Штангенциркуль адаптивний

Формула / Реферат
Штангенциркуль адаптивний, що містить штангу з вимірювальною шкалою та нерухомою губкою, на якій встановлена рухома рамка з рухомою губкою, відліково-комп’ютерний блок та датчик температури, який відрізняється тим, що має датчики температури, деталі якого мають пружні термометри, які через ізоляцію встановлені на губках, датчики температури шкали встановлені стаціонарно на вимірювальній шкалі, датчики температури електричних елементів встановлені у відліково-комп'ютерному блоці, також поміж штангою, у вигляді рейкової направляючої, та рухомою рамкою, у вигляді каретки з підшипниками катання, встановлено датчик перекосу, причому відліково-комп'ютерний блок виконаний з можливістю враховувати показники зазначених датчиків при обчисленні результатів вимірювань.
Текст
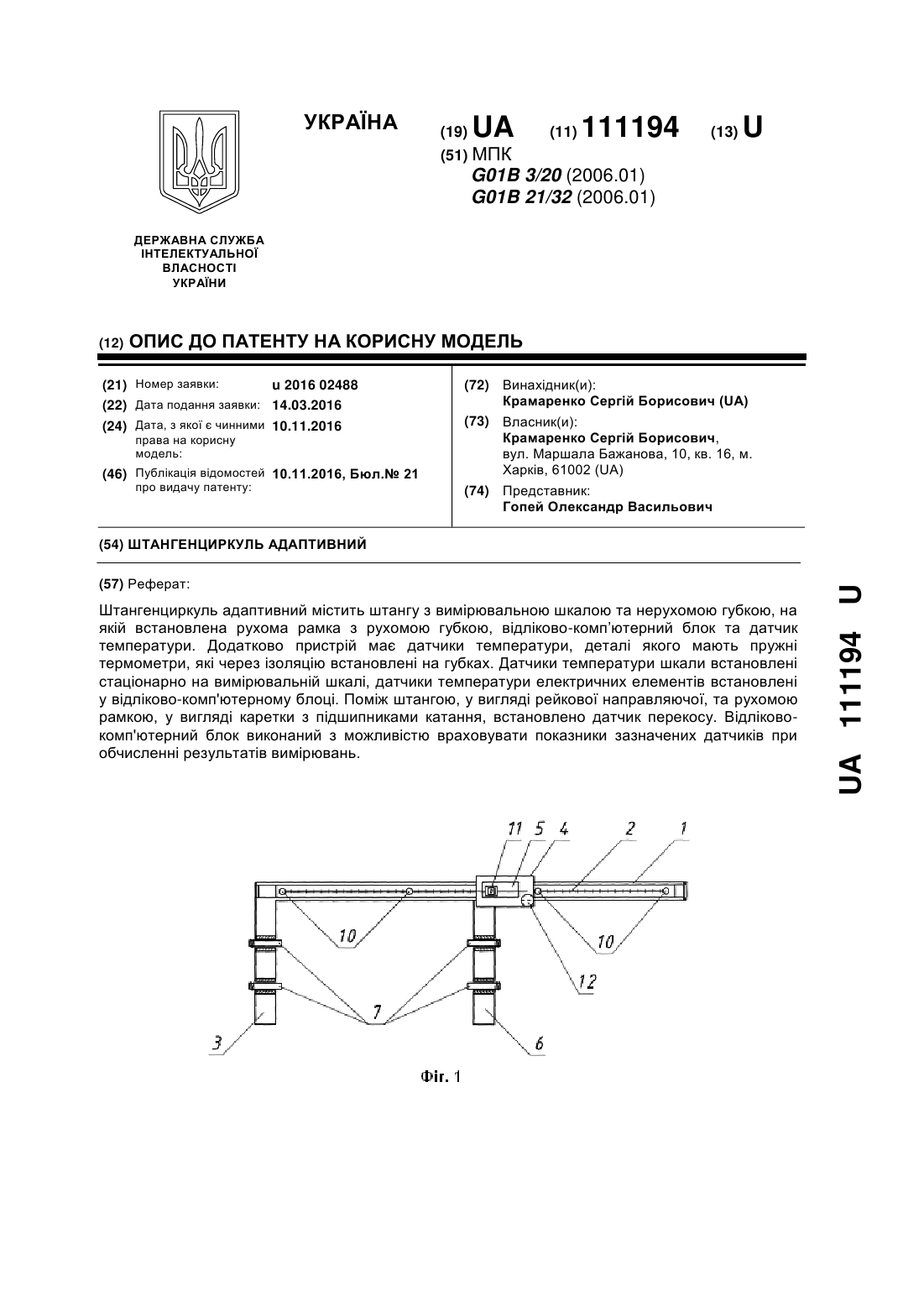
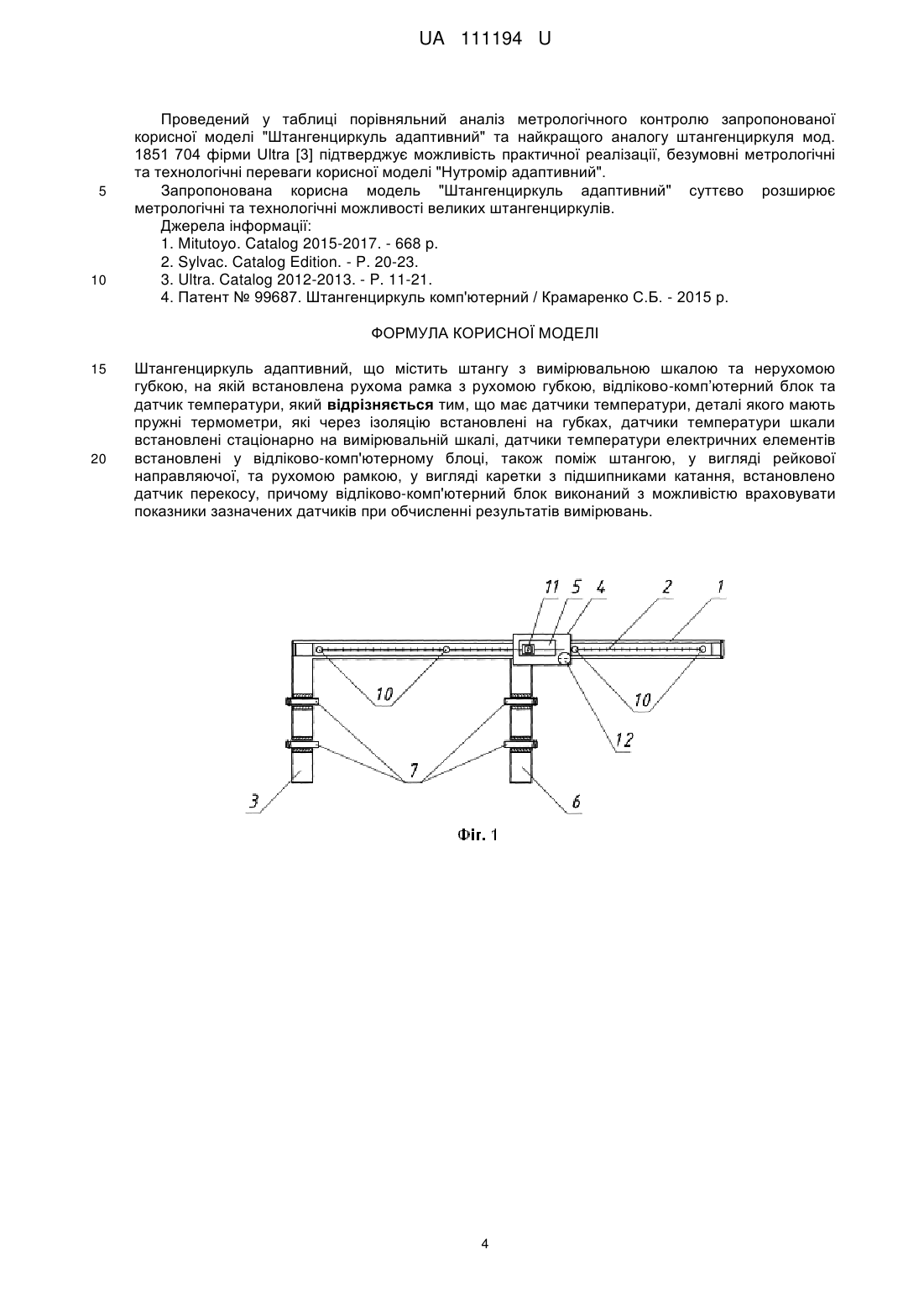
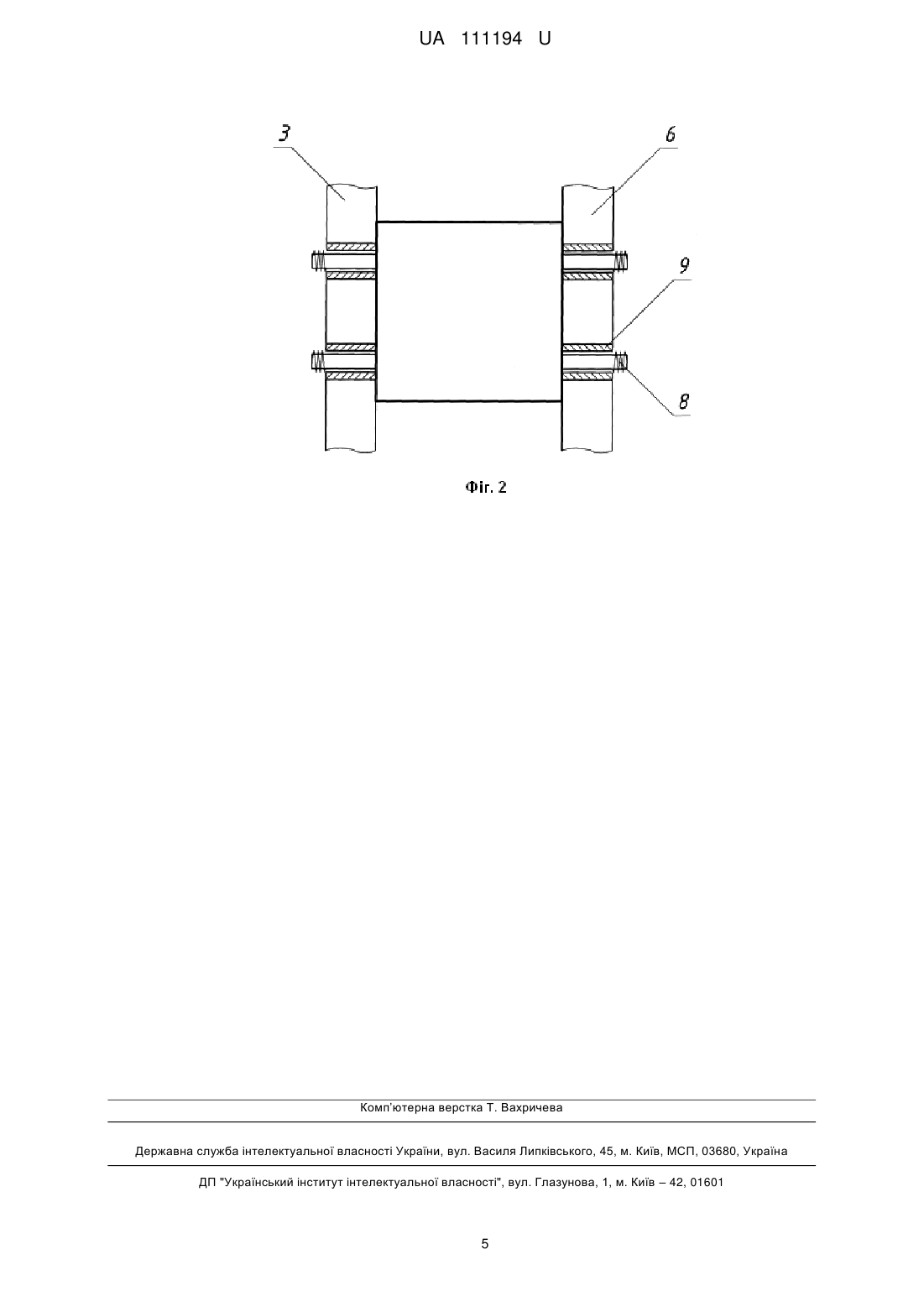
Реферат: Штангенциркуль адаптивний містить штангу з вимірювальною шкалою та нерухомою губкою, на якій встановлена рухома рамка з рухомою губкою, відліково-комп’ютерний блок та датчик температури. Додатково пристрій має датчики температури, деталі якого мають пружні термометри, які через ізоляцію встановлені на губках. Датчики температури шкали встановлені стаціонарно на вимірювальній шкалі, датчики температури електричних елементів встановлені у відліково-комп'ютерному блоці. Поміж штангою, у вигляді рейкової направляючої, та рухомою рамкою, у вигляді каретки з підшипниками катання, встановлено датчик перекосу. Відліковокомп'ютерний блок виконаний з можливістю враховувати показники зазначених датчиків при обчисленні результатів вимірювань. UA 111194 U (54) ШТАНГЕНЦИРКУЛЬ АДАПТИВНИЙ UA 111194 U UA 111194 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до контрольно-вимірювальних інструментів для вимірювань габаритних деталей. Запропонований штангенциркуль адаптивний може застосовуватися у машинобудуванні та літакобудуванні, всюди, де необхідні достовірні вимірювання габаритних деталей в реальних виробничих умовах. Штангенциркулі вважаються досить грубим вимірювачем з обмеженим розміром вимірювальних губок та температурним діапазоном, що пов'язано з великою похибкою вимірювань від перекосу рухомої рамки та від впливу температури на штангенциркуль та на довжину деталі. Конструкція сучасних штангенциркулів включає пересування пружної рухомої рамки по вимірювальній штанзі без контролю перекосу рамки. В конструкції кожного штангенциркуля свідомо порушується принцип Аббе, коли за рахунок довжини губок та перекосу