Спосіб автоматизованого нівелювання
Номер патенту: 114461
Опубліковано: 12.06.2017
Автори: Крячок Сергій Дмитрович, Малік Тетяна Миколаївна, Телюков Андрій Віталійович, Брик Ярослав Петрович, Бурачек Всеволод Германович


Формула / Реферат
Спосіб автоматизованого нівелювання, що включає визначення перевищення по двох опорних висотних візирних марках і вимірювання відстані від нівелірного оптико-електронного приладу до візирних марок, який відрізняється тим, що нівелювання виконують одночасно подвійним візуванням по взаємно протилежних горизонтальних напрямках, а також вимірюють величини відхилень зображень центрів візирних марок на мішенях блока матриць нівелірного оптико-електронного приладу; одночасно вимірюють вертикальні відстані від площини основи стійки нівелірного оптико-електронного приладу до поверхні ділянки в точці нівелювання ультразвуковим давачем, при цьому виконують переміщення нівелірного оптико-електронного приладу в стулці опорних візирних марок та визначають перевищення поверхні відносно двох реперів в крайніх точках стулки за формулою, в основу якої покладено рівняння, в якому в кожній точці по лінії стулки відмітка нівелюючої поверхні є функцією ƒ виміряних величин ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() :
:
![]() ,
,
де ![]() - відмітка висоти кожної нівелюючої точки майданчика по лінії стулки візирних марок;
- відмітка висоти кожної нівелюючої точки майданчика по лінії стулки візирних марок;
![]() і
і ![]() - горизонтальні відстані, що вимірюються від оптико-електронного приладу до центрів візирних марок відповідно;
- горизонтальні відстані, що вимірюються від оптико-електронного приладу до центрів візирних марок відповідно;
![]() і
і ![]() - відліки в частках пікселів на мішенях подвійної матриці оптико-електронного приладу;
- відліки в частках пікселів на мішенях подвійної матриці оптико-електронного приладу;
![]() - довжина стійки оптико-електронного блока від приймально-передавальної площини ультразвукового давача до центральної точки оптико-електронного блока;
- довжина стійки оптико-електронного блока від приймально-передавальної площини ультразвукового давача до центральної точки оптико-електронного блока;
![]() - відстань від поверхні площини до приймально-передавальної площини ультразвукового давача;
- відстань від поверхні площини до приймально-передавальної площини ультразвукового давача;
![]() і
і ![]() - відмітки висот центрів опорних візирних марок;
- відмітки висот центрів опорних візирних марок;
положення оптико-електронного перетворювача в стулці опорних візирних марок контролюють за взаємним положенням зображень цих марок в горизонтальному напрямку на екрані пульта керування, а контроль положення осі оптико-електронного приладу відносно горизонту- по різниці відліків ![]() та
та ![]() по мішенях блока матриць нівелірного оптико-електронного приладу.
по мішенях блока матриць нівелірного оптико-електронного приладу.
