Пристрій для аналізу помилкових дій екіпажу
Номер патенту: 115486
Опубліковано: 25.04.2017
Автори: Калмикова Лариса Миколаївна, Аль-Амморі Алі, Кеменяш Юрій Михайлович, Соченко Петро Степанович, Синєглазов Віктор Михайлович
Формула / Реферат
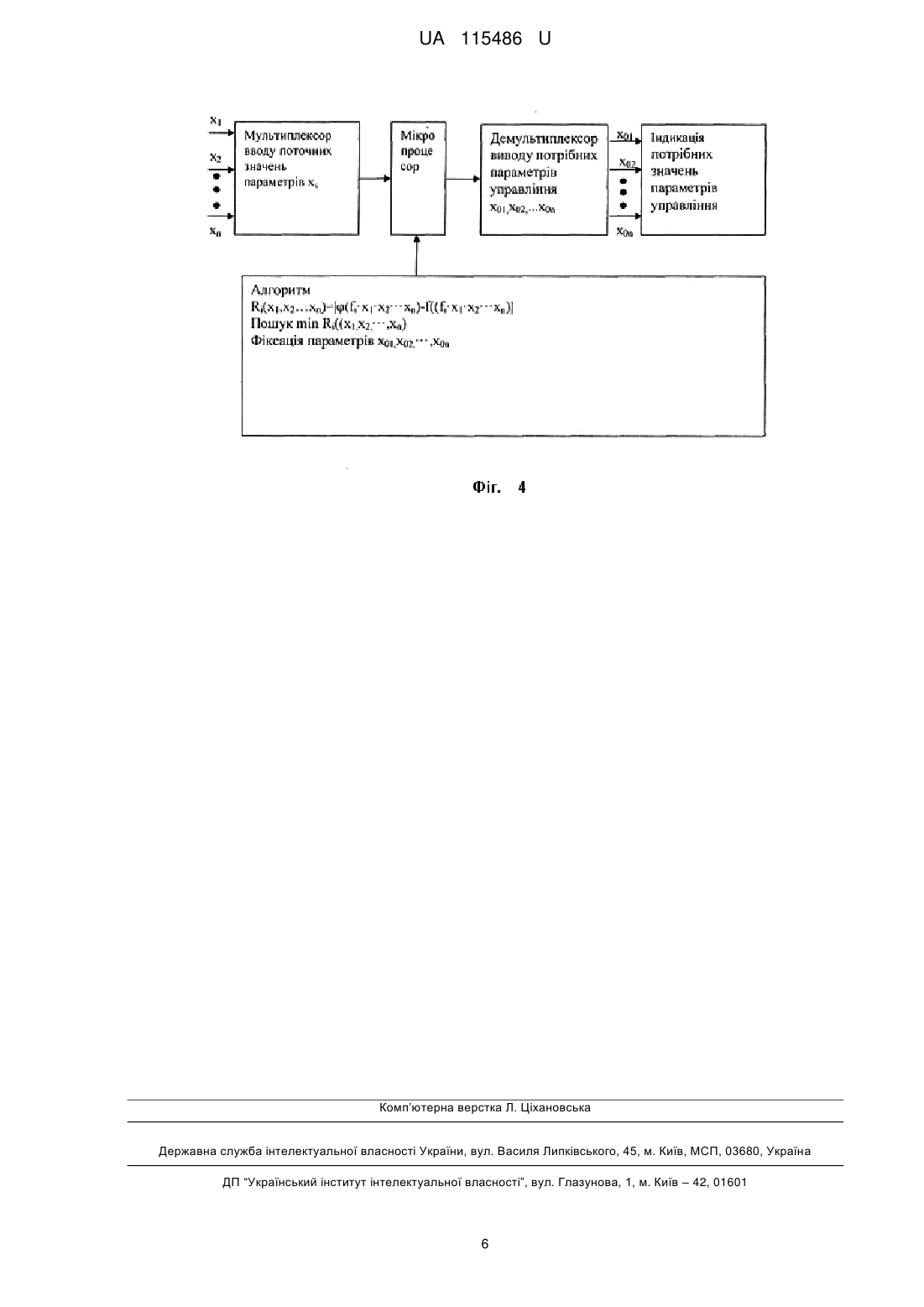
Пристрій для аналізу помилкових дій екіпажу, який відрізняється тим, що пристрої, які показують параметри польоту, підключені до мультиплексора вводу поточних значень параметрів, який з’єднано з мікроконтролером, в який подається алгоритм потрібних параметрів управління, мікроконтролер підключений до демультиплексора виводу потрібних параметрів управління, який під’єднаний до індикатора потрібних значень параметрів управління.
