Пристрій ідентифікації діяльності оператора автоматизованої системи керування із під-регулятором
Номер патенту: 118161
Опубліковано: 25.07.2017
Автори: Різун Ніна Олегівна, Олійник Ольга Юріївна, Тараненко Юрій Карлович
Формула / Реферат
Пристрій ідентифікації діяльності оператора автоматизованої системи керування із ПІД-регулятором зі змінними коефіцієнтами настроювання, який містить задавач завдання, елемент віднімання, пропорційну, інтегральну, диференціальну складові, суматор та ПІД-регулятор, обладнаний системою вибору одного із двох можливих коефіцієнтів пропорційної, інтегральної та диференціальної складових, який відрізняється тим, що вибір можливих коефіцієнтів пропорційної, інтегральної та диференціальної складових виконується оператором вручну із сукупностей: початкових значень коефіцієнтів ПІД-регулятора, що задаються за допомогою задавачів початкових значень на початку роботи АСК; керуючих значень, що у разі необхідності задаються безпосередньо оператором АСК за допомогою задавачів керуючих значень коефіцієнтів пропорційної, інтегральної та диференціальної складових; пристрій додатково містить блоки визначення та індикації розміру розузгодження як результат розрахунку відхилення значення регульованого параметра від його завдання; пристрій додатково обладнаний системою ручного вибору одного із двох можливих варіантів задання сигналу управління - вихідного сигналу ПІД-регулятору або безпосередньо керуючого сигналу, сформованого оператором; пристрій додатково обладнаний системою ручного оператора одного з трьох можливих варіантів задання завдання, а саме: початкового значення сигналу завдання, що задається на початку роботи АСК, використовується для обчислення величини сигналу розузгодження, а результат цього обчислення подається на вхід ПІД-регулятора; змінного завдання, що задається оператором АСК у разі ідентифікації їм передкритичної ситуації, використовується для обчислення величини сигналу розузгодження, а результат цього обчислення подається на вхід ПІД-регулятора, керуючого завдання, що задається оператором АСК у разі ідентифікації їм критичної ситуації для безпосереднього подання як сигнал управління на вхід об'єкта.
Текст
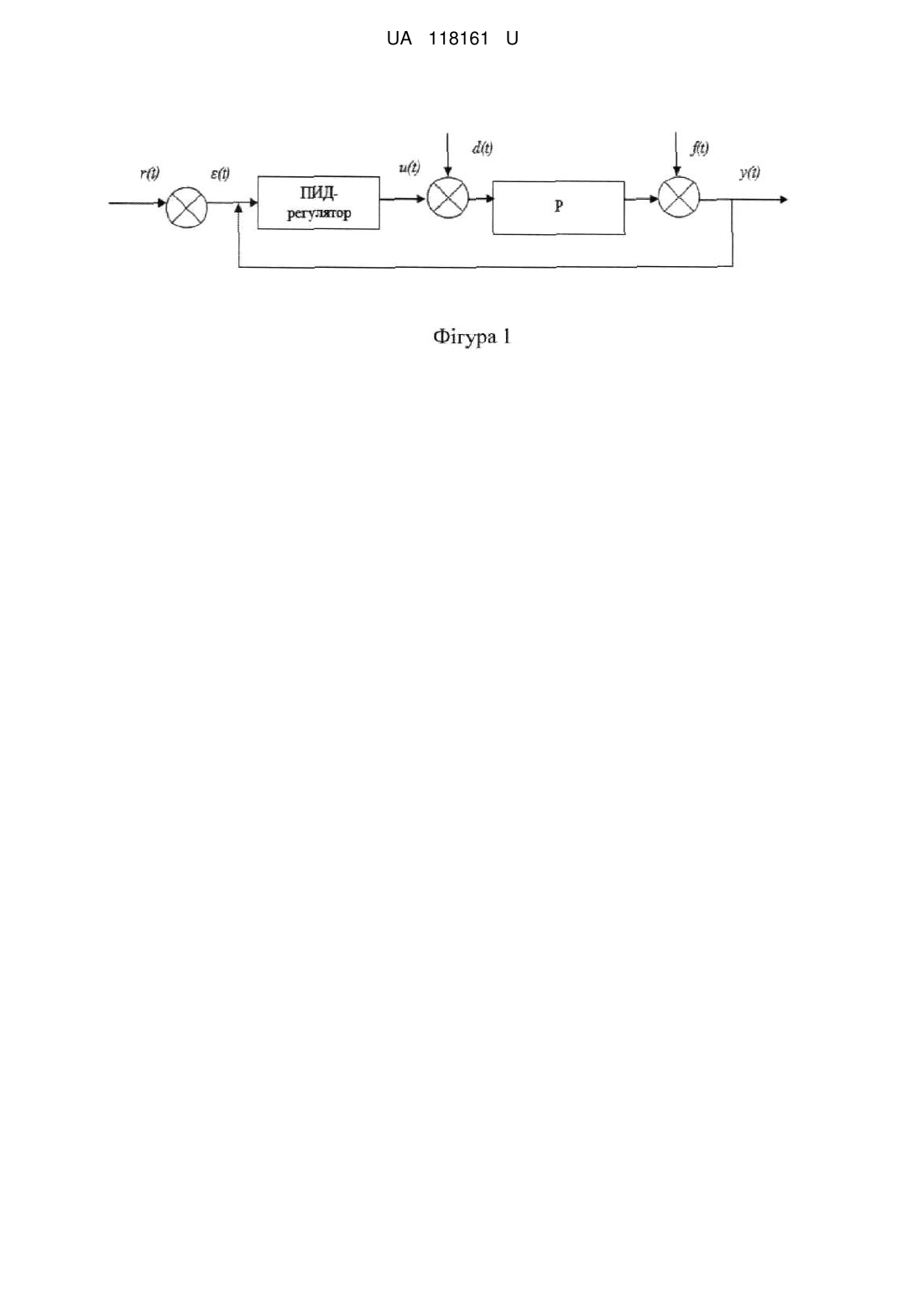
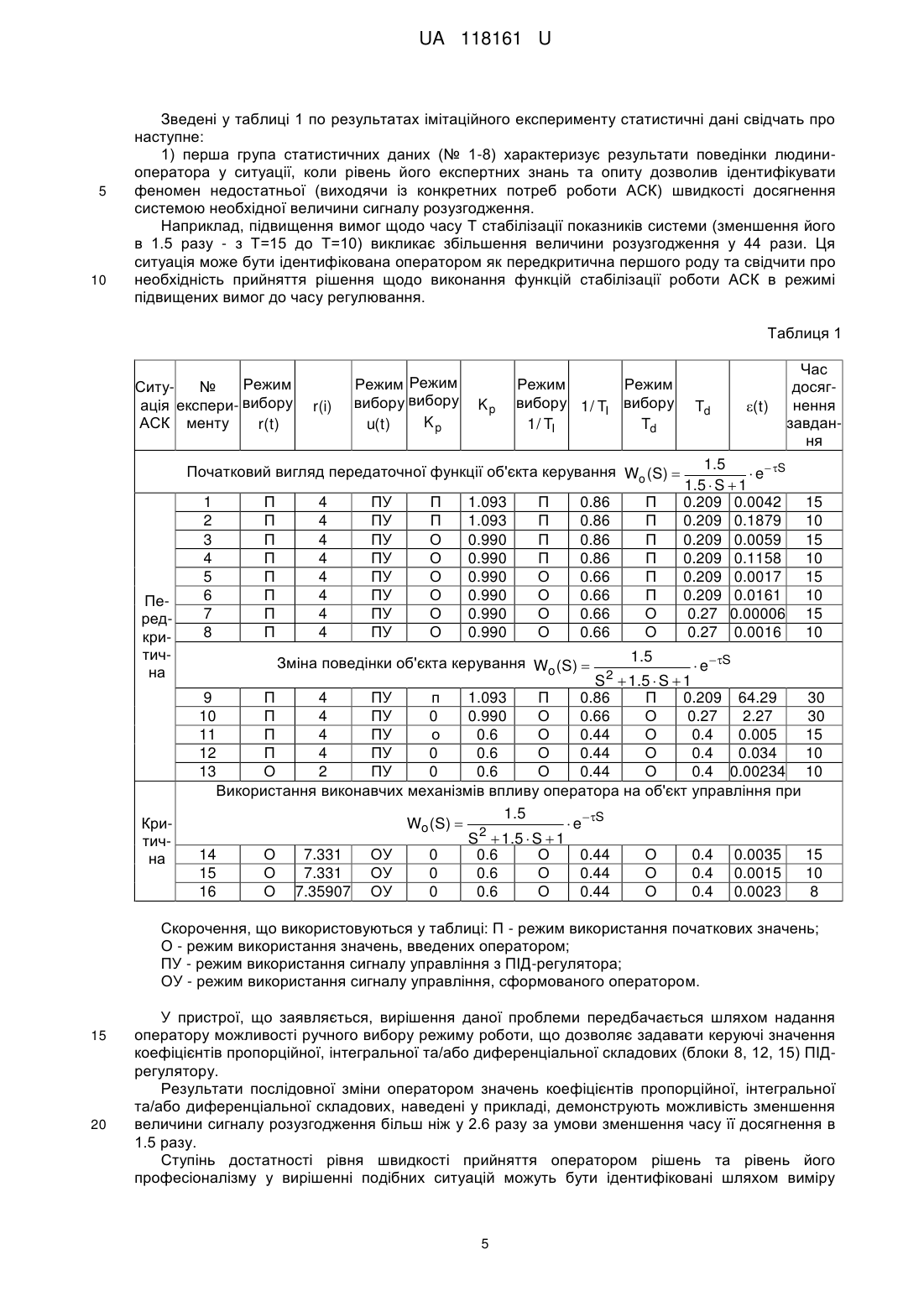
Реферат: Пристрій ідентифікації діяльності оператора автоматизованої системи керування із ПІДрегулятором зі змінними коефіцієнтами настроювання містить задавач завдання, елемент віднімання, пропорційну, інтегральну, диференціальну складові, суматор та ПІД-регулятор, обладнаний системою вибору одного із двох можливих коефіцієнтів пропорційної, інтегральної та диференціальної складових. Вибір можливих коефіцієнтів пропорційної, інтегральної та диференціальної складових виконується оператором вручну із сукупностей: початкових значень коефіцієнтів ПІД-регулятора, що задаються за допомогою задавачів початкових значень на початку роботи АСК; керуючих значень, що у разі необхідності задаються безпосередньо оператором АСК за допомогою задавачів керуючих значень коефіцієнтів пропорційної, інтегральної та диференціальної складових; пристрій додатково містить блоки визначення та індикації розміру розузгодження як результату розрахунку відхилення значення регульованого параметра від його завдання; пристрій додатково обладнаний системою ручного вибору одного із двох можливих варіантів задання сигналу управління - вихідного сигналу ПІД-регулятору або безпосередньо керуючого сигналу, сформованого оператором; пристрій додатково обладнаний системою ручного оператора одного з трьох можливих варіантів задання завдання, а саме: початкового значення сигналу завдання, що задається на початку роботи АСК, використовується для обчислення величини сигналу розузгодження, а результат цього обчислення подається на вхід ПІД-регулятора; змінного завдання, що задається оператором АСК у разі ідентифікації їм передкритичної ситуації, використовується для обчислення величини сигналу розузгодження. Результат обчислення подається на вхід ПІД-регулятора, керуючого завдання, що задається оператором АСК у разі ідентифікації їм критичної ситуації для безпосереднього подання як сигнал управління на вхід об'єкта. UA 118161 U (12) UA 118161 U UA 118161 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до автоматики та приладобудування і може ефективно використовуватись для