Самохідний модуль для дробоструминного очищення
Номер патенту: 114152
Опубліковано: 25.04.2017
Автори: Шулянський Григорій Анатолійович, Черняк Роман Євгенійович, Чернявський Анатолій Миколайович, Горик Олексій Володимирович, Ковальчук Станіслав Богданович, Брикун Олександр Миколайович
Формула / Реферат
1. Самохідний маніпулятор (СМ) для дробоструминного очищення внутрішньої поверхні порожнистих виробів типу тіл обертання, наприклад суцільнозварних сталевих корпусів хімічних, харчових, біотехнічних та інших апаратів, що складається з циліндричної обичайки і торцевих днищ, одне з яких має люк, і містить механізм пересування дробоструминного сопла, систему керування і тримач дробоструминного сопла, який відрізняється тим, що механізм пересування дробоструминного сопла виконаний у вигляді візка з гусеничним рушієм, система керування виконана у вигляді встановлених в корпусі CM задавальних механізмів: орієнтування положення СМ по вертикалі на стінці оброблюваного корпусу апарата, переміщення CM вздовж твірної кривої корпусу апарата, тримач дробоструминного сопла доповнений механізмом осцилюючого руху.
2. Самохідний маніпулятор за п. 1, який відрізняється тим, що на траки гусеничного рушія самохідного візка рівномірно встановлені магнітні пластини.
3. Самохідний маніпулятор за п. 1, який відрізняється тим, що кожен задавальний механізм виконаний у вигляді сполученого з імпульсним круговим датчиком шарнірно встановленого валика, до якого на жорсткій струні підвішений вантаж, здатний провертати валик при відхиленні струни від вертикалі, що приводить до зміни керуючого сигналу кругового датчика, який впливає на привід самохідного маніпулятора.
4. Самохідний маніпулятор за п. 1, який відрізняється тим, що осцилюючий механізм тримача дробоструминного сопла виконаний у вигляді встановленого на опорах циліндричного стержня, який за допомогою механічної передачі сполучений з магнітним осердям, що входить у дві симетрично встановлені обмотки (котушки) соленоїда.
Текст
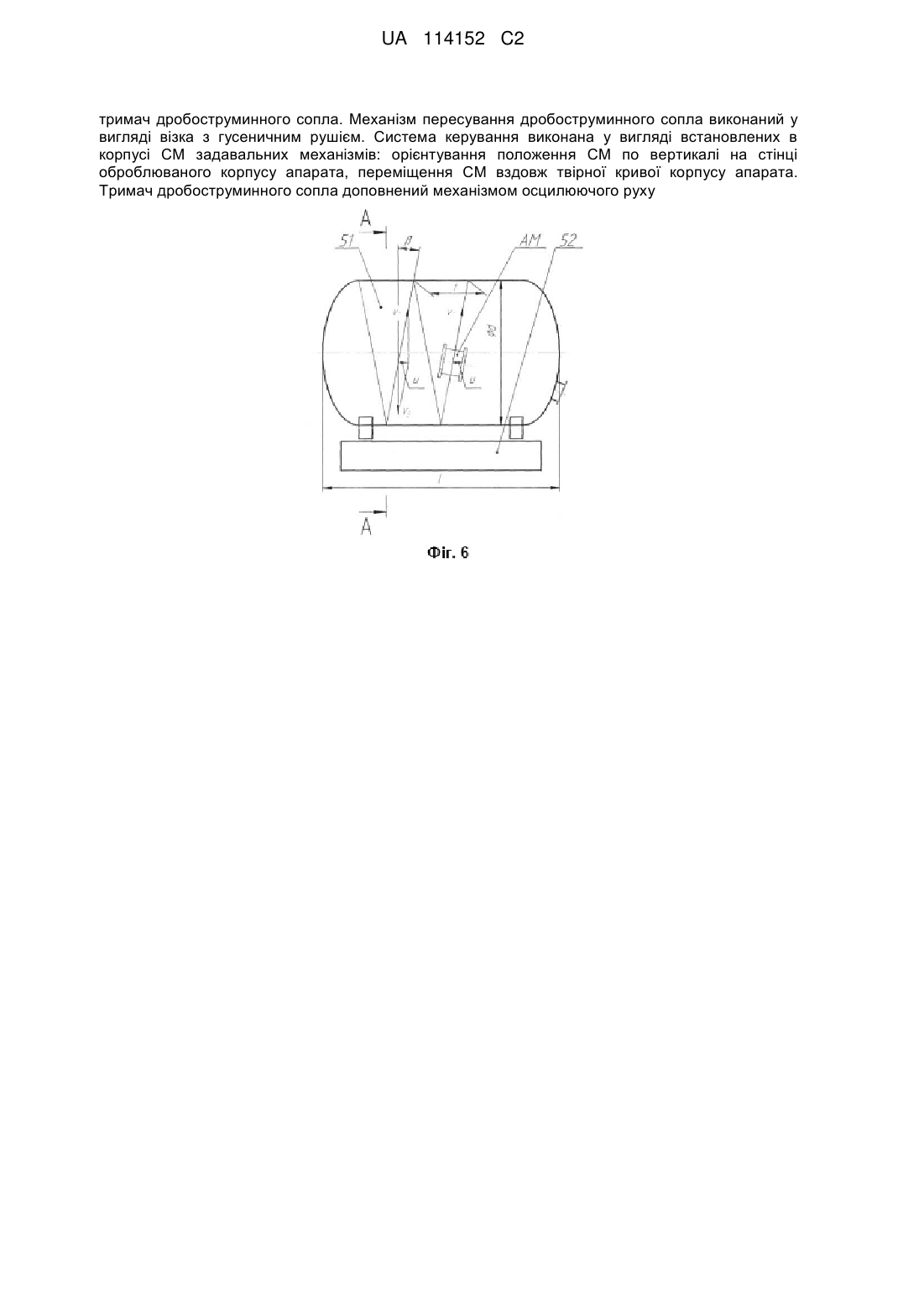
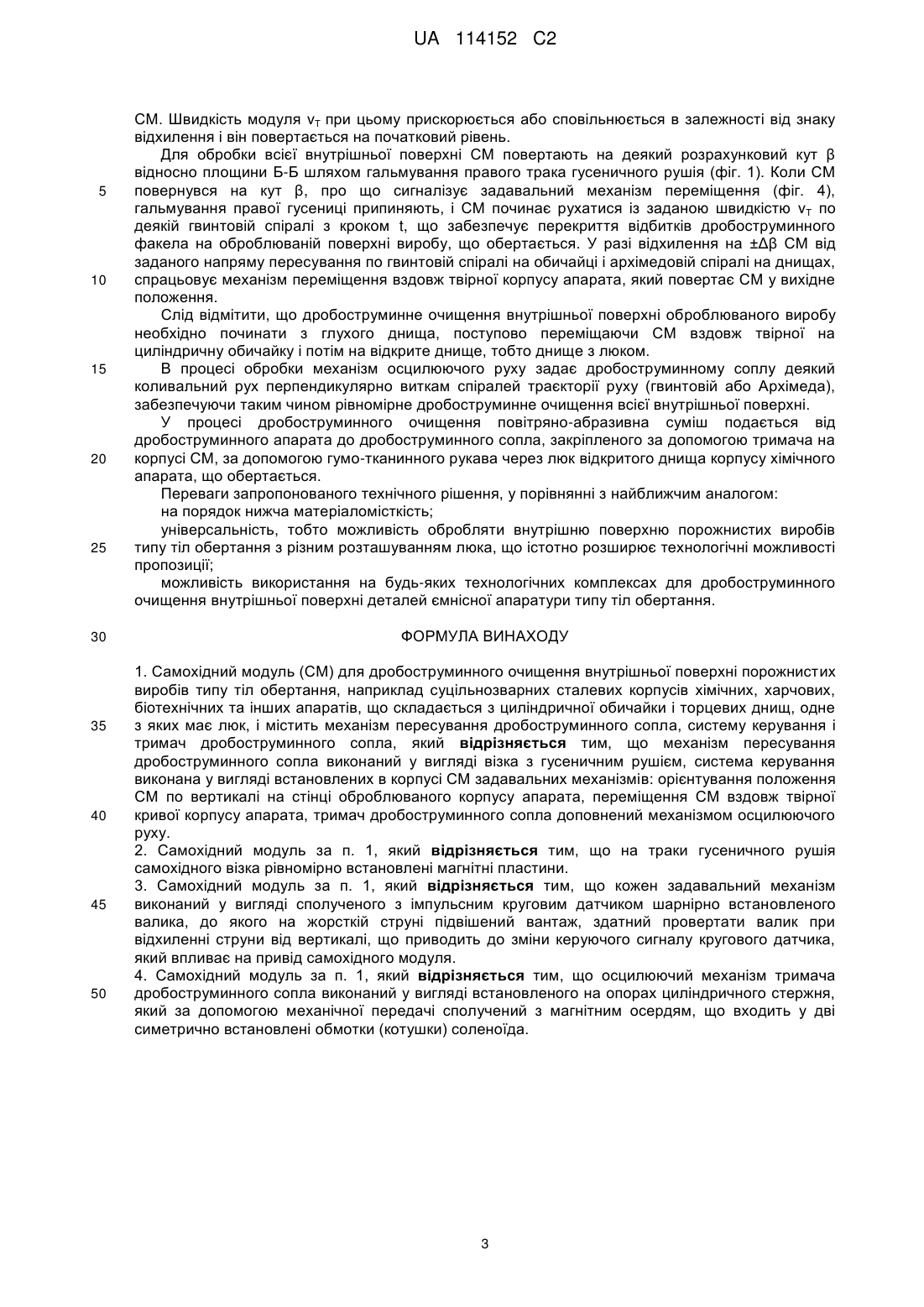
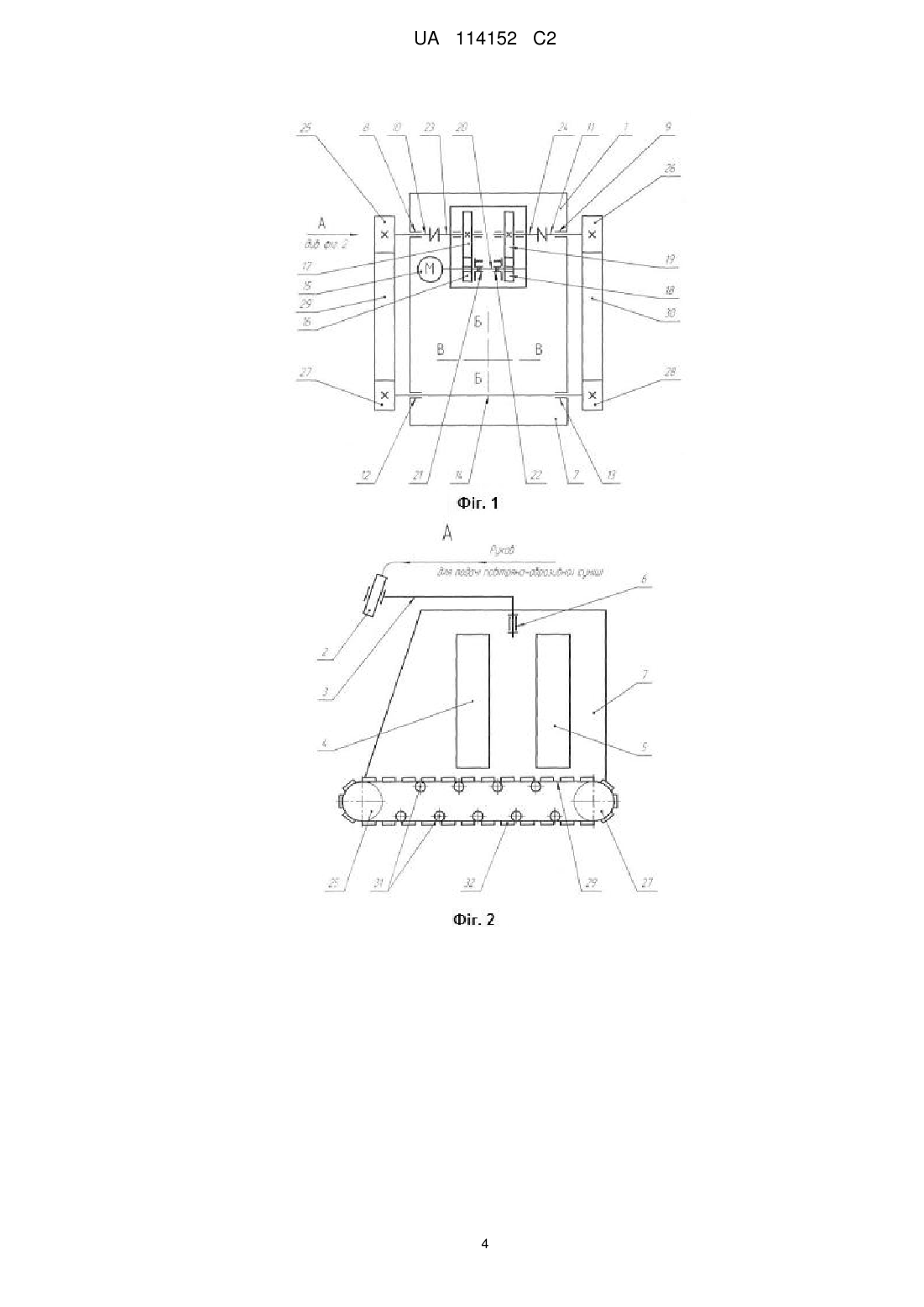
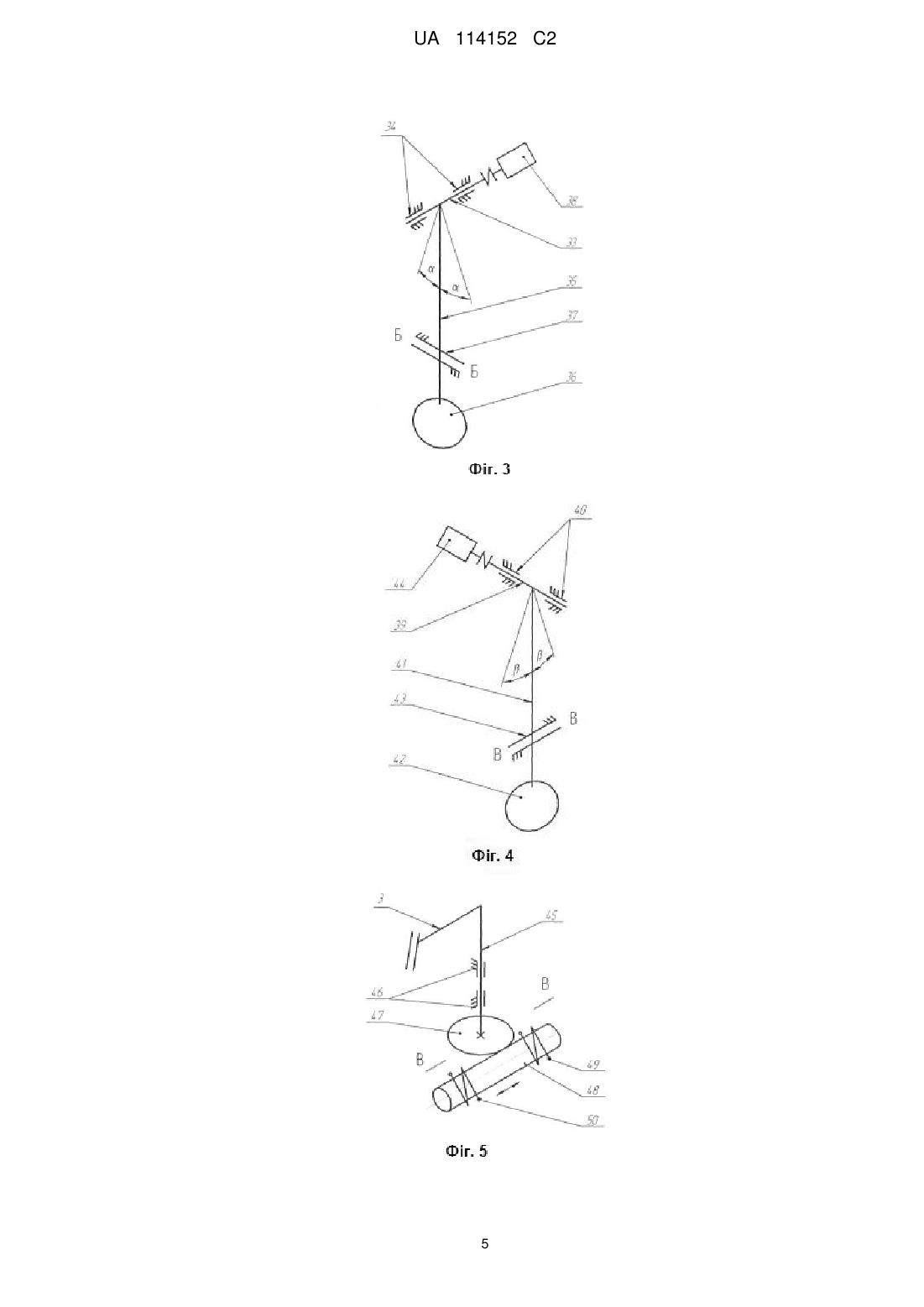
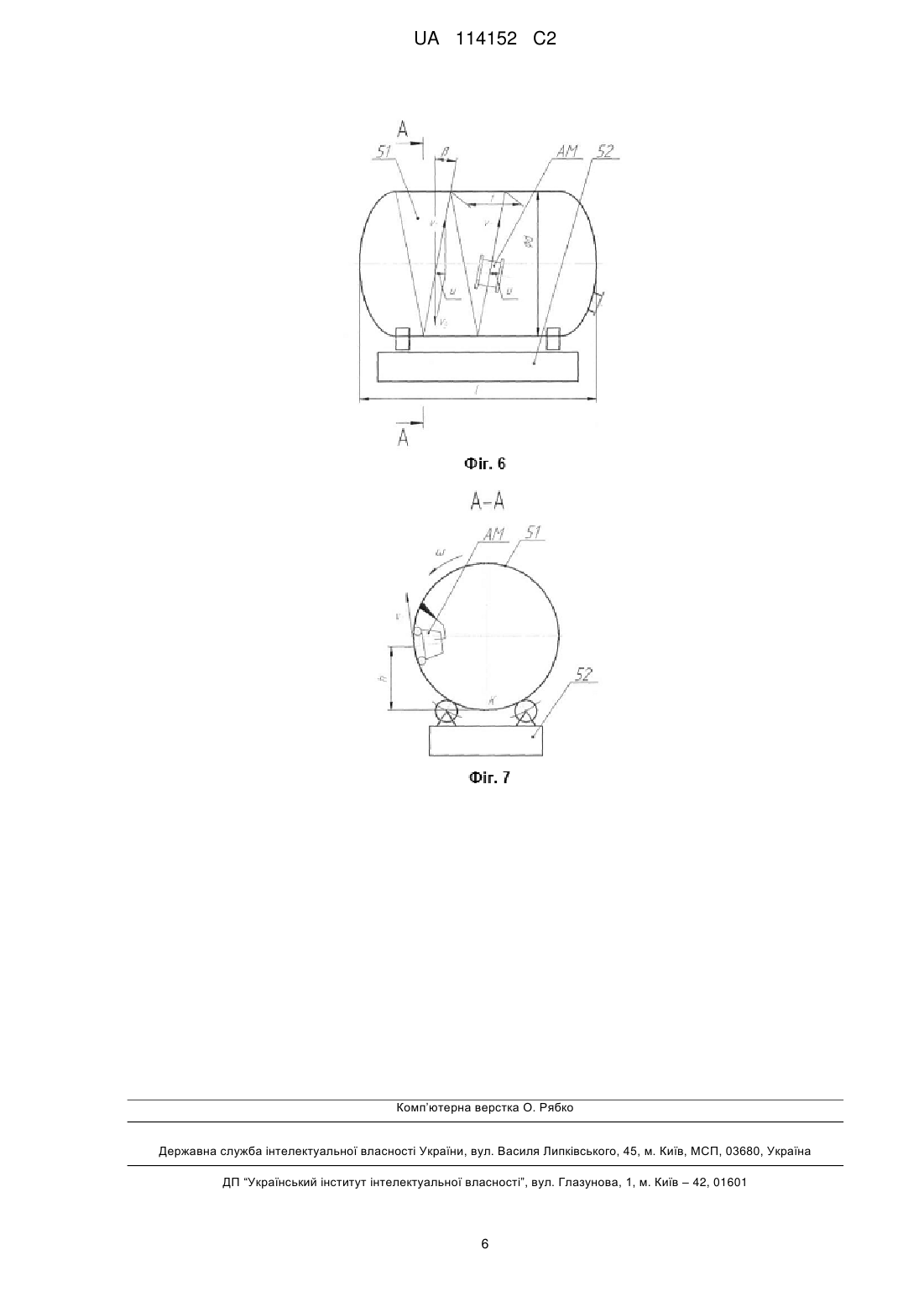
