B25J 9/00 — Маніпулятори з програмним управлінням
Самохідний модуль для дробоструминного очищення
Номер патенту: 114152
Опубліковано: 25.04.2017
Автори: Горик Олексій Володимирович, Шулянський Григорій Анатолійович, Ковальчук Станіслав Богданович, Чернявський Анатолій Миколайович, Брикун Олександр Миколайович, Черняк Роман Євгенійович
МПК: B08B 9/00, B08B 9/032, B08B 9/08 ...
Мітки: дробоструминного, очищення, самохідний, модуль
Формула / Реферат:
1. Самохідний маніпулятор (СМ) для дробоструминного очищення внутрішньої поверхні порожнистих виробів типу тіл обертання, наприклад суцільнозварних сталевих корпусів хімічних, харчових, біотехнічних та інших апаратів, що складається з циліндричної обичайки і торцевих днищ, одне з яких має люк, і містить механізм пересування дробоструминного сопла, систему керування і тримач дробоструминного сопла, який відрізняється тим, що механізм...
Мобільний робот для переміщення по довільно орієнтованим у робочому просторі поверхням
Номер патенту: 104113
Опубліковано: 12.01.2016
Автори: Топалов Андрій Миколайович, Герасін Олександр Сергійович, Кушнір Володимир Олександрович, Кондратенко Юрій Пантелійович, Рижков Ростислав Сергійович, Тростинський Михайло Миколайович
МПК: B25J 9/00, B25J 15/00
Мітки: робочому, мобільній, поверхням, переміщення, робот, орієнтованим, просторі, довільно
Формула / Реферат:
Мобільний робот для переміщення по довільно орієнтованим у робочому просторі поверхням, що містить вакуумний захватний пристрій безконтактного типу для утримання робота на поверхні, дистанційний блок керування електродвигунами мобільного робота та раму плоскої конструкції, яка оснащена колісним механізмом переміщення мобільного робота, що містить ведене колесо та пару ведучих коліс, які закріплені на задній частині плоскої рами і зв'язані...
Спосіб керування приводами маніпуляційної системи промислового робота
Номер патенту: 104215
Опубліковано: 10.01.2014
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: B25J 9/00, G05B 19/00
Мітки: спосіб, приводами, керування, системі, промислового, робота, маніпуляційної
Формула / Реферат:
Спосіб керування приводами маніпуляційної системи промислового робота, згідно з яким змінюють швидкості приводів поступального руху та обертального руху робота, причому так, що максимальні значення вказаних швидкостей поступального та обертального руху, відповідно
Спосіб керування рухом промислового робота

Номер патенту: 101651
Опубліковано: 25.04.2013
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович
МПК: B25J 9/00, C05B 19/00
Мітки: промислового, робота, спосіб, керування, рухом
Формула / Реферат:
Спосіб керування рухом промислового робота, при якому розгін і гальмування ланки робота здійснюють при максимальному приводному моменті, який відрізняється тим, що розгін і гальмування ланки робота здійснюють за наступним дискретним законом, який описується поліноміальною залежністю від аргументу часу
Спосіб керування кистю маніпулятора
Номер патенту: 63461
Опубліковано: 10.10.2011
Автори: Пестунов Володимир Михайлович, Стеценко Олексій Сергійович
МПК: B25J 9/00
Мітки: маніпулятора, кистю, керування, спосіб
Формула / Реферат:
Спосіб керування кистю маніпулятора, при якому затиск заготовки здійснюють при мінімальному, заздалегідь визначеному зусиллі і в ході транспортування контролюють відносне переміщення кисті і заготівки, а за наявності проковзувань зусилля затиску збільшують, який відрізняється тим, що зусилля затиску дискретно збільшують у функції сумарного сигналу датчика переміщення і його похідної, для чого сигнал датчика диференціюють, а коефіцієнт...
Модуль промислового робота
Номер патенту: 63459
Опубліковано: 10.10.2011
Автори: Пестунов Володимир Михайлович, Стеценко Олексій Сергійович
МПК: B25J 9/00
Мітки: робота, промислового, модуль
Формула / Реферат:
Модуль промислового робота, який містить корпус, кисть і привід грубих і точних переміщень по відповідній координаті переміщень, який відрізняється тим, що механізм виконавчого привода точних переміщень виготовлений у вигляді магнітострикційного стержня, послідовно установленого з передаточним механізмом руху по відповідній координаті переміщення і розташований у кінематичному ланцюгу до механізму переміщення, при цьому зазначений механізм...
