Спосіб обчислення автокореляційної функції сигналу некогерентного розсіяння за допомогою багатоканального пристрою
Номер патенту: 120837
Опубліковано: 27.11.2017
Автори: Пуляєв Валерій Олександрович, Ємельянов Леонід Якович, Рогожкін Євген Васильович


Формула / Реферат
Спосіб обчислення автокореляційної функції сигналу некогерентного розсіяння за допомогою багатоканального пристрою, що здійснює паралельний кореляційний аналіз в реальному часі, на виході якого при використанні передавачем радіолокатора для вертикального (або з нахилом променя) зондування іоносфери радіоімпульсу з прямокутною обвідною і довжиною ![]() ,
,
де ![]() - кількість кореляційних каналів,
- кількість кореляційних каналів,
![]() - елементарний часовий зсув при розрахунках ординат автокореляційної функції, що вибирається з оглядом на фізичні особливості іоносферної плазми, на виході всіх каналів відносно поточної висотної ділянки протяжністю
- елементарний часовий зсув при розрахунках ординат автокореляційної функції, що вибирається з оглядом на фізичні особливості іоносферної плазми, на виході всіх каналів відносно поточної висотної ділянки протяжністю ![]() , яка має центр на висоті (дальності)
, яка має центр на висоті (дальності) ![]() ,
,
де ![]() - затримка сигналу у часі на радіолокаційній розгортці відносно моменту випромінювання радіоімпульсу, а
- затримка сигналу у часі на радіолокаційній розгортці відносно моменту випромінювання радіоімпульсу, а ![]() - швидкість світла,
- швидкість світла,
одночасно присутні значення ![]() ненормованих ординат автокореляційної функції, які пристрій розраховує згідно з виразом:
ненормованих ординат автокореляційної функції, які пристрій розраховує згідно з виразом:
![]() ,
,
де ![]() - квантовані (цифрові) значення сигналу розсіяння, які надходять з кроком
- квантовані (цифрові) значення сигналу розсіяння, які надходять з кроком ![]() ,
, ![]() - поточний номер ординати,
- поточний номер ординати,
який відрізняється тим, що, не погіршуючи висотного розрізнення, для тієї ж висотної ділянки за рахунок вводу у пристрій ![]() допоміжних кореляційних каналів та елементів зв'язку між ними, отримують додаткові значення ординат автокореляційної функції сигналу розсіяння згідно з виразом:
допоміжних кореляційних каналів та елементів зв'язку між ними, отримують додаткові значення ординат автокореляційної функції сигналу розсіяння згідно з виразом:
![]() ,
,
які дозволяють зменшити статистичну похибку обчислень та врахувати форму висотного профілю сигналу розсіяння при використанні процедури накопичення:
![]() .
.
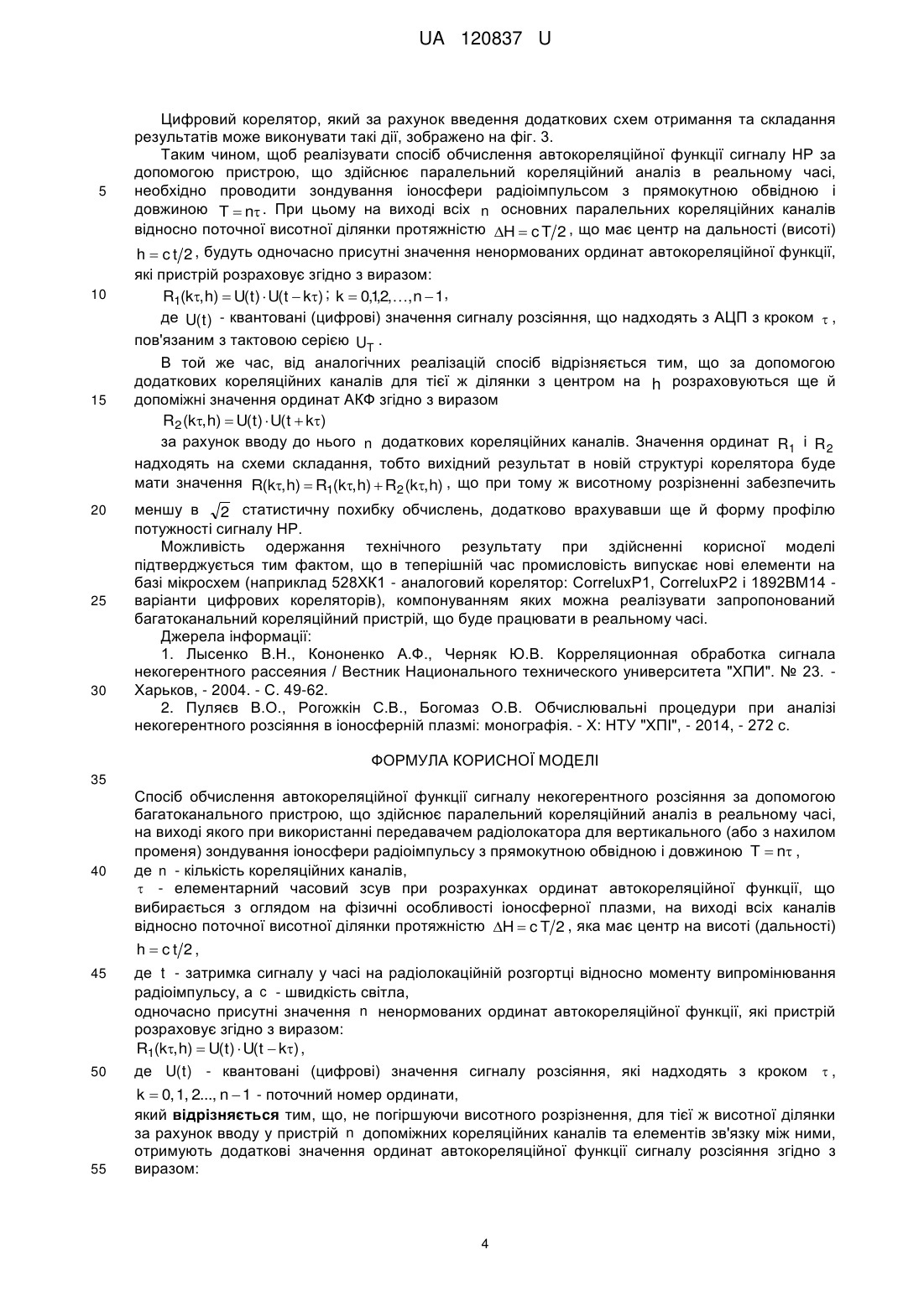
Текст
Реферат: Спосіб обчислення автокореляційної функції сигналу некогерентного розсіяння за допомогою багатоканального пристрою, що здійснює паралельний кореляційний аналіз в реальному часі, на виході якого при використанні передавачем радіолокатора для вертикального (або з нахилом променя) зондування іоносфери радіоімпульсу з прямокутною обвідною і довжиною T n , де n - кількість кореляційних каналів, - елементарний часовий зсув при розрахунках ординат автокореляційної функції, що вибирається з оглядом на фізичні особливості іоносферної плазми, на виході всіх каналів відносно поточної висотної ділянки протяжністю H c T 2 , яка має центр на висоті (дальності) h ct 2, де t - затримка сигналу у часі на радіолокаційній розгортці відносно моменту випромінювання радіоімпульсу, а c - швидкість світла, одночасно присутні значення n ненормованих