Текст
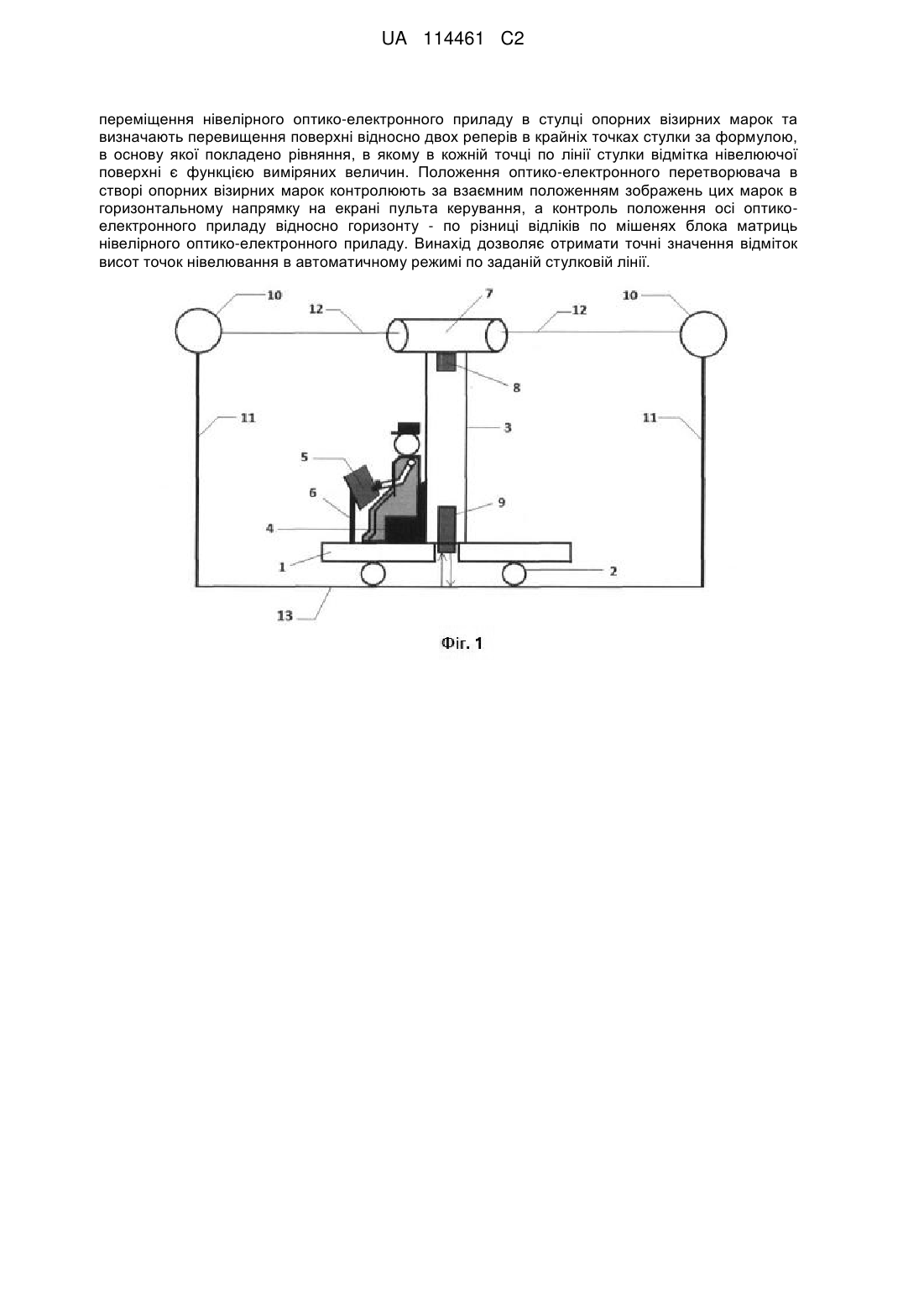
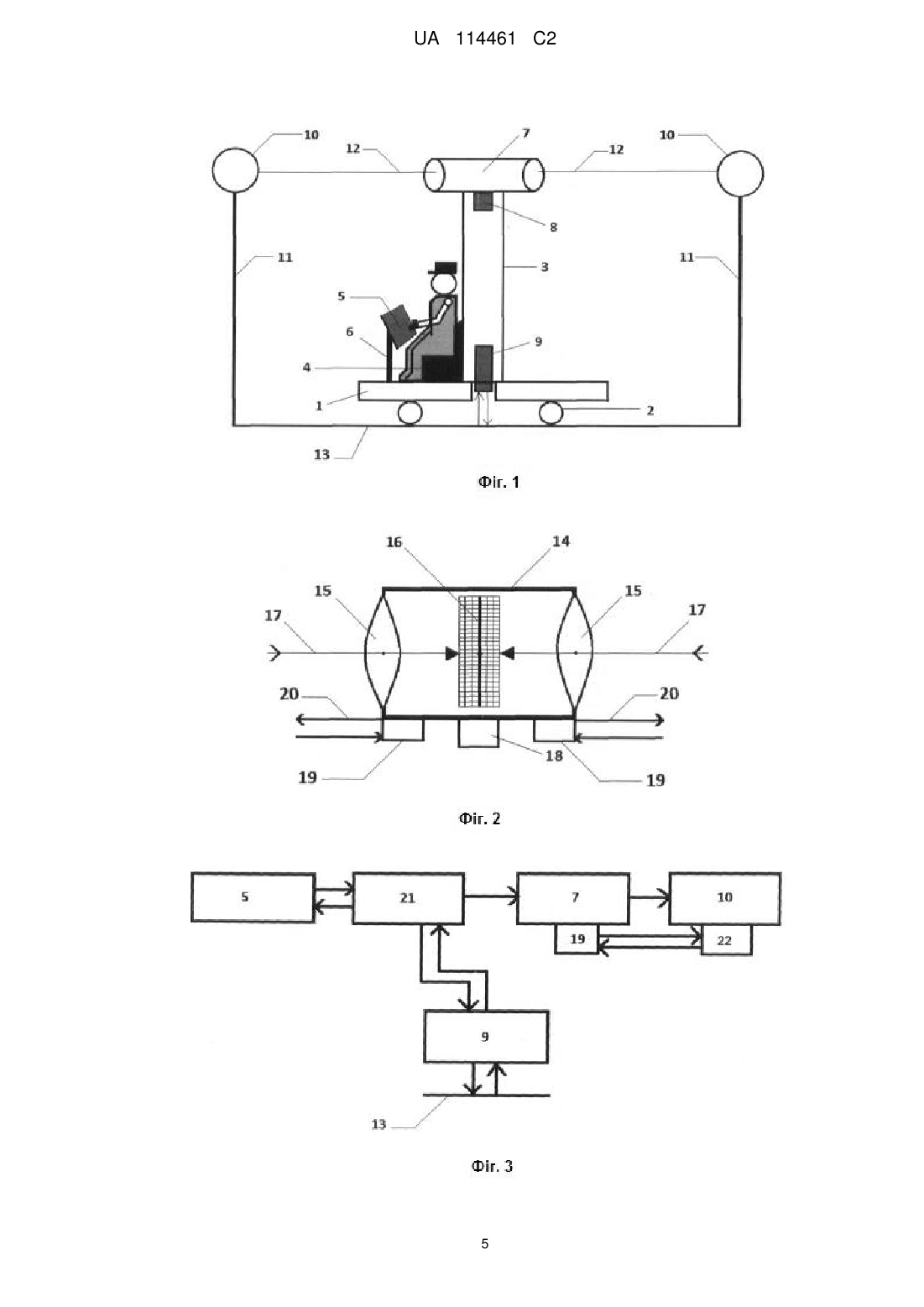
Реферат: Даний винахід належить до галузі інженерної геодезії. Заявлений спосіб автоматизованого нівелювання включає визначення перевищення по двох опорних висотних візирних марках і вимірювання відстані від нівелірного оптико-електронного приладу до візирних марок. Нівелювання виконують одночасно подвійним візуванням по взаємно-протилежних горизонтальних напрямках, а також вимірюють величини відхилень зображень центрів візирних марок на мішенях блока матриць нівелірного оптико-електронного приладу, одночасно вимірюють вертикальні відстані від площини основи стійки нівелірного оптико-електронного приладу до поверхні ділянки в точці нівелювання ультразвуковим давачем. Виконують UA 114461 C2 (12) UA 114461 C2 переміщення нівелірного оптико-електронного приладу в стулці опорних візирних марок та визначають перевищення поверхні відносно двох реперів в крайніх точках стулки за формулою, в основу якої покладено рівняння, в якому в кожній точці по лінії стулки відмітка нівелюючої поверхні є функцією виміряних величин. Положення оптико-електронного перетворювача в створі опорних візирних марок контролюють за взаємним положенням зображень цих марок в горизонтальному напрямку на екрані пульта керування, а контроль положення осі оптикоелектронного приладу відносно горизонту - по різниці відліків по мішенях блока матриць нівелірного оптико-електронного приладу. Винахід дозволяє отримати точні значення відміток висот точок нівелювання в автоматичному режимі по заданій стулковій лінії. UA 114461 C2 5 10 15 20 25 30 35 40 45 50 55 Спосіб автоматизованого нівелювання належить до галузі інженерної геодезії. Існує кілька основних способів і методів нівелювання: геометричне, тригонометричне, гідростатичне, барометричне, механічне, стереофотограмметричне [1-4]. Відомий спосіб геометричного нівелювання зсередини, оснований на нівелюванні горизонтальним променем по двох нівелірних рейках [1, 2]. Цей спосіб дозволяє отримати високу точність, але суттєвим недоліком є висока трудомісткість нівелювання внаслідок великого об'єму ручних робіт і візуальних вимірювань [1, 2]. Цей же спосіб нівелювання із вдосконаленням у вигляді оптико-електронних автоматизованих вимірювань перевищень на станції [2] забезпечує досить високу точність нівелювання, при цьому недоліком його залишається висока трудомісткість ручних робіт, пов'язаних з перенесенням і встановленням нівеліру і рейок. Спосіб тригонометричного нівелювання виконують похилим візирним променем, наприклад, оптичною системою теодоліту. Часто такий вид нівелювання використовують при створенні висотного обґрунтування теодолітних ходів, при передачі висот через неприступні відстані, при