рухомої рамки завжди виникає похибка, яка прямо пропорційна перекосу рухомої рамки та довжині вимірювальних губок [1]. При вимірюваннях великих деталей виникає температурна похибка за рахунок температурного подовження, яка прямо пропорційна до вимірювального розміру та температури деталі. Для аналогових штангенциркулів температурна похибка пов'язана з температурним розширенням вимірювальної штанги (зазвичай стальної) та прямо залежить від її довжини та температури. Для цифрових штангенциркулів температурна похибка залежить від низки факторів, які донині не враховуються при виготовленні та використанні штангенциркулів: - температура зовнішнього середовища в поєднанні з розігрівом електричних елементів на платі цифрового відлікового пристрою можуть істотно спотворити дійсні результати вимірювань цифрового штангенциркуля, а низька теплопровідність плати дає локальний перегрів; - зовнішня температура в поєднанні з теплом рук користувача ведуть до теплового розширення вимірювальної шкали та штанги, на якій вона закріплена, що викликає теплову похибку, яка прямо пропорційна температурі, довжині вимірювань та температурному коефіцієнту лінійного розширення (ТКЛР) матеріалу шкали, зазвичай із фольгового склотекстоліту; - штанги усіх великих цифрових штангенциркулів виготовляють зі сталі, карбону або алюмінію, які мають різні ТКЛР (10,5…24 мкм/м.град.), що надає додаткову похибку. Довжина вимірювальних губок регламентована потребами користувача. Для виготовлення великих штангенциркулів-аналогів зазвичай використовують посилені штанги та рухомі рамки: - карбонові штанги шириною 32 мм для штангенциркулів серії 552 фірми "Mitutoyo" (Японія) з довжиною губок до 150 мм [1]; - штанги з алюмінієвого профілю з підсилюючими сталевими полосами загальною шириною 38 мм у мод. для серії UL4 фірми "Sylvac" (Швейцарія) 121 з довжиною вимірювальних губок 300-400 мм; - карбонові подвійні штанги, кожна шириною 48 мм для серії 700 фірми "Ultra" (Німеччина) з довжиною губок 200-500 мм [3]. Сучасні штангенциркулі використовують ковзання пружної рухомої рамки по штанзі. Завдяки можливому перекосу рамки вони досить вразливі до прикладання різноманітних сил, включаючи вагу рухомої губки або силу притискання до деталі. Навіть в посилених штангенциркулях з подвійною штангою довжина губок обмежена 500 мм [3], що пов'язано зі зростанням похибки вимірювань при перекосі рухомої рамки. Задачею розробки корисної моделі Штангенциркуль адаптивний є зменшення на 25-60 % похибки вимірювань деталей та збільшення у 2-5 рази довжини губок шляхом зменшення та компенсації перекосу вимірювальної