автоматичного регулювання параметрів різноманітних технологічних процесів. Відома автоматизована система із ПІД-регуляторами [Самоналагоджувальний ПІДрегулятор. Патент РФ RU (11) 2419122, кл. G05B 13/02, 2011] дозволяє вирішити проблеми забезпечення стабільної роботи системи при великих змінах параметрів об'єкта при переході з режиму на режим. Для цього в систему введені І-регулятор, блок управління і блок самонастроювання амплітуд випробувального сигналу, генератор випробувального сигналу налаштований так, щоб періоди випробувальних частот були кратні періоду дискретності. Недоліком даної системи є відсутність ідентифікації місця і характеристик діяльності людини-оператора як контролюючої та керуючої ланки автоматизованої системи, що дозволяє здійснювати функції регулювання в ситуаціях, коли закони управління, реалізовані в ПІДрегуляторі, погано або зовсім не справляються із завданням стабілізації системи. Відома система ідентифікації місця людини в автоматизованій системі професійної атестації [Ризун Н.О. Вопросы идентификации тестируемого как ПИД-регулятора в составе автоматизированной системы профессиональной аттестации. Міжнародний науково-технічний журнал "Вимірювальна та обчислювальна техніка в технологічних процесах", № 3 (41). Хмельницкий.-2012. - С. 133-141]. Автор доводить, що з одного боку в реальних умовах людина-оператор бере участь в системі управління, орієнтуючись на показання приладів та прагнучи утримувати їх свідчення в межах дозволеного максимального значення контрольованої величини, не допускаючи перевищення цього рівня. З іншого боку, відомо, що ПІД-регулятор - це ланка в контурі управління зі зворотним зв'язком, що використовується для підтримки заданого значення вимірюваного параметра (Фіг. 1). Тоді, беручи до уваги основне призначення ПІД-регулятора, процес прийняття рішення людиною-оператором автором пропонується розглядати як підтримання (досягнення) оператором заданого (оптимального) рівня (уставки) вирішення поставленого завдання. У запропонованій як приклад блок-схемі: r(t ) - завдання, що вимагає правильного рішення; u(t ) рішення поданого для прийняття рішення завдання; d(t ) - технічні похибки в процесі передачі прийнятого рішення; y(t ) - результат впливу на систему управління прийнятого оператором рішення; f (t ) - похибки вимірювань результату впливу (шум вимірювань); Р - АСУ (об'єкт регулювання); (t ) - розузгодження (відхилення результату впливу на систему управління прийнятого оператором рішення від завдання). При цьому згідно з проведеними аналогіями ПІД-регулятора та людини-оператора автором пропонується наступна інтерпретація коефіцієнтів математичного виразу, що описує перехідні процеси ПІД-регулятора: 1 W ( s) K p Tds , TIs де K p - пропорційна компонента: міра ступеня відповідності особистісних персональних характеристик (рішучість, стресостійкість) вибраному для вирішення поставленого завдання еталону людини-оператора; 1/ TI - інтегральна компонента: міра ступеня відповідності накопичених оператором експертних знань і досвіду необхідного рівня практичної і теоретичної досвідченості у проблемній області поставленого завдання; Td - диференціальна компонента: міра ступеня розбіжності фактичної та еталонної швидкості реалізації логічних розумових процесів обробки інформації щодо прийняття рішення. Основним недоліком даної системи є відсутність ідентифікації інструментів реалізації контролюючих і керуючих впливів людини-оператора як результатів прийнятого ним рішення із використанням аналогій із законами ПІД-регулювання. Найбільш близьким до пристрою, що заявляється, є ШД-регулятор із змінними коефіцієнтами настроювання [Мельник B.C. ПІД-регулятор із змінними коефіцієнтами настроювання: патент на корисну модель № 49679 Україна: МПК G05B 11/01; Замовник та патентовласник: Національний Університет Водного Господарства та Природокористування. № u200910977, заявл. 30.10.2009, опубл. 11.05.2010, Бюл. № 9, 2010 р.