Реферат: Самохідний модуль (СМ) для дробоструминного очищення внутрішньої поверхні порожнистих виробів типу тіл обертання, наприклад суцільнозварних сталевих корпусів хімічних, харчових, біотехнічних та інших апаратів, складається з циліндричної обичайки і торцевих днищ, одне з яких має люк, і містить механізм пересування дробоструминного сопла, систему керування і UA 114152 C2 (12) UA 114152 C2 тримач дробоструминного сопла. Механізм пересування дробоструминного сопла виконаний у вигляді візка з гусеничним рушієм. Система керування виконана у вигляді встановлених в корпусі CM задавальних механізмів: орієнтування положення СМ по вертикалі на стінці оброблюваного корпусу апарата, переміщення CM вздовж твірної кривої корпусу апарата. Тримач дробоструминного сопла доповнений механізмом осцилюючого руху UA 114152 C2 5 10 15 20 25 30 35 40 45 50 55 Самохідний модуль (СМ) для дробоструминного очищення відноситься до галузі машинобудування, яка займається виготовленням ємнісної апаратури (реакторів, збірників, фільтрів) для хімічної, харчової промисловості та сільського господарства, а саме до пристроїв для очищення внутрішньої поверхні порожнистих виробів типу тіл обертання, наприклад, суцільнозварних сталевих корпусів хімічних, харчових, біотехнічних та інших апаратів, що складаються з циліндричної обичайки і торцевих днищ, одне з яких має люк. Відомі автоматичні маніпулятори (AM) для дробоструминного очищення внутрішньої поверхні суцільнозварних корпусів хімічних апаратів, які складені з циліндричної обичайки з привареними еліптичними днищами, одне з яких має центральний люк. AM містить самохідний візок на платформі якого встановлена стійка, що несе горизонтальну штангу з механічною рукою [Автоматизация струйной обработки корпусов химических аппаратов /А.Н. Чернявский, Ю.А. Наговский //Химическое и нефтяное машиностроение - М: 1987. - № 1]. Такі маніпулятори є вельми громіздкими і здатні обробляти внутрішню поверхню тільки суцільнозварних корпусів, складених з циліндричної обичайки і еліптичних днищ, в одному з яких є центральний люк. Відомий також AM дробоструминного очищення [Патент України на винахід №105279. Маніпулятор дробоструминного очищення / О.В. Горик, A.M. Чернявский, А.А. Ландар, Г.А. Шулянский // Заяв № а 2012 10574, 07.09.2012. -Публ. 25.04.2014, Бюл. №8]. який взятий нами за найближчий аналог. Цей маніпулятор містить механізм пересування дробоструминного сопла. Він здатний обробляти також тільки внутрішню поверхню суцільнозварних корпусів, складених з циліндричної обичайки з торцевими днищами різної конфігурації. Проте і ця конструкція маніпулятора є достатньо матеріаломісткою і передбачає наявність на одному із днищ корпусу апарата центрального люка. Запропоноване технічне рішення на конструкцію самохідного модуля дозволяє істотно зменшити матеріаломісткість і розширити технологічні можливості, оскільки дозволяє обробляти корпуси апаратів, у яких в одному з торцевих днищ передбачається люк в довільному