рамки, також компенсації температурних відхилень в штангенциркулі та деталі. За найближчий аналог вибрано "Штангенциркуль комп'ютерний" за патентом №99687 [4], в якому до відліково-комп'ютерного блока на рухомій рамці штангенциркуля підключено датчик температури. Датчик температури у прототипі [4] поперемінно визначає дійсні температури при встановленні на штангенциркуль та на деталь, після чого коригують похибку вимірювань. Недоліками відомого штангенциркуля-прототипу за патентом № 99687 [4] є: - наявність лише одного переставного датчика, який поперемінно вимірює температуру або штангенциркуля, або деталі; - неможливість постійного оперативного контролю та врахування температури деталі в процесі вимірювань; 1 UA 111194 U 5 10 15 20 25 30 35 40 45 50 55 - неможливість постійного оперативного контролю та врахування температури окремих частин штангенциркуля, включаючи локально нагріту плату цифрового відлікового пристрою, різницю температур окремих частин вимірювальної шкали від руки користувача; - перекіс рухомої рамки в поєднанні з подовженими губками суттєво впливають на похибку вимірювань та обмежують збільшення довжини губок. Вирішення поставленої задачі корисної моделі "Штангенциркуль адаптивний" полягає у наступному: - механічно стабілізовано рух рамки по вимірювальній штанзі штангенциркуля та встановлено датчик перекосу рамки з компенсацією впливу цього перекосу на результати вимірювань; - встановлені постійні датчики вимірювання температури, деталі та окремі елемент штангенциркуля з безперервною компенсацією температурного впливу на результати вимірювань. Штангенциркуль адаптивний складається зі штанги 1 з вимірювальною шкалою 2 та нерухомою губкою 3, на якій встановлена рухома рамка 4 з рухомою губкою 6, відліковокомп'ютерним блоком 5 та датчиком температури, згідно з корисною моделлю, датчики 7 температури, деталі яких мають пружні термометри 8, які через термоізоляцію 9 встановлені на губках 3 та 6, датчики 10 температури шкали встановлені стаціонарно на вимірювальній шкалі 2, датчики 11 температури електричних елементів встановлені у відліково-комп'ютерному блоці 5, також поміж штангою 1, у вигляді рейкової напрямної, та рухомою рамкою 4, у вигляді каретки з підшипниками катання, встановлено датчик перекосу 12, при цьому відліково-комп'ютерний блок 5 враховує показники зазначених датчиків при обчисленні результатів вимірювань. Датчики 7 температури, деталі яких з пружним термометром 8 через термоізоляцію 9 встановлені на одній або на обох губках (3 та/або 6) та приєднані до відліково-комп'ютерного блока 5 дротовим або