Автоматизована система керування вогнем мобільного мінометного комплексу
Номер патенту: 117956
Опубліковано: 10.07.2017
Автори: Довбиш Анатолій Степанович, Житник Віктор Євгенович, Раскошний Андрій Федорович, Ляпа Микола Миколайович, Будник Микола Миколайович, Макеєв Василь Ілліч, Ярема Микола Григорович
Формула / Реферат
Автоматизована система керування вогнем мобільного мінометного комплексу, яка складається з засобів керування, що містять пульт керування командира, керуючий і виконуючий пристрої горизонтального наведення, керуючий і виконуючий пристрої вертикального наведення, з засобів балістичного забезпечення, засобів зв'язку у вигляді цифрового каналу, яка відрізняється тим, що засоби керування додатково містять комп'ютер з системою підтримки прийняття рішень (СППР), керуючий і виконуючий пристрої встановлення об'єкта керування (міномета) на поверхню землі, лампу-сигналізатор встановлення міномета на поверхню місцевості, блок гіроскопічних датчиків рівня (БГДР) плити міномета, індикатор кута відхилення плити об'єкта керування від площини горизонту в поздовжній та поперечній площинах, датчики кутів горизонтального та вертикального наведення ствола міномета, індикатори відображення кутів горизонтального та вертикального наведення ствола міномета, засіб визначення дальності у вигляді лазерного далекоміра, засоби визначення дирекційного кута у вигляді бусолі з гіроскопічною насадкою, а засоби балістичного забезпечення виконані у вигляді балістичної станції та термометра для вимірювання температури зарядів, крім того, автоматизована система керування вогнем мобільного мінометного комплексу також містить засіб топогеодезичного забезпечення у вигляді блока навігаційної апаратури та засіб метеорологічного забезпечення у вигляді мобільної метеостанції з безпровідним інтерфейсом, при цьому комп'ютер, зі встановленою в ньому системою підтримки прийняття рішень, входами-виходами з'єднаний з виходами-входами цифрових каналів зв'язку, виходами-входами блока навігаційної апаратури, інші входи з'єднані з виходами метеостанції, балістичної станції та датчиком температури, вхід комп'ютера з'єднаний з виходом блока гіроскопічних датчиків рівня плити міномета, який з'єднаний з індикаторами кута відхилення плити об'єкта керування від площини горизонту в поздовжній та поперечній площинах, комп'ютер іншими входами-виходами з'єднаний з виходами-входами пульта керування командира мобільного мінометного комплексу, другий вихід пульта керування з'єднаний з входом керуючого пристрою, вихід якого з'єднаний з входом виконуючого пристрою встановлення об'єкта керування на поверхню землі, який з'єднаний з лампою сигналізатором встановлення міномета на поверхню місцевості, яка з'єднана з комп'ютером, третій та четвертий виходи пульта керування з'єднані з входами керуючих пристроїв вертикального та горизонтального наведення, виходи з яких з'єднані з входами виконуючих пристроїв та вертикального та горизонтального наведення міномета відповідно, виходи датчиків відхилень ствола міномета від горизонтальної та вертикальної площини з'єднані з входами комп'ютера і, окрім того, з'єднані з індикаторами відображення кутів горизонтального і вертикального наведення ствола міномета, входи-виходи засобів визначення дальності та дирекційного кута цілі з'єднані через цифрові канали зв'язку з виходами-входами комп'ютера.
Текст
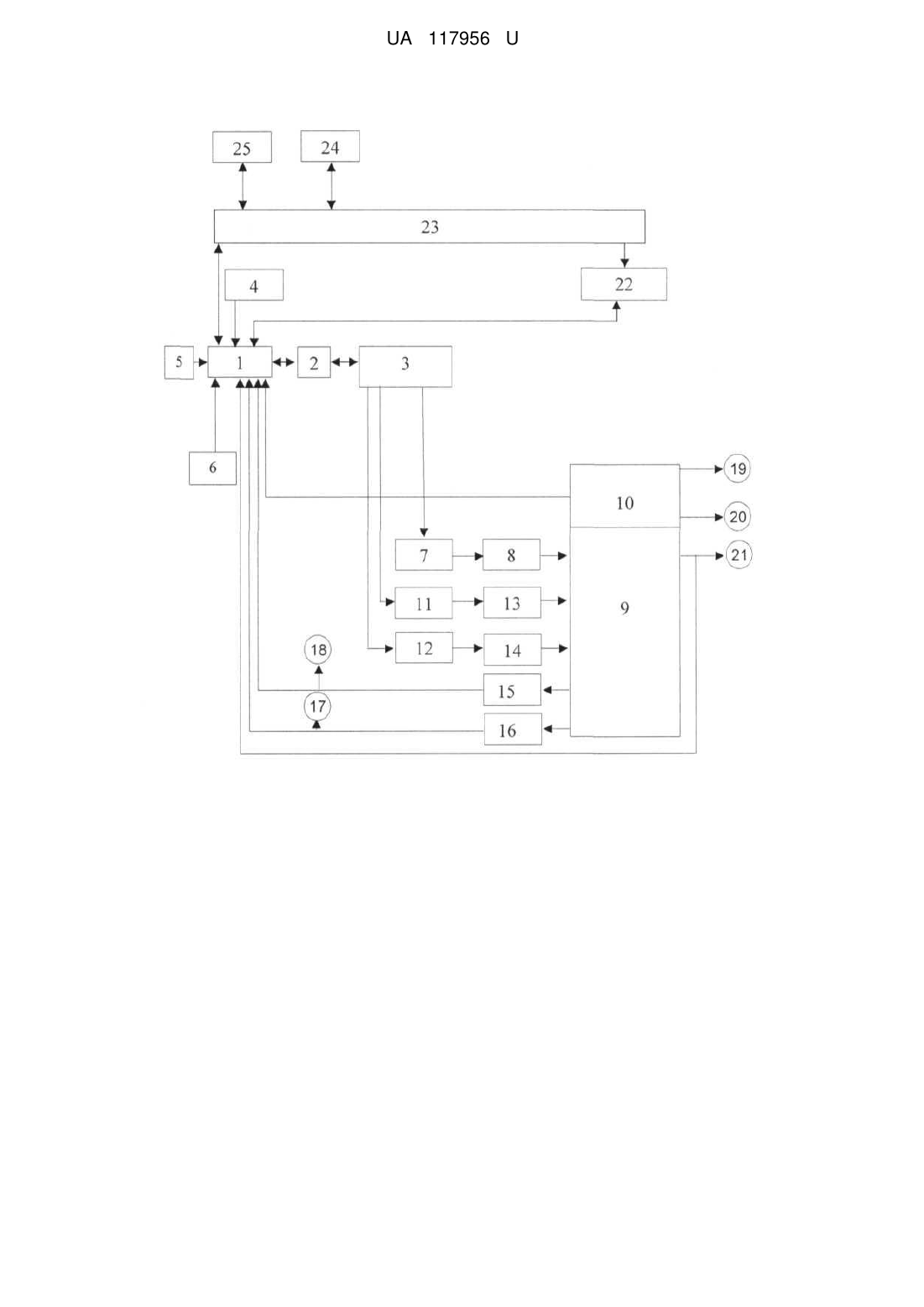
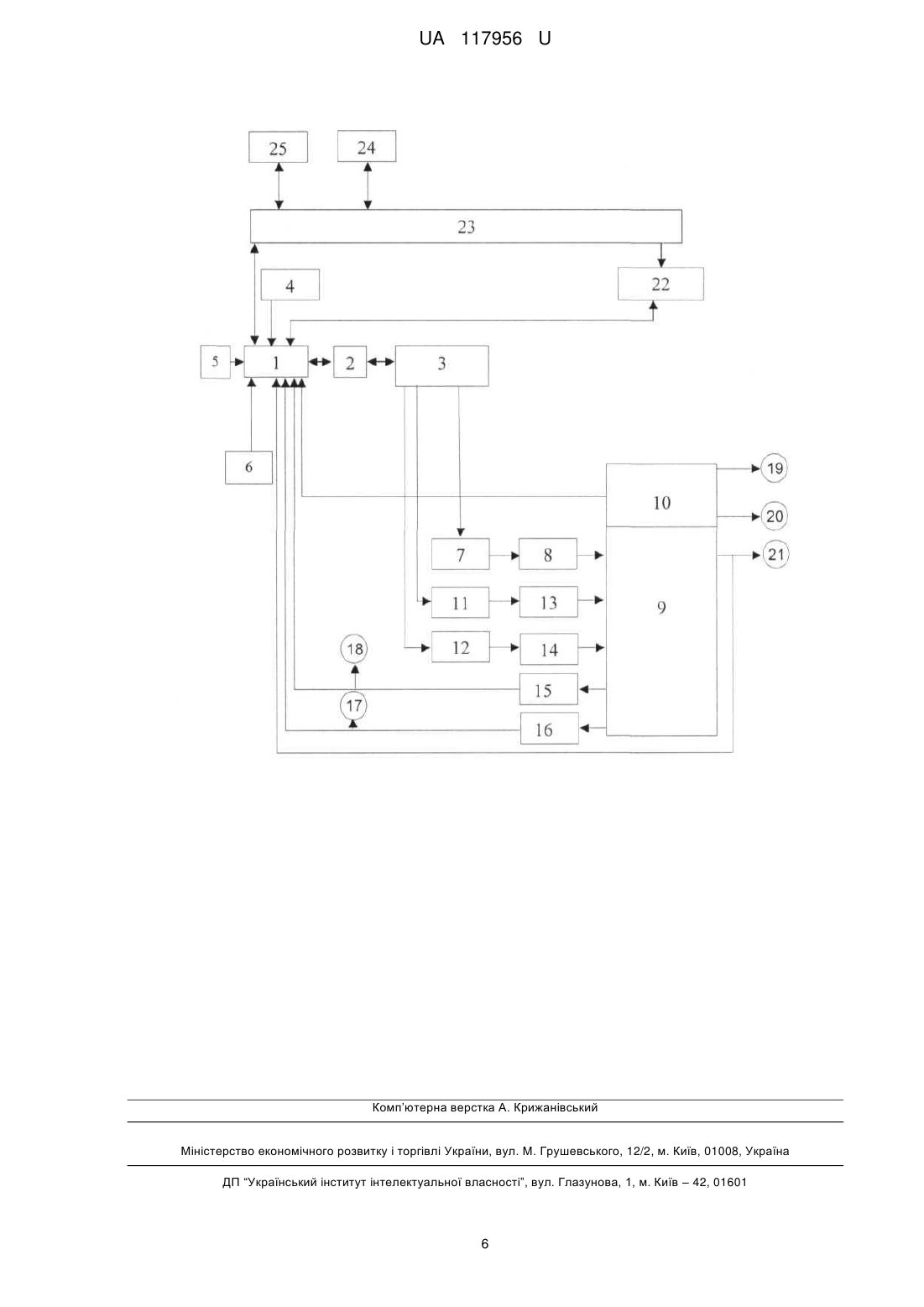
Реферат: Автоматизована система керування вогнем мобільного мінометного комплексу складається з засобів керування, що містять пульт керування командира, керуючий і виконуючий пристрої горизонтального наведення, керуючий і виконуючий пристрої вертикального наведення, з засобів балістичного забезпечення, засобів зв'язку у вигляді цифрового каналу. Засоби керування додатково містять комп'ютер з системою підтримки прийняття рішень (СППР), керуючий і виконуючий пристрої встановлення об'єкта керування (міномета) на поверхню землі, лампу-сигналізатор встановлення міномета на поверхню місцевості, блок гіроскопічних датчиків