Силовий привод

Номер патенту: 51838
Опубліковано: 10.08.2010
Автори: Лозянко Юрій Андрійович, Луценко Катерина Дмитрівна, Довженко Сергій Сергійович, Кузнєцов Юрій Миколайович
МПК: B25J 9/00, F15B 15/14
Формула / Реферат:
Силовий привод, що містить корпус, в якому на роликових напрямних встановлений циліндр, а у кришці циліндра виконані кільцеві демпфери для гальмування поршнів, який відрізняється тим, що телескопічний шток виконаний у вигляді кількох взаємозв'язаних порожнистих частин з можливістю їх переміщень в обидві сторони.
Модуль маніпулятора
Номер патенту: 75033
Опубліковано: 15.03.2006
Автори: Балакін Олексій Ігоревич, Бондарєва Наталя Анатоліївна, Копп Вадим Якович, Круговой Олександр Миколайович
МПК: B25J 9/00
Мітки: модуль, маніпулятора
Формула / Реферат:
Модуль маніпулятора, який містить перший та другий стержні, що розташовані у нерухомій напрямній, пневмоциліндр, шток якого встановлений з можливістю зворотно – поступального руху та жорстко зв’язаний з першим стержнем через рухому напрямну, пружний елемент, жорстко зв’язаний з першим та другим стержнями, та також обладнаний електропневмоперетворювачами, зв’язаними з гальмівними головками і датчиком зворотного зв'язку, який відрізняється...
Модуль маніпулятора
Номер патенту: 75032
Опубліковано: 15.03.2006
Автори: Бондарєва Наталя Анатоліївна, Балакін Олексій Ігоревич, Круговой Олександр Миколайович, Копп Вадим Якович
МПК: B25J 9/00
Мітки: маніпулятора, модуль
Формула / Реферат:
Модуль маніпулятора, який містить пневмопривід, зв'язаний з пружним елементом, та гальмівні головки, кінематично зв’язані з електропневмоперетворювачами, який відрізняється тим, що пневмопривід виконаний у вигляді моментного циліндра, шток якого має можливість повороту і жорстко з’єднаний з пружним елементом, який має форму східчастого вала, причому гальмівні головки виконані у вигляді різноплечих клемних затискачів з можливістю фіксації...
Оброблювальний центр
Номер патенту: 63128
Опубліковано: 15.01.2004
Автори: Марчук Віктор Іванович, Шабайкович Віктор Антонович, Григор'єва Наталія Сергіївна
МПК: B25J 9/00
Мітки: центр, оброблювальний
Формула / Реферат:
1. Оброблювальний центр, що містить позиції обробки деталей, інструментальні блоки, магазини інструментів і накопичувачі деталей, завантажувачі, транспортну систему, систему керування і приводи, який відрізняється тим, що його транспортна система та функціональні вузли виконані у формі багатошарового сфероїда, змонтованого на обладнаній приводами площинній основі, при цьому позиції обробки деталей розташовані еквідистантно по колах першого...
Складальний центр
Номер патенту: 55715
Опубліковано: 15.04.2003
Автори: Григор'єва Наталія Сергіївна, Марчук Віктор Іванович, Шабайкович Віктор Антонович, Поліщук Олександр Степанович
МПК: B25J 9/00
Мітки: центр, складальний
Формула / Реферат:
1. Складальний центр, що містить складальні та інструментальні позиції, накопичувачі складальних інструментів і комплектуючих деталей, приводи, систему керування, який відрізняється тим, що складальний центр виконаний у формі багатошарового сфероїда, змонтованого на оснащеній приводами площинній основі, при цьому інструментальні позиції розташовані еквідистантно в нерухомому зовнішньому шару сфероїда, складальні позиції розташовані у...
Координатно-вимірювальна машина
Номер патенту: 22585
Опубліковано: 17.03.1998
Автори: Гонта Ольга Петрівна, Воробьйов Петро Іванович, Телегіна Олександра Львівна
МПК: G01B 5/02, B25J 9/00
Мітки: координатно-вимірювальна, машина
Формула / Реферат:
1. Координатно-измерительная машина, содержащая основание, корпус с опорами для вращения плеча с опорой предплечья и балансировочным грузом, предплечья с балансировочным грузом, измерительную головку, отличающаяся тем, что она содержит, в качестве одной из координат, закрепленный на основании с возможностью программного перемещения в вертикальном направлении стол с измеряемыми деталями, дополнительный груз с измерительной головкой,...