ординат автокореляційної функції, які пристрій розраховує згідно з виразом: R1(k, h) U(t ) U(t k) , де U( t ) - квантовані (цифрові) значення сигналу розсіяння, які поступають з кроком , k 0, 1, 2,, n 1 - поточний номер ординати. Не погіршуючи висотного розрізнення, для тієї ж висотної ділянки за рахунок вводу у пристрій n допоміжних кореляційних каналів та елементів зв'язку між ними, отримують додаткові значення ординат автокореляційної функції сигналу розсіяння згідно з виразом: R2 (k, h) U(t) U(t k) , які дозволяють зменшити статистичну похибку обчислень та врахувати форму висотного профілю сигналу розсіяння при використанні процедури накопичення: R(k, h) R1(k, h) R2 (k, h) . UA 120837 U (54) СПОСІБ ОБЧИСЛЕННЯ АВТОКОРЕЛЯЦІЙНОЇ ФУНКЦІЇ СИГНАЛУ НЕКОГЕРЕНТНОГО РОЗСІЯННЯ ЗА ДОПОМОГОЮ БАГАТОКАНАЛЬНОГО ПРИСТРОЮ UA 120837 U UA 120837 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до радіолокації, зокрема до методів вимірювань кореляційних характеристик розсіяних іоносферною плазмою сигналів, які як відбиття повертаються до приймача імпульсного радіолокатора при зондуванні ним іоносфери в методі некогерентного розсіяння (HP) радіохвиль. Ця модель призначена для покращення статистики за рахунок збільшення кількості обчислень ординат автокореляційної функції (АКФ) сигналу HP, і що є базовою в подальших розрахунках низки параметрів іоносфери (кінетичних температур іонів і електронів, іонного складу, тощо). АКФ розраховується на кожній ділянці дальності (або висотній ділянці - для випадку вертикального зондування), протяжність якої уздовж напрямку зондування характеризує довжину імпульсного об'єму розсіяння в зоні дії діаграми спрямованості антен. Нові обчислення стають можливими за рахунок вводу допоміжних кореляційних каналів у багатоканальний пристрій, призначений для роботи в режимі реального часу. З їхньою допомогою для кожної ділянки дальності отримують додаткову інформацію, яка дозволяє зменшити статистичну похибку обчислень ординат АКФ, не використовуючи методи, що погіршують висотне або часове розрізнення. Задача розробки - підвищення точності розрахунку АКФ сигналу розсіяння у реальному часі при радіофізичних дослідженнях навколоземного космічного простору, що сприяє оптимальному розв'язанню наукових і практичних задач у таких галузях, як радіозв'язок, супутниковий зв'язок, поширення радіохвиль, навігація, радіолокація, геопозиціонування об'єктів тощо. Рівень техніки, який є корисним для розуміння запропонованої моделі, відображує єдиний у середніх широтах Європи унікальний Іоносферний зонд (http://iion.org.ua) Інституту іоносфери м. Харкова (свідоцтво НАН і МОН України № 34, серія МН, від 14.01.2009 р. про внесення Іоносферного зонду до Державного реєстру наукових об'єктів національного надбання України). На теперішній час актуальною проблемою є те, що його кореляційні пристрої обробки сигналу, задіяні в процесі радіозондування іоносфери в діапазоні висот 100-1000 км, потребують апаратно-алгоритмічних удосконалень, які б дозволили розширити інформаційні можливості цього унікального радіотехнічного інструменту без суттєвого збільшення об'єму апаратури радіолокатора в цілому. Розглянемо відомий спосіб-аналог [1, - С. 52], згідно з яким імпульсний радіолокатор (радар HP) в реальному часі вимірює ординати АКФ сигналу HP. Для вимірювання автокореляційних функцій зазвичай використовують пристрої, які отримали назву кореляторів. Якщо вони здійснюють паралельний кореляційний аналіз, то мають назву