Пристрій ідентифікації активного стану оператора
Номер патенту: 119697
Опубліковано: 10.10.2017
Автори: Різун Ніна Олегівна, Тараненко Юрій Карлович, Олійник Ольга Юріївна
Формула / Реферат
Пристрій ідентифікації активного стану оператора, що містить реєстратор рухової активності оператора, блок сигналізації, реєстратор рухової активності оператора виконаний у вигляді електричного давача, який під'єднаний таймера, що спрацьовує на електричні сигнали вихід, якого під'єднаний до блока сигналізації, причому електричний давач розміщений у зоні впливу на його параметри положення пальців рук оператора, який відрізняється тим, що у пристрій додатково введено: ручний маніпулятор на п'ять кінцевих положень відповідно ліворуч, праворуч, догори, нульове, униз, що розташований у зоні впливу пальців вільної руки оператора; програматор; блок керованих ключів; блок сигналізації, що розташовано у діапазоні огляду оператора та доповнено п'ятьма сигнальними елементами, що задають положення ручного маніпулятора; компаратор; накопичувач.
Текст
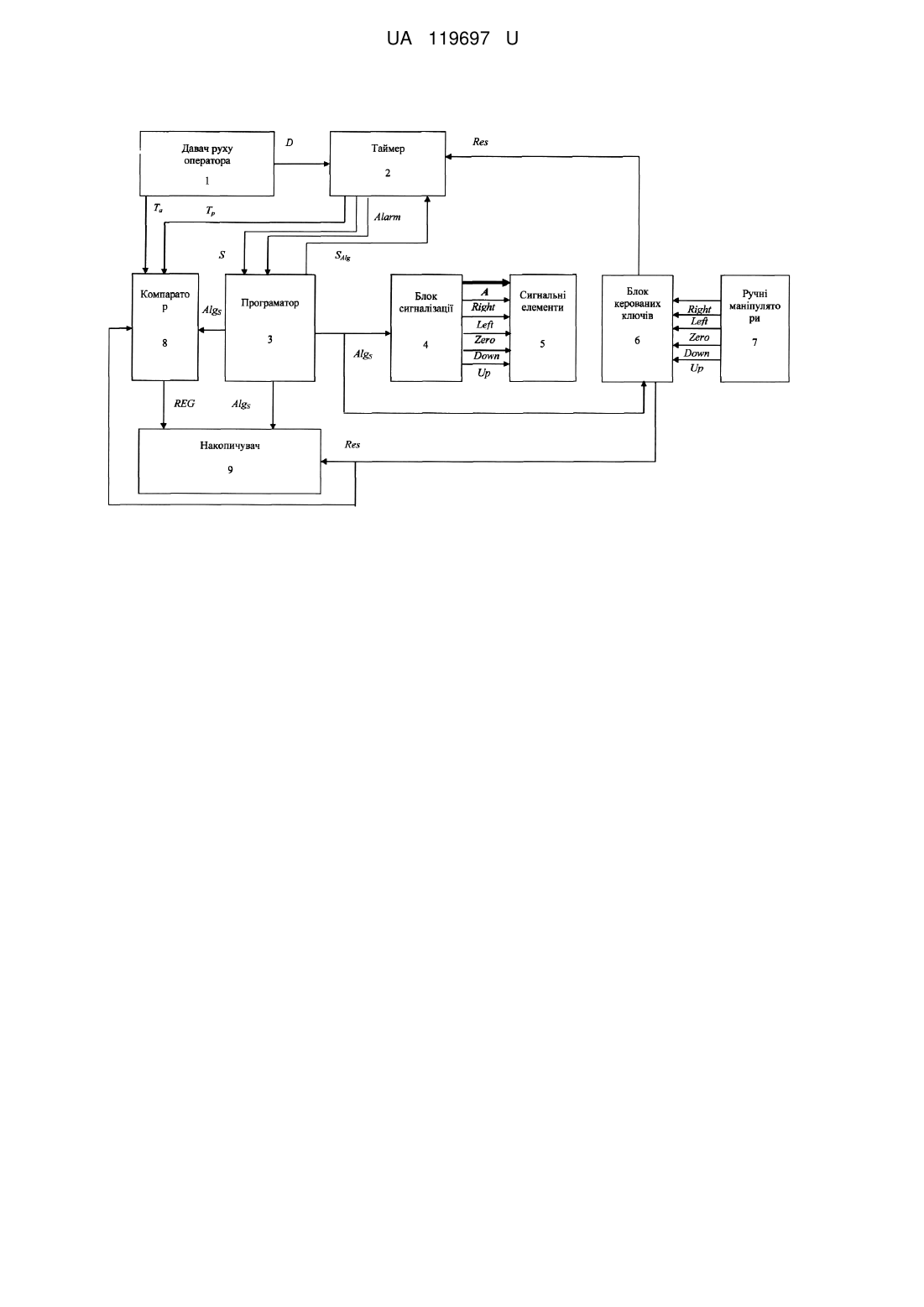
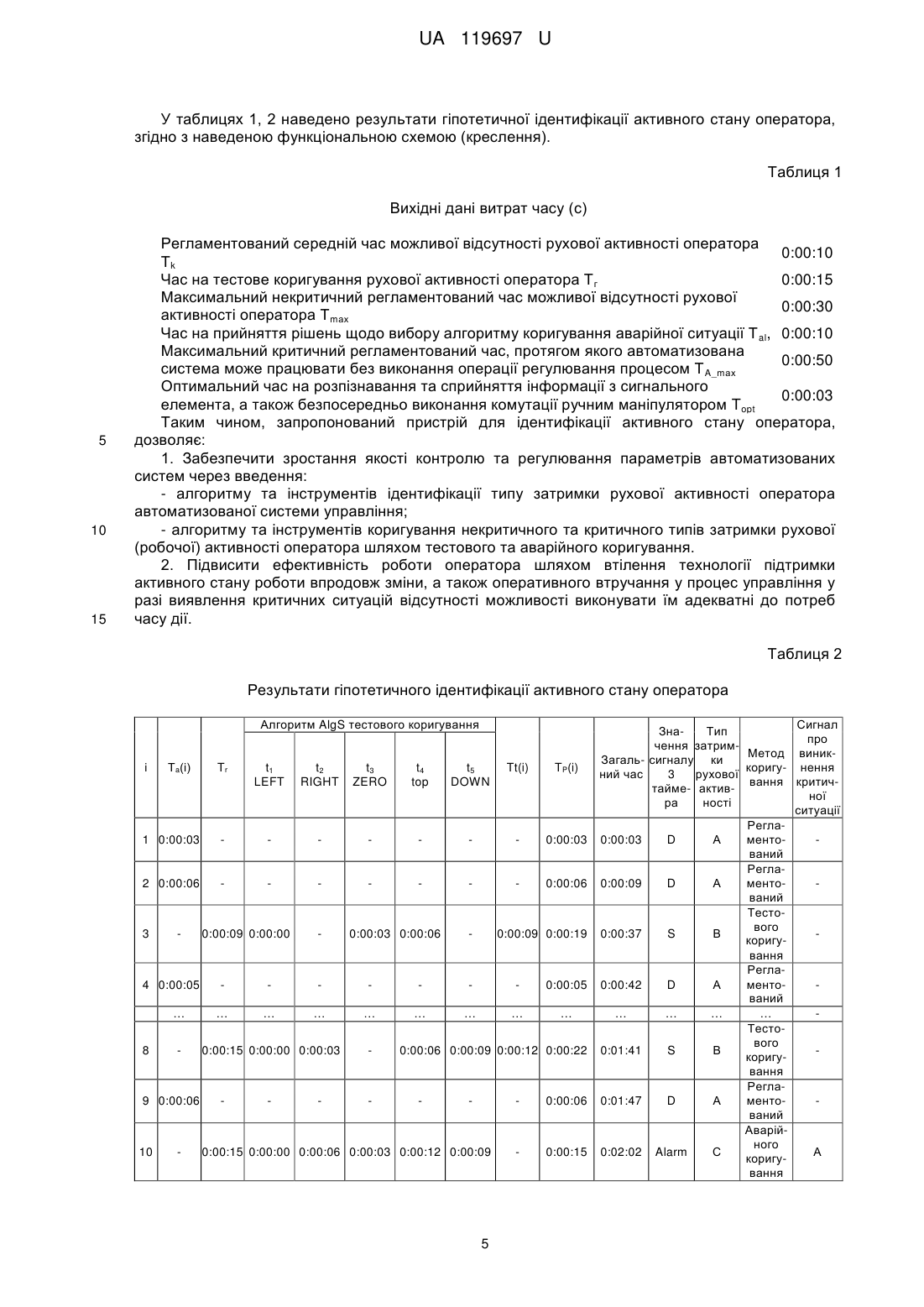
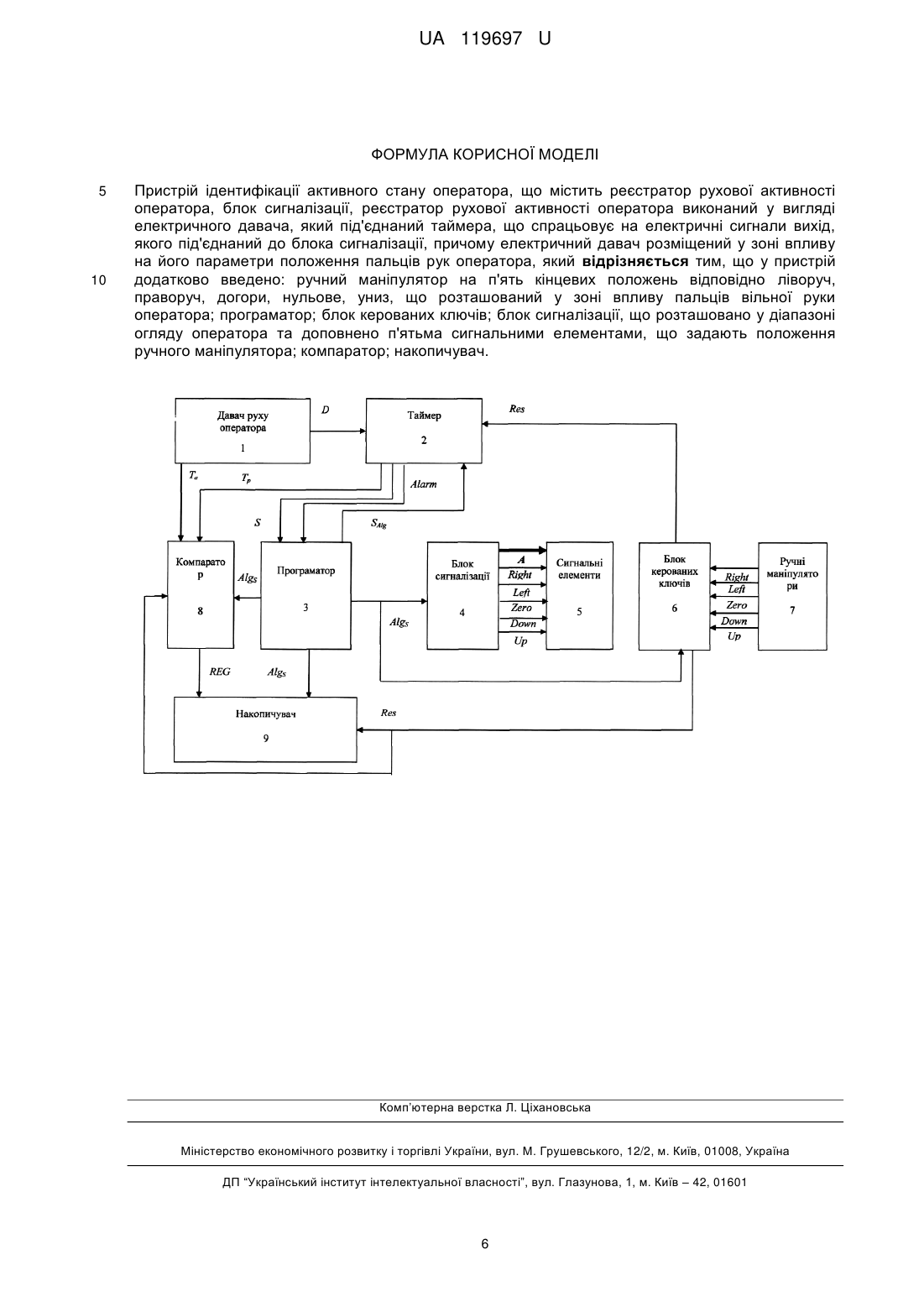
Реферат: Пристрій для ідентифікації активного стану оператора містить реєстратор рухової активності оператора, блок сигналізації, реєстратор рухової активності оператора, виконаний у вигляді електричного давача, який під'єднаний таймера, що спрацьовує на електричні сигнали вихід, якого під'єднаний до блока сигналізації. При цьому електричний давач розміщений у зоні впливу на його параметри положення пальців рук оператора. Пристрій додатково містить ручний маніпулятор на п'ять кінцевих положень відповідно ліворуч, праворуч, догори, нульове, униз, що розташований у зоні впливу пальців вільної руки оператора, програматор, блок керованих ключів, блок сигналізації, що розташовано у діапазоні огляду оператора та доповнено п'ятьма сигнальними елементами, що задають положення ручного маніпулятора, компаратор, накопичувач. UA 119697 U (12) UA 119697 U UA 119697 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до застережних засобів (профілактики) небажаного стану операторів технологічних процесів (особливо - небезпечних), диспетчерів, вартових тощо, зокрема контролю їх фізіологічних показників. Відомий пристрій для контролю функціонального стану оператора [авторське свідоцтво СРСР №1708303, А81В 5/18, бюлетень "Изобретения" № 4, 1992], який містить реєстратор рухливої активності оператора, підсилювач, блок аналізу індикації, блок впливу на стан оператора, інші функціональні блоки, причому реєстратор закріплено на пластині, яка знаходиться під сидінням оператора Недоліком даного пристрою є можливість виявляти наявність / відсутність рухливості людини, проте не здатний: - по-перше, тонко розрізняти випадкову (нерегулярну, нетипову) затримку активності, що знаходиться в допустимих часових межах; - по-друге, виконувати функції активізації робочого стану оператора в разі виявлення явного неприпустимого простою в руховій активності оператора. Деклараційний патент України на винахід UA 58957 А (опубл. 