Пристрій для обертання виконавчого органу маніпулятора
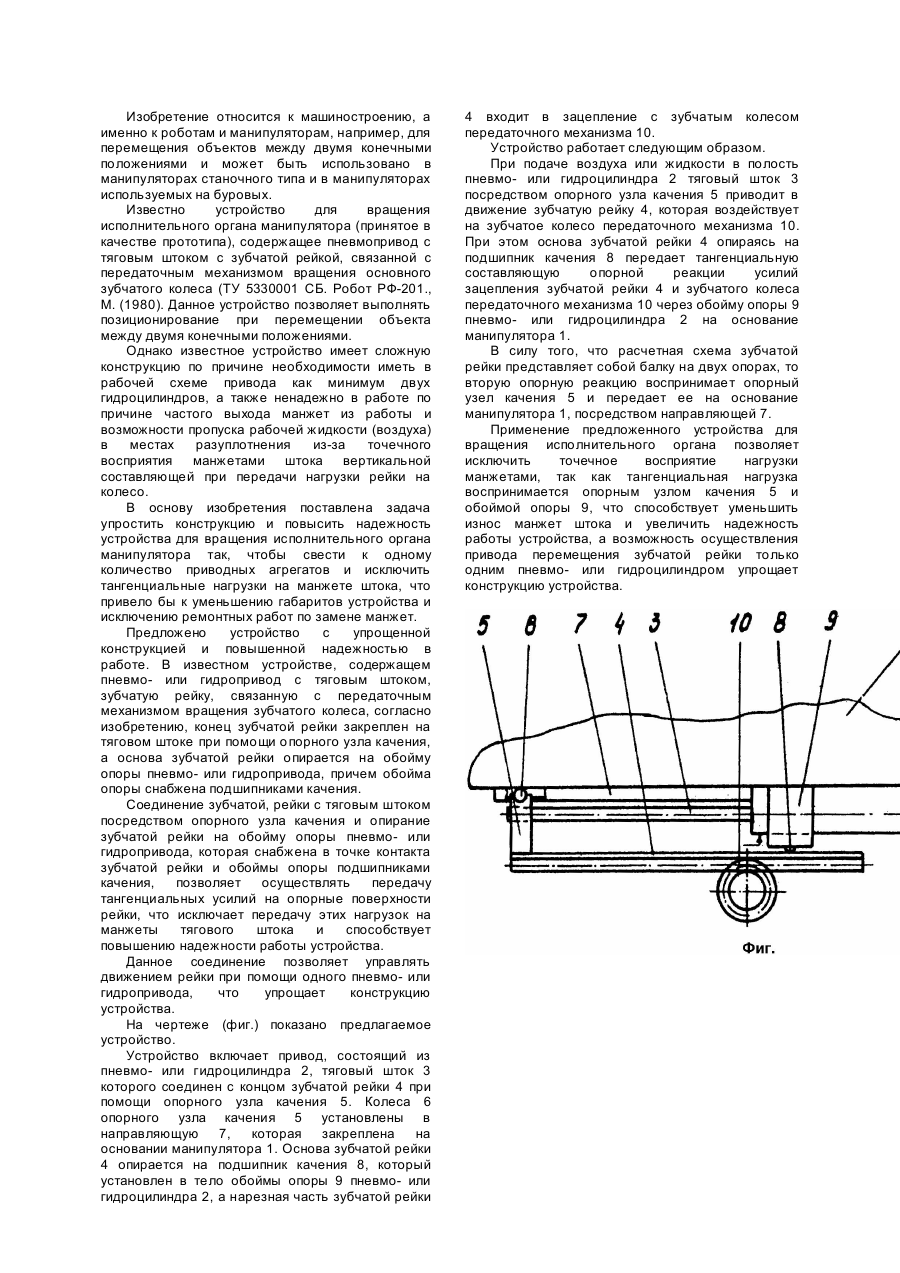
Номер патенту: 15436
Опубліковано: 30.06.1997
Автор: Свід Леонід Прокопович
МПК: E21B 19/00, B25J 9/00
Мітки: виконавчого, органу, обертання, маніпулятора, пристрій
Формула / Реферат:
Устройство для вращения исполнительного органа манипулятора, содержащее пневмо- или гидропривод с тяговым штоком, зубчатую рейку, связанную с передаточным механизмом вращения зубчатого колеса, отличающееся тем, что конец зубчатой рейки закреплен на тяговом штоке при помощи опорного узла качения, а основа зубчатой рейки опирается на обойму опоры пневмо- или гидропривода, причем обойма опоры пневмо- или гидропривода снабжена подшипниками...