місці. Поставлена задача вирішується тим, що механізм пересування дробоструминного сопла самохідного модуля виконаний у вигляді візка з гусеничним рушієм. Система управління CM передбачена у вигляді встановлених в корпусі візка задавальних механізмів: орієнтування положення СМ на стінці корпусу апарата по вертикалі і переміщення CM вздовж твірної корпусу апарата, тобто по горизонталі. Тримач дробоструминного сопла доповнений механізмом осцилюючого руху. На траки гусеничного рушія рівномірно встановлені магнітні пластини. Кожен задавальний механізм виконаний у вигляді, сполученого з імпульсним круговим датчиком, шарнірного валика, до якого на жорсткій струні підвішений вантаж, здатний провертати валик при відхиленні струни від початкового положення, що призводить до зміни керуючого сигналу кругового датчика, який впливає на привід самохідного модуля. Осцилюючий механізм виконаний у вигляді встановленого в опорах циліндричного стержня, який за допомогою механічної передачі сполучений з магнітним осердям, що входить у дві симетрично встановлені обмотки (котушки) соленоїда. Викладена суть запропонованого технічного рішення пояснюється схематичними кресленнями, де зображено: на фіг. 1 - самохідний модуль. Вигляд зверху (без верхньої частини корпусу поз. 7); на фіг. 2 - самохідний модуль. Вигляд А по фіг. 1; на фіг. 3 - задавальний механізм (поз. 4 на фіг. 2) орієнтування вертикального положення самохідного модуля на стінці корпусу апарата, що обертається (оброблюваного виробу); на фіг. 4 - задавальний механізм (поз. 5 на фіг. 2) переміщення самохідного модуля вздовж твірної кривої корпусу апарата (оброблюваного виробу); на фіг. 5 - механізм осцилюючого руху (поз. 6 на фіг. 2) тримача 3 дробоструминного сопла 2; на фіг. 6 - технологічна схема дробоструминного очищення (головний вигляд); на фіг. 7 - технологічна схема дробоструминного очищення (переріз А-А фіг. 6). Самохідний модуль (фіг. 1, 2) складається із візка 1 з гусеничним рушієм, який є механізмом пересування дробоструминного сопла 2 прикріпленого до тримача 3, системи управління, що складається з двох задавальних механізмів: орієнтування положення по вертикалі 4 самохідного модуля на стінці корпусу апарата, що обертається, і механізму переміщення 5 самохідного маніпулятора вздовж твірної корпусу апарата (оброблюваного виробу), і механізму осцилюючого руху 6 тримача 3 дробоструминного сопла. Візок має корпус 7, в порожнині якого на опорах 8 і 9 розміщені ведучі вали 10 та 11 і на опорах 12 та 13 ведений вал 14. Ведучі вали 10 і 11 отримують обертальний рух від двигуна 15 через