рівня (БГДР) плити міномета, індикатор кута відхилення плити об'єкта керування від площини горизонту в поздовжній та поперечній площинах, датчики кутів горизонтального та вертикального наведення ствола міномета, індикатори відображення кутів горизонтального та вертикального наведення ствола міномета, засіб визначення дальності у вигляді лазерного далекоміра, засоби визначення дирекційного кута у вигляді бусолі з гіроскопічною насадкою. Засоби балістичного забезпечення виконані у вигляді балістичної станції та термометра для вимірювання температури зарядів. Автоматизована система керування додатково має засіб топогеодезичного забезпечення у вигляді блока навігаційної апаратури та засіб метеорологічного забезпечення у вигляді мобільної метеостанції з безпровідним інтерфейсом. UA 117956 U (12) UA 117956 U UA 117956 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі військової техніки, зокрема до області автоматизованих систем керування (АСК) озброєнням, а саме призначена для використання в складі мобільного мінометного комплексу (ММК). Існуючі неавтоматизовані засоби наведення та підготовки вогню, наприклад в самохідній гарматі 2С9 "Нона" [1], містять оптичний прицільний пристрій, приводи наведення, радіостанцію для приймання-передавання даних. Для підготовки вогню вибирається вогнева позиція, здійснюється її топогеодезична прив'язка, а саме визначення координат, висоти та закріплення на місцевості орієнтирних напрямків за відомим дирекційним кутом. Координати вогневої позиції каналом зв'язку передаються в машину управління, де для заданих координат цілі (точки прицілювання) проводиться розрахунок установок для стрільби (кутів вертикального та горизонтального наведення. Розраховані дані передаються командиру гармати через радіостанцію. Навідник гармати вводить кути наведення в оптичний прицільний пристрій і за допомогою приводів наведення наводить ствол гармати, використовуючи прицільні пристрої і раніше створений орієнтирний напрямок. Недоліки такого підходу загальновідомі - тривале перебування на вогневій позиції знижує живучість гармати, а ручне наведення знижує точність стрільби. Тому для керування вогнем артилерійського озброєння було створено ряд АСК, наприклад розкриті в корисних моделях UA 39054 та UA 83793 [2-3]. Наприклад у винаході UA 32632 (із) [4] розкрито систему керування вогнем танка, що містить денний приціл з незалежною стабілізацією дзеркала, нічний приціл з дзеркалом і кінематично з'єднані гармату та датчик кутів вертикального наведення, який кінематично зв'язаний з дзеркалом денного прицілу, балістичний обчислювач (БО), підключений до приводу наведення гармати, до першого та другого входів якого підключені відповідно датчик кутів вертикального наведення та денний приціл, яка відрізняється тим, що в неї введені датчик кутового розходження нічного прицілу з гарматою, блок керування, зв'язаний першим входом з датчиком кутового розходження, другим входом - з датчиком кутів ВН, а третім входом - з приводом наведення гармати. Недоліком цих систем є те, що вони використовуються тільки для ураження цілей, які спостерігаються через прицільні пристрої. За прототип вибрано винахід UA 105589 [5], згідно з яким АСК вогнем бойової машини містить пульт командира, пульт оператора, цифровий канал зв'язку, пульт керування (ПК) командира, відеооглядовий пристрій командира, блок управління, приціл навідника, автомат супроводу об'єктів теплотелевізійний балістичний обчислювач (БО), датчики системи керування вогнем, стабілізатор озброєння та систему вимірювання координат. При цьому БО з'єднаний із стабілізатором озброєння, який з'єднаний також з прицілом навідника, пультом оператора, блоком управління та з цифровим каналом зв'язку, а другий та третій виходи стабілізатора озброєння є виходами відповідно каналів вертикального та горизонтального наведення гармати, в систему додатково введені трикоординатний датчик лінійних прискорень та блок розрахунку змін орієнтації корпусу, при цьому трикоординатний датчик встановлений на корпусі бойової машини та з'єднаний з входом