15.08.2003, у Бюл. № 8, 2003 р), який можна вважати найближчим аналогом. В основу винаходу поставлена задача удосконалення пристрою для контролю за станом оператора з забезпеченням коректності впливу на нього. Поставлена задача вирішується тим, що у пристрої для активного контролю стану оператора, що містить реєстратор рухової активності оператора, блок сигналізації, згідно з винаходом, реєстратор рухової активності оператора виконаний у вигляді електричного давача, який під'єднаний до таймера, що спрацьовує на електричні сигнали, вихід якого під'єднаний до блока сигналізації, причому електричний давач розміщений у зоні впливу на його параметри положення пальців рук оператора, електричний давач може бути виконаний у вигляді індуктивного, або ємнісного або тактильного давача. Даний пристрій вже здатний розрізняти випадкову (нерегулярну, нетипову) затримку активності, що знаходиться в допустимих часових межах (із можливістю завдання ситуаційних граничних умов для нічного або денного проміжків часу, що відповідають фахам активності оператора тощо). Але, як і у попередньому винаході, наведений пристрій нездатний додатково до ідентифікації стану рухової активності виконувати й функції: - відновлення (у допустимих межах часу) робочого стану оператора в разі виявлення явного неприпустимого простою в руховій активності оператора; - негайного автоматичного втручання в управління об'єктом у разі ідентифікації нездатності оператора виконувати адекватні до ситуації дії. Основними положеннями, що розглядаються в запропонованому пристрої для ідентифікації активного стану оператора з метою усунення недоліків відомих пристроїв для контролю функціонального стану людини, є наступні: Положення 1. Затримки рухової активності оператора автоматизованої системи управління можливо поділити на три основних типу: - робочі (тип А), що в основному пов'язані із дискретним характером процесу управління, що виконується оператором; некритичні (тип В), що можуть бути пов'язані із випадковим перенесенням уваги оператора на сторонні (які не стосуються регламентованих посадовими інструкціями) об'єкти і дії; - критичні (тип С), що можуть бути пов'язані із небезпечною для процесу управління втратою оператором уваги та здатності виконувати осмислені професійні дії. Положення 2. Коригування кожного з трьох визначених типів затримки рухової (робочої) активності оператора, що виникають, може виконуватися згідно із наступними алгоритмами: - регламентованим - шляхом самостійного (без втручання пристрою ідентифікації) відновлення рухової активності оператора у зв'язку із виникненням наступної регламентованої операції з управління об'єктом; - тестового коригування шляхом автоматизованого (за допомогою пристрою ідентифікації) відновлення рухової активності завдяки використанню тестового алгоритму переключення уваги оператора від поточних на нетипові задачі прийняття та реалізації рішення; - аварійного коригування - шляхом автоматичного (за допомогою пристрою ідентифікації) втручання в управління об'єктом шляхом індикації сигналу виникнення критичної ситуації або переключення системи управління об'єктом на автоматичний режим регулювання. Положення 3. Ідентифікацію означених типів затримки рухової (робочої) активності оператора автоматизованої системи управління можливо виконувати із використанням наступних індикаторів: 1 UA 119697 U 5 10 15 20 25 30 35 40 45 50 55 - регламентованого середнього