-3 с], у якому як інструменти реалізації контролюючих та керуючих впливів в ситуаціях, коли закони управління, реалізовані в початкових настройках ПІД-регулятора, погано або зовсім не справляються із 1 UA 118161 U 5 10 15 20 25 30 35 40 45 50 55 завданням стабілізації системи, запропоновано систему автоматичного вибору одного із двох можливих коефіцієнтів пропорційної, інтегральної та диференціальної складових ПІДрегулятора за значенням відносного показника, що дорівнює відношенню модуля різниці завдання регулятора и виміряного значення регульованого параметра до завдання регулятора. Недоліком даного ПІД-регулятора є відсутність визначення місця і характеристик діяльності людини-оператора як контролюючої та керуючої ланки автоматизованої системи, що використовує запропоновані інструменти зміни настройки коефіцієнтів пропорційної, інтегральної та диференціальної складових ПІД-регулятора згідно із результатами прийнятих їм рішень в передкритичних та критичних ситуаціях. Основними положеннями, що розглядаються в запропонованому пристрої ідентифікації діяльності оператора автоматизованої системи керування із ПІД-регулятором з метою усунення недоліків відомих автоматизованих систем з ПІД-регуляторами, є наступні: Положення 1. Людина-оператор є елементом автоматизованої системи управління, що виконує контролюючі та регулюючі функції на підставі реалізації прийнятих їм рішень. Положення 2. Базові процеси прийняття рішення людиною-оператором щодо регулювання стану автоматизованої системи управління можуть бути адекватно ідентифіковані за допомогою перехідних процесів класичного ПІД (ПІ, ПД)-регулятора. Положення 3. У більшості випадків регулюючий вплив людини-оператора як елемента автоматизованої системи управління з ПІД-регулятором є необхідним у ситуаціях, коли закони управління, реалізовані в ПІД-регуляторі, погано (передкритична ситуація) або зовсім (критична ситуація) не справляються із завданням стабілізації роботи системи. Положення 4. Рішення про необхідність використання своєї регулюючої функції людинаоператор приймає самостійно шляхом ідентифікації передкритичної або критичної ситуації на підставі результатів аналізу швидкості досягнення значення показника ступеня разугодження (відхилення значення регульованого параметра від його завдання (t ) r(t ) y(t )) , задовільної величини ((t ) 0) . Положення 5. У разі ідентифікації людиною-оператором ситуації як передкритичної його регулюючий вплив може виражатися у використанні інструментів зміни/встановлення коефіцієнтів пропорційної, інтегральної та диференціальної складових, що дозволяють ідентифікувати ступінь відповідності окремих характеристик рівня професіоналізму людиниоператора вимогам ситуації з прийняття рішення, що склалася, а саме: - прийняття рішення про необхідність/ступінь зміни інтегральної компоненти 1/ TI свідчать про здатність оператора оцінити розмір впливу на рівень стабільності системи накопичуваних характеристик процесу, що регулюється, та є виразом наявності в оператора достатньої кількості агрегованих професійних знань експерта; - прийняття рішення про необхідність/ступінь зміни диференціальної компоненти Td свідчать про здатність оператора ідентифікувати рівень залежності характеристик регульованого процесу від часу, та є підтвердженням досягнутої в процесі професійної діяльності фактичної швидкості прийняття ним рішень; - прийняття рішення про необхідність/ступінь зміни коефіцієнта посилення K p та значення завдання r(t ) свідчить про наявність у оператора необхідних навичок та особистісних якостей (витримка, впевненість, почуття міри, рішучість) ідентифікувати необхідну величину сигналу та порівнювати її з виробленою. Положення 6. У разі ідентифікації людиною-оператором ситуації як критичної його регулюючий вплив має бути виражений у використанні виконавчих механізмів у формі: - відключення режиму вироблення ПІД-регулятором сигналу управління u(t ) ; - вироблення керуючого сигналу як результату ідентифікації ступеня відповідності реалізованих людиною-оператором аналогій процесу прийняття рішень із законами ПІД (ПІ, ПД)-регулювання вимогам поточної ситуації, що потребує стабілізації; - безпосереднє подання людиною-оператором керуючого сигналу u(t ) на вхід об'єкта управління. В основу корисної моделі поставлено задачу вдосконалення ПІД-регулятора із змінними коефіцієнтами настроювання, в якому шляхом введення нових технологічних операцій та параметрів досягається можливість ідентифікації та отримання кількісних показників специфічних характеристик людини-оператора щодо його здібності забезпечувати необхідний рівень якості контролю та регулювання параметрів автоматизованих систем, особливо у ситуаціях, коли закони, реалізовані в ПІД-регуляторі, погано або зовсім не справляються з поставленим завданням зі стабілізації роботи автоматизованої системи керування (АСК). 