циліндричний редуктор, який утворюють паралельно встановлені зубчаті передачі 16-17 і 1 UA 114152 C2 5 10 15 20 25 30 35 40 45 50 55 18-19. Шестерні 16 і 18 вільно розміщені на валу 20 і можуть з'єднуватися з ним за допомогою керованих муфт 21 і 22. Колеса 17 і 19 закріплені на валах 23 і 24 відповідно. Гусеничний рушій візка складається з ведучих коліс 25 і 26, відповідно встановлених на валах 10 і 11, і ведених коліс 27 і 28, встановлених на валу 14, на які, тобто на колеса, одягнені траки 29 і 30. Всередині траків встановлені опорні ролики 31, які підтримують траки. На траках закріплені магнітні пластини 32. Ведений вал 14 має натяжний пристрій, який на фіг. 1 не показаний. Задавальний механізм (фіг. 3) орієнтування положення по вертикалі СМ на стінці оброблюваного виробу, що обертається, виконаний у вигляді валика 33, встановленого вільно на опорах 34. До валика прикріплена жорстка струна 35 з вантажем 36. Струна з вантажем може коливатися в площині Б-Б (фіг. 1). Для умови стійкого коливання струни в заданій площині передбачені направляючі 37. До валика 33 приєднаний імпульсний круговий датчик 38. Коли CM відхиляється від робочого положення по вертикалі, струна 35 під дією вантажу 36 відхиляється від початкового положення на певний кут а в ту чи іншу сторону. При цьому провертається валик 33, який впливає на датчик 38. Датчик виробляє відповідний керуючий сигнал, що подається на двигун 15 (фіг. 1), який прискорює або уповільнює рух СМ по оброблюваній стінці, відновлюючи робоче положення візка CM. Задавальний механізм (фіг. 4) переміщення CM вздовж твірної оброблюваного виробу конструктивно аналогічний розглянутому вище задавальному механізму орієнтування. Але він працює у вертикальній площині В-В (фиг. 1), яка перпендикулярна площині Б-Б. Цей задавальний механізм переміщення містить валик 39, вільно встановлений в опорах 40. До валика прикріплена жорстка струна 41 з вантажем 42, яка коливається у вертикальній площині В-В (фіг. 1). Для умови стійкого коливання в заданій площині передбачені направляючі 43. До валика приєднаний імпульсний круговий датчик 44, який при відхиленні струни 40 від початкового положення на певний кут β, виробляє керуючий сигнал гальмування правої або лівої гусениць візка за допомогою керованих муфт 21 або 22 (фіг. 1), що приводить до відхилення траєкторії переміщення візка від положення по вертикалі. Це сприяє переміщенню CM вздовж твірної оброблюваного виробу. Механізм осцилюючого руху (фіг. 5) тримача дробоструминного сопла (фіг. 2) складається з валика 45 вільно встановленого в опорах 46. До валика жорстко