часу Тk можливої відсутності рухової активності оператора (встановлюється, виходячи з статистичних даних - результатів спостережень за роботою еталонного оператора протягом зміни); - нерегламентованого тестового часу Ttest, який складається з регламентованого середнього часу Тk та часу на тестове коригування рухової активності оператора Тr що у сумі не повинно перевищувати максимального некритичного регламентованого часу Тmах можливої відсутності рухової активності оператора; - аварійного часу Tavar, що складається з регламентованого середнього часу Тk, часу на тестове коригування рухової активності оператора Тr та часу на прийняття рішень щодо вибору алгоритму коригування аварійної ситуації Таl що у сумі не повинно перевищувати максимального критичного регламентованого часу ТA_mах, протягом якого автоматизована система може працювати без виконання операції регулювання процесом. В основу корисної моделі поставлено задачу вдосконалення пристрою для активного контролю стану оператора, в якому шляхом введення нових технологічних операцій та параметрів досягається можливість забезпечення необхідного рівня якості контролю та регулювання параметрів автоматизованих систем завдяки: - ідентифікації та отриманню кількісних показників специфічних характеристик людиниоператора щодо його здібності підтримувати активний стан роботи впродовж зміни, - а також наданню можливості варіативного коригування ситуацій по управлінню об'єктом за результатами ідентифікації рівня здатності оператора виконувати адекватні до потреб часу дії. Поставлена задача вирішується тим, що містить реєстратор рухової активності оператора, блок сигналізації, реєстратор рухової активності оператора виконаний у вигляді електричного давача, який під'єднаний таймера, що спрацьовує на електричні сигнали, вихід, якого під'єднаний до блока сигналізації, причому електричний давач розміщений у зоні впливу на його параметри положення пальців рук оператора, відрізняється тим, що у пристрій додатково введено: ручний маніпулятор на п'ять кінцевих положень відповідно ліворуч, праворуч, догори, нульове, униз, що розташований у зоні впливу пальців вільної руки оператора; програматор; блок керованих ключів; блок сигналізації, що розташовано у діапазоні огляду оператора та доповнено п'ятьма сигнальними елементами, що задають положення ручного маніпулятора; компаратор; накопичувач. Технічним результатом заявленого пристрою є підвищення якості регулювання параметрів роботи автоматизованих систем керування шляхом розширення області використання інструментів ідентифікації активного стану роботи оператора впродовж зміни із метою надання можливостей контролю та коригування ситуацій, що виникають у процесі управління об'єктом, за результатами аналізу типу затримки рухової активності оператора та його здатності виконувати осмислені дії. Корисна модель може бути реалізована на будь-якій елементній базі, включаючи мікропроцесорну з індикаторними лінійками, і навіть на персональному комп'ютері На кресленні наведена функціональна схема пристрій для ідентифікації активного стану оператора, де: 1 - блок давача руху оператора (наприклад інфрачервоний лазер, що виконує сканування); 2 - блок таймера (наприклад спеціалізована мікросхема); 3 - блок програматора; 4 - блок сигналізації; 5 - блок сигнальних елементів (наприклад керовані ключі зі світлодіодами - наприклад стандартна лінійка). Над світлодіодами розташовані відповідні надписи ліворуч, праворуч, догори, нульове, униз. 6 - блок керованих ключів; 7 - блоку ручного маніпулятора; 8 - блок компаратору; 9 - блок накопичувача. Один із виходів блока давача руху оператора 1 підключений до одного із входів блока таймера 2. Два з трьох виходів блока таймера 2 підключені паралельно до блока програматора 3, а один - до одного із входів блока компаратора 8. Ще до одного входу блока компаратора 8 підключений вихід блока давача руху оператора 1. Один із чотирьох виходів блока програматора 3 підключений паралельно до входів блока таймера 2, блока компаратора 8, блока накопичувача 9, блоків сигналізації 4 та керованих ключів 6. Шість виходів блока сигналізації 4 підключені паралельно до блока сигнальних елементів 5. П'ять виходів блока ручних маніпуляторів 7 паралельно підключені до блока керованих ключів 6. Виходи блока 2 UA 119697 U 5 10 15 20 керованих ключів 6 підключені до входів блока таймера 2, блока накопичувача 9 та блока компаратора 8. Єдиний вихід блока компаратора підключений до входу блока накопичувача 9. Запропонований пристрій ідентифікації активного стану оператора працює наступним чином: 1. Для забезпечення роботи пристрою перед виконанням процесу ідентифікації виконуються підготовчі роботи щодо: - проведення експериментів та обчислення показників середнього регламентованого середнього часу Тk можливої відсутності рухової активності оператора; некритичного регламентованого часу Тmах можливої відсутності рухової активності оператора; максимального критичного регламентованого часу Та_max, протягом якого автоматизована система може працювати без виконання операції регулювання процесом; оптимального часу Topt на розпізнавання та сприйняття інформації з сигнального елемента, а також безпосередньо виконання комутації ручним маніпулятором. - збереження цих показників у блоках таймера та програматора, та компаратора. 2. У таймері задається початковий час обліку - регламентований середній час Тk можливої відсутності рухової активності оператора. 3. Здійснення кожної (і)-і регламентованої професійної дії (руху) оператора супроводжується поданням на таймер сигналу часу D з давача руху оператора. 4. Впродовж часу з моменту подання попереднього сигналу про професійні дії (рух) оператора у таймері відбувається відлік часу (починаючи від нуля) із постійним контролем відсутності перевищення значення поточного часу у таймері Тр(і) значення регламентованого середнього часу Тk: Tp(i) Tk, 25 30 35 5. У випадку, якщо момент надходження сигналу Тр(і) з давача руху оператора на таймер відповідає умові (1), компаратор ідентифікує (і)-й поточний стан оператора типом робочої затримки активності оператора (тип А). 6. При цьому поточне значення часу затримки, збережене у таймері, обнульовується Тр(і) =0 та таймер починає новий відлік часу. Відновлення дієвої активності оператора здійснюється за регламентованим алгоритмом - тобто шляхом самостійного відновлення рухової активності оператора у зв'язку із виникненням наступної регламентованої операції з управління об'єктом. 