багатоканальних пристроїв реального часу. В кожному із їх n каналів (за номерами k 0,12,, n 1) розраховуються оцінки ординат кореляційної функції R(k) кожна для своїх , фіксованих затримок k 0, ,2,,(n 1) , де - крок за затримкою (елементарний часовий зсув). Такий розрахунок відбувається послідовно для кожної поточної ділянки, що мають центри на висотах (дальностях) h c t 2 (тут і далі t - радіолокаційна затримка сигналу на розгортці відносно моменту випромінювання радіоімпульсу, а c - швидкість світла). Кількість ординат (каналів) n залежить від тривалості T радіоімпульсу зондування (який на практиці має прямокутну обвідну), а також кроку , який вибирається з оглядом на фізичні особливості іоносферної плазми. Наприклад, пристрій обробки радіолокатора Інституту іоносфери (вертикальний промінь) визначає до n 20 ординат АКФ, при цьому для радіозондування плазми у метровому діапазоні радіохвиль на частоті f0 158 МГц елементарний зсув має величину 40 мкс. В результаті цього тривалість радіоімпульсу зондування, що вибрана із співвідношення T n , дорівнює 800 мкс. Це значення дає можливість перекрити досліджуваний інтервал кореляції флуктуацій електронної концентрації для даного (100-1000 км) діапазону висот і частоти f0 , тобто дозволяє отримати АКФ на необхідному інтервалі затримок. Тривалість радіоімпульсу зондування при цьому задає висотне розрізнення H cT 2 120 км. А от радіолокатор HP обсерваторії Хайстек (США) для зондування використовує дециметровий діапазон ( f0 440 МГц). При цьому залучено значення 12 мкс, а значить - є можливість користуватися коротшим радіоімпульсом, тривалість якого за тієї ж кількості ординат АКФ відповідає задовільному висотному розрізненню до H 36 км. Процедура розрахунку ординат АКФ у кожному k-му кореляційному каналі способу-аналогу відбувається відповідно до виразу , R(k, h) U(t ) U(t k)dt ; k 0,12,, n 1, (1) tc 1 UA 120837 U 5 10 15 де U( t ) і U(t k) - сигнали розсіяння, що надходять в корелятор від ділянок з центрами на висотах h . Результати розрахунку АКФ для кожної ділянки статистично накопичуються від розгортки до розгортки протягом сеансу тривалістю t c . Недолік такого режиму обробки в тому, що хоч пристрій і дає можливість отримати максимально можливе висотне розрізнення H , яке задає імпульс зондування, проте не забезпечує потенційно можливу статистичну точність результату. Справа в тому, що сигнал розсіяння, будучи сам випадковим процесом, приймається на фоні зовнішніх та апаратурних шумів, і відношення сигнал/шум часто (а для висот вище 500 км практично завжди) менше, а то і значно менше за одиницю. У зв'язку з цим радари HP використовують антени з ефективними поверхнями у тисячі квадратних метрів, потужні (мегаватні) передавачі та надчутливі приймачі. Проте без використання ефективного статистичного підходу надійність даних все ж низька, і спосіб не можна назвати оптимальним. Найбільш близьким аналогом є спосіб [2, - С. 66]. Він також використовує ряд паралельно працюючих кореляційних каналів (фіг. 1), кожний з яких складається з лінії затримки та перемножувача, та реалізує одночасне обчислення всіх ординат АКФ, накопичуючи для кожної hi висотної ділянки результати в пам'яті (ОЗП). У цьому способі для покращення статистичної точності за рахунок такого накопичення АКФ в ОЗП теж погоджуються на погіршення часового розрізнення. Для часу, поки будуть реалізовані m радіолокаційних розгорток, та згідно з виразом: R(i) (k, h) U(i) ( t ) U(i) ( t k); 20 25 30 35 40 45 