прикріплений тримач сопла. Зубчато-рейкова передача складається із зубчатого колеса 47, закріпленого на валику, і рейкового осердя 48, який входить у симетрично розташовані обмотки (котушки) 49 і 50 соленоїда. Подаючи поперемінно електричний струм у котушки 49 і 50, зумовлюють осердя 48 здійснювати зворотно-поступальне переміщення, яке за допомогою зубчатого колеса 47 перетвориться у коливальний осцилюючий рух валика 45, а отже і дробоструминного сопла. Принцип дії CM приведений на технологічній схемі (фіг. 6, 7). Оброблюваний виріб 51 типу порожнистого тіла обертання, наприклад, суцільнозварний корпус хімічного апарата, що складається з циліндричної обичайки з привареними торцевими днищами, в одному з яких є люк (центральний або нецентральний), укладають на роликовий стенд 52. Торцеві днища можуть бути еліптичні, сферичні, конічні або іншої конфігурації. Самохідний модуль, завдяки наявності на траках гусеничного рушія магнітних пластин, прикріплюють на стінці внутрішньої (оброблюваної) поверхні так, щоб корпус CM займав певне робоче положення на деякому рівні h від нижньої точки К оброблюваного виробу. CM може бути встановлений в будь-якому положенні. Робоче положення обумовлене тим, що в процесі дробоструминного очищення відпрацьований дріб падає вниз і скупчується в нижній частині циліндричної обичайки. Тому відпрацьований дріб не заважатиме пересуванню CM вздовж твірної оброблюваного корпусу апарата. Потім оброблюваному виробу 51 надають за допомогою роликів стенду 52 обертальний рух з деякою кутовою швидкістю ω, яка забезпечує для обичайки діаметру d, колову швидкість оброблюваного виробу vВ, рівну за абсолютною величиною швидкості подачі відбитку дробоструминного факела на оброблюваній поверхні. Одночасно з цим, самохідному модулю також задається переміщення на оброблюваній поверхні із швидкістю vТ=vВ, але протилежного напряму. Це сприяє тому, що в процесі дробоструминного очищення самохідний модуль, а, відповідно, і дробоструминне сопло знаходитиметься в робочому положенні на рівні h щодо поверхні оброблюваного виробу (фіг. 7). У разі можливого відхилення самохідного модуля від робочого положення на величину ±Δh спрацьовує задавальний механізм орієнтування положення по вертикалі CM, який за допомогою імпульсного кругового датчика виробляє керуючий сигнал, що впливає на привід переміщення 2 UA 114152 C2 5 10 15 20 25 30 35 40 45 50 CM. Швидкість модуля vT при цьому прискорюється або сповільнюється в залежності від знаку відхилення і він повертається на початковий рівень. Для обробки всієї внутрішньої поверхні CM повертають на