2 UA 118161 U 5 10 15 20 25 30 35 40 45 50 55 Пристрій ідентифікації діяльності оператора автоматизованої системи керування із ПІДрегулятором зі змінними коефіцієнтами настроювання, який містить задавач завдання, елемент віднімання, пропорційну, інтегральну, диференціальну складові, суматор та ПІД-регулятор, обладнаний системою вибору одного із двох можливих коефіцієнтів пропорційної, інтегральної та диференціальної складових, згідно з корисною моделлю, вибір можливих коефіцієнтів пропорційної, інтегральної та диференціальної складових виконується оператором вручну із сукупностей: початкових значень коефіцієнтів ПІД-регулятора, що задаються із допомогою задавачів початкових значень на початку роботи АСК; керуючих значень, що у разі необхідності задаються безпосередньо оператором АСК за допомогою задавачів керуючих значень коефіцієнтів пропорційної, інтегральної та диференціальної складових; пристрій додатково містить блоки визначення та індикації розміру розузгодження як результату розрахунку відхилення значення регульованого параметра від його завдання; пристрій додатково обладнаний системою ручного вибору одного із двох можливих варіантів задання сигналу управління - вихідного сигналу ПІД-регулятору або безпосередньо керуючого сигналу, сформованого оператором; пристрій додатково обладнаний системою ручного оператором одного з трьох можливих варіантів задавання завдання, а саме: початкового значення сигналу завдання, що задається на початку роботи АСК, використовується для обчислення величини сигналу розузгодження, а результат цього обчислення подається на вхід ПІД-регулятора; змінного завдання, що задається оператором АСК у разі ідентифікації їм передкритичної ситуації, використовується для обчислення величини сигналу розузгодження, а результат цього обчислення подається на вхід ПІД-регулятора, керуючого завдання, що задається оператором АСК у разі ідентифікації їм критичної ситуації для безпосереднього подання як сигнал управління на вхід об'єкта. Технічним результатом заявленого пристрою є підвищення якості регулювання параметрів роботи автоматизованих систем керування шляхом розширення області використання інструментів ідентифікації діяльності людини-оператора як контролюючої та регулюючої ланки АСК, здатної завдяки наявності накопичених експертних знань та опиту, достатньої скорості прийняття рішення та сукупності особистісних якостей щодо рішучого прийняття рішення: - ідентифікувати передкритичні і критичні ситуації; - здійснювати управління/настроювання параметрів ПІД-регулятора; - застосовувати власні виконавчі механізми впливу на об'єкт управління в реальному масштабі часу; - використовуючи для реалізації процесів прийняття рішень закони ПІД-регулювання. На фігурі 2 наведена функціональна схема пристрою ідентифікації діяльності оператора автоматизованої системи керування із ПІД-регулятором. У цій системі ПІД-регулятор реалізовано як ПІД-регулятор із змінними коефіцієнтами настроювання та змінним завданням, та складається із: системи ручного вибору сигналу завдання 1, до якої входять блок задавача початкового завдання 2, що задається на початку роботи АСК, блок задавача керуючого завдання 3, що задається у разі необхідності оператором АСК, блока додавання та віднімання 4, блока пропорційної складової ПІД-регулятора 5, що включає блок системи ручного вибору коефіцієнта, до якої входять блок задавача початкового 6 та блок задавача керуючого 7 значень коефіцієнта пропорційної складової, блока інтегральної складової ПІД-регулятора 8 із інтегратором 9 та системою ручного вибору коефіцієнта 10, до якої входять блок задавача початкового 11 та блок задавача керуючого 12 значень коефіцієнта інтегральної складової, блока диференціальної складової ПІД-регулятора 13 із диференціатором 14 та системою ручного вибору коефіцієнта 15, до якої входять блок задавача початкового 16 та блок задавача керуючого 17 значень коефіцієнта диференціальної складової, система ручного вибору сигналу управління 18, що може надходити як з ПІД-регулятора, так і з керуючого завдання, сформованого оператором за допомогою задавача, блока суматора 19, блока індикації розузгодження 20, блока множення та ділення 21, блока індикації відносного значення розузгодження 22. До складу системи автоматичного керування на фіг. 2 окрім