7. Інформація про кожний (і)-й поточний стан оператора надходить з давача руху та таймера, зберігається у накопичувачі пристрою у форматі кортежу REG, що утримує кількісні характеристики затримки рухової активності оператора проміжок часу до здійснення дії Тр(і) та момент здійснення Та(і), а також якісну характеристику - тип затримки рухової (робочої) активності оператора: REG = , 40 45 (2) 8. У випадку, якщо сигнал часу D з давача руху оператора не надходить до того моменту, як поточне значення часу у таймері Тр(і) дорівнює регламентованому середньому часу Тk, але сигнал з давача руху оператора не надходить, таймер передає до програматора сигнал S щодо необхідності використання алгоритму тестового коригування затримки рухової (робочої) активності оператора. 9. У програматорі, згідно із закладеними у нього програмами, формується (вибирається) алгоритм Algs тестового коригування протягом часу Тr, який включає передання сигналу до блока сигналізації щодо послідовності та часу висвітлення відповідно сигнальних елементів Left, Right, Zero, Down, Up впродовж часу, що не перевищує Тr (за умови Тk+Tr Tmax): Algs = {Seq, }, 50 (1) (3) При цьому різниця між моментами часу висвітлення сигнальних елементів повинна бути не більше ніж Topt (ti – ti-1 Topt). 10. Програматор також передає сигнал SAlg до таймера про початок роботи алгоритму та він починає відрахунок часу із постійним контролем відсутності перевищення значення поточного часу у таймері Тр(і) значення максимального некритичного регламентованого часу Тmах: 55 Тр(і) Тmах, (4) 3 UA 119697 U 5 10 11. Той самий сигнал Algs програматор передає на блок керованих ключів. 12. У разі здійснення оператором правильної комутації - тобто співпадіння комплексу показників послідовності Seq та часу комутації Res={Seq, }: - сигнал Res від маніпулятора через відкритий відповідний ключ блока надходить до таймера, після чого поточне значення часу у таймері обнульовується Tр(і) =0 та таймер починає новий відлік часу; - сигнал Res від маніпулятора та сигнал Algs від програматора надходять до компаратора, який при підтвердженні виконання умови (4) ідентифікує (і) поточний стан оператора типом некритичної затримки активності оператора (тип В); - сигнал Res від маніпулятора надходить та зберігається у накопичувачі пристрою у форматі кортежу REG, що утримує кількісні характеристики тривалості некритичної затримки рухової активності оператора дії Тр(і)=Та(і-1)+Тk; алгоритму тестового коригування та моменту часу, коли він був успішно виконаний Tt(i)=Tp(i)+Tr; якісну характеристику - тип затримки рухової активності оператора: 15 REG=. 20 25 Тобто здійснення оператором правильної комутації є підтвердженням факту збереження оператором здатності виконувати осмислені адекватні професійні дії, що була ідентифікована та скоригована шляхом автоматизованого тестового алгоритму переключення уваги оператора від поточних на нетипові задачі прийняття та реалізації рішення. 13. У разі здійснення оператором неправильної комутації - тобто неспівпадіння комплексу показників заданої послідовності Seq та/або часу комутації Res = {Seq, }: - сигнал від маніпулятора не надходить до таймера, у зв'язку із чим таймер продовжує відлік часу із постійним контролем відсутності перевищення значення поточного часу у таймері Тр(і) значення максимального критичного регламентованого часу Та_max протягом якого автоматизована система може працювати без виконання операції регулювання процесом: Тp(і) Та_max 30 35 40 50 55 (6) - таймер передає до програматора сигнал Alarm щодо необхідності використання аварійного коригування - шляхом автоматичного втручання в управління об'єктом; - у програматорі, згідно із закладеними у нього програмами, формується (вибирається) алгоритм Algs, який включає передання сигналу до блока сигналізації індикації за допомогою елемента А сигналу про виникнення критичної ситуації впродовж часу, що не перевищує Tal; - сигнал Algs від програматора надходить до компаратора, який при підтвердженні виконання умови (6) ідентифікує (і)-й поточний стан оператора типом критичної затримки активності оператора (тип С); - на підставі сигналів з таймера Тр(і) та програматора Algs у накопичувачі зберігається інформація REG, що утримує кількісні характеристики тривалості аварійної затримки рухової активності оператора дії Тр(і)=Та(і-1)+ Tavar та якісну характеристику - тип затримки рухової активності оператора: REG = . 45 (5) (7) 14. Параметри алгоритму тестового коригування можуть змінюватися у залежності від: - кількості простоїв у руховій активності оператора впродовж поточної зміни Kν; - середньої кількості простоїв у руховій активності оператора впродовж змін Kν; - поточного часу зміни, який відповідає п'яти типам функціональних станів оператора, а саме: первинна реакція (І) - короткочасне зниження фактичного рівня впевненості та точності дій оператора; гіперкомпенсація (II) і компенсація (III) - поступове підвищення і стабілізація показників впевненості та точності професійної активності оператора до його індивідуального фактичного рівня (період підтримки норми); субкомпенсація (IV) і декомпенсація (V) - зниження нормального для оператора рівня впевненості та точності професійних дій, пов'язане в основному з втомою. 15. Параметри алгоритму аварійного коригування можуть передбачати також варіант реалізації операції переключення системи управління об'єктом на автоматичний режим регулювання. 4 UA 119697 U У таблицях 1, 2 наведено результати гіпотетичної ідентифікації активного стану оператора, згідно з наведеною функціональною схемою (креслення). Таблиця 1 Вихідні дані витрат часу (с) 5 10 15 Регламентований середній час можливої відсутності рухової активності оператора 0:00:10 Тk Час на тестове коригування рухової активності оператора Т г 0:00:15 Максимальний некритичний регламентований час можливої відсутності рухової 0:00:30 активності оператора Тmах Час на прийняття рішень щодо вибору алгоритму коригування аварійної ситуації Т al, 0:00:10 Максимальний критичний регламентований час, протягом якого автоматизована 0:00:50 система може працювати без виконання операції регулювання процесом Т A_mах Оптимальний час на розпізнавання та сприйняття інформації з сигнального 0:00:03 елемента, а також безпосередньо виконання комутації ручним маніпулятором Topt Таким чином, запропонований пристрій для ідентифікації активного стану оператора, дозволяє: 1. Забезпечити зростання якості контролю та регулювання параметрів автоматизованих систем через введення: - алгоритму та інструментів ідентифікації типу затримки рухової активності оператора автоматизованої системи управління; - алгоритму та інструментів коригування некритичного та критичного типів затримки рухової (робочої) активності оператора шляхом тестового та аварійного коригування. 