деякий розрахунковий кут β відносно площини Б-Б шляхом гальмування правого трака гусеничного рушія (фіг. 1). Коли CM повернувся на кут β, про що сигналізує задавальний механізм переміщення (фіг. 4), гальмування правої гусениці припиняють, і CM починає рухатися із заданою швидкістю vT по деякій гвинтовій спіралі з кроком t, що забезпечує перекриття відбитків дробоструминного факела на оброблюваній поверхні виробу, що обертається. У разі відхилення на ±Δβ CM від заданого напряму пересування по гвинтовій спіралі на обичайці і архімедовій спіралі на днищах, спрацьовує механізм переміщення вздовж твірної корпусу апарата, який повертає СМ у вихідне положення. Слід відмітити, що дробоструминне очищення внутрішньої поверхні оброблюваного виробу необхідно починати з глухого днища, поступово переміщаючи CM вздовж твірної на циліндричну обичайку і потім на відкрите днище, тобто днище з люком. В процесі обробки механізм осцилюючого руху задає дробоструминному соплу деякий коливальний рух перпендикулярно виткам спіралей траєкторії руху (гвинтовій або Архімеда), забезпечуючи таким чином рівномірне дробоструминне очищення всієї внутрішньої поверхні. У процесі дробоструминного очищення повітряно-абразивна суміш подається від дробоструминного апарата до дробоструминного сопла, закріпленого за допомогою тримача на корпусі СМ, за допомогою гумо-тканинного рукава через люк відкритого днища корпусу хімічного апарата, що обертається. Переваги запропонованого технічного рішення, у порівнянні з найближчим аналогом: на порядок нижча матеріаломісткість; універсальність, тобто можливість обробляти внутрішню поверхню порожнистих виробів типу тіл обертання з різним розташуванням люка, що істотно розширює технологічні можливості пропозиції; можливість використання на будь-яких технологічних комплексах для дробоструминного очищення внутрішньої поверхні деталей ємнісної апаратури типу тіл обертання. ФОРМУЛА ВИНАХОДУ 1. Самохідний модуль (СМ) для дробоструминного очищення внутрішньої поверхні порожнистих виробів типу тіл обертання, наприклад суцільнозварних сталевих корпусів хімічних, харчових, біотехнічних та інших апаратів, що складається з циліндричної обичайки і торцевих днищ, одне з яких має люк, і містить механізм пересування дробоструминного сопла, систему керування і тримач дробоструминного сопла, який відрізняється тим, що механізм пересування дробоструминного сопла виконаний у вигляді візка з гусеничним рушієм, система керування виконана у вигляді встановлених в корпусі CM задавальних механізмів: орієнтування положення СМ по вертикалі на стінці оброблюваного корпусу апарата, переміщення CM вздовж твірної кривої корпусу апарата, тримач дробоструминного сопла доповнений механізмом осцилюючого руху. 2. Самохідний модуль за п. 1, який відрізняється тим, що на траки гусеничного рушія самохідного візка рівномірно встановлені магнітні пластини. 