великих ухилах місцевості, в гірських виробках, коли точки спостереження знаходяться в покрівлі виробки, а також у виробках, що мають значні ухили [3]. Недоліком способу тригонометричного нівелювання є висока складність ручних вимірювань. Спосіб барометричного нівелювання базується на вимірюванні атмосферного тиску зі зміною висоти точки місцевості. Точність цього методу невелика, від 1 до 5 м, що є суттєвим недоліком цього способу, проте часто барометричний спосіб нівелювання застосовують в геології при пошукових роботах в гірській і значно пересіченій місцевості, при великих перепадах висот [2, 4]. При гідростатичному способі нівелювання використовується властивість рідин встановлюватися в сполучених посудинах на одному рівні. Гідростатичні нівеліри є частіше за все стаціонарними системами і складаються з декількох вимірювальних посудин, об'єднаних між собою гнучкими шлангами, що є суттєвим недоліком способу у сенсі відсутності мобільності засобів нівелювання і непридатності для нівелювання поверхні відкритих майданчиків [2, 4]. Такі системи встановлюють на греблях гідроелектростанцій, в гірських виробках при дослідженні геомеханічних процесів, на прецизійних технологічних комплексах. Спосіб стереофотограмметричного нівелювання реалізується при обробці стереопари фотознімків однієї і тієї ж місцевості, отриманих як при наземній фототеодолітній зйомці, так і при повітряній зйомці з літальних апаратів [5]. При наземній зйомці використовують фототеодоліт, що являє собою теодоліт, поєднаний з фотоапаратом. При повітряній зйомці застосовуються спеціальні аерофотоапарати, що встановлюються на літаку на гіростабілізуючій платформі, яка дозволяє утримувати оптичну вісь фотокамери у висковому або близькому до нього положенні. Недоліком даного способу є низька точність нівелювання - десятки сантиметрів. Як аналог, прийнятий за прототип, слід вибрати спосіб геометричного нівелювання з автоматизованим вимірюванням по кодових рейках [2]. Загальні ознаки даного способу із запропонованим: 1) схема візування по двох рейках із розміщенням оптико-електронного (ОЕ) приладу між рейками; 2) автоматизований відлік по рейках і обчислення перевищень. Задачею винаходу є створення способу, який дозволяє оперативно і з високою точністю і детальністю автоматично виконувати нівелювання поверхні майданчика за заданим напрямком. Поставлена задача вирішується за рахунок створення способу автоматизованого нівелювання, що ґрунтується на визначенні перевищення по двох опорних висотних (нівелірних) візирних марках і вимірюванні відстані від нівелірного оптико-електронного приладу до візирних марок, згідно з винаходом, нівелювання виконують одночасно подвійним візуванням по взаємно протилежних горизонтальних напрямках, а також