2. Підвисити ефективність роботи оператора шляхом втілення технології підтримки активного стану роботи впродовж зміни, а також оперативного втручання у процес управління у разі виявлення критичних ситуацій відсутності можливості виконувати їм адекватні до потреб часу дії. Таблиця 2 Результати гіпотетичного ідентифікації активного стану оператора Алгоритм AlgS тестового коригування і Тa(і) Tr t1 LEFT t2 RIGHT t3 ZERO t4 top t5 DOWN Tt(i) TP(i) 1 0:00:03 0:00:03 2 0:00:06 0:00:06 3 4 0:00:05 … 8 9 0:00:06 10 0:00:09 0:00:00 0:00:03 0:00:06 0:00:09 0:00:19 0:00:05 … … … … … … … … 0:00:15 0:00:00 0:00:03 0:00:06 0:00:09 0:00:12 0:00:22 0:00:15 0:00:00 0:00:06 0:00:03 0:00:12 0:00:09 5 0:00:06 0:00:15 Сигнал ЗнаТип про чення затримМетод виникЗагаль- сигналу ки коригу- нення ний час 3 рухової вання критичтайме- активної ра ності ситуації Регла0:00:03 D А ментований Регла0:00:09 D А ментований Тестового 0:00:37 S В коригування Регла0:00:42 D А ментований … … … … Тестового 0:01:41 S В коригування Регла0:01:47 D А ментований Аварійного 0:02:02 Alarm С А коригування UA 119697 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Пристрій ідентифікації активного стану оператора, що містить реєстратор рухової активності оператора, блок сигналізації, реєстратор рухової активності оператора виконаний у вигляді електричного давача, який під'єднаний таймера, що спрацьовує на електричні сигнали вихід, якого під'єднаний до блока сигналізації, причому електричний давач розміщений у зоні впливу на його параметри положення пальців рук оператора, який відрізняється тим, що у пристрій додатково введено: ручний маніпулятор на п'ять кінцевих положень відповідно ліворуч, праворуч, догори, нульове, униз, що розташований у зоні впливу пальців вільної руки оператора; програматор; блок керованих ключів; блок сигналізації, що розташовано у діапазоні огляду оператора та доповнено п'ятьма сигнальними елементами, що задають положення ручного маніпулятора; компаратор; накопичувач. Комп’ютерна верстка Л. Ціхановська Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G08B 23/00, G06F 7/00
Мітки: оператора, пристрій, стану, ідентифікації, активного
Код посилання
<a href="https://ua.patents.su/8-119697-pristrijj-identifikaci-aktivnogo-stanu-operatora.html" target="_blank" rel="follow" title="База патентів України">Пристрій ідентифікації активного стану оператора</a>
Пристрій для активного контролю стану оператора
Номер патенту: 58957
Опубліковано: 15.08.2003
Автор: Герасіка Віктор Андрійович
МПК: A61B 5/05, G08B 23/00
Мітки: активного, оператора, контролю, пристрій, стану
Формула / Реферат:
1. Пристрій для активного контролю стану оператора, що містить реєстратор рухової активності оператора, блок сигналізації, який відрізняється тим, що реєстратор рухової активності оператора виконаний у вигляді електричного давача, який під'єднаний до спрацьовуючого на електричні сигнали таймера, вихід якого під'єднаний до блока сигналізації, при цьому електричний давач розміщений у зоні впливу на його параметри положення пальців рук...
