Спосіб визначення нормальних висот
Номер патенту: 113310
Опубліковано: 10.01.2017
Автори: Коберник Інна Михайлівна, Малік Тетяна Миколаївна, Бурачек Всеволод Германович, Боровий Валентин Олександрович
Формула / Реферат
Спосіб визначення нормальних висот, оснований на методі астрономічного нівелювання, який відрізняється тим, що розвивають мережу робочих астрономічних пунктів і згущують її до кілометрових і субкілометрових інтервалів між астропунктами, на кожному робочому астропункті вимірюють астрономічні координати ![]() і
і ![]() астрономічним зенітним приладом в автоматичному режимі, а також геодезичні координати
астрономічним зенітним приладом в автоматичному режимі, а також геодезичні координати ![]() ,
, ![]() і
і ![]() за допомогою засобу GNSS і визначають на цих астропунктах відхилення прямовисних ліній, потім послідовно переходячи від пункту до пункту, починаючи від опорного і закінчуючи іншим опорним пунктом, враховуючи виміряні дані: відхилення прямовисної лінії вихідного астропункту і геодезичну висоту поверхні сферопа, яка проходить через відмітку репера вихідного астропункту, а також геодезичну висоту пункту, що визначається, обчислюють нормальну висоту кожного астропункту, що визначається, по формулі
за допомогою засобу GNSS і визначають на цих астропунктах відхилення прямовисних ліній, потім послідовно переходячи від пункту до пункту, починаючи від опорного і закінчуючи іншим опорним пунктом, враховуючи виміряні дані: відхилення прямовисної лінії вихідного астропункту і геодезичну висоту поверхні сферопа, яка проходить через відмітку репера вихідного астропункту, а також геодезичну висоту пункту, що визначається, обчислюють нормальну висоту кожного астропункту, що визначається, по формулі
![]() ,
,
де ![]() - нормальна висота пункту
- нормальна висота пункту ![]() ;
;
![]() - геодезична висота пункту
- геодезична висота пункту ![]() ;
;
![]() - аномалія висоти пункту
- аномалія висоти пункту ![]() ;
;
![]() - аномалія висоти вихідного пункту
- аномалія висоти вихідного пункту ![]() ;
;
![]() - зміна геодезичної висоти гравіметричної поверхні при переході від пункту
- зміна геодезичної висоти гравіметричної поверхні при переході від пункту ![]() до пункту
до пункту ![]() ;
;
при цьому вводять поправку за відхилення сферопу від концентричності відносно рівневого еліпсоїда (Нормальної Землі) при наявності різниці широт вихідного і визначального пунктів.
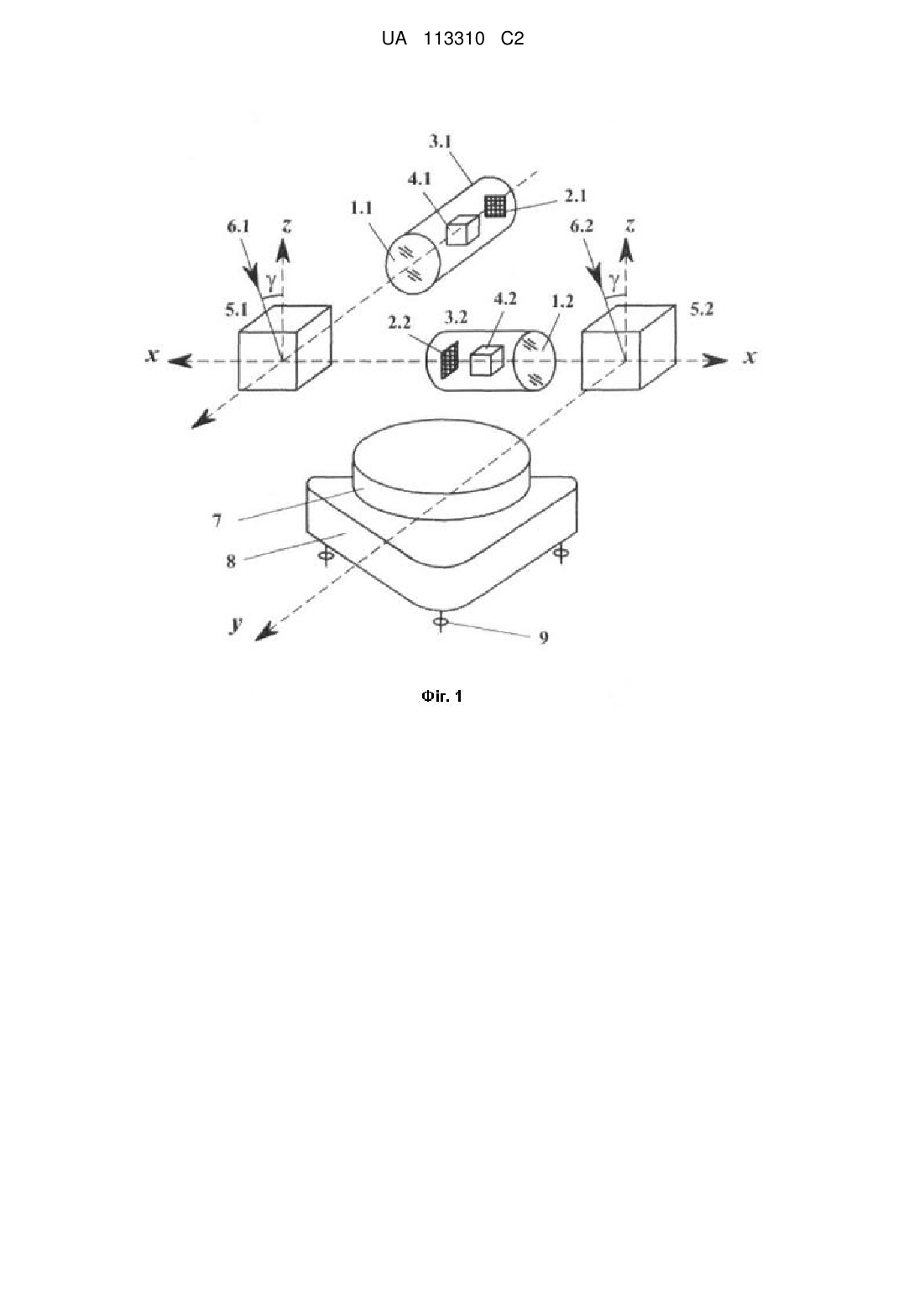
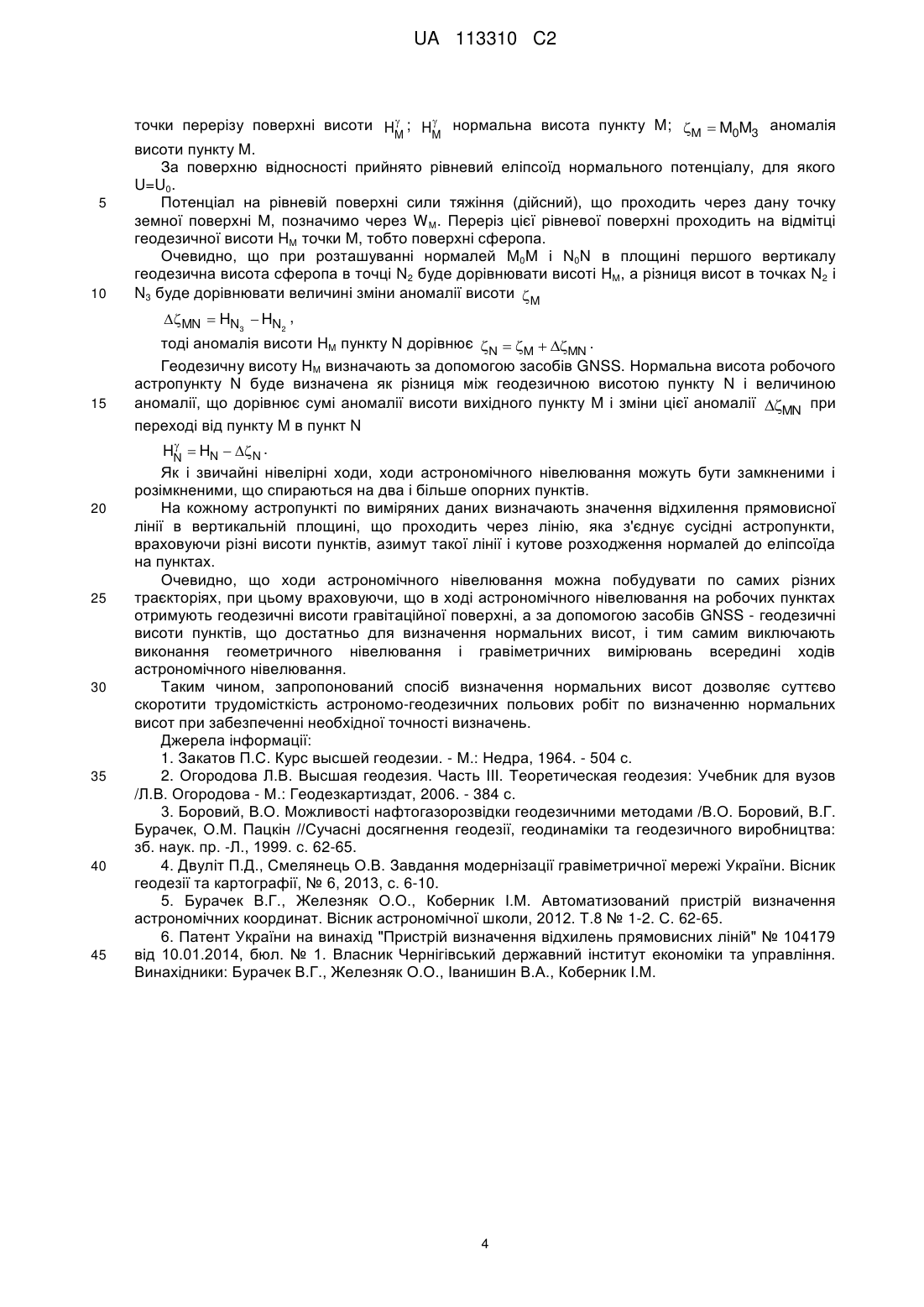
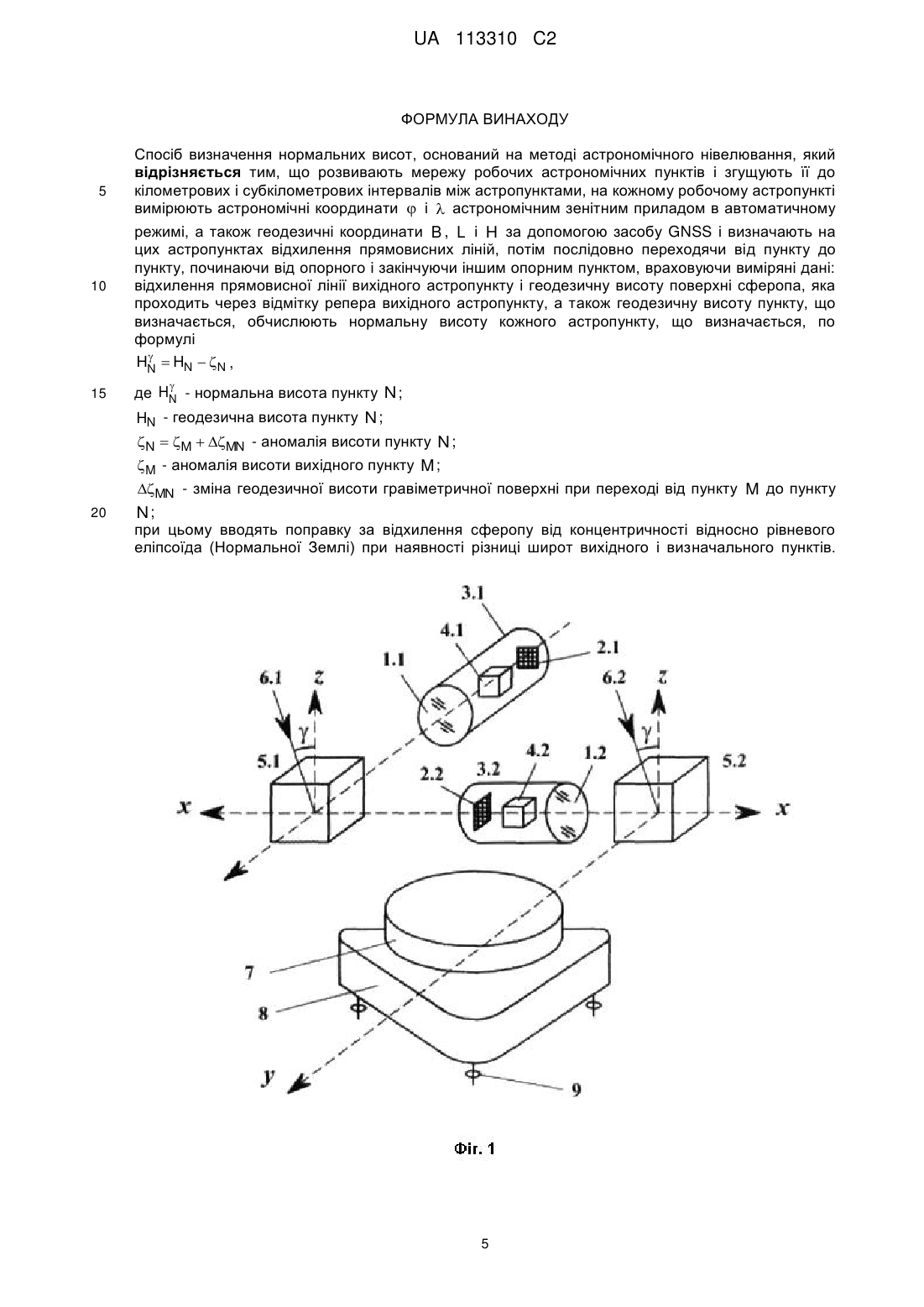
Текст