Маніпулятор інженера м.в.лєонєнко
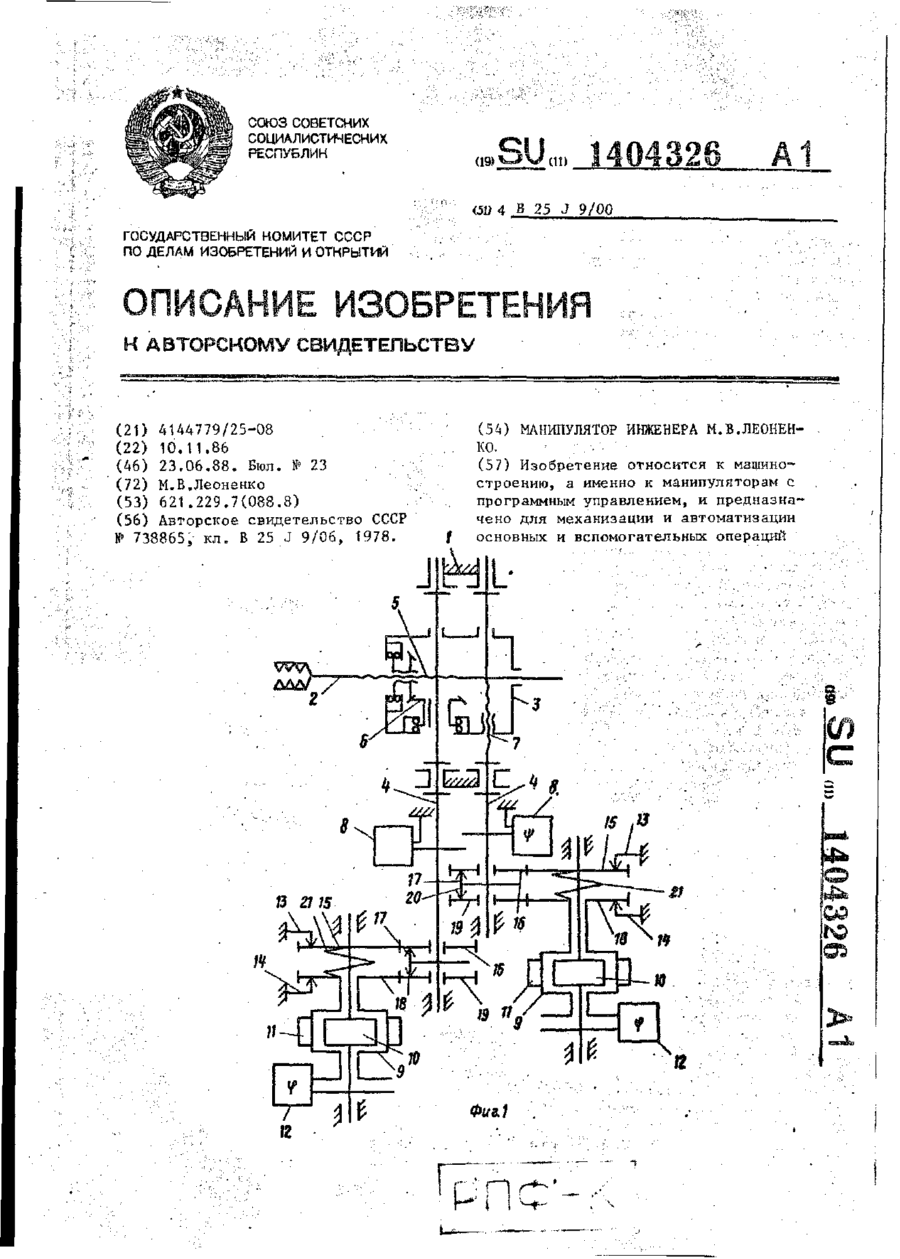
Номер патенту: 9003
Опубліковано: 30.09.1996
Автор: Лєонєнко Михайло Васильович
МПК: B25J 9/00
Мітки: м.в.лєонєнко, інженера, маніпулятор
Формула / Реферат:
1. Манипулятор, содержащий установленный на основании исполнительный орган с приводами его перемещения, каждый из которых включает двигатель, кинематическую цепь для связи двигателя с исполнительным органом, упругий элемент и систему управления, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения возможности позиционирования исполнительного органа в любой точке рабочей зоны манипулятора и повышения...