блока розрахунку змін орієнтації корпусу, вихід якого з'єднаний з п'ятим входом блока управління, а вхід-вихід з'єднаний з цифровим каналом зв'язку. Недоліком цієї системи, як і вищезазначених є те що всі аналоги призначені, в основному, для стрільби прямою наводкою, а мінометний комплекс виконує вогневі завдання з закритої вогневої позиції та напівпрямим наведенням. Таким чином, на сьогодні відсутня спеціалізована АСК для міномета, а недоліками існуючих засобів наведення і управління вогнем артилерії є: – неавтономне функціонування гармати (розрахунок установок для стрільби в машині управління, попередня топогеодезична підготовка вогневої позиції); – зниження живучості гармати через необхідність її тривалого перебування на вогневої позиції (приведення в бойове положення гармати та прицільного пристрою, ручне наведення, контроль правильності наведення командиром зводу); – значний час підготовки до відкриття вогню (14-21 хвилин [6]); – значна кількість ручних операцій. В основу корисної моделі поставлено задачу удосконалити АСК вогнем міномета, який перевозиться автомобільною технікою та розгортається в бойове положення на поверхні ґрунту шляхом введення в систему сучасних засобів забезпечення керування, що підвищить живучість міномета, зменшить кількість ручних операцій шляхом застосування безприцільного наведення ствола міномета, забезпечить автономне керування мінометом, а також скоротить час підготовки до відкриття та підвищить точність вогню, в результаті ймовірність ураження цілі стане більшою. Поставлена задача вирішується тим, що автоматизована система керування вогнем мобільного мінометного комплексу, яка складається з засобів керування, що містять пульт 1 UA 117956 U 5 10 15 20 25 30 35 40 45 50 55 60 керування командира, керуючий і виконуючий пристрої горизонтального наведення, керуючий і виконуючий пристрої вертикального наведення, з засобів балістичного забезпечення, з засобів зв'язку у вигляді цифрового каналу, відповідно до корисної моделі, засоби керування додатково містять комп'ютер з системою підтримки прийняття рішень (СППР), керуючий і виконуючий пристрої встановлення об'єкта керування (міномета) на поверхню землі, лампу-сигналізатор встановлення міномета на поверхню місцевості, блок гіроскопічних датчиків рівня (БГДР) плити міномета, індикатор кута відхилення плити об'єкта керування від площини горизонту в поздовжній та поперечній площинах, датчики кутів горизонтального та вертикального наведення ствола міномета, індикатори відображення кутів горизонтального та вертикального наведення ствола міномету, засіб визначення дальності у вигляді лазерного далекоміра, засоби визначення дирекційного кута у вигляді бусолі з гіроскопічною насадкою, а засоби балістичного забезпечення виконані у вигляді балістичної станції та термометра для вимірювання температури зарядів, крім того, автоматизована система керування вогнем мобільного мінометного комплексу також містить засіб топогеодезичного забезпечення у вигляді блоку навігаційної апаратури, та засіб метеорологічного забезпечення у вигляді мобільної метеостанції з безпровідним інтерфейсом, при цьому комп'ютер, з встановленою в ньому системою підтримки прийняття рішень, входами-виходами з'єднаний з виходами-входами цифрових каналів зв'язку, виходами-входами блока навігаційної апаратури, інші входи з'єднані з виходами метеостанції, балістичної станції та датчиком температури, вхід комп'ютера з'єднаний з виходом блока гіроскопічних датчиків рівня плити міномета, який, крім того, з'єднаний з індикаторами кута відхилення плити об'єкта керування від площини горизонту в поздовжній та поперечній площинах, комп'ютер іншими входами-виходами з'єднаний через систему підтримки прийняття рішень з виходами-входами пульта керування командира мобільного мінометного комплексу, другий вихід пульта керування з'єднаний з входом керуючого пристрою, вихід якого з'єднаний з входом виконуючого пристрою встановлення об'єкта керування на поверхню землі, який з'єднаний з лампою сигналізатором встановлення міномета на поверхню місцевості, яка