Реферат: Запропонований спосіб визначення нормальних висот належить до галузі вищої геодезії. Спосіб визначення нормальних висот оснований на методі астрономічного нівелювання, в якому розвивають мережу робочих астрономічних пунктів і згущують її до кілометрових і субкілометрових інтервалів між астропунктами. На кожному робочому астропункті вимірюють астрономічні координати і астрономічним зенітним приладом в автоматичному режимі, а також геодезичні координати B , L і H за допомогою засобу GNSS і визначають на цих астропунктах відхилення прямовисних ліній. Потім послідовно переходячи від пункту до пункту, починаючи від опорного і закінчуючи іншим опорним пунктом, враховуючи виміряні дані: відхилення прямовисної лінії вихідного астропункту і геодезичну висоту поверхні сферопа, яка проходить через відмітку репера вихідного астропункту, а також геодезичну висоту пункту, що визначається, обчислюють нормальну висоту кожного астропункту. UA 113310 C2 (12) UA 113310 C2 UA 113310 C2 5 10 15 20 Запропонований спосіб визначення нормальних висот належить до галузі вищої геодезії. Відомі способи визначення нормальних висот, наприклад в [1, 2] наведено способи астрономо-гравіметричного і астрономічного нівелювання. Спосіб астрономо-гравіметричного нівелювання (АГН) Молоденського [1] має високу точність, передбачає визначення висот квазігеоїда (ВКГ) над референц-еліпсоїдом з використанням астрономо-геодезичних відхилень виска і даних регіональної гравіметричної зйомки, дозволяє сумісно з геометричним нівелюванням визначати вертикальні координати точок земної поверхні в системі прийнятого референц-еліпсоїда, при цьому дані гравіметричної зйомки використовуються для врахування нелінійності вимірювань відхилень виска між астропунктами. Перевищення квазігеоїда (ПКГ) визначається як сума результату, що визначається звичайним астрономічним нівелюванням і гравіметричної поправки, яка обчислюється за гравіметричними даними. При цьому аномалії прискорення сили тяжіння (ПСТ) мають бути відомі в деякій області навколо кожної пари астропунктів [1]. Формула для розрахунку ПКГ між астропунктами A і B має вигляд: 30 35 40 45 50 55 R 2 0 gS S0 sin dd . (2) 4 0 0 Метод АГН дозволяє визначати астрономо-геодезичні висоти квазігеоїда лише в астропунктах, по яких передавались перевищення шляхом їх послідовного додавання, починаючи від вихідного пункту. При побудові детальних точних карт квазігеоїда на всю вивчувану територію виникає проблема інтерполяції точок різної щільності в залежності від аномальності району. Лінійна інтерполяція по вузлових точках з кроком 70-100 км призводить до вирівнювання висот, що зображуються на картах. В правій частині формули дві складові формули (1) мають різну структуру. Перша складова залежить лише від повільнозмінних з відстанню відхилень виска, обумовлених впливом аномалій середніх (і далеких) зон, а друга - враховує лише аномальність гравітаційного поля навколо кожної конкретної точки (в тому числі пунктів, між якими визначається перевищення), у висновку маючи набір висот квазігеоїда, шляхом простої інтерполяції формують карту [1]. Метод астрономічного нівелювання дозволяє шляхом інтерполювання складової астрономогеодезичних відхилень виска вздовж вибраної траси нівелювання визначати прирости висот квазігеоїда вздовж цієї траси. В методі астрономічного нівелювання відхилення 9 отримують від астрономічних і геодезичних вимірювань, тобто за