3. Самохідний модуль за п. 1, який відрізняється тим, що кожен задавальний механізм виконаний у вигляді сполученого з імпульсним круговим датчиком шарнірно встановленого валика, до якого на жорсткій струні підвішений вантаж, здатний провертати валик при відхиленні струни від вертикалі, що приводить до зміни керуючого сигналу кругового датчика, який впливає на привід самохідного модуля. 4. Самохідний модуль за п. 1, який відрізняється тим, що осцилюючий механізм тримача дробоструминного сопла виконаний у вигляді встановленого на опорах циліндричного стержня, який за допомогою механічної передачі сполучений з магнітним осердям, що входить у дві симетрично встановлені обмотки (котушки) соленоїда. 3 UA 114152 C2 4 UA 114152 C2 5 UA 114152 C2 Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B62D 55/06, B08B 9/08, B25J 9/00, B08B 9/00, B08B 9/032, B62D 55/265
Мітки: модуль, самохідний, очищення, дробоструминного
Код посилання
<a href="https://ua.patents.su/8-114152-samokhidnijj-modul-dlya-drobostruminnogo-ochishhennya.html" target="_blank" rel="follow" title="База патентів України">Самохідний модуль для дробоструминного очищення</a>
Самохідний маніпулятор для дробоструминного очищення
Номер патенту: 109105
Опубліковано: 10.08.2016
Автори: Чернявський Анатолій Миколайович, Ковальчук Станіслав Богданович, Шулянський Григорій Анатолійович, Черняк Роман Євгенійович, Горик Олексій Володимирович, Брикун Олександр Миколайович
МПК: B25J 11/00
Мітки: маніпулятор, самохідний, очищення, дробоструминного
Формула / Реферат:
1. Самохідний маніпулятор (СМ) для дробеструменевого очищення внутрішньої поверхні порожнистих виробів типу тіл обертання, наприклад суцільнозварних сталевих корпусів хімічних, харчових, біотехнічних та інших апаратів, що складається з циліндричної обичайки і торцевих днищ, одне з яких має люк, і містить механізм пересування дробеструменевого сопла, систему керування і тримач дробеструменевого сопла, який відрізняється тим, що механізм...
Самохідний зернозбиральний комбайн (варіанти)
Номер патенту: 72478
Опубліковано: 15.03.2005
Автор: Шверсманн Бертольд
МПК: A01D 41/02
Мітки: комбайн, самохідний, варіанти, зернозбиральний
Формула / Реферат:
1. Самохідний зернозбиральний комбайн з фронтальним пристроєм для приймання збираної маси і розташованим за цим пристроєм похилим транспортером, з якого збирана маса з проміжним підключенням працюючого в тангенціальному потоці молотильного пристрою або безпосередньо за похилим транспортером розділяється на два потоки, проходить до працюючого в осьовому потоці молотильного і розділювального пристрою, або розділювального пристрою, що...
Самохідний пристрій для очищення внутрішньої поверхні трубопроводу
Номер патенту: 6982
Опубліковано: 31.03.1995
Автори: Перуєв Олександр Анатолійович, Жилін Анатолій Микитович
МПК: B08B 9/027, B08B 9/04
Мітки: поверхні, самохідний, внутрішньої, трубопроводу, пристрій, очищення
Формула / Реферат:
1. Самодвижущееся устройство для очистки внутренней поверхности трубопровода, имеющее корпус с осевым гнездом для подсоединения шланга от источника подачи рабочей среды под давлением и каналами для подачи рабочей среды в камеру смешения, выполненную в связанном с корпусом наконечнике и сообщенную с кольцевым соплом, образованным торцами корпуса и наконечника и наклоненным в сторону корпуса, и узел регулирования ширины щели кольцевого сопла,...
Самохідний зернозбиральний комбайн
Номер патенту: 71927
Опубліковано: 17.01.2005
Автор: Шверсманн Бертольд
МПК: A01F 12/10
Мітки: самохідний, зернозбиральний, комбайн
Формула / Реферат:
1. Самохідний зернозбиральний комбайн з ходовою частиною, рамою, робочими органами для приймання, транспортування і вивантаження збираної маси, а також пристроями для приведення робочих органів, причому робочі органи включають щонайменше один працюючий за принципом тангенціального потоку молотильний або передаючий збирану масу барабан і два встановлених за ним працюючих за принципом осьового потоку розділюючих збирану масу, ротори, які...
Обприскувач самохідний
Номер патенту: 25255
Опубліковано: 10.08.2007
Автори: Чепов Олександр Леонідович, Бідах Микола Прокопович, Лонський Олег Миколайович, Барановський Олександр Семенович, Михальчук Валентина Миколаївна
МПК: A01M 7/00
Мітки: обприскувач, самохідний
Формула / Реферат:
1. Обприскувач самохідний, що містить шасі з широкопрофільними шинами низького тиску, силовий агрегат, бак, всмоктувальну та нагнітальну комунікації і штангу з розпилювачами, який відрізняється тим, що на штанзі перед розпилювачами встановлений екран під тупим кутом до напрямку руху.2. Обприскувач самохідний за п.1, який відрізняється тим, що кут нахилу екрана виконаний регульованим.
Попередній патент: Механізм повороту задніх коліс рульового керування автотракторної техніки
Наступний патент: Протизламна система зсувних рам
Випадковий патент: Спосіб переробки органічних відходів