Пристрій для контролю психофізіологічного стану оператора
Номер патенту: 56834
Опубліковано: 15.08.2005
Автор: Буйнов Сергій Георгійович
МПК: A61B 5/16
Мітки: оператора, психофізіологічного, контролю, стану, пристрій
Формула / Реферат:
1.Пристрій для контролю психофізіологічного стану оператора, який містить панель управління, що з’єднана з органами управління, терменвокси та послідовно з’єднані інтерфейсний блок, блок порівняння, сигналізатор і дисплей, що входять до складу ЕОМ, при цьому другий вихід блока порівняння з’єднаний з входом блока пам’яті, який відрізняється тим, що має додаткові органи управління, при цьому поряд з органами управління розташовані терменвокси,...
Пристрій ідентифікації діяльності оператора автоматизованої системи керування із під-регулятором
Номер патенту: 118161
Опубліковано: 25.07.2017
Автори: Тараненко Юрій Карлович, Різун Ніна Олегівна, Олійник Ольга Юріївна
МПК: G05B 11/01, G06F 7/00
Мітки: пристрій, під-регулятором, оператора, автоматизованої, діяльності, системі, ідентифікації, керування
Формула / Реферат:
Пристрій ідентифікації діяльності оператора автоматизованої системи керування із ПІД-регулятором зі змінними коефіцієнтами настроювання, який містить задавач завдання, елемент віднімання, пропорційну, інтегральну, диференціальну складові, суматор та ПІД-регулятор, обладнаний системою вибору одного із двох можливих коефіцієнтів пропорційної, інтегральної та диференціальної складових, який відрізняється тим, що вибір можливих коефіцієнтів...
Пристрій для контролю психофізіологічного стану оператора комп’ютера
Номер патенту: 44439
Опубліковано: 15.02.2002
Автор: Буйнов Сергій Георгійович
МПК: A61B 5/16
Мітки: комп'ютера, оператора, стану, психофізіологічного, пристрій, контролю
Формула / Реферат:
1. Пристрій для контролю психофізіологічного стану оператора комп'ютера, який містить клавіатуру, послідовно з'єднані перетворювач швидкості переміщення клавіші в електричний сигнал, інтерфейс, блок пам'яті, блок порівняння, сигналізатор і дисплей, який відрізняються тим, що перетворювач швидкості переміщення клавіші в електричний сигнал виконаний у вигляді терменвокса.2. Пристрій по п. l, який відрізняється тим, що терменвокс...
Пристрій для контролю психофізіологічного стану оператора-інваліда
Номер патенту: 64594
Опубліковано: 16.02.2004
Автор: Буйнов Сергій Георгійович
МПК: A61B 5/16
Мітки: оператора-інваліда, пристрій, контролю, психофізіологічного, стану
Формула / Реферат:
1. Пристрій для контролю психофізіологічного стану оператора-інваліда, що містить панель управління, органи управління, датчики стану органів управління, виконані у вигляді окремих модулів термінвоксів з пристроями бездротового зв'язку і автономними джерелами живлення у різних діапазонах звукових частот для різних органів управління, інтерфейс, блок пам'яті, блок порівняння, сигналізатор і дисплей, який відрізняється тим, що панель управління...
Попередній патент: Спосіб виготовлення гвинтової заготовки із відкритою навивкою витків
Наступний патент: Спосіб визначення модулів пружності та демпфування в еластомерах
Випадковий патент: Пристрій для діагностики тиску гірських порід