бездротовим способом. Датчики 7 температури, деталі яких у вигляді пружних термометрів 8 мають теплоізоляцію 9 від губок та встановлені вздовж робочої поверхні губок (3 та/або 6), відповідно до потреб користувачів. Пружні термометри 8 перед початком вимірювань виступають перед робочою поверхнею губок, щоб забезпечити постійний надійний механічний тепловий контакт з деталлю в процесі вимірювань. Деталь при зчитуванні показників вимірювань має утримуватися поміж вимірювальними губками 3 та 6, а пружні термометри 8 мають притискатися зі значно меншим зусиллям, щоб не спотворювати оптимальне зусилля вимірювань. В процесі вимірювань пружні термометри 8 вдавлюються поверхнею деталі доти, поки деталь не затискається поміж робочими поверхнями губок 3 та 6 з необхідним зусиллям вимірювань, з можливістю забезпечення постійного механічного теплового контакту пружних термометрів 8 з деталлю. Датчики 10 температури шкали, встановлені вздовж вимірювальної шкали 2 на фіксованих відстанях поміж собою, дозволяють вирахувати розподіл температур та лінійне подовження на різних дільницях вздовж вимірювальної шкали 2, що важливо для врахування та компенсації теплових відхилень вимірювальної шкали 2. Вимірювальна шкала 2, зазвичай, виготовлена зі склотекстоліту або іншого неметалевого матеріалу з нанесенням поверхневого мідного рисунку. ТКЛР (температурний коефіцієнт лінійного розширення) вимірювальної шкали 2 значно відрізняється від ТКЛР штанги 1 та ТКЛР деталі, тому відліково-комп'ютерний блок 5 програмується з урахуванням цих відмінностей ТКЛР. Температура електричних елементів електронної плати відліково-комп'ютерного блока 5 погіршує режими функціонування електронної плати, тому спотворює результати вимірювань та їх математичної обробки в відліково-комп'ютерному блока 5. Використання датчиків 11 температури електричних елементів дозволяє зменшити негативний вплив температури на роботу відліково-комп'ютерного блока 5 та зменшити похибку вимірювань. Виконання штанги 1 у вигляді рейкової напрямної, а рухомої рамки 4 у вигляді каретки з підшипниками катання забезпечує нові можливості: - більш ніж у 10-25 рази зростає механічна стійкість рухомої рамки 4 в усіх напрямках відносно штанги 1, оскільки запропоновані рейкові напрямні утримують момент сили понад 1000 Нм; - зменшення на порядок сили тертя та більш м'який хід забезпечує заміна сухого ковзання на підшипникове катання рухомої рамки 4 по штанзі 1. Розміщення датчика перекосу 12 поміж рухомою рамкою 2 та штангою 1 забезпечує постійний контроль перекосу рухомої рамки 4 з рухомою губкою 6 та компенсацію похибки від цього перекосу за допомогою відліково-комп'ютерного блока 5. 