формулою: ar cos A ar sin A , (3) де A0 25 0 M N M N l M N0 . (1) Величини першої складової правої частини представляють різниці астрономогеодезичних координат і відповідних гравіметричних відхилень виска, причому останні обчислюють по аномаліях колових областей радіусом навколо кожного астропункту за формулою Венінг-Мейнеса. Величини , в другій складовій отримуються по видозміненій формулі Стокса: ' 'ar B 0,171' ' H sin 2B , ' 'ar L cos B , A - азимут вертикальної площини, в якій розміщено даний відрізок лінії нівелювання [3]. В кожній точці ходу астрономічного нівелювання повинні бути відомі астрономічні і геодезичні координати. До недоліків способу АГН слід віднести: - погіршення результатів вимірювань квазігеоїда, внаслідок застосування інтерполяції, що призводить до погіршення точності; - застосування досить трудомісткого високоточного геометричного нівелювання; - застосування великого об'єму гравіметричних вимірювань; - недостатня точність визначення нормальних висот робочого пункту (20-30 мкГал абсолютне значення без врахування погіршення точності внаслідок застосування інтерполяції при обчисленні результатів). Замітимо, що точність сучасних польових гравіметрів досить висока (не гірше 15-20 мкГал), але для реалізації цієї точності в АГН необхідно виконати високоточне геометричне нівелювання, що в важкодоступній місцевості часто є досить складною і невирішеною проблемою. 1 UA 113310 C2 5 10 15 20 В [4] наведено аналіз стану і план-прогноз розвитку гравіметричної мережі України, де автори відмічають, що для того, щоб опорна геодезична мережа відповідала сучасним вимогам по гравіметричному забезпеченню задач геодезії, геології і геофізики, параметрам аналогічних мереж провідних європейських держав і вимогам Міжнародної геодезичної асоціації, вона повинна відповідати критеріям щільності пунктів, а також не перевищувати похибок комбінованого способу визначення прискорення вільного падіння, прийнятих в Європі. Як аналог, прийнятий за прототип, слід прийняти спосіб [1], який має загальні ознаки з пропонованим способом в частині застосування астрономічного нівелювання. Задачею винаходу є створення способу визначення нормальних висот, який би дозволив створити більш рентабельну і просту технологію геодезичних робіт. Поставлена задача вирішується за рахунок створення нового способу визначення нормальних висот, який оснований на методі астрономічного нівелювання, відрізняється тим, що розвивають мережу робочих астрономічних пунктів і згущують її до кілометрових і субкілометрових інтервалів між астропунктами, на кожному робочому астропункті вимірюють астрономічні координати і астрономічним зенітним приладом в автоматичному режимі, а також геодезичні координати B , L і H за допомогою засобу GNSS і визначають на цих астропунктах відхилення прямовисних ліній, потім послідовно переходячи від пункту до пункту, починаючи від опорного і скінчуючи іншим опорним пунктом, враховуючи виміряні дані: відхилення прямовисної лінії вихідного