вимірюють величини відхилень зображень центрів візирних марок на мішенях блока матриць нівелірного оптико-електронного приладу; одночасно вимірюють вертикальні відстані від площини основи стійки нівелірного оптикоелектронного приладу до поверхні ділянки в точці нівелювання ультразвуковим давачем, при цьому виконують переміщення нівелірного оптико-електронного приладу в стулці опорних візирних марок та визначають перевищення поверхні відносно двох реперів в крайніх точках стулки за формулою, в основу якої покладено рівняння, в якому в кожній точці по лінії стулки відмітка нівелюючої поверхні є функцією виміряних величин S1 , S 2 , a 1 , a 2 , l , l , HbM , HbM : 1 Hi f S1, S2 , a1, a 2 ,l, l,HbM1 ,HbM2 , 1 2 UA 114461 C2 5 10 15 20 де H i - відмітка висоти кожної нівелюючої точки майданчика по лінії стулки візирних марок; S1 і S 2 - горизонтальні відстані, що вимірюються від оптико-електронного приладу до центрів візирних марок відповідно; a 1 і a 2 - відліки в частках пікселів на мішенях подвійної матриці оптико-електронного приладу; l - довжина стійки оптико-електронного блока від приймально-передавальної площини ультразвукового давача до центральної точки оптико-електронного блока; l - відстань від поверхні площини до приймально-передавальної площини ультразвукового давача; HbM і HbM - відмітки висот центрів опорних візирних марок; 1 2 положення оптико-електронного перетворювача в створі опорних візирних марок контролюють за взаємним положенням зображень цих марок в горизонтальному напрямку на екрані пульта керування, а контроль положення осі оптико-електронного приладу відносно горизонту - по різниці відліків a 1 та a 2 по мішенях блока матриць нівелірного оптикоелектронного приладу. Перевищення поверхні відносно двох реперів в крайніх точках стулки можна визначити, наприклад, за наступним виразом: S1 S 2 HbM1 HbM2 1 1 Hi HbM1 HbM 2 S1a1 S 2a 2 l l , (1) 2 S1 S 2 2f HbM1 HR1 lM1 ; де - відмітки висот центрів опорних візирних марок; HbM 2 HR 2 lM2 , HR і HR - відмітки опорних реперів R1 і R 2 ; 1 2 lM1 і lM2 - довжини вертикальних стійок візирних марок (від реперів R1 і R 2 до центрів 25 30 35 40 45 50 марок bM1 і bM 2 ); f - фокусні відстані цифрових камер нівелірного оптико-електронного приладу. Технічним результатом є підвищення точності нівелювання в мобільному автоматизованому варіанті суцільного нівелювання поверхні горизонтального майданчика по лінії стулки візирних висотних марок. Таким чином, при збереженні високої точності нівелювання отримують детальний профіль поверхні майданчика по лініях стулок, утворених висотними візирними марками. Запропонований спосіб реалізується пристроєм, зображеним на фіг. 1. 1. Підставка. 2. Ходова частина. 3. Вертикальна стійка. 4. Сидіння оператора. 