2 UA 111194 U 5 10 15 20 25 30 35 40 45 Відліково-комп'ютерний блок 5 корисної моделі "Штангенциркуль адаптивний" виконує наступні функції: - визначає та обробляє показники переміщення рухомої рамки 4 відносно штанги 1 з вимірювальною шкалою 2; - приймає та обробляє за зазначеним алгоритмом показники, отримані від датчиків температури 7, 10,11 та датчика перекосу 12 з метою мінімізації похибки вимірювань; - усі інші функції, задекларовані в прототипі [4]. Вимірювання деталей за допомогою корисної моделі "Штангенциркуль адаптивний" виконуються наступним чином: 1) Включають відліково-комп'ютерний блок 5 штангенциркуля, при цьому активуються усі датчики (температури 7, 10, 11 та перекосу 12) та відображають поточні показники, які обробляються в відліково-комп'ютерному блоці 5. 2) В початковому положенні робочі контактні поверхні пружних термометрів 8 датчиків 7 температури деталі виступають відносно робочих поверхонь губок 3 та 6. 3) Деталь розміщують поміж губками 3 та 6 (або навпаки, губки 3, 6 штангенциркуля підводять до деталі). 4) При переміщенні рухомої рамки 4 по штанзі 1 наближають обидві губки 3 та 6 до деталі доти, поки деталь не досягне механічного теплового контакту з виступаючими пружними термометрами 8 датчика 7 температури деталі (при цьому за досить короткий час пружні термометри 7 визначають температуру деталі). 5) При подальшому переміщенні рухомої рамки 4 по штанзі 1 губки 3 та 6 ще більше наближаються одна до одної, до повного затискання деталі поміж собою (цей момент визначає початок операції вимірювання), при цьому пружні термометри 8 починають поглиблюватись у зазначені губки 3 та 6, продовжуючи тиснути на деталь та контролювати температуру деталі. 6) При використанні штангенциркуля, користувач бере рукою та нагріває окремі частини штангенциркуля (штангу 1, рамку 4, тощо), що веде до підвищення температури, про це засвідчують показники датчиків 10 температури окремих частин вимірювальної шкали 2. 7) Температура вимірювальної шкали також залежить від зовнішньої температурі, що засвідчують датчики 10 температури вимірювальної шкали 2. 8) В процесі вимірювань температуру нагріву відповідних електричних елементів контролюють датчики 11, показники яких дозволяють компенсувати негативний вплив тепла. 9) З моменту включення, датчик 12 постійно контролює показник перекосу рамки 2 відносно штанги 1 для компенсації цього перекосу за допомогою відліково-комп'ютерного блока 5 або вручну самим користувачем. 