ПІД-регулятора із змінними коефіцієнтами настроювання та змінним завданням, входить блок формування сигналу збурення 23, блок додавання та віднімання 24, блок передавальної функції об'єкта регулювання 3 UA 118161 U 5 10 15 20 25 30 35 40 45 50 55 25, блок затримання сигналу 26, блок виводу передавальної функції регульованого параметра системі 27. Один із виходів блока 1 з'єднаний із відповідним входом блока 4, на другий вхід якого підключений один із виходів блока 26. Один із виходів блока 4 підключений до входу блока 20, другий - до одного із входів блока 21, інший вхід якого з'єднаний із одним із виходів блока 2. Єдиний вихід блока 21 з'єднаний із входом блока 22. Єдиний вихід блока 2 з'єднаний із одним із входів блока 1. Один із виходів блока 3 з'єднаний із другим входом блока 1. Інший вихід блока 3 з'єднаний із одним із входів блока 18, другим входом якого з'єднаний єдиний вихід блока 19. Останній вихід блока 4 паралельно з'єднаний із входами блоків 7, 12, 17, 6, 11, 16. Виходи блоків 7, 12, 17 з'єднані із одним із двох входів відповідно блоків 5, 10, 15. Виходи блоків 6, 11, 116 з'єднані із другим входом відповідно блоків 5, 10, 15. Єдині виходи блоків 10 та 15 відповідно з'єднані із єдиними входами блоків 9 та 14. Єдині виходи блоків 5, 9 та 14 паралельно з'єднані із входами блока 19. Єдиний вихід блока 18 з'єднаний із одним із входів блока 24, другим входом якого є вихід блока 23. Єдиний вихід блока 24 з'єднаний із входом блока 25, який у свою чергу з'єднаний із входом блока 26, другий вихід якого підключений до єдиного входу блока 27. Запропонований пристрій ідентифікації діяльності оператора автоматизованої системи керування із ПІД-регулятором працює наступним чином: 1. На початку роботи пристрою ідентифікації діяльності оператора автоматизованої системи керування із ПІД-регулятором оператор вибирає як режим сигналу r(t ) завдання 1 режим використання початкового завдання, що задається задавачем 2, та як режим сигналу u(t ) управління 18, який буде надходити на об'єкт регулювання 21, режим подання сигналу з ПІДрегулятора. 2. Значення регульованого параметра як вихідний сигнал блока затримання сигналу 22 надходить до блока додавання та віднімання 4, який здійснює віднімання виміряного значення регульованого параметра y(t ) від його завдання r(t ) . 3. Результуюче значення розузгодження із блока додавання та віднімання 4 надходить до блока пропорційної 5, інтегральної 8, диференціальної 13 складових ПІД-регулятора із змінними коефіцієнтами, а з них - на блок суматора 19, сигнал з виходу якого є вихідним для регулятора. 4. Вихідний сигнал регулятора згідно з вибраним режимом сигналу управління 18 надходить на блок додавання та віднімання 24, який здійснює віднімання вихідного сигналу регулятора від сигналу d(t ) , сформованого у блоці збурення 23. 5. Вихідний сигналрегулятора здійснює такий вплив на об'єкт регулювання u(t ) (блок передавальної функції об'єкту регулювання 25, блок затримання сигналу 26), щоб сигнали абсолютного (t ) r(t ) y(t ) та відносного ( t ) розузгодження (блоки 20, 22) на виході блока r( t ) додавання та віднімання наближався до нуля. 6. У разі отримання незадовільного з точки зору оператора значення сигналу розузгодження оператор приймає рішення про зміну режиму роботи система ідентифікації оператора автоматизованої системи управління із ПІД-регулятором, а саме вибирає у ручному режимі один з наступних режимів її роботи: передкритичного першого роду: задавання керуючих значень коефіцієнтів пропорційної, інтегральної та/або диференціальної складових (блоки 8, 12, 15); передкритичного другого роду: задавання керуючих значень коефіцієнтів пропорційної, інтегральної та/або диференціальної складових (блоки 8, 12, 15) та керуючого значення завдання 3; критичного: вибору сигналу управління 18, за який буде використовуватися керуюче завдання, сформованого оператором за допомогою задавача 3. Числовий приклад використання пристрою для ідентифікації діяльності оператора автоматизованої системи керування із ПІД-регулятором приведений у таблиці 1. Як об'єкт керування у наданому прикладі використовується аперіодична ланка першого порядку та ланка 1 .5 чистого запізнювання Wo (S) e S , як сигнал збурення використано блок одиничного 1 .5 S 1 ступінчастого впливу. Початкові значення коефіцієнтів пропорційної, інтегральної та диференціальної складових вибрано згідно із [Котляров Р. В., Ямпольский А.А. Исследование систем автоматического управления, классической - одноконтурной, а также интеллектуальной с Fuzzy-регулятором, matlab.exponenta.ru/simulink/book3/6.php]. 4 UA 118161 U 5 10 Зведені у таблиці 1 по результатах імітаційного експерименту статистичні дані свідчать про наступне: 1) перша група статистичних даних (№ 1-8) характеризує результати поведінки людиниоператора у ситуації, коли рівень його експертних знань та опиту дозволив ідентифікувати феномен недостатньої (виходячи із конкретних потреб роботи АСК) швидкості досягнення системою необхідної величини сигналу розузгодження. Наприклад, підвищення вимог щодо часу Т стабілізації показників системи (зменшення його в 1.5 разу - з Т=15 до Т=10) викликає збільшення величини розузгодження у 44 рази. Ця ситуація може бути ідентифікована оператором як передкритична першого роду та свідчити про необхідність прийняття рішення щодо виконання функцій стабілізації роботи АСК в режимі підвищених вимог до часу регулювання. Таблиця 1 Режим Ситу№ вибору ація експериАСК менту r( t ) r(i) Режим Режим вибору вибору Kp u(t ) Kp Режим Режим вибору 1/ TI вибору 1/ TI Td Початковий вигляд передаточної функції об'єкта керування Wo (S) Передкритична Критична 1 2 3 4 5 6 7 8 П П П П П П П П 4 4 4 4 4 4 4 4 ПУ ПУ ПУ ПУ ПУ ПУ ПУ ПУ П П О О О О О О 1.093 1.093 0.990 0.990 0.990 0.990 0.990 0.990 П П П П О О О О 0.86 0.86 0.86 0.86 0.66 0.66 0.66 0.66 П П П П П П О О Td (t ) 1 .5 e S 1 .5 S 1 0.209 0.0042 0.209 0.1879 0.209 0.0059 0.209 0.1158 0.209 0.0017 0.209 0.0161 0.27 0.00006 0.27 0.0016 Час досягнення завдання 15 10 15 10 15 10 15 10 1.5 e S S 1.5 S 1 9 П 4 ПУ п 1.093 П 0.86 П 0.209 64.29 30 10 П 4 ПУ 0 0.990 О 0.66 О 0.27 2.27 30 11 П 4 ПУ о 0.6 О 0.44 О 0.4 0.005 15 12 П 4 ПУ 0 0.6 О 0.44 О 0.4 0.034 10 13 О 2 ПУ 0 0.6 О 0.44 О 0.4 0.00234 10 Використання виконавчих механізмів впливу оператора на об'єкт управління при 1.5 Wo (S) e S 2 S 1.5 S 1 14 О 7.331 ОУ 0 0.6 О 0.44 О 0.4 0.0035 15 15 О 7.331 ОУ 0 0.6 О 0.44 О 0.4 0.0015 10 16 О 7.35907 ОУ 0 0.6 О 0.44 О 0.4 0.0023 8 Зміна поведінки об'єкта керування Wo (S) 2 Скорочення, що використовуються у таблиці: П - режим використання початкових значень; О - режим використання значень, введених оператором; ПУ - режим використання сигналу управління з ПІД-регулятора; ОУ - режим використання сигналу управління, сформованого оператором. 15 20 У пристрої, що заявляється, вирішення даної проблеми передбачається шляхом надання оператору можливості ручного вибору режиму роботи, що дозволяє задавати керуючі значення коефіцієнтів пропорційної, інтегральної та/або диференціальної складових (блоки 8, 12, 15) ПІДрегулятору. Результати послідовної зміни оператором значень коефіцієнтів пропорційної, інтегральної та/або диференціальної складових, наведені у прикладі, демонструють можливість зменшення величини сигналу розузгодження більш ніж у 2.6 разу за умови зменшення часу її досягнення в 1.5 разу. Ступінь достатності рівня швидкості прийняття оператором рішень та рівень його професіоналізму у вирішенні подібних ситуацій можуть бути ідентифіковані шляхом виміру 5 UA 118161 U 5 10 15 20 25 30 35 показників оперативності та точності урегулювання нестабільної ситуації у системі (наприклад, показника кількості кроків зміни оператором значень коефіцієнтів ПІД-регулятора щодо наближення до необхідної величини сигналу розузгодження при обмеженні часу її досягнення). 2) Друга група статистичних даних (№ 9-13) характеризує результати діяльності оператора у випадку, коли різка зміна розміру сигналу розузгодження (наприклад, збільшення його з (t ) =0.0016 до (t ) =64.2) може бути розпізнано оператором як розузгодження у поведінці самого об'єкта керування (наприклад, у пристрою, що заявляється, - зміна перехідної функції, яка характеризує його роботу). Здібності оператора щодо оперативності прийняття рішень повинні дозволити оператору ідентифікувати поточну ситуацію як передкритичну другого роду, яка потребує швидкого прийняття рішення щодо комплексного використання інструментів задання керуючих значень коефіцієнтів пропорційної, інтегральної та/або диференціальної складових (блоки 8, 12, 15) ПІДрегулятору та керуючого значення завдання 3. Результати послідовної (тобто не обмеженої у часі) зміни оператором значень коефіцієнтів пропорційної, Інтегральної та/або диференціальної складових, а також спроби змінити значення завдання у наведеному прикладі демонструють можливість досягнути зменшення величини сигналу розузгодження більш ніж у 27952.17 навіть за умови додаткових вимог щодо зменшення часу її досягнення в 1.5 разу. Ідентифікація рівня професійних здібностей оператора щодо якісного усунення ситуації, що склалася, також може бути виконана на підставі виміру показника кількості кроків щодо стабілізації величини сигналу розузгодження. 3) Третя група статистичних даних (№ 14-15) характеризує поведінку оператора у випадку, коли різка зміна розміру сигналу розузгодження потребує миттєвого коригування. Насамперед сукупність особистісних якостей щодо рішучого прийняття рішення у комбінації із наявністю експертних знань та опиту щодо вирішення подібних ситуацій та достатня скорості прийняття рішення дозволяє оператору ідентифікувати ситуацію як критичну та застосовувати власні виконавчі механізми впливу на об'єкт управління в реальному масштабі часу. Ідентифікація професійних здібностей оператора щодо якісного та швидкого усунення критичної ситуації, що склалася, може бути виконана на підставі наявності у оператора здібності у лімітований час - тобто шляхом прийняття одного вірного рішення щодо зміни величини завдання та використання його безпосередньо у якості сигналу управління стабілізувати величину сигналу розузгодження. Таким чином, запропонований пристрій ідентифікації діяльності оператора автоматизованої системи керування із ПІД-регулятором дозволить підвищити якість регулювання параметрів багатьох технологічних процесів через використання експертних знань та навичок прийняття рішень людини-оператора, особливо у ситуаціях, коли закони управління, реалізовані в ПІДрегуляторі, погано або зовсім не справляються із завданням стабілізації системи. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 50 55 60 Пристрій ідентифікації діяльності оператора автоматизованої системи керування із ПІДрегулятором зі змінними коефіцієнтами настроювання, який містить задавач завдання, елемент віднімання, пропорційну, інтегральну, диференціальну складові, суматор та ПІД-регулятор, обладнаний системою вибору одного із двох можливих коефіцієнтів пропорційної, інтегральної та диференціальної складових, який відрізняється тим, що вибір можливих коефіцієнтів пропорційної, інтегральної та диференціальної складових виконується оператором вручну із сукупностей: початкових значень коефіцієнтів ПІД-регулятора, що задаються за допомогою задавачів початкових значень на початку роботи АСК; керуючих значень, що у разі необхідності задаються безпосередньо оператором АСК за допомогою задавачів керуючих значень коефіцієнтів пропорційної, інтегральної та диференціальної складових; пристрій додатково містить блоки визначення та індикації розміру розузгодження як результат розрахунку відхилення значення регульованого параметра від його завдання; пристрій додатково обладнаний системою ручного вибору одного із двох можливих варіантів задання сигналу управління - вихідного сигналу ПІД-регулятору або безпосередньо керуючого сигналу, сформованого оператором; пристрій додатково обладнаний системою ручного оператора одного з трьох можливих варіантів задання завдання, а саме: початкового значення сигналу завдання, що задається на початку роботи АСК, використовується для обчислення величини сигналу розузгодження, а результат цього обчислення подається на вхід ПІД-регулятора; змінного завдання, що задається оператором АСК у разі ідентифікації їм передкритичної ситуації, використовується для обчислення величини сигналу розузгодження, а результат цього 6 UA 118161 U обчислення подається на вхід ПІД-регулятора, керуючого завдання, що задається оператором АСК у разі ідентифікації їм критичної ситуації для безпосереднього подання як сигнал управління на вхід об'єкта. Комп’ютерна верстка В. Мацело Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G06F 7/00, G05B 11/01
Мітки: пристрій, під-регулятором, автоматизованої, керування, ідентифікації, системі, оператора, діяльності
Код посилання
<a href="https://ua.patents.su/9-118161-pristrijj-identifikaci-diyalnosti-operatora-avtomatizovano-sistemi-keruvannya-iz-pid-regulyatorom.html" target="_blank" rel="follow" title="База патентів України">Пристрій ідентифікації діяльності оператора автоматизованої системи керування із під-регулятором</a>