з'єднана з комп'ютером, третій та четвертий виходи пульта керування з'єднані з входами керуючих пристроїв вертикального та горизонтального наведення, виходи з якихз'єднані з входами виконуючих пристроїв та вертикального та горизонтального наведення міномета відповідно, виходи датчиків відхилень ствола міномета від горизонтальної та вертикальної площини з'єднані з входами комп'ютера і, окрім того, з'єднані з індикаторами відображення кутів горизонтального і вертикального наведення ствола міномета, входи-виходи засобів визначення дальності та дирекційного кута цілі з'єднані через цифрові канали зв'язку з виходами-входами комп'ютера. Технічний результат пропонованої АСК вогнем міномета, що заявляється забезпечується тим, що: – в результаті застосування СППР, яка забезпечує вирішення задачі автономного керування вогнем ММК на ураження цілі та навігаційної апаратури GPS/INS для визначення поточних координат, висоти та дирекційного кута осі бойової машини ММК підготовка до відкриття вогню, що включає розрахунок установок для стрільби, топогеодезичну прив'язку вогневої позиції, здійснюється автономно (без використання машини управління і топоприв'язувача), що підвищує живучість; – в результаті застосування СППР, яка забезпечує вирішення задачі автономного керування вогнем ММК на ураження цілі, навігаційної апаратури GPS/INS для визначення поточних координат, висоти та дирекційного кута осі бойової машини ММК та захищених цифрових каналів зв'язку які забезпечують отримання та передачу розпоряджень, команд та доповідей, керуючих та виконуючих пристроїв переведення в бойове положення та наведення міномета, що забезпечує безприцільне наведення ствола міномета з часу підготовки до відкриття вогню виключається час попередньої топогеодезичної прив'язки вогневої позиції, час розрахунку на машині управління і передачі на ММК установок для стрільби та час наведення міномета за рахунок виключення ручних операцій роботи з оптичним прицільним пристроєм та механізмами наведення і виходу членів екіпажу з кабіни ММК для роботи з ними в результаті скорочується час готовності до відкриття вогню; – в результаті застосування засобів визначення дальності до цілі та дирекційного кута цілі, СППР, яка забезпечує врахування метеорологічних та балістичних умов стрільби та вирішення задачі автономного керування вогнем ММК на ураження цілі, захищених цифрових каналів зв'язку, які забезпечують отримання та передачу розпоряджень, команд та доповідей, керуючих та виконуючих пристроїв переведення в бойове положення та наведення міномета, що забезпечує безприцільне наведення ствола міномета виключаються можливі суб'єктивні помилки командира та навідника під час отримання та визначення установок для стрільби, 2 UA 117956 U 5 10 15 20 25 30 35 40 45 50 55 60 введення значень заданих кутів наведення в прицільний пристрій, наведення ствола міномета за допомогою оптичного прицільного пристрою, в результаті підвищується точність вогневого ураження цілі; – в результаті застосування СППР, яка забезпечує вирішення задачі автономного керування вогнем ММК на ураження цілі, навігаційної апаратури GPS/INS для визначення координат, висоти та дирекційного кута осі бойової машини ММК, керуючих та виконуючих пристроїв наведення, що забезпечує безприцільне наведення ствола міномета (забезпечується можливість наведення ствола в умовах недостатньої видимості: сильний дощ, сніг, туман), в результаті підвищується ймовірність ураження цілі. Таким чином, у пропонованому пристрої реалізуються нові можливості: 1) наскрізна автоматизація управління вогнем ММК, 2) забезпечується тактична автономність ММК, за рахунок автономного розрахунку установок для стрільби та навігації, у тому числі за допомогою супутникових навігаційних систем, 3) підвищення живучості за рахунок мінімального часу знаходження ММК на вогневій позиції та ведення вогню з будь-якої вогневої позиції з можливістю її зміни між пострілами (чергами). 5) можуть використовуватися системи автономного орієнтування і одометричної навігації, що застосовуються у відомих топоприв'язувачах. 