10) З самого початку процесу вимірювання відліково-комп'ютерний блок 5 постійно враховує показники усіх датчиків температури 7, 10, 11 та датчика перекосу 12 для компенсації негативного впливу на похибку вимірювань зазначених температур та перекосу рамки 4. Робота з корисною моделлю "Штангенциркуль адаптивний" не потребує особових знань та навичок, оскільки запропонована конструкція забезпечує декларований результат. Відповідно до формули корисної моделі "Штангенциркуль адаптивний", заявником був виготовлений експериментальний зразок адаптивного штангенциркуля діапазону 0-1000 мм з довжиною губок 500 мм, виконано порівняльний метрологічний аналіз прототипом [3], див. табл. Порівняння експериментального зразка корисної моделі "Штангенциркуль адаптивний" з існуючим аналогом, найбільш прецизійним великим штангенциркулем [3], повністю підтвердило переваги запропонованої корисної моделі у частині зменшення похибки вимірювань. Таблиця Порівняльні показники та функції штангенциркулів цифрових 1000 мм Довжина губки, мм Дискретність, мм Похибка вимірювань, мм Робочий діапазон, град. С Компенсація температур Компенсація перекосу Довжина губок >500 мм Значення показників та функцій Корисна модель Прототип Штангенциркуль мод. "Штангенциркуль адаптивний" 1851704 [3] 500 500 0,005 0,010 0,015 0,040 0…50 15…40 Так Ні Так Ні Так Ні 3 UA 111194 U 5 10 Проведений у таблиці порівняльний аналіз метрологічного контролю запропонованої корисної моделі "Штангенциркуль адаптивний" та найкращого аналогу штангенциркуля мод. 1851 704 фірми Ultra [3] підтверджує можливість практичної реалізації, безумовні метрологічні та технологічні переваги корисної моделі "Нутромір адаптивний". Запропонована корисна модель "Штангенциркуль адаптивний" суттєво розширює метрологічні та технологічні можливості великих штангенциркулів. Джерела інформації: 1. Mitutoyo. Catalog 2015-2017. - 668 p. 2. Sylvac. Catalog Edition. - P. 20-23. 3. Ultra. Catalog 2012-2013. - P. 11-21. 4. Патент № 99687. Штангенциркуль комп'ютерний / Крамаренко С.Б. - 2015 р. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 Штангенциркуль адаптивний, що містить штангу з вимірювальною шкалою та нерухомою губкою, на якій встановлена рухома рамка з рухомою губкою, відліково-комп’ютерний блок та датчик температури, який відрізняється тим, що має датчики температури, деталі якого мають пружні термометри, які через ізоляцію встановлені на губках, датчики температури шкали встановлені стаціонарно на вимірювальній шкалі, датчики температури електричних елементів встановлені у відліково-комп'ютерному блоці, також поміж штангою, у вигляді рейкової направляючої, та рухомою рамкою, у вигляді каретки з підшипниками катання, встановлено датчик перекосу, причому відліково-комп'ютерний блок виконаний з можливістю враховувати показники зазначених датчиків при обчисленні результатів вимірювань. 