Текст
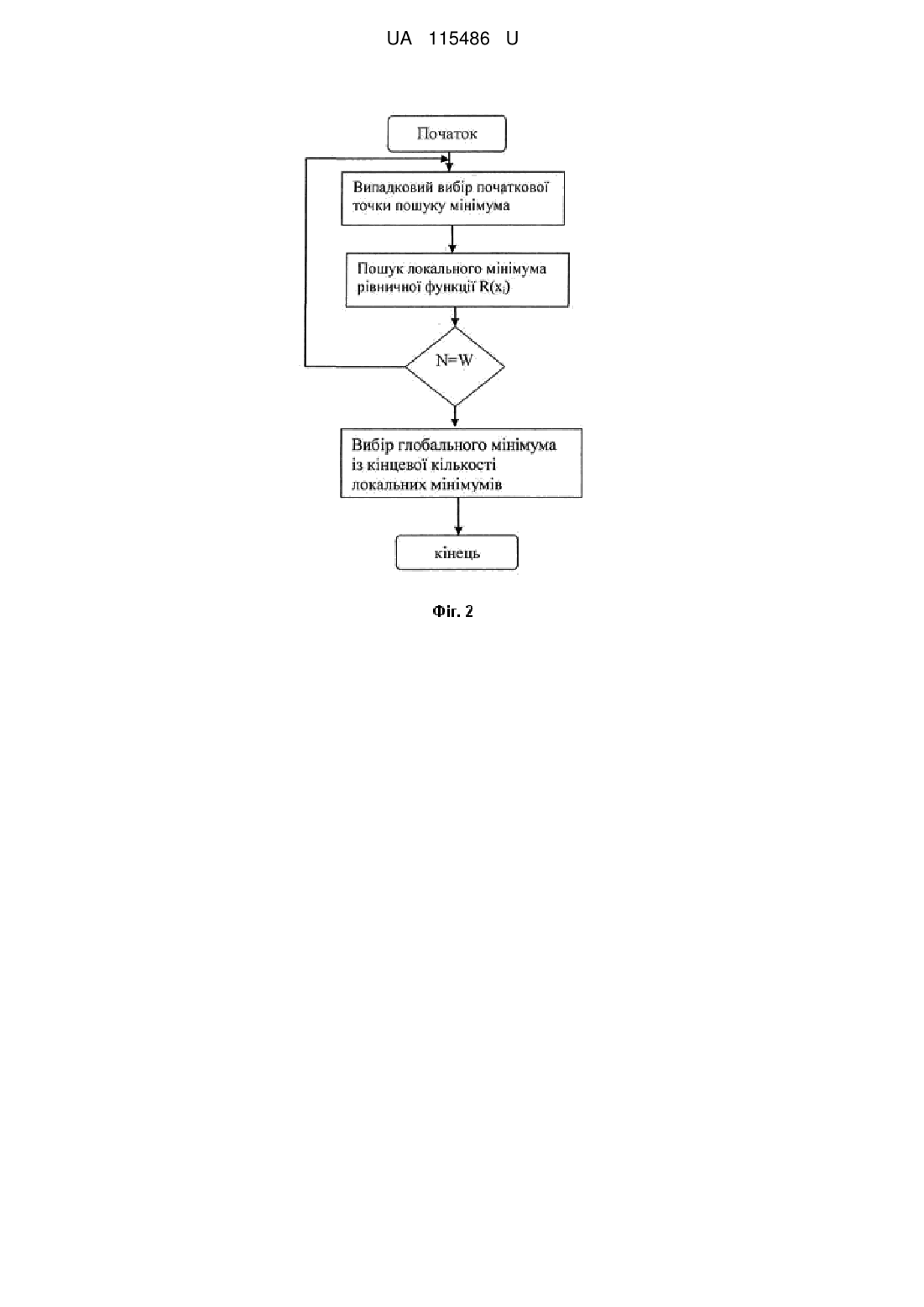
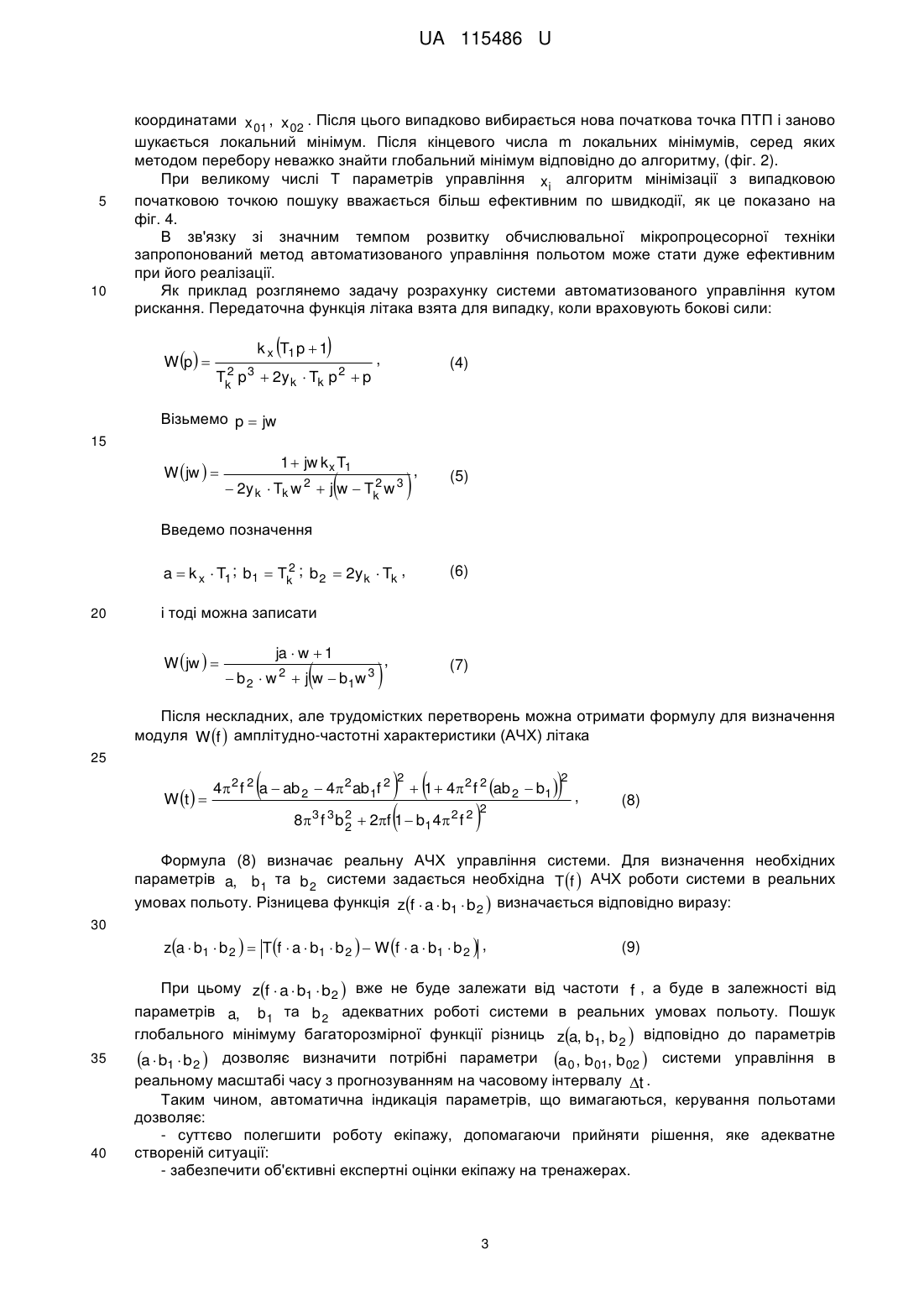
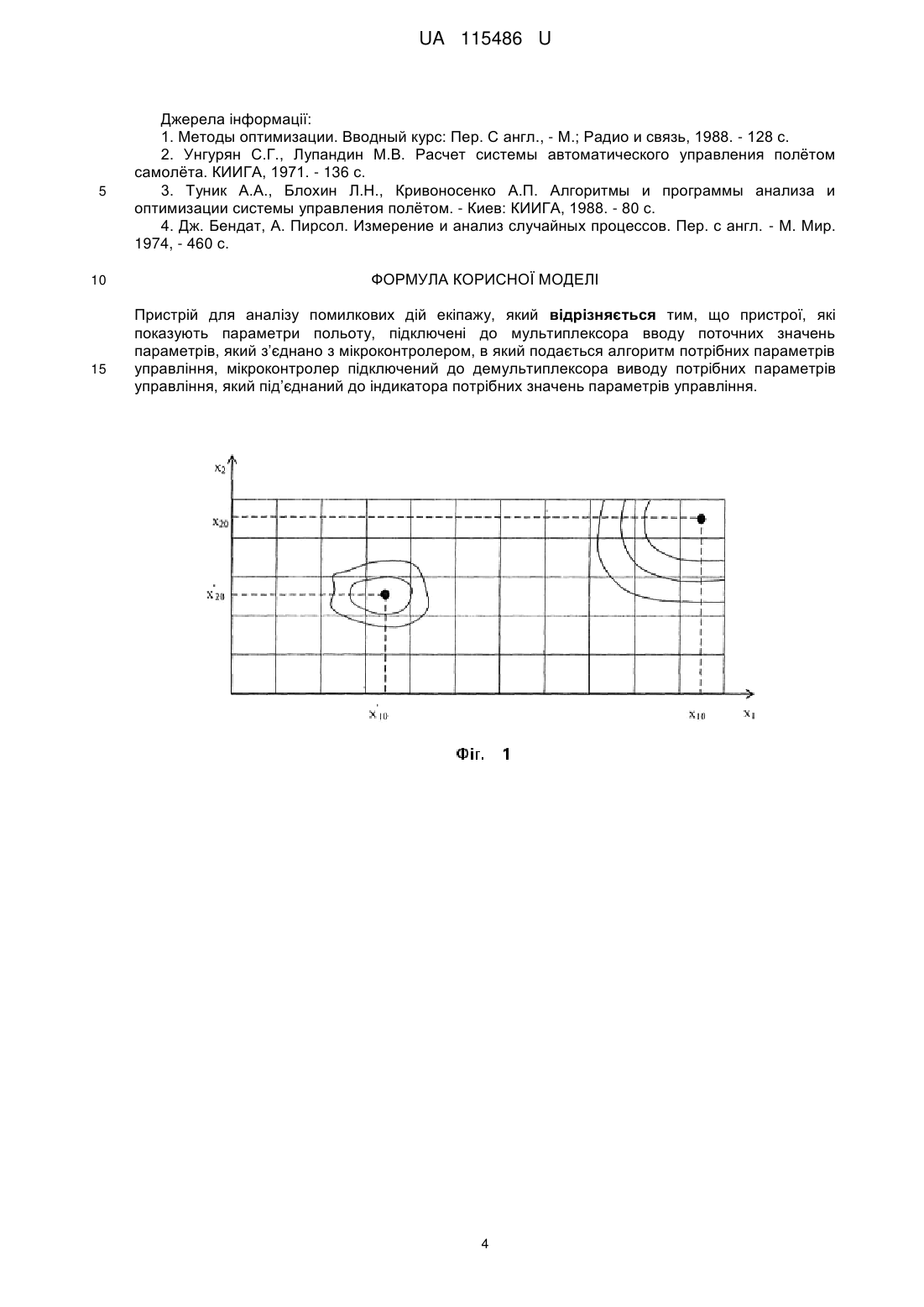
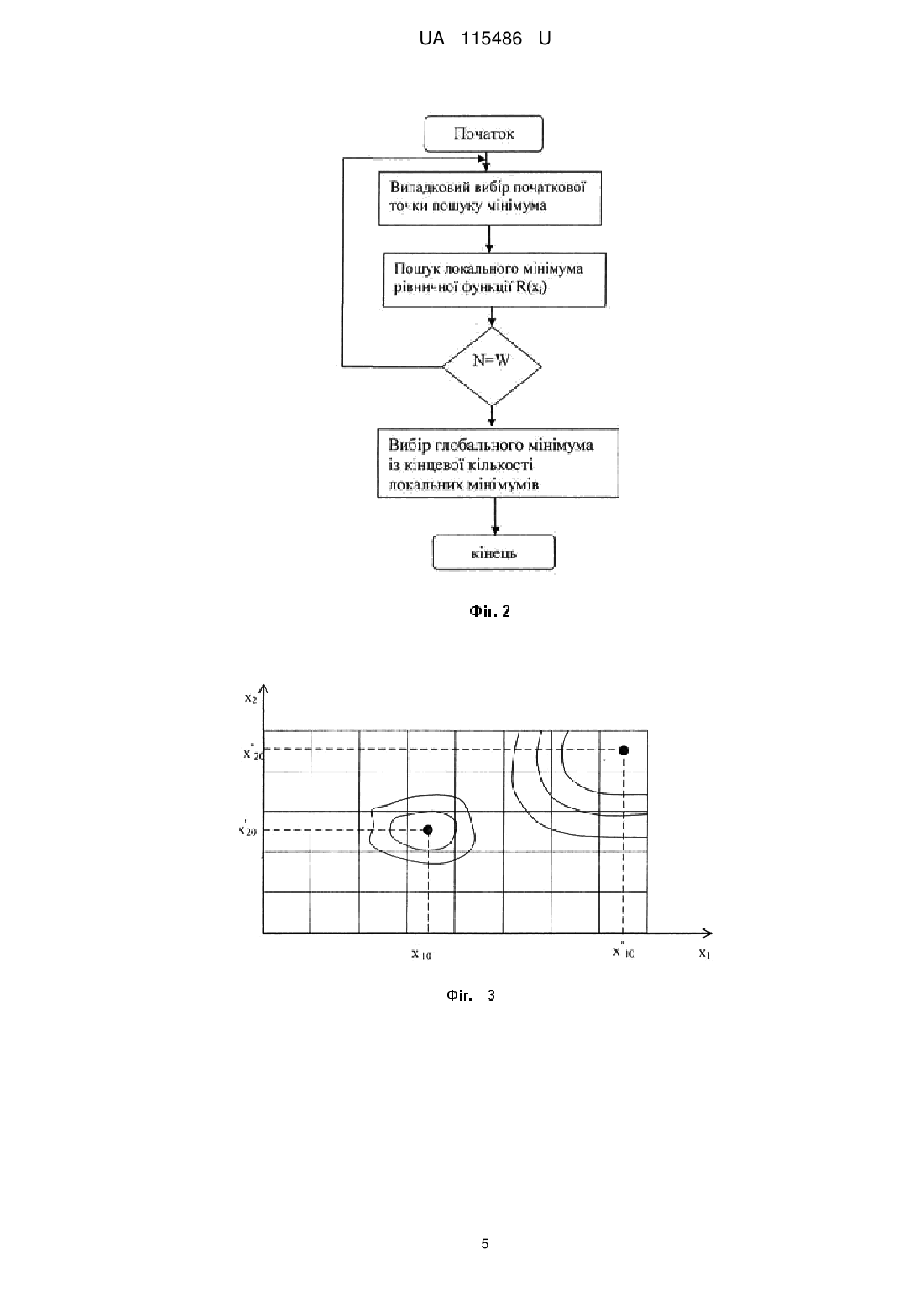
Реферат: Пристрій аналізу помилкових дій екіпажу, в якому пристрої, які показують параметри польоту підключені до мультиплексора вводу поточних значень параметрів, який з’єднано з мікроконтролером, в який подається алгоритм потрібних параметрів управління. Мікроконтролер підключений до демультиплексора виводу потрібних параметрів управління, який під’єднаний до індикатора потрібних значень параметрів управління. UA 115486 U (54) ПРИСТРІЙ ДЛЯ АНАЛІЗУ ПОМИЛКОВИХ ДІЙ ЕКІПАЖУ UA 115486 U UA 115486 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі авіації і може бути застосована при розробці і модернізації об'єктів авіаційної техніки, а саме до бортових систем обробки польотної інформації, що встановлюються на літальних апаратах. Відома система (Патент України UA 46849 Бортова система реєстрації та збереження польотної інформації / В.Є. Кротько, В.Л. Зубрик, В.Л. Кочуров, заявл. 01.07.2009, реєстраційний номер u 2009 06869) що містить реєстратор польотної інформації типу БР-4Т, в який вбудовано систему самоконтролю, блок збирання польотної інформації та пульт установки службових параметрів типу ПУ-4, зазначені блоки містять датчики аналогових, бінарних, частотних сигналів та разових сигналів/команд, при цьому реєстратор польотної інформації типу БР-4Т з'єднано з бортовою системою електроживлення, датчики з'єднано джгутами з відповідними блоками реєстратора польотної інформації, систему самоконтролю конструктивно і технологічно з'єднано з блоком збирання польотної інформації, з реєстратором польотної інформації типу БР-4Т та з пультом установки службових параметрів типу ПУ-4, причому до складу системи також входять погоджувальні пристрої, модулі типу М7 і МІ4 та з'єднувальний кабель, відповідно до корисної моделі, що до системи додатково введені датчики кутових швидкостей і датчики лінійних прискорювань корпусу літака відносно його головних центральних осей інерції та модулі типу М2 і M-HG, При цьому як реєстратор польотної інформації використаний пристрій типу БУР-4-1-01 або будь-яка з його