6) значно зменшується кількість ручних операцій за рахунок безприцільного наведення ствола міномета. Таким чином, АСК вогнем ММК, що заявляється, відповідає критерію "новизна". На кресленні зображена блок-схема автоматизованої системи керування вогнем мобільного мінометного комплексу: Автоматизована система керування вогнем мобільного мінометного комплексу містить: 1 комп'ютер; 2 - система підтримки прийняття рішень (СППР); 3 - пульт керування (ПК); 4 метеостанція (МС); 5 - балістична станція (БС); 6 - датчик температури; 7 - керуючий пристрій (КП) (мікроконтролер) встановлення об'єкта керування на поверхню землі; 8 - виконуючий пристрій (ВП) встановлення об'єкта керування на поверхню землі; 9 - об'єкт керування (ОК) (міномет); 10 - блок гіроскопічних датчиків рівня (БГДР) плити міномета; 11 - керуючий пристрій горизонтального наведення (ГН) (мікроконтролер); 12 - керуючий пристрій вертикального наведення (ВН) (мікроконтролер); 13 - виконуючий пристрій ГН, 14 - виконуючий пристрій ВН; 15 і 16 - датчики кутів горизонтального та вертикального наведення ствола міномета; 17 індикатор відображення кута ГН ствола міномета; 18 - індикатор відображення кута ВН ствола міномета; 19 - індикатор кута відхилення плити ОК від площини горизонту в поздовжній площині; 20 - індикатор кута відхилення плити ОК від площини горизонту в поперечній площині; 21 - лампа-сигналізатор (ЛС) встановлення міномета на поверхню місцевості; 22 - блок навігаційної апаратури (БНА); 23 - цифрові канали зв'язку; 24 - засоби визначення дальності до цілі; 25 - засіб визначення дирекційного кута цілі. Автоматизована система керування вогнем мобільного мінометного комплексу містить комп'ютер 1, зі встановленою в ньому СППР 2, входами-виходами з'єднаний з виходамивходами цифрових каналів зв'язку 23, виходами-входами БНА 22, інші входи з'єднані з виходами МС 4, БС 5 та датчиком температури 6, вхід комп'ютера 1, з'єднаний з виходом БГДР 10 плити міномета, який, крім того, з'єднаний з індикаторами 19, 20 кута відхилення плити об'єкта керування від площини горизонту в поздовжній та поперечній площинах, комп'ютер 1 іншими входами-виходами з'єднаний з виходами-входами ПК 3 командира мобільного мінометного комплексу, другий вихід ПК 3 з'єднаний з входом КП 7 встановлення ОК на поверхню землі, вихід якого з'єднаний з входом ВК 8 встановлення ОК на поверхню землі, який з'єднаний з ЛС 21 встановлення міномета на поверхню місцевості, яка з'єднана з комп'ютером 1, третій та четвертий виходи ПК 3 з'єднані з входами керуючих пристроїв ГН 11 та ВН 12, виходи яких з'єднані з входами виконуючого пристрою ГН 13 і ВН 14 міномета відповідно, виходи датчиків 15, 16 кутів горизонтального та вертикального наведення ствола міномета з'єднані з входами комп'ютера 1, і окрім того, з'єднані з індикаторами 17, 18 відображення кутів ГН і ВН ствола міномета відповідно, входи-виходи засобів 24, 25 визначення дальності до цілі та дирекційного кута цілі з'єднані через цифрові канали 23 зв'язку з виходами-входами комп'ютера 1. Автоматизована система керування вогнем мобільного мінометного комплексу працює наступним чином. До комп'ютера 1, в якому реалізована СППР 2 надходять метеорологічні дані з МС 4, балістичні дані з БС 5, дані про температуру зарядів в контейнері з датчиків 6 температури і координати розташування і висота, дирекційний кут осі ММК з БНА 22. До комп'ютера 1, також 3 UA 117956 U 5 10 15 20 25 30 35 40 45 50 55 60 надходять розвіддані від засобу 24 визначення дальності та дані від засобу 25 визначення дирекційного кута цілі через цифрові канали 23 зв'язку. Крім того, особа, що приймає рішення (ОПР) через ПК 3 командира вводить в комп'ютер 1 розвіддані, команди та розпорядження командування отримані через захищені цифрові канали 23 зв'язку. Після отримання команди на ураження цілі ОПР через ПК 3 командира посилає команду на розгортання міномета, яка через КП 7 (мікроконтролер) встановлення ОК на поверхню землі подається на ВП 8 встановлення ОК на поверхню землі для встановлення ОК 9, тобто міномета на поверхню землі. Завдання