50 k 0,1 , (n 1); , , (2) i 1 2,, m , для кожної ділянки (висоти) протяжністю h c t 2 накопичуються результати, які утворюють сеанси тривалістю від декількох до десятків хвилин. У цьому способі статистичну точність розрахунку параметрів іоносфери додатково підвищують ще й за рахунок вторинної обробки. Для цього після накопичення інформації в ОЗП починається сортування ординат вздовж висоти, складання їх по висотним групам, корегування значень в залежності від форми профілю та ін. (див розд. 3 в [2]). Недоліком способу є те, то підвищення статистичної точності фактично досягається за рахунок погіршення висотного розрізнення, а це в методі HP не бажано, особливо при дослідженні нестаціонарних процесів в тонких іоносферних шарах D, Е, F1. Ще й видача кінцевого результату відсувається на деякий термін, тобто корелятор перестає працювати в режимі, близькому до online, що ускладнює задачу іоносферного моніторингу. Як результат, унеможливлюється оперативний аналіз стану іоносфери, коли рішення треба приймати миттєво про початок реєстрації швидкоплинних процесів в іоносферній плазмі (ефектів від вибухів, землетрусів, запусків ракет, від дії сонячного термінатору, магнітних збурень та ін.). В основу корисної моделі, що пропонується, поставлено задачу по усуненню недоліків способу-аналога, згідно з якою кореляційний пристрій радара HP буде видавати результати не тільки в реальному часі, але й при підвищеній статистичній точності обчислень, яка не визиває потреби в об'єднанні результатів від декількох висотних ділянок. Поставлена задача вирішується тим, що у способі обчислення автокореляційної функції сигналу некогерентного розсіяння за допомогою багатоканального пристрою, що здійснює паралельний кореляційний аналіз в реальному часі, на виході якого при використанні передавачем радіолокатора для вертикального (або з нахилом променя) зондування іоносфери радіоімпульсу з прямокутною обвідною і довжиною T n , де n - кількість кореляційних каналів, - елементарний часовий зсув при розрахунках ординат автокореляційної функції, що вибирається з оглядом на фізичні особливості іоносферної плазми, на виході всіх каналів відносно поточної висотної ділянки протяжністю H c T 2 , яка має центр на висоті (дальності) h ct 2, де t - затримка сигналу у часі на радіолокаційній розгортці відносно моменту випромінювання радіоімпульсу, а c - швидкість світла, одночасно присутні значення n ненормованих ординат автокореляційної функції, які пристрій розраховує згідно з виразом R1(k, h) U(t ) U(t k) , 2 UA 120837 U 5 10 15 20 25 30 35 40 45 50 де U( t ) - квантовані (цифрові) значення сигналу розсіяння, які надходять з кроком , k 0,12,, n 1 - поточний номер ординати, згідно з корисною моделлю, не погіршуючи , висотного розрізнення, для тієї ж висотної ділянки за рахунок вводу у пристрій n допоміжних кореляційних каналів та елементів зв'язку між ними, отримують додаткові значення ординат автокореляційної функції сигналу розсіяння згідно з виразом R2 (k, h) U(t ) U(t k) , які дозволяють зменшити статистичну похибку обчислень та врахувати форму висотного профілю сигналу розсіяння при використанні процедури накопичення R(k, h) R1(k, h) R2 (k, h) . Суть способу, що є об'єктом запропонованої корисної моделі, є такою. Якщо розглядати особливості поведінки елементів випадкового ряду, який відображує стаціонарний процес, то відомо, що його АКФ є парна, тобто R() R() . Для отримання автокореляційної функції у цьому випадку не має значення, як