подальших модифікацій, До того ж блок збору польотної інформації використаний блок збору польотної інформації типу БСИ-4-01. Корисна модель, що заявляється, дозволяє здійснити автоматичну обробку польотних даних з високою точністю, і, крім того, знизити вартість системи за рахунок використання високонадійних конструктивних елементів вітчизняного виробництва. Причиннонаслідковий зв'язок між сукупністю суттєвих ознак та технічним результатом, що досягається, полягає в наступному. Введення датчиків кутових швидкостей, датчиків лінійних прискорювань корпусу літака відносно його головних центральних осей інерції, модулів типу М2 і M-HG і при цьому використання як реєстратора польотної інформації пристрою типу БУР-4-1-01, або будьякої з його подальших модифікацій, а також використання як блока збору польотної інформації блока збору польотної інформації типу БСИ-4-01 дозволяє підвищити точність оцінки дій льотчика та стану систем літака у процесі посадки. Недоліком такої системи є відсутність системи аналізу помилкових дій екіпажу. В основу корисної моделі поставлено задачу покращення бортової системи реєстрації та збереження польотної інформації шляхом додавання до неї пристрою для аналізу помилкових дій екіпажу. Поставлена задача вирішується пристроєм для аналізу помилкових дій екіпажу, який згідно з корисною моделлю, пристрої, які показують параметри польоту підключені до мультиплексора вводу поточних значень параметрів, який з'єднано з мікроконтролером, в який подається алгоритм потрібних параметрів управління, мікроконтролер підключений до демультиплексора виводу потрібних параметрів управління, який під'єднаний до індикатора потрібних значень параметрів управління. Аналіз помилкових дій екіпажу в жахливих ситуаціях польоту (ЖСП) дозволяє виявити основні джерела їх прояв, до яких належить: - професійні якості підготовки екіпажу; - злагодженість, організованість, зібраність, психологічна сумісність усього колективу; - своєчасність, достовірність та сервісні якості інформаційних систем, які подають конкретні дані для управління, що необхідно для управління та своєчасної адекватної реакції екіпажу в ЖСП; автоматизація управління польотом. Згідно з корисною моделлю, у кабіну літака встановлюється пристрій з LCD-дисплеєм, до пристрою через послідовний інтерфейс підключаються інші пристрої для передачі показань параметрів польоту, використовуючи даний пристрій виявлення помилок екіпажу, якщо параметри польоту відрізняються від потрібних, пристрій сигналізує про помилку екіпажу. З метою покращення умов управління екіпажем вводиться модель автоматизованої інтеграції необхідних параметрів польоту. Така система автоматичної підказки може забезпечити зручні умови роботи та суттєво підвищить ефективність управління в страшних ситуаціях польоту. Як правило, система управління заданим процесом функціонує відповідно визначеного закону, який можна описати детермінованою функцією y f t, x1, x 2 ... x n , (1) 1 UA 115486 U де t - час здійснення процесу управління; x i - значення параметрів управління, при цьому заданий потрібний алгоритм роботи системи управління у визначений момент часу t i z f t i x1 x 2 ... x n 5 10 15 (2) В процесі управління завжди необхідно, щоб в кожний момент часу t i параметри управління мали конкретне значення x io . xi Корисна модель працює наступним чином. Пристрої, які показують параметри польоту підключені до мультиплексора вводу поточних значень параметрів 1, який передає дані до мікроконтролера 2, в свою в свою чергу в мікроконтролер подається алгоритм 3, за яким вираховується значення потрібних параметрів управління, потім дані з мікроконтролера передаються до демультиплексора виводу потрібних параметрів управління Потрібне значення x io параметрів управляючого процесу можна визначити методом мінімізації функції Ri x1, x 2 ... x n , яка визначається для кожного моменту часу t i з заданим інтервалом t , який залежить від точності та швидкодії процесу управління. При цьому функція Ri x1, x 2 ... x n буде визначена модулем різниці в кожний момент часу t i . R i x1, x 2 ... x n t 1, x1, x 2 ... x n f t 1, x1, x 2 ... x n l, 20 25 30 35 (3) Якщо проводити мінімізацію функції Ri x1, x 2 ... x n для кожного моменту часу t i , то в ці моменти значення функцій f t1, x1, x 2 ... x n та t1, x1, x 2 ... x n будуть рівні з заданою точністю, а значення параметрів x i управління стануть дорівнювати тим значенням x io параметрів, які вимагаються, і які потрібно установити в системі управління для того, щоб система виконувала необхідну функцію t1, x1, x 2 ... x n в момент часу t i . Такий процес визначення вимагаємих параметрів x io , які вимагаються, можна здійснити з прогнозуванням на інтервал часу t t i1 t i . В арсеналах обчислювальної математики існує велике число способів мінімізації багатомірних функцій. Як правило, можна з впевненістю вважати, що багатомірна функція Ri x1, x 2 ... x n є полімодальною, тобто для кожного моменту часу t i функція має декілька мінімальних значень і задача мінімізації визначається у визначенні її глобального мінімального значення, при якому значення потрібних параметрів x io забезпечить найбільш ефективне управління системою. При невеликому часі N параметрів x i управління найбільш ефективним моментом пошуку мінімуму функції Ri x1, x 2 ... x n на випадок її складної поведінки (наявність багатьох локальних мінімумів) є метод Гауса-Зейделя. Ідея цього методу показана на фіг. 1 для двомірного варіанта функцій Ri x1, x 2 ... x n [1]. Область допустимих значень параметрів x1min , x1max , x 2 min , x 2 max розділяється на малі ділянки з інтервалом x i , здійснюється обчислення функції Ri x1, x 2 в заданому числі точок з кроком x i , і способом порівняння обчислюваних значень визначається глобальний мінімум 40 45 функції Ri x1, x 2 . Точність визначення точки глобального мінімуму залежить від щільності заповнення області D дискретною кількістю x1i , x 2i тобто залежить від інтервалу x i . При великому числі Т змінних x i необхідні будуть більші поточні затрати на виконання. Така умова може не забезпечити процес обчислення та управління в масштабі реального часу з заданим темпом t . При великому N може бути більш ефективним більш висока швидкодія. Алгоритм такого варіанта приведений на фіг. 2. Спочатку проводиться випадковий вибір початкової точки пошуку ПТП, як це показано на фіг. 3. Потім почергово разом зі зміною змінних x i з заданим кроком змінна x i змінюється доти, поки значення функції Ri x1, x 2 не збільшується, тоді алгоритм переключається на обчислення функції Ri x1, x 2 в залежності від зміни другої змінної x 2 . Такий процес почергово продовжується доти, поки не буде зафіксований локальний мінімум з 2 UA 115486 U 5 10 координатами x 01 , x 02 . Після цього випадково вибирається нова початкова точка ПТП і заново шукається локальний мінімум. Після кінцевого числа m локальних мінімумів, серед яких методом перебору неважко знайти глобальний мінімум відповідно до алгоритму, (фіг. 2). При великому числі Т параметрів управління x i алгоритм мінімізації з випадковою початковою точкою пошуку вважається більш ефективним по швидкодії, як це показано на фіг. 4. В зв'язку зі значним темпом розвитку обчислювальної мікропроцесорної техніки запропонований метод автоматизованого управління польотом може стати дуже ефективним при його реалізації. Як приклад розглянемо задачу розрахунку системи автоматизованого управління кутом рискання. Передаточна функція літака взята для випадку, коли враховують бокові сили: W p k x T1 p 1 2 Tk p 3 2y k Tk p 2 p , (4) Візьмемо p jw 15 W jw 1 jw k x T1 2 2y k Tk w 2 j w Tk w 3 , (5) Введемо позначення 2 a k x T1; b1 Tk ; b 2 2y k Tk , 20 (6) і тоді можна записати W jw ja w 1 b 2 w 2 j w b1w 3 , (7) Після нескладних, але трудомістких перетворень можна отримати формулу для визначення модуля W f амплітудно-частотні характеристики (АЧХ) літака 25 W t 1 4 f ab 2f b 4 f 1 4 2 f 2 a ab 2 4 2 ab1f 2 8 3 f 3b 2 2 2 2 2 1 2 2 2 2 b1 2 , (8) Формула (8) визначає реальну АЧХ управління системи. Для визначення необхідних параметрів a, b 1 та b 2 системи задається необхідна T f АЧХ роботи системи в реальних умовах польоту. Різницева функція zf a b1 b 2 визначається відповідно виразу: 30 35 40 za b1 b 2 Tf a b1 b 2 W f a b1 b 2 , (9) При цьому zf a b1 b 2 вже не буде залежати від частоти f , а буде в залежності від параметрів a, b 1 та b 2 адекватних роботі системи в реальних умовах польоту. Пошук глобального мінімуму багаторозмірної функції різниць za, b1, b 2 відповідно до параметрів a b1 b2 дозволяє визначити потрібні параметри a0 , b01, b02 системи управління в реальному масштабі часу з прогнозуванням на часовому інтервалу t . Таким чином, автоматична індикація параметрів, що вимагаються, керування польотами дозволяє: - суттєво полегшити роботу екіпажу, допомагаючи прийняти рішення, яке адекватне створеній ситуації: - забезпечити об'єктивні експертні оцінки екіпажу на тренажерах. 3 UA 115486 U 5 10 15 Джерела інформації: 1. Методы оптимизации. Вводный курс: Пер. С англ., - М.; Радио и связь, 1988. - 128 с. 2. Унгурян С.Г., Лупандин М.В. Расчет системы автоматического управления полётом самолёта. КИИГА, 1971. - 136 с. 3. Туник А.А., Блохин Л.Н., Кривоносенко А.П. Алгоритмы и программы анализа и оптимизации системы управления полётом. - Киев: КИИГА, 1988. - 80 с. 4. Дж. Бендат, А. Пирсол. Измерение и анализ случайных процессов. Пер. с англ. - М. Мир. 1974, - 460 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Пристрій для аналізу помилкових дій екіпажу, який відрізняється тим, що пристрої, які показують параметри польоту, підключені до мультиплексора вводу поточних значень параметрів, який з’єднано з мікроконтролером, в який подається алгоритм потрібних параметрів управління, мікроконтролер підключений до демультиплексора виводу потрібних параметрів управління, який під’єднаний до індикатора потрібних значень параметрів управління. 4 UA 115486 U 5 UA 115486 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B64D 43/00, B64D 43/02
Мітки: аналізу, помилкових, екіпажу, пристрій, дій
Код посилання
<a href="https://ua.patents.su/8-115486-pristrijj-dlya-analizu-pomilkovikh-dijj-ekipazhu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для аналізу помилкових дій екіпажу</a>
Система забезпечення безпеки екіпажу повітряного пункту керування
Номер патенту: 15944
Опубліковано: 17.07.2006
Автори: Куровська Тетяна Юріївна, Слєпов Лев Іванович, Соколовський Володимир Анатолійович
МПК: A62B 37/00
Мітки: забезпечення, безпеки, система, повітряного, керування, екіпажу, пункту
Формула / Реферат:
Система забезпечення безпеки екіпажу повітряного пункту керування, що містить індивідуальний парашут кожного члена екіпажу, яка відрізняється тим, що до нього запроваджено металевий контейнер, в якому розміщено пристрій керування, парашутна група, балони стислого повітря, робочі місця екіпажу повітряного пункту керування, катапульта і гальмівні реактивні двигуни, при цьому робочі місця екіпажу повітряного пункту керування з'єднані з пристроєм...