керуючих пристроїв полягає у керуванні роботою виконуючих пристроїв з оптимізацією їх кінематичних та динамічних характеристик (швидкість, сила, момент дії та інше). Крім того, на основі інформації про ціль та ММК, отриманого завдання, СППР 2 розраховує значення необхідних кутів горизонтального і вертикального наведення та інші дані, необхідні для ураження цілі, які відображаються індикаторами на ПК 3 командира. У момент встановлення ОК 9 на поверхню землі загорається ЛС 21 встановлення міномета на поверхню землі і з БГДР 10 плити міномета в комп'ютер 1 для корекції балістичних розрахунків подаються сигнали кутів відхилень плити ОК 9 від площини горизонту відповідно в поздовжній та поперечній площинах (відносно осі бойової машини). Одночасно зазначені кути відображаються індикаторами 19, 20 відхилень плити ОК 9 від площини горизонту в поздовжній та поперечній площинах відповідно на ПК 3. На основі скоригованих балістичних розрахунків комп'ютер 1 через СППР 2 видає оптимальні керуючі сигнали для наведення ОК 9 в горизонтальній і вертикальній площинах, які відображаються на ПК 3 командира. Скориговані команди надходять з ПК 3 командира на керуючий пристрій ГН 11 і керуючий пристрій ВН 12 міномета, які приводять в дію виконуючі пристрої ГН 13 і виконуючі пристрої ВН 14 відповідно. У зворотному зв'язку кола керування механічним приводом на кресленні показано датчики 15 і 16 кутів горизонтального та вертикального наведення ствола міномета, значення відхилень відображаються індикаторами 17, 18 на ПК 3 командира та надходять в комп'ютер 1. Після досягнення необхідних кутів наведення припиняють роботу виконавчі пристрої 13 та 14 і на ПК 3 командира виводиться доповідь про готовність до ведення вогню. СППР реалізована у вигляді пакета програм, який включає щонайменше програмуоболонку, інші програми та яка забезпечує вирішення задачі автономного керування вогнем ММК на ураження цілі. СППР 2 знаходиться в комп'ютері 1, в основній реалізації застосовують портативний комп'ютер типу ноутбук чи планшет. В іншій реалізації застосовують спеціалізований комп'ютер військового виконання із підвищеними показниками механічної міцності, водонепроникності, захисту від температури, радіації та інших небезпечних факторів поля бою, засобами захисту інформації з обмеженим доступом чи секретної інформації, включаючи засоби фізичного знищення для уникнення несанкціонованого доступу до зазначеної інформації. Це може бути "спеціалізований комп'ютер для обробки даних" (див. Каталог продукції Укроборонпрому на 20016-2017 роки, с. 184) чи інший подібний пристрій. Як навігаційну систему застосовують навігаційну систему СН-3210 чи індивідуальний навігатор для систем навігації GPS та ГЛОНАСС СН-3003 [див. Каталог продукції Укроборонпрому на 20016-2017 роки, с 186 2014] чи інший подібний пристрій. В основній реалізації передбачається, що ММК оснащено гідравлічним приводом для розгортання та наведення міномета, а тому всі виконуючі пристрої є елементами гідравлічного приводу, наприклад золотниками гідроциліндрів. Проте, дана корисна модель цим не обмежена, механічний привід може бути пневматичним, електричним чи іншого типу. Таким чином, пропонована АСК вогнем забезпечує виконання повного циклу керування вогнем ММК за допомогою СППР, датчиків, керуючих та виконуючих пристроїв для забезпечення ураження цілі. Апаратну частину виконують з відомих для сучасного рівня техніки електронних та електротехнічних компонент, датчиків та механічних вузлів та приводів. Для створення ПЗ застосовують стандартні інструментальні пакети на основі відомих мов програмування. Таким чином, АСК вогнем для ММК, що заявляється, відповідає критерію "промислова придатність", тому що згідно з формулою та описом підтверджується можливість його здійснення за допомогою вказаних або відомих засобів і методів. Джерела інформації: 1. 120-мм Самоходное артиллерийское орудие 2С9: техническое описание и инструкция по эксплуатации. - М.: Воениздат, 1986, 160 с. 2. Патент на кор. модель UA 39054, F41G 5/00, Комплекс керування вогнем, Гутніченко Є., Сіренко С, Заозерський В., Мошнін В., Шигін Я., Лежньов С, 2009. 