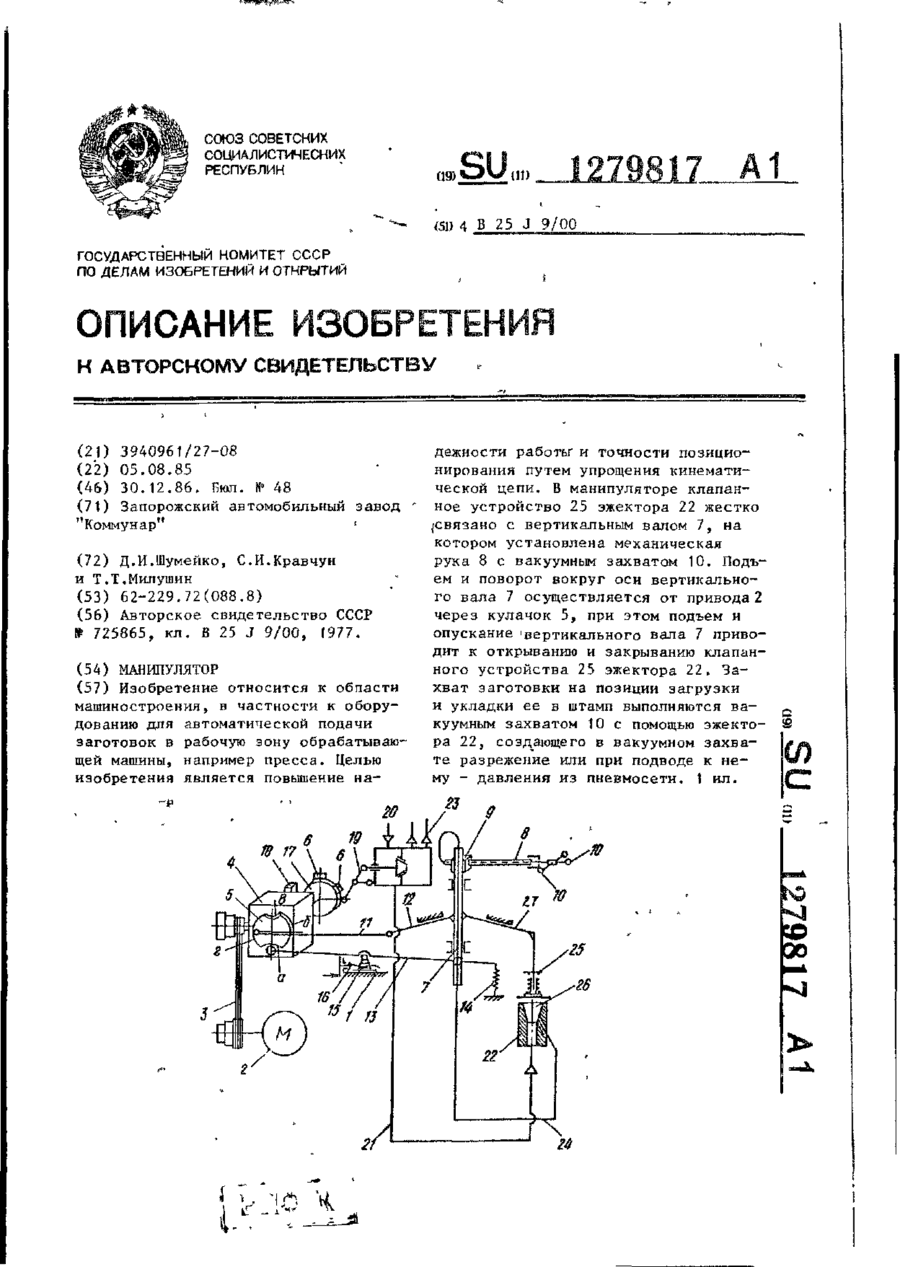
Маніпулятор
Номер патенту: 188
Опубліковано: 30.04.1993
Автори: Мілушин Тимофій Тимофійович, Кравчун Степан Іванович, Шумейко Дмитро Іванович
МПК: B25J 9/00
Мітки: маніпулятор
Формула / Реферат:
Формула изобретенияМанипулятор, содержащий механическую руку с пневматическими захватными органами, установленную на вертикальном валу, связанном посредством рычажной системы, с приводом ее подъема и поворота, кулачки, закрепленные на валу редуктора и взаимодействующие с пневмоклапаном, связанным трубопроводом с пневматическими механизмами, и эжектор с клапанным устройством, связанный трубопроводом с пневматическими захватными...