відбувається перемножування відліків сигналу, тобто відносно елемента із вибірки ряду U( t ) все одно, де знаходиться його пара, тобто це U(t k) чи U(t k) (див. фіг. 2). Результат накопичення цих множень у часі буде статистично однаковий. Що ж до некогерентно розсіяного іоносферою сигналу, то його відліки протягом висотних ділянок відображують поведінку вже нестаціонарного процесу, що пов'язано зі зміною з висотою параметрів іоносфери, тобто у цьому випадку АКФ буде несиметричною. А отже, розрахувавши обидві гілки АКФ, ми гарантуємо, що вони належать до однієї і тієї ж висотної ділянки протяжністю H . проте для різних її частин, тобто статистично доповнюють одна одну, та при цьому ще й відбувається врахування форми профілю потужності сигналу НР, який визначають електричні поля в іоносфері. Цю особливість розрахунків наглядно демонструє наведене на фіг. 2 графічне зображення процесу імпульсного зондування. На графічному матеріалі ілюструється, як просувається радіоімпульс зондування тривалістю в іоносфері на фоні висотного профілю потужності сигналу HP. Прийняті в моменти часу T (t k) відліки сигналу U прив'язані кожний до свого конкретного висотного положення радіоімпульсу. Ці положення вздовж висоти для наочності додатково поділені ще й на елементи hi , зв'язані з періодом проходження імпульсів опитування АЦП серією UT . Їх кількість (в даному випадку n=4) визначає кількість ординат АКФ, які у даному випадку можна отримати для однієї ділянки. При такому підході можна спостерігати, що кожне миттєве цифроване значення прийнятого сигналу U(t k) є суперпозиція елементарних сигналів, некогерентно розсіяних плазмою від ряду висотних елементів на своєму інтервалі H (розташовані по вертикалі забарвлені прямокутники на фіг. 2). Розглянемо момент часу, коли положення радіоімпульсу зондування збігається з висотами від h 4 до h7 (штрихове забарвлення). Для цього моменту часу корелятор (фіг. 1) згідно з формулою (2) може миттєво видати значення ординат АКФ сигналу розсіяння, які пов'язані з елементами, що належать тільки до ділянки H (більш темний колір зліва від положення імпульсу). Це тому, що відповідно до теорії розсіяння корелюють тільки отримані з однієї висоти складові, які входять до відліків від U(t 3) до U( t ) . Сигнали ж у вигляді складових від нижчих елементів висотних ділянок профіля (сірий колір) із-за того, що відстань між ними більше дебаєвського радіусу екранування (який має значення біля десятка сантиметрів), після перемножування обов'язково дадуть тільки некорельований шум. Пропозиція, як було сказано вище, зводиться до того, щоб одночасно використовувати й інші результати множення. Їх можна отримати, якщо додатково перемножувати U( t ) з відліками від U(t ) т) до U(t 3) згідно з виразом R1(k, h) U(t ) U(t k) . (3) При цьому буде отримана як корисна інформація від тієї ж висотної ділянки H на профілі (темний колір справа), а також і некорельований шум, але вже від висотних елементів вище. Оскільки результати двох таких перемножувань згідно виразів (2) і (3) практично незалежні, складання цих однойменних ординат призведе до поліпшення статистики обчислень, що еквівалентне збільшенню тривалості сеансу t c вдвічі, особливо при Pc 1 . Pш 3 UA 120837 U 5 10 15 20 25 30 Цифровий корелятор, який за рахунок введення додаткових схем отримання та складання результатів може виконувати такі дії, зображено на фіг. 3. Таким чином, щоб реалізувати спосіб обчислення автокореляційної функції сигналу HP за допомