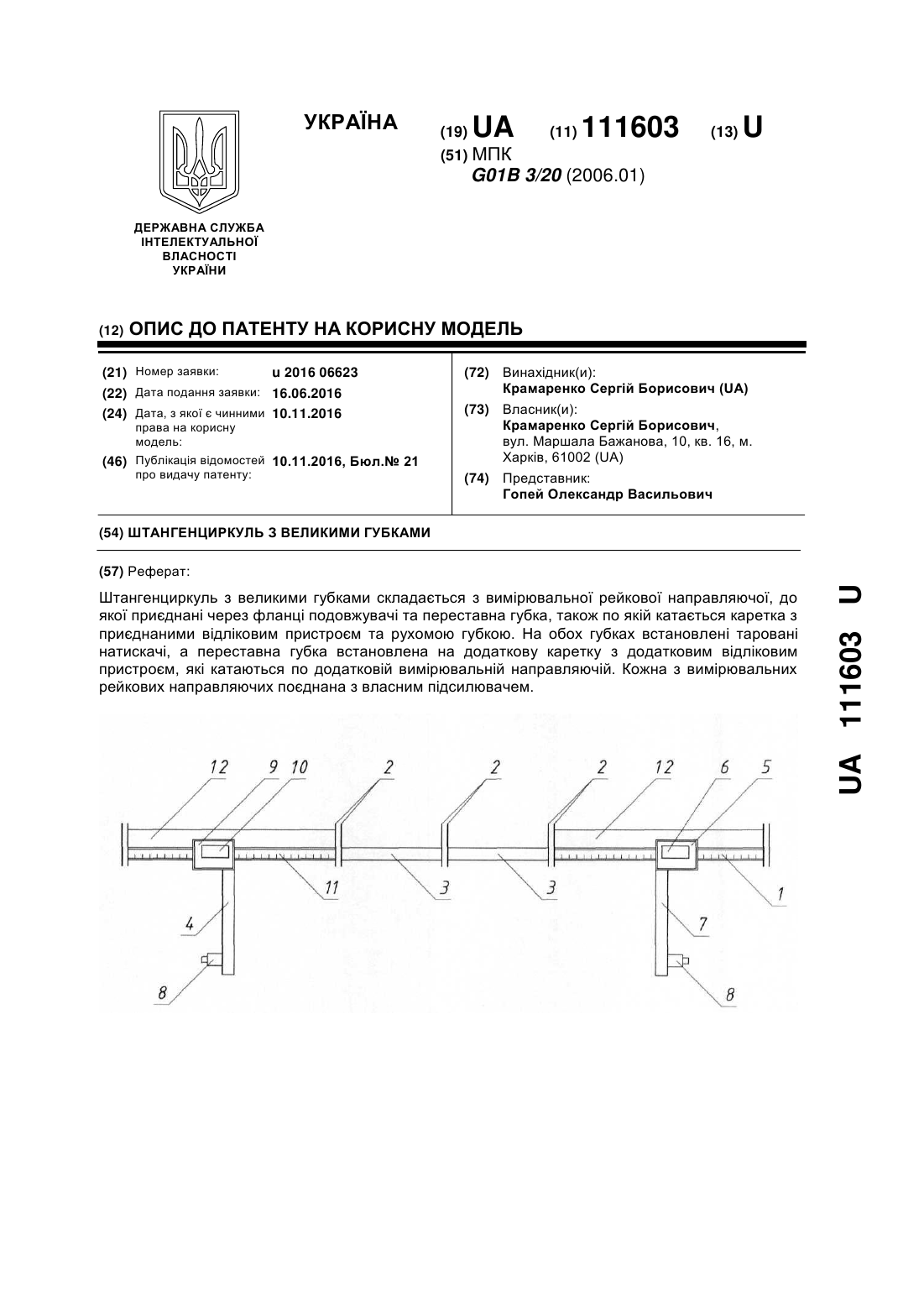
Штангенциркуль з великими губками, що складається з вимірювальної рейкової направляючої, до якої приєднані через фланці подовжувачі та переставна губка, також по якій катається каретка з приєднаними відліковим пристроєм та рухомою губкою, який відрізняється тим, що на обох губках встановлені таровані натискачі, а переставна губка встановлена на додаткову каретку з додатковим відліковим пристроєм, які катаються по додатковій вимірювальній...
Попередній патент: Біполярний аденотом
Наступний патент: Спосіб статичних випробувань спінальних імплантатів на згин при стиску
Випадковий патент: Склад електроліту для електрохімічного синтезу діоксиду мангану як активного сорбенту знешкодження домішок нафтопродуктів у воді