4 UA 117956 U 5 3. Патент на кор. модель UA 83793, F41G 5/00, Інтегрована система пошуку, наведення, стабілізації та керування вогнем "Триада-БТ", Пиронер Я., Яновський Ю., Баранчук О., Цисарж В., Долеско А., Стецюк В., 2013. 4. Патент на винахід UA 32632 (із), F41G 5/00, Система керування вогнем танка, Руденко М., Фролов Л., Бусяк Ю., ХКБМ ім. О. Морозова, 2001. 5. Патент на винахід UA 105589, F41G 3/00, F41G 5/00, Автоматизована система керування вогнем бойової машини, Руденко М., Фролов Л., Бусяк Ю., ХКБМ ім. О. Морозова, 2014. 6. Збірник нормативів з бойової підготовки для спеціалістів і підрозділів артилерії. - К.: "Варта", 2006, 127 с. 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 30 35 40 45 Автоматизована система керування вогнем мобільного мінометного комплексу, яка складається з засобів керування, що містять пульт керування командира, керуючий і виконуючий пристрої горизонтального наведення, керуючий і виконуючий пристрої вертикального наведення, з засобів балістичного забезпечення, засобів зв'язку у вигляді цифрового каналу, яка відрізняється тим, що засоби керування додатково містять комп'ютер з системою підтримки прийняття рішень (СППР), керуючий і виконуючий пристрої встановлення об'єкта керування (міномета) на поверхню землі, лампу-сигналізатор встановлення міномета на поверхню місцевості, блок гіроскопічних датчиків рівня (БГДР) плити міномета, індикатор кута відхилення плити об'єкта керування від площини горизонту в поздовжній та поперечній площинах, датчики кутів горизонтального та вертикального наведення ствола міномета, індикатори відображення кутів горизонтального та вертикального наведення ствола міномета, засіб визначення дальності у вигляді лазерного далекоміра, засоби визначення дирекційного кута у вигляді бусолі з гіроскопічною насадкою, а засоби балістичного забезпечення виконані у вигляді балістичної станції та термометра для вимірювання температури зарядів, крім того, автоматизована система керування вогнем мобільного мінометного комплексу також містить засіб топогеодезичного забезпечення у вигляді блока навігаційної апаратури та засіб метеорологічного забезпечення у вигляді мобільної метеостанції з безпровідним інтерфейсом, при цьому комп'ютер, зі встановленою в ньому системою підтримки прийняття рішень, входамивиходами з'єднаний з виходами-входами цифрових каналів зв'язку, виходами-входами блока навігаційної апаратури, інші входи з'єднані з виходами метеостанції, балістичної станції та датчиком температури, вхід комп'ютера з'єднаний з виходом блока гіроскопічних датчиків рівня плити міномета, який з'єднаний з індикаторами кута відхилення плити об'єкта керування від площини горизонту в поздовжній та поперечній площинах, комп'ютер іншими входами-виходами з'єднаний з виходами-входами пульта керування командира мобільного мінометного комплексу, другий вихід пульта керування з'єднаний з входом керуючого пристрою, вихід якого з'єднаний з входом виконуючого пристрою встановлення об'єкта керування на поверхню землі, який з'єднаний з лампою сигналізатором встановлення міномета на поверхню місцевості, яка з'єднана з комп'ютером, третій та четвертий виходи пульта керування з'єднані з входами керуючих пристроїв вертикального та горизонтального наведення, виходи з яких з'єднані з входами виконуючих пристроїв та вертикального та горизонтального наведення міномета відповідно, виходи датчиків відхилень ствола міномета від горизонтальної та вертикальної площини з'єднані з входами комп'ютера і, окрім того, з'єднані з індикаторами відображення кутів горизонтального і вертикального наведення ствола міномета, входи-виходи засобів визначення дальності та дирекційного кута цілі з'єднані через цифрові канали зв'язку з виходами-входами комп'ютера. 5 UA 117956 U Комп’ютерна верстка А. Крижанівський Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: мобільного, мінометного, система, автоматизована, керування, комплексу, вогнем
Код посилання