астропункту і геодезичну висоту поверхні сферопа, яка проходить через відмітку репера вихідного астропункту, а також геодезичну висоту пункту, що визначається, обчислюють нормальну висоту кожного астропункту, що визначається, по формулі HN HN N , 25 30 35 40 45 50 55 де H - нормальна висота пункту N; N HN - геодезична висота пункту N; N M MN - аномалія висоти пункту N; M - аномалія висоти вихідного пункту M; MN - зміна геодезичної висоти гравіметричної поверхні при переході від пункту M до пункту N; при цьому вводять поправку за відхилення сферопа від концентричності відносно рівневого еліпсоїда (Нормальної Землі) при наявності різниці широт вихідного і визначального пунктів. Технічним результатом винаходу є суттєве скорочення трудомісткості складних польових робіт за рахунок виключення високоточного геометричного нівелювання та гравіметричних вимірів. Запропонований спосіб визначення нормальних висот реалізується автоматизованим астрономічним приладом та приладом GNSS, за допомогою яких вимірюють астрономічні та геодезичні координати робочого астропункту. Схема даного астрономічного приладу представлена на фіг. 1 [5]. На фіг. 1 позначено [5, 6] конструктивні вузли приладу - двоканальної оптико-електронної цифрової камери, в тому числі: 1) об'єктиви каналів (1.1 - каналу довготи, 1.2 - широти); 2) багатоелементні фотоприймальні матриці (2.1 - довготи та 2.2 - широти відповідно); 3) корпус труби каналу (3.1 - каналу довготи та 3.2 - широти); 4) компенсатори горизонта (4.1 - каналу довготи та 4.2 - широти); 5) оптичні відхиляючі блоки (5.1 - каналу довготи та 5.2 - широти); 6) світловий потік від робочої зірки, який падає на об'єктиви 1.1 та 1.2 оптико-електронного приладу: 6.1 та 6.2 відповідно (візирні лінії); 7) електромеханічний блок повороту алідади приладу 1 на 180°; 8) трегер; 9) підйомні гвинти. Всі блоки розміщені в єдиному корпусі. Оптико-електронні канали приладу жорстко зв'язані між собою, їхні візирні осі розташовані в горизонтальній площині перпендикулярно одна до одної. Корпус приладу зі всіма блоками встановлений своєю вертикальною віссю на трегері, який в свою чергу розміщений та стабільно закріплений на стало закріпленому штативі чи астрономічному стовпі. До складу приладу також входить візирне пристосування для орієнтування приладу на місцевості та блок електроживлення. 2 UA 113310 C2 5 10 15 20 Таким чином, прилад складається з двох горизонтальних довгофокусних оптичних труб, жорстко з'єднаних в єдиному корпусі алідади з кутом між оптичними осями 90°, при цьому кожна з труб обладнана оптико-механічним компенсатором горизонта, оптичним блоком відхилення візирного променя в зону зеніту під кутом, близьким до 90°, фотоприймальною матрицею, електромеханічним блоком повороту алідади з датчиками кутів 0°, 180°, електронними блоками обробки інформації про широту та довготу пункту спостереження, управління та індикації [5]. Польові вимірювання включають в себе: 1. Підготовка даних про положення робочих зірок, вибір координат робочих астропунктів з врахуванням положення опорних астропунктів, облаштування місця встановлення астроприладу, його підготовка до вимірювань. 2. Автоматичне вимірювання положення робочої зірки відносно вертикалі одночасно в площинах меридіану та першого вертикалу (тобто астрономічних координат зірки). 3. Одночасно з вимірюванням за п. 2 виконують вимірювання геодезичних координат, в тому числі геодезичної висоти астропункту. 4. За формулою (3) визначають відхилення прямовисної лінії та відповідно в площині меридіану та першого вертикала. На фіг. 2 показано схему передачі геодезичної висоти гравітаційної поверхні від вихідного астропункту M на суміжний астропункт N. При цьому точка астропункту N не зображена, - вона знаходиться на лінії проекції нормалі до еліпсоїда в точці N0. M0 і N0 - проекції даних астропунктів на поверхню відносності, mm і nn' - прямовисні лінії, що виміряні на астропунктах ' M і N. На фіг. 2 показано розміщення астропунктів M і N в площині першого вертикалу. Точка C вершина описаного кута на відрізку лінії кола M - Hg , яка в точках M і Hg перпендикулярна N N 25 30 35 40 45 50 відповідно до прямовисних ліній mm' i nn' ; CH1 - продовження лінії МС, а МН2 - лінія, яка g паралельна лінії CH N і перпендикулярна прямовисній лінії nn' . При обробці даних астронівелірного ходу для невеликих відстаней (~1 км) між астропунктами можна, нехтуючи похибками другого і вище порядків, апроксимувати профіль гравітаційної поверхні відрізками кола більшого радіуса, перпендикулярними до прямовисних ліній в точках їх перетину на астропунктах. Зміна геодезичної висоти гравітаційної поверхні (рівнева поверхня з потенціалом WA C ), наприклад, в площині першого вертикала від вихідного астропункту до визначального пункту, можна розрахувати за формулою MN Stg , (4) 2 де N M N M - різниця складових відхилення прямовисної лінії (ВПЛ) для пунктів N і M; S - відстань між пунктами N і M; - кутове розходження нормалей до еліпсоїда в пунктах N i M . Геодезична висота гравітаційної поверхні, що проходить в т. M на відмітці HM - в пункті N буде знаходитися на відмітці HM MN , оскільки в даному випадку HM задає висоту сферопа, при цьому MN є відхилення висоти гравітаційної поверхні від сферопа. При наявності різниці широт між пунктами M і N необхідно в значення 2 1 в формулі (3) вводити поправку за зміну висоти сферопа різниці широт пунктів M і N, а також відповідні складові відхилень прямовисної лінії в вертикальній площині між астропунктами. Таким чином, при послідовному визначенні перевищень по астронівелірному ходу між опорними астрономо-геодезичними пунктами і їх врівноваженні для кожного астропункту можна отримати досить точне значення висоти гравітаційної поверхні з геопотенціалом вихідного пункту, що, враховуючи планові координати пунктів мережі астронівелювання, дозволяє побудувати в просторі відносно еліпсоїда точну гравітаційну поверхню. Визначивши величину MN , перейдемо до визначення нормальної висоти астропункту N. g На фіг. 3 представлена схема для визначення нормальної висоти HN , астропункту N. M і N точки суміжних робочих астропунктів на земній поверхні; M вихідний, а N визначальний астропункти. M0 і N0 проекції пунктів M і N на поверхню відносності (рівневий еліпсоїд), M1, і N1 3 UA 113310 C2 5 10 точки перерізу поверхні висоти HM ; HM нормальна висота пункту M; M M0M3 аномалія висоти пункту M. За поверхню відносності прийнято рівневий еліпсоїд нормального потенціалу, для якого U=U0. Потенціал на рівневій поверхні сили тяжіння (дійсний), що проходить через дану точку земної поверхні M, позначимо через W M. Переріз цієї рівневої поверхні проходить на відмітці геодезичної висоти HM точки M, тобто поверхні сферопа. Очевидно, що при розташуванні нормалей M0M і N0N в площині першого вертикалу геодезична висота сферопа в точці N2 буде дорівнювати висоті HM, а різниця висот в точках N2 і N3 буде дорівнювати величині зміни аномалії висоти M MN HN HN , 3 15 20 25 30 35 40 45 2 тоді аномалія висоти HM пункту N дорівнює N M MN . Геодезичну висоту HM визначають за допомогою засобів GNSS. Нормальна висота робочого астропункту N буде визначена як різниця між геодезичною висотою пункту N і величиною аномалії, що дорівнює сумі аномалії висоти вихідного пункту M і зміни цієї аномалії MN при переході від пункту M в пункт N HN HN N . Як і звичайні нівелірні ходи, ходи астрономічного нівелювання можуть бути замкненими і розімкненими, що спираються на два і більше опорних пунктів. На кожному астропункті по виміряних даних визначають значення відхилення прямовисної лінії в вертикальній площині, що проходить через лінію, яка з'єднує сусідні астропункти, враховуючи різні висоти пунктів, азимут такої лінії і кутове розходження нормалей до еліпсоїда на пунктах. Очевидно, що ходи астрономічного нівелювання можна побудувати по самих різних траєкторіях, при цьому враховуючи, що в ході астрономічного нівелювання на робочих пунктах отримують геодезичні висоти гравітаційної поверхні, а за допомогою засобів GNSS - геодезичні висоти пунктів, що достатньо для визначення нормальних висот, і тим самим виключають виконання геометричного нівелювання і гравіметричних вимірювань всередині ходів астрономічного нівелювання. Таким чином, запропонований спосіб визначення нормальних висот дозволяє суттєво скоротити трудомісткість астрономо-геодезичних польових робіт по визначенню нормальних висот при забезпеченні необхідної точності визначень. Джерела інформації: 1. Закатов П.С. Курс высшей геодезии. - М.: Недра, 1964. - 504 с. 2. Огородова Л.В. Высшая геодезия. Часть III. Теоретическая геодезия: Учебник для вузов /Л.В. Огородова - М.: Геодезкартиздат, 2006. - 384 с. 3. Боровий, В.О. Можливості нафтогазорозвідки геодезичними методами /В.О. Боровий, В.Г. Бурачек, О.М. Пацкін //Сучасні досягнення геодезії, геодинаміки та геодезичного виробництва: зб. наук. пр. -Л., 1999. с. 62-65. 4. Двуліт П.Д., Смелянець О.В. Завдання модернізації гравіметричної мережі України. Вісник геодезії та картографії, № 6, 2013, с. 6-10. 5. Бурачек В.Г., Железняк О.О., Коберник І.М. Автоматизований пристрій визначення астрономічних координат. Вісник астрономічної школи, 2012. Т.8 № 1-2. С. 62-65. 6. Патент України на винахід "Пристрій визначення відхилень прямовисних ліній" № 104179 від 10.01.2014, бюл. № 1. Власник Чернігівський державний інститут економіки та управління. Винахідники: Бурачек В.Г., Железняк О.О., Іванишин В.А., Коберник І.М. 4 UA 113310 C2 ФОРМУЛА ВИНАХОДУ 5 10 Спосіб визначення нормальних висот, оснований на методі астрономічного нівелювання, який відрізняється тим, що розвивають мережу робочих астрономічних пунктів і згущують її до кілометрових і субкілометрових інтервалів між астропунктами, на кожному робочому астропункті вимірюють астрономічні координати і астрономічним зенітним приладом в автоматичному режимі, а також геодезичні координати B , L і H за допомогою засобу GNSS і визначають на цих астропунктах відхилення прямовисних ліній, потім послідовно переходячи від пункту до пункту, починаючи від опорного і закінчуючи іншим опорним пунктом, враховуючи виміряні дані: відхилення прямовисної лінії вихідного астропункту і геодезичну висоту поверхні сферопа, яка проходить через відмітку репера вихідного астропункту, а також геодезичну висоту пункту, що визначається, обчислюють нормальну висоту кожного астропункту, що визначається, по формулі HN HN N , 15 20 де HN - нормальна висота пункту N ; HN - геодезична висота пункту N ; N M MN - аномалія висоти пункту N ; M - аномалія висоти вихідного пункту M ; MN - зміна геодезичної висоти гравіметричної поверхні при переході від пункту M до пункту N; при цьому вводять поправку за відхилення сферопу від концентричності відносно рівневого еліпсоїда (Нормальної Землі) при наявності різниці широт вихідного і визначального пунктів. 5 UA 113310 C2 Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюBurachek Vsevolod Hermanovych, Borovyi Valentyn Oleksandrovych
Автори російськоюБурачек Всеволод Германович, Боровый Валентин Александрович
МПК / Мітки
МПК: G01C 5/00
Мітки: спосіб, визначення, нормальних, висот
Код посилання
<a href="https://ua.patents.su/8-113310-sposib-viznachennya-normalnikh-visot.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення нормальних висот</a>
Спосіб вимірювання малих висот польоту над землею та пристрій для його реалізації
Номер патенту: 48476
Опубліковано: 15.08.2002
Автори: Порицький Сергій Леонідович, Бахвалов Валентин Борисович
МПК: G01S 13/00, G01S 13/24
Мітки: реалізації, землею, спосіб, пристрій, польоту, висот, малих, вимірювання
Формула / Реферат:
1. Спосіб вимірювання малих висот польоту над землею, згідно з яким випромінюють з борту вниз неперервний сигнал зондування за допомогою бортової передавальної антени, приймають відбитий від землі сигнал бортовою приймальною антеною і фазовим вимірювачем вимірюють зсув фаз, який відрізняється тім, що випромінюють неперервний синусоїдальний сигнал постійної амплітуди на частоті короткохвильового або середньохвильового діапазону, приймають...
Спосіб захисту існуючих будівель і споруд від надмірного снігового навантаження біля перепадів висот
Номер патенту: 51596
Опубліковано: 26.07.2010
Автори: Пічугін Сергій Федорович, Семко Олександр Володимирович, Дрижирук Юрій Васильович
МПК: E04B 1/00
Мітки: надмірного, перепадів, біля, спосіб, навантаження, висот, снігового, захисту, будівель, існуючих, споруд
Формула / Реферат:
Спосіб захисту існуючих будівель і споруд від надмірного снігового навантаження біля перепадів висот, в якому за рахунок снігозахисних конструкцій (3) забезпечують захист дахів будинків від надмірного скупчення снігу в місцях перепадів висот.
Спосіб визначення в’язкості руйнування к1с пластичних сталей при нормальних умовах
Номер патенту: 60464
Опубліковано: 15.10.2003
Автори: Камінський Анатолій Олексійович, Галатенко Григорій Васильович
МПК: G01N 3/00
Мітки: нормальних, визначення, спосіб, руйнування, пластичних, сталей, в'язкості, к1с, умовах
Формула / Реферат:
Спосіб визначення в'язкості руйнування К1С пластичних сталей при нормальних умовах по границі текучості сталей і в'язкості руйнування К1С при низькій температурі, який відрізняється тим, що по границі текучості пластичних сталей визначають низьку температуру і в'язкість руйнування К1С при цій температурі, а потім перераховують КІС для нормальних умов за формулою К1С =...
Спосіб визначення прогностичних нормальних індивідуальних параметрів внутрішніх органів людини
Номер патенту: 35740
Опубліковано: 16.04.2001
Автори: Шапаренко Георгій Павлович, Гумінський Юрій Йосипович, Шапаренко Павло Пилипович
МПК: A61B 5/107
Мітки: прогностичних, параметрів, органів, спосіб, визначення, нормальних, людини, внутрішніх, індивідуальних
Формула / Реферат:
Спосіб визначення прогностичних нормальних індивідуальних параметрів внутрішніх органів людини, що включає проведення вимірювань соматометричних ознак тіла людини з подальшим обчисленням за допомогою регресійних та математичних моделей, який відрізняється тим, що моделювання розмірів внутрішніх органів проводять на основі декількох багатокомпонентних соматометричних ознак, що більш достовірно характеризують компонентні складові частини тіла...
Спосіб визначення висотного положення точок геодезичної кінематичної мережі
Номер патенту: 47168
Опубліковано: 17.06.2002
Автор: Третяк Корнилій Романович
МПК: G01C 5/00
Мітки: кінематичної, спосіб, визначення, геодезичної, точок, мережі, висотного, положення
Формула / Реферат:
Спосіб визначення висотного положення точок геодезичної кінематичної мережі, який заключається у проведенні циклів спостережень висотного положення точок геодезичної кінематичної мережі, кожний з яких включає встановлення приладів для нівелювання на точках мережі і у технологічно необхідних місцях та вимірювання перевищень між точками з наступним урівноваженням висот точок, який відрізняється тим, що при урівноваженні висот точок мережі...