Пристрій безперервного діагностування технічного стану колісних пар залізничного екіпажу
Номер патенту: 37164
Опубліковано: 16.04.2001
Автори: Осенін Юрій Іванович, Голубенко Олександр Леонідович, Богданов Олексій Вікторович, Смірний Михайло Федорович
МПК: G08B 23/00
Мітки: діагностування, залізничного, стану, технічного, пристрій, екіпажу, пар, безперервного, колісних
Формула / Реферат:
Пристрій безперервного діагностування технічного стану колісних пар залізничного екіпажу, який складається з блоків сигналізації та блока управління і контролю, який відрізняється тим, що блоки сигналізації замінено магнітними мітками, які нанесені на колісний центр та бандаж, а також конструкцію доповнено датчиками-зчитувачами, які розташовано в кузовній частині та приєднано паралельно до блока управління й контролю.
Пристрій безперервного діагностування технічного стану колісних пар залізничного екіпажу
Номер патенту: 113599
Опубліковано: 10.02.2017
Автори: Поркуян Ольга Вікторівна, Марченко Дмитро Миколайович, Смірний Михайло Федорович
МПК: G08B 23/00
Мітки: діагностування, технічного, колісних, екіпажу, безперервного, пристрій, залізничного, пар, стану
Формула / Реферат:
Пристрій безперервного діагностування технічного стану колісних пар залізничного екіпажу, що містить блок управління та контролю, магнітні мітки, нанесені на колісний центр та бандаж, датчик-зчитувач, розташований на кузовній частині, який відрізняється тим, що як магнітні мітки застосовано формувачі імпульсів, виконані у вигляді сталевих пластин, прикріплених на колісному центрі та бандажі, а як датчик-зчитувач застосовано перетворювачі...
Пристрій безперервного діагностування технічного стану колісних пар залізничного екіпажу
Номер патенту: 34828
Опубліковано: 15.03.2001
Автори: Богданов Олександр Вікторович, Осенін Юрій Іванович
МПК: G08B 23/00
Мітки: технічного, екіпажу, стану, діагностування, залізничного, пар, пристрій, колісних, безперервного
Формула / Реферат:
Пристрій безперервного діагностування технічного стану колісних пар залізничного екіпажа, який складається з блоків сигналізації, блока управління й контролю, який відрізняється тим, що сигнал про порушення технічного стану колісної пари передасться безконтактне, для цього, в пристрої передбачені блоки сигналізації, встановлені на колісні диски, кожен з яких складається із датчика для реєстрації взаємних переміщень елементів нероз'ємних...
Пристрій життєзабезпечення екіпажу танка під час подолання водної перешкоди
Номер патенту: 8053
Опубліковано: 15.07.2005
Автори: Лиженко Михайло Анатолійович, Момот Роман Анатолійович, Хаспеков Микола Іванович
МПК: F41H 7/02, G08B 21/00
Мітки: пристрій, подолання, перешкоди, життєзабезпечення, водної, екіпажу, танка
Формула / Реферат:
Пристрій життєзабезпечення екіпажу танка під час подолання водної перешкоди, що має датчик розрідження, механізм зупинки двигуна, блок сигналізації про розрідження, блок вирівнювання тиску повітря всередині танка, другий датчик розрідження, блок затримки, транзисторний ключ, підсилювач постійного струму, блок сигналізації про надходження води в трубу, електроди датчика потоку води в трубі, брезентовий рукав, який відрізняється тим, що...
Попередній патент: Спосіб лікування раку у дорослих та пригнічення росту злоякісної пухлини у дітей
Наступний патент: Комп’ютеризований електронний тематичний модуль з різнорівневою рейтинговою самооцінкою/оцінкою знань
Випадковий патент: Зворотний вузол з'єднання гнучких елементів нижнього пояса структурно-вантового покриття