<a href="https://ua.patents.su/8-117956-avtomatizovana-sistema-keruvannya-vognem-mobilnogo-minometnogo-kompleksu.html" target="_blank" rel="follow" title="База патентів України">Автоматизована система керування вогнем мобільного мінометного комплексу</a>
Автоматизована система керування вогнем бойової машини
Номер патенту: 105589
Опубліковано: 26.05.2014
Автори: Гринькович Орест Степанович, Лапицький Сергій Володимирович, ОЛІЯРНИК БОГДАН ОЛЕКСІЙОВИЧ, Оліярник Олексій Богданович
Мітки: бойової, система, автоматизована, машини, керування, вогнем
Формула / Реферат:
Автоматизована система керування вогнем бойової машини, що містить пульт командира, який входами-виходами з'єднаний з виходами-входами пульта оператора, інші входи-виходи якого з'єднані з цифровим каналом зв'язку, пульт керування командира, вхід якого з'єднаний з виходом відеооглядового пристрою командира, а перший та другий виходи відповідно з'єднані з першим входом відеооглядового пристрою командира та першим входом блока управління,...
Система керування вогнем танка
Номер патенту: 51805
Опубліковано: 16.12.2002
Автори: Фролов Леонід Андрійович, Бондаренко Олександр Григорович
МПК: F41G 5/00
Мітки: танка, керування, система, вогнем
Формула / Реферат:
Система керування вогнем танка, що містить привід башти, привід гармати, датчик кутового положення гармати, жорстко установлений на башті і кінематично зв'язаний з гарматою, приціл, датчик кута вертикального наведення і датчик кута горизонтального наведення, які кінематично зв'язані з прицілом і відповідно з гарматою і баштою, а датчик кута вертикального наведення електрично зв'язаний з приводом гармати, яка відрізняється тим, що в систему...
Система керування вогнем танка
Номер патенту: 51830
Опубліковано: 16.12.2002
Автори: Мошнін Віктор Миколайович, Бондаренко Олександр Григорович, Хандога Анатолій Максимович, Єрдаков Євген Володимирович
МПК: F41G 5/00
Мітки: керування, система, танка, вогнем
Формула / Реферат:
Система керування вогнем танка, що містить привід башти, привід гармати, приціл, який складається з пульта керування, з'єднаного з приводом дзеркала прицілу, датчика кута вертикального наведення, датчика кута горизонтального наведення, які кінематично зв'язані з дзеркалом прицілу і відповідно з гарматою і баштою, балістичний обчислювач, блок керування приводами, гіротахометр вертикального наведення і гіротахометр горизонтального наведення,...
Система керування вогнем танка
Номер патенту: 54601
Опубліковано: 17.03.2003
Автори: Хандога Анатолій Максимович, Ганзера Юрій Іванович, Мошнін Віктор Миколайович, Бондаренко Олександр Григорович, Єрдаков Євген Володимирович, Вакуленко Володимир Вікторович, Касьянов Валерій Іванович
МПК: F41G 5/00
Мітки: керування, вогнем, система, танка
Формула / Реферат:
1. Система керування вогнем танка, яка містить приціл, привід гармати, привід башти, що складається з механізму повороту башти, виконаного з кінематично зв'язаних один з одним електромагніта механізму повороту башти, редуктора, виконавчого двигуна, вентилятора і ручного приводу, кінематично зв'язаного з редуктором електромашинного підсилювача, перший вихід якого з'єднаний з виконавчим двигуном, комутатора електромашинного підсилювача,...
Система керування вогнем танка
Номер патенту: 32632
Опубліковано: 15.02.2001
Автори: Руденко Микола Прохорович, Бусяк Юрій Митрофанович, Фролов Леонід Андрійович
МПК: F41G 5/00
Мітки: система, керування, вогнем, танка
Текст:
...з відомим контуром регулювання, що включає датчик кута вертикального наведення, балістичний обчислювач та привід наведення гармати, дозволило не тільки усунути ручні операції та автоматизувати процес узгодження лінії візування нічного прицілу з віссю каналу ствола гармати при подачі сигналу з виходу да тчика кута вертикального наведення і тим самим добитися скорочення часу для приведення . системи у стан го товності , а отже, і...
Попередній патент: Вібраційна установка для формування бетонних і залізобетонних виробів
Наступний патент: Застосування подрібненої шкаралупи горіхоплідних та/або кісточкових фруктів як протиковзної посипки
Випадковий патент: Крем для масажу