4 UA 111194 U Комп’ютерна верстка Т. Вахричева Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут інтелектуальної власності", вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01B 21/32, G01B 3/20
Мітки: штангенциркуль, адаптивний
Код посилання
<a href="https://ua.patents.su/7-111194-shtangencirkul-adaptivnijj.html" target="_blank" rel="follow" title="База патентів України">Штангенциркуль адаптивний</a>
Мікрометричний штангенциркуль
Номер патенту: 33178
Опубліковано: 10.06.2008
Автори: Стефанів Сергій Володимирович, Крук Володимир Володимирович, Івасечко Роман Романович, Фльонц Олег Володимирович
МПК: G01B 3/20
Мітки: штангенциркуль, мікрометричний
Формула / Реферат:
Мікрометричний штангенциркуль, який виконано у вигляді штанги з масштабною лінійкою, нерухомої і рухомої губок, рамки з шкалою ноніуса та стопорного гвинта, який відрізняється тим, що посередині висоти нерухомої губки виконано ступінчастий наскрізний отвір, в якому жорстко встановлено втулку, в яку жорстко встановлена ніжка мікрометра з індикатором і вимірювальною ніжкою, яка є в контакті з поверхнею оброблюваної деталі, а на штанзі...
Штангенциркуль
Номер патенту: 5449
Опубліковано: 15.03.2005
Автор: Гевко Ігор Богданович
МПК: G01B 3/20
Мітки: штангенциркуль
Формула / Реферат:
Штангенциркуль, який виконано у вигляді штанги з масштабною лінійкою і двома нерухомими губками, рамки з шкалою ноніуса і двох рухомих губок, глибиноміра, розміщеного з задньої сторони штанги в П-подібному пазу та стопорного гвинта, який відрізняється тим, що на вільному кінці глибиноміра, перпендикулярно до нього жорстко закріплена планка нутроміра таким чином, щоб її довжина була рівною ширині штанги, а при контакті рухомих губок між собою...
Штангенциркуль

Номер патенту: 71098
Опубліковано: 15.11.2004
Автори: Омельяненко Дар'я Василівна, Ливицький Іван Миколайович, Петровський Валерій Петрович
МПК: G01B 3/20
Мітки: штангенциркуль
Формула / Реферат:
1. Штангенциркуль, що містить штангу, рамку з основним ноніусом та додатковою шкалою, який відрізняється тим, що додаткова шкала виконана у вигляді зубчастої рейки з десятковими ноніусами на кожному зубці, яка розташована у рамці протилежно основному ноніусу, вимірювальні ребра зубців нахилені під гострим кутом до штрихів штанги, штрихи нанесені на всю ширину штанги, а крок зубців дорівнює кроку штрихів основного ноніуса рамки.2....
Штангенциркуль-трансформер
Номер патенту: 110139
Опубліковано: 26.09.2016
Автор: Крамаренко Сергій Борисович
МПК: G01B 3/20
Мітки: штангенциркуль-трансформер
Формула / Реферат:
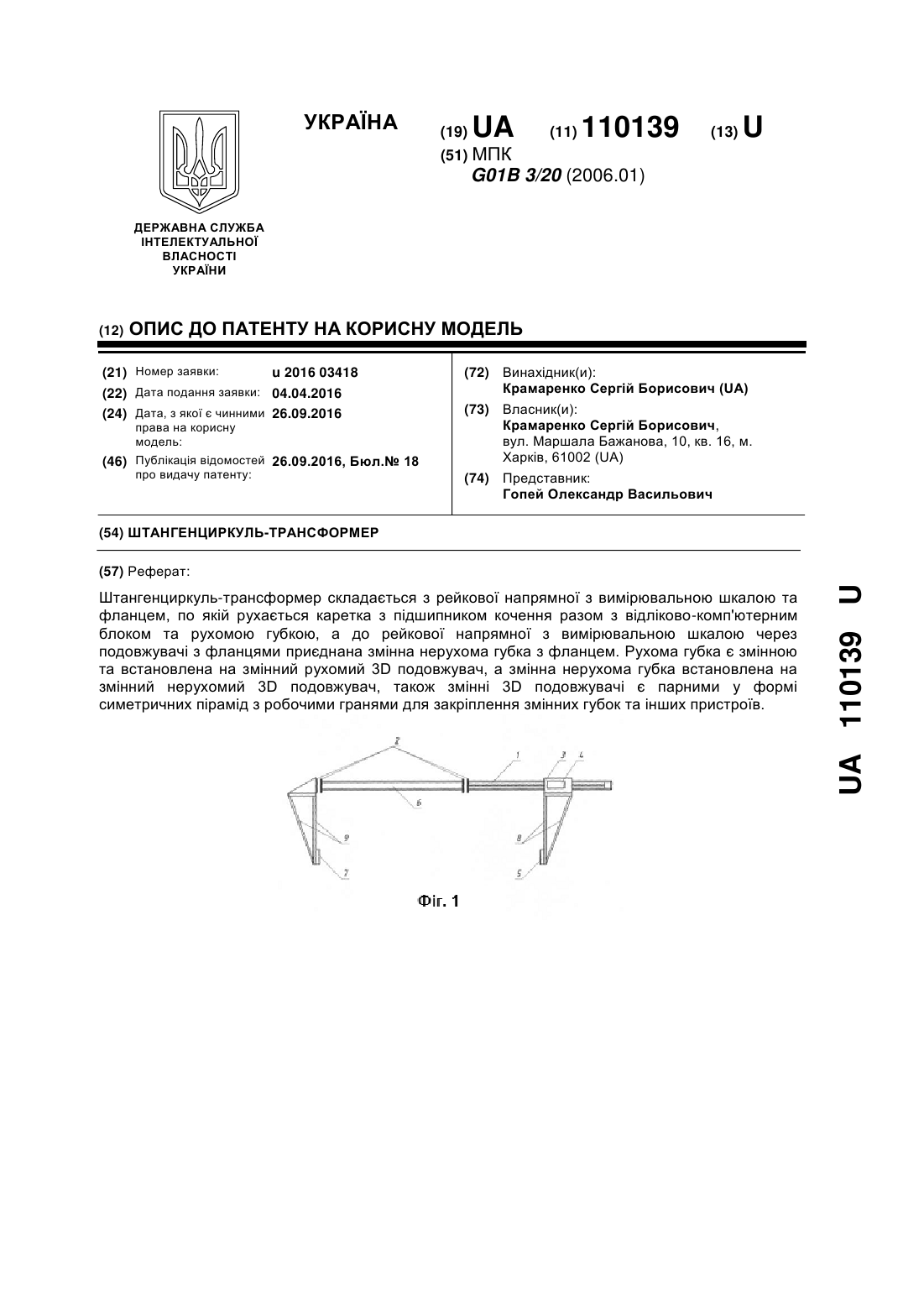
Штангенциркуль-трансформер, що складається з рейкової напрямної з вимірювальною шкалою та фланцем, по якій рухається каретка з підшипником кочення разом з відліково-комп'ютерним блоком та рухомою губкою, а до рейкової напрямної з вимірювальною шкалою через подовжувачі з фланцями приєднана змінна нерухома губка з фланцем, який відрізняється тим, що рухома губка є змінною та встановлена на змінний рухомий 3D подовжувач, а змінна нерухома губка...
Штангенциркуль тарований

Номер патенту: 100613
Опубліковано: 10.08.2015
Автор: Крамаренко Сергій Борисович
МПК: G01B 3/20
Мітки: штангенциркуль, тарований
Формула / Реферат:
Штангенциркуль тарований, що складається з вимірювальної штанги з нерухомою губкою, рухомої рамки разом з в відліковим пристроєм та з рухомою губкою, приєднаних до механізму точної подачі, який відрізняється тим, що поміж рухомою рамкою та механізмом точної подачі, розміщено пристрій регульованого тарованого зусилля вимірювань, який забезпечує оптимальне зусилля при вимірюваннях штангенциркулем.
Попередній патент: Мийний засіб
Наступний патент: Спосіб ідентифікації макрофагів еритробластного острівця червоного кісткового мозку на напівтонких зрізах
Випадковий патент: Засіб для лікування та профілактики урологічних захворювань у вигляді шипучих таблеток