Спосіб ремонту автоматизованої системи керування і обробки інформації виробу 9с18
Номер патенту: 26090
Опубліковано: 10.09.2007
Автори: Матвійчук Володимир Іванович, Захрабов Микола Нурушевич, Іванченко Валерій Олександрович, Федяєв Сергій Максимович
МПК: G01S 7/00, G01S 13/00, H02K 15/00
Мітки: виробу, керування, ремонту, автоматизованої, 9с18, обробки, спосіб, інформації, системі
Формула / Реферат:
1. Спосіб ремонту автоматизованої системи керування і обробки інформації виробу 9С18, при якому здійснюють введення машини з розташованим у ній виробом 9С18, у якому розміщена автоматизована система керування і обробки інформації, у ремонтний комплекс, здійснюють технологічні операції з відкриття кришок технологічних відсіків, шаф і стелажів автоматизованої системи керування і обробки інформації, проводять очищення шаф і стійок від пилу і...
Спосіб автоматичної самодіагностики автоматизованої системи керування технологічним об’єктом
Номер патенту: 92363
Опубліковано: 11.08.2014
Автори: Алексєєв Михайло Олександрович, Сироткіна Олена Ігорівна
МПК: G05B 17/00, G06F 11/25, G06F 11/07, G05B 13/02
Мітки: об'єктом, керування, автоматичної, самодіагностики, автоматизованої, спосіб, технологічним, системі
Формула / Реферат:
Спосіб автоматичної самодіагностики автоматизованої системи керування технологічним об'єктом, який полягає в тому, що контролюють дані експлуатаційного режиму технологічного об'єкта управління за допомогою безлічі контурів управління автоматизованої системи керування, аналізують дані експлуатаційного режиму в кожному контурі управління за допомогою підпрограм управління, автоматично генерують модель процесу технологічного об'єкту управління,...
Пристрій адаптивного керування релейним регулятором струму трифазного силового активного фільтра
Номер патенту: 92932
Опубліковано: 10.09.2014
Автори: Бялобржеський Олексій Володимирович, Власенко Руслан Володимирович
Мітки: трифазного, керування, фільтра, силового, активного, адаптивного, регулятором, пристрій, струму, релейним
Формула / Реферат:
Пристрій адаптивного керування релейного регулювання струму трифазного силового активного фільтра, що містить трифазний транзисторний перетворювач, силовий вхід якого з'єднаний з мережею живлення через вхідний дросель і блок датчиків струмів силового активного фільтра, накопичувальний конденсатор, підключений до силового виходу транзисторного перетворювача, блок датчиків фазної напруги мережі, силовий вхід якого підключений до трифазної...
Пристрій автоматичного керування регулятором напруги
Номер патенту: 37686
Опубліковано: 15.05.2001
Автори: Трунова Ірина Михайлівна, Савченко Петро Ілліч, Фурман Ілля Олександрович, Ремез Віталій Віталійович
МПК: H02M 5/02
Мітки: регулятором, пристрій, автоматичного, напруги, керування
Текст:
...Сигнал Yij є і вхідним сигналом, що вводиться в мікроконтролер 6 для визначення відповідного заданого оптимального значення напруги живлення електрообладнання даного типового варіанту одночасної його експлуатації, тобто: Yij=Xij. В мікроконтролері 6 здійснюється порівняння значення напруги Uвх на вході регулятора напруги 1 з оптимальним значенням для даного типового варіанту одночасної експлуатації електрообладнання Uопт і з...
Спосіб здійснення координованої роботи периферійних пристроїв у складі автоматизованої системи керування дорожнім рухом з використанням інформаційних пакетів
Номер патенту: 30620
Опубліковано: 11.03.2008
Автор: Щуренко Юрій Олександрович
МПК: G08G 1/01
Мітки: спосіб, автоматизованої, роботи, пакетів, системі, використанням, інформаційних, координованої, дорожнім, здійснення, керування, пристроїв, складі, рухом, периферійних
Формула / Реферат:
1. Спосіб здійснення координованої роботи периферійних об'єктів з центром керування в автоматизованих системах керування дорожнім рухом, який здійснюють шляхом передачі керуючих пакетів команд по каналах зв'язку, який відрізняється тим, що канал зв'язку утворюють періодично з одночасною синхронізацією таймерів периферійних пристроїв і центра керування та передачею керуючого пакета програм.2. Спосіб за п. 1, який відрізняється тим, що...
Попередній патент: Коаксіальний вітроелектромеханічний нагрівач
Наступний патент: Ківш екскаватора з гідравлічним пульсатором
Випадковий патент: Спосіб дозування яєць комах та пристрій для його реалізації