5. Пульт управління. 6. Стійка пульта правління. 7. Нівелірний оптико-електронний прилад (НОЕП). 8. Механізм обертання блока. 9. Блок ультразвукової локації. 10. Візирні марки. 11. Стійки візирних марок. 12. Візирні промені. 13. Поверхня майданчика. Всі блоки і вузли пристрою змонтовані на єдиній підставці 1 і закріплені з ходовою частиною 2. НОЕП 7, розміщений на вертикальній стійці 3, і з'єднаний з нею через механізм 8 повороту блока 7 на 180 навколо вертикальної осі. На фіг. 2 показано схему побудови НОЕП 7: 14 - корпус НОЕП; 15 - об’єктиви НОЕП; 16 - подвійна ПЗЗ-матриця з мішенями, утвореними у взаємно протилежних напрямках до світлових потоків 17, які формуються об’єктивами 15. Таким чином, елементи 15 і 16 утворюють дві цифрові камери, що складають НОЕП; 18 - вузол механізму 8 повороту осі приладу 7, керований з пульта управління 5; 19 - світловіддалемірний блок; 2 UA 114461 C2 5 10 15 20 25 30 35 40 45 50 55 20 - світлолокаційні промені. Візирні марки 10 (фіг. 1) можуть бути встановлені на постійних стовпах або тимчасових (мобільних) вертикальних стовпах, рейках і містити візирні пункти із світловим контрастом, наприклад, у вигляді світлодіодних матриць. В нижній частині візирних марок (щитів) встановлені відбивачі для світловіддалемірних вимірювань за допомогою блоків 19. На фіг. 3. показано блок-схему пристрою з основними блоками, що приймають участь у вимірюваннях: 5 - пульт управління; 21 - електронний блок обробки інформації; 7 - НОЕП; 9 - блок ультразвукової локації; 10 - висотні візирні марки; 19 - світловіддалемірний блок; 22 - відбивачі; 13 - поверхня майданчика. Візирні марки 10 можуть бути встановлені на постійних або тимчасових вертикальних стійках та мають у верхній частині візирні марки із світловим контрастом, наприклад у вигляді матриці, яка світиться, а також відбивачі для віддалемірних вимірювань. Описаний пристрій працює наступним чином. 1. Підготовка до нівелювання. 1.1. Встановлюють на ділянці нівелювання дві опорні візирні марки (ОВМ), які фіксують відмітки висот відносно реперів, які на клас нівелювання вище, ніж клас нівелювання поверхні ділянки, при цьому одночасно виконують нівелювання подвійним візуванням по взаємно протилежних горизонтальних напрямках. Відмітки висот ОВМ визначають з виразу HM HR lM , де HR - відмітка висоти репера, lM - перевищення по стійці ОВМ (центру візирної марки) над репером. 1.2. На пульті 5 в блок пам'ять вводять дані: - значення відміток висот візирних марок; - значення висоти l пристрою 7 відносно нижньої площини приймально-передавального ультразвукового давача; - значення координат візирних марок (в умовній системі координат, де X - стулкова лінія візирних марок). 1.3. Оператор виводить пристрій у стулку візирних марок 10. Контроль стулкового положення і орієнтацію пристрою і візирних осей НОЕП 7 виконують по табло пульта 5, оцінюючи взаємне положення на екрані дисплея в процесі установки і при нівелюванні. 2. Нівелювання майданчика по лініях стулки ОВМ. Встановлюють пристрій послідовно на точки на стулковій лінії центрів опорних візирних марок 1 і 2, вимірюють величини відхилень зображень центрів візирних марок на мішенях блока матриць нівелірного оптико-електронного приладу, тобто знімають відліки a 1 і a 2 по матрицях НОЕП пристрою в точках наведення під час зупинок або руху пристрою по стулковій лінії, також одночасно вимірюють вертикальні відстані від площини основи стійки нівелірного оптикоелектронного приладу до поверхні ділянки в точці нівелювання ультразвуковим давачем. При цьому виконують переміщення нівелірного оптико-електронного приладу в стулці опорних візирних марок та визначають перевищення поверхні відносно двох реперів в крайніх точках стулки за формулою (1). В кожній точці стулки вимірюють перевищення li - від поверхні майданчика до чутливої площині ультразвукового давача 17, при цьому контролюють розташування пристрою на стулковій лінії за зображенням опорних візирних марок 1 та 2 на екрані пульта керування 5. Вимірюють відстані від НОЕП 7 до опорної візирної марки 1- S1 , та до опорної візирної марки 2- S 2 . Таким чином, в кожній точці нівелювання вимірюють величини: - відстані S1 та S 2 ; - відстань l ; - відліки a 1 та a 2 . Ці дані надходять з блоків 7, 9 до пульта управління 5, який має блоки: обчислювальний, пам’яті та блок зберігання і запису інформації. 3 UA 114461 C2 5 10 Таким чином, запропонований спосіб автоматизованого нівелювання дозволяє отримати точні значення відміток висот точок нівелювання в автоматичному режимі по заданій стулковій лінії. Джерела інформації: 1. Куштин И.Ф. Инженерная геодезия: учебник / И.Ф. Куштин, В.И. Куштин - Ростов-на-Дону: ФЕНИКС, 2002. - 416 с. 2. Войтенко С.П. Інженерна геодезія / С.П. Войтенко - К.: Знання, 2009. - 557 с. 3. Левчук Г.П. Прикладная геодезия / Г.П. Левчук, В.Е. Новак, В.Г. Конусов - М: Недра, 1981. - 440 с. 4. Зайцев А.К. Геодезические методы исследования деформаций сооружений /А.К. Зайцев, С.В. Марфенко, Д.Ш. Михелев - М.: Недра, 1991. - 272 с. 5. Лобанов А.Н. Фотограмметрия/ Лобанов А.Н., Буров М.И., Краснопевцев Б.В. - М: Недра, 1987 - 309 с. ФОРМУЛА ВИНАХОДУ 15 20 25 Спосіб автоматизованого нівелювання, що включає визначення перевищення по двох опорних висотних візирних марках і вимірювання відстані від нівелірного оптико-електронного приладу до візирних марок, який відрізняється тим, що нівелювання виконують одночасно подвійним візуванням по взаємно протилежних горизонтальних напрямках, а також вимірюють величини відхилень зображень центрів візирних марок на мішенях блока матриць нівелірного оптикоелектронного приладу; одночасно вимірюють вертикальні відстані від площини основи стійки нівелірного оптико-електронного приладу до поверхні ділянки в точці нівелювання ультразвуковим давачем, при цьому виконують переміщення нівелірного оптико-електронного приладу в стулці опорних візирних марок та визначають перевищення поверхні відносно двох реперів в крайніх точках стулки за формулою, в основу якої покладено рівняння, в якому в кожній точці по лінії стулки відмітка нівелюючої поверхні є функцією ƒ виміряних величин S1 , S 2 , a 1 , a 2 , l , l , HbM1 , HbM 2 : Hi f S1, S2 , a1, a 2 ,l, l,HbM1 ,HbM2 , 30 35 40 де H i - відмітка висоти кожної нівелюючої точки майданчика по лінії стулки візирних марок; S1 і S 2 - горизонтальні відстані, що вимірюються від оптико-електронного приладу до центрів візирних марок, відповідно; a 1 і a 2 - відліки в частках пікселів на мішенях подвійної матриці оптико-електронного приладу; l - довжина стійки оптико-електронного блока від приймально-передавальної площини ультразвукового давача до центральної точки оптико-електронного блока; l - відстань від поверхні площини до приймально-передавальної площини ультразвукового давача; HbM1 і HbM 2 - відмітки висот центрів опорних візирних марок; положення оптико-електронного перетворювача в стулці опорних візирних марок контролюють за взаємним положенням зображень цих марок в горизонтальному напрямку на екрані пульта керування, а контроль положення осі оптико-електронного приладу відносно горизонту - по різниці відліків a 1 та a 2 по мішенях блока матриць нівелірного оптико-електронного приладу. 4 UA 114461 C2 5 UA 114461 C2 Комп’ютерна верстка А. Крулевський Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01C 5/00
Мітки: автоматизованого, нівелювання, спосіб
Код посилання
<a href="https://ua.patents.su/8-114461-sposib-avtomatizovanogo-nivelyuvannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматизованого нівелювання</a>
Пристрій автоматизованого нівелювання
Номер патенту: 112334
Опубліковано: 12.12.2016
Автори: Телюков Андрій Віталійович, Крячок Сергій Дмитрович, Брик Ярослав Петрович, Малік Тетяна Миколаївна, Бурачек Всеволод Германович
МПК: G01C 5/00
Мітки: пристрій, нівелювання, автоматизованого
Формула / Реферат:
Пристрій автоматизованого нівелювання, що містить оптико-електронний прилад з матричним фотоприймачем на підставці, електронні блоки керування, обробки, зберігання інформації, індикації, який відрізняється тим, що пристрій виконаний мобільним, підставка містить основу - візок з двигуном і механізмом керування, оснащену ультразвуковим давачем перевищень основи над поверхнею, що нівелюється, вертикальну стійку з механізмом повороту...
Спосіб нівелювання
Номер патенту: 60589
Опубліковано: 25.06.2011
Автор: Перій Сергій Сергійович
МПК: G01C 5/00
Мітки: нівелювання, спосіб
Формула / Реферат:
Спосіб нівелювання, що включає встановлення лінії візування горизонтально та спостереження зображення проекції точки візування (горизонтальний штрих сітки ниток) на ціль з подальшим врахуванням кривини Землі, який відрізняється тим, що візування виконують по лінії, що з'єднує візирний пристрій з відображенням його в прямовисно встановленому плоскому відбивачі (дзеркалі), який розташовують на кінці напрямку, по якому проводять...
Спосіб геометричного нівелювання “вперед, назад”
Номер патенту: 41429
Опубліковано: 25.05.2009
Автор: Перій Сергій Сергійович
МПК: G01C 5/00
Мітки: геометричного, вперед, назад, нівелювання, спосіб
Формула / Реферат:
Спосіб геометричного нівелювання, що включає вимірювання перевищення способом „вперед”, який відрізняється тим, що виконують подвійні вимірювання перевищення способом "вперед" в прямому і зворотному напрямі по одному і тому ж плечу нівелювання, при цьому результат нівелювання контролюють по стабільності кута сумарної негоризонтальності візирного променя.
Спосіб нівелювання
Номер патенту: 93646
Опубліковано: 25.02.2011
Автор: Перій Сергій Сергійович
МПК: G01C 5/00
Мітки: спосіб, нівелювання
Формула / Реферат:
Спосіб нівелювання, що включає встановлення лінії візування горизонтально та спостереження зображення проекції точки візування (горизонтальний штрих сітки ниток) на ціль з подальшим врахуванням кривини Землі, який відрізняється тим, що візування виконують по лінії, що з'єднує візирний пристрій з відображенням його в прямовисно встановленому плоскому відбивачі (дзеркалі), який розташовують на кінці напрямку, по якому проводять...
Спосіб тіньового нівелювання
Номер патенту: 86554
Опубліковано: 27.04.2009
Автори: Хропот Сергій Григорович, Шевченко Тарас Георгійович
МПК: G01C 5/00
Мітки: нівелювання, тіньового, спосіб
Формула / Реферат:
Спосіб тіньового нівелювання, який полягає у тому, що встановлюють джерело світла навпроти контрольованого об'єкта, проектують положення тіні об'єкта на прямовисний екран у вигляді зрізаної тіні і визначають по краю зрізаної тіні висотне положення об'єкта, який відрізняється тим, що положення краю зрізаної тіні визначають за допомогою фотоелектричного давача, який встановлюють з можливістю вертикального переміщення у прямовисній площині,...
Попередній патент: Застосування селено- й телуровмісних похідних 1,2,4-триазол-3-тіолу як бактерицидів та фунгіцидів
Наступний патент: Пристрій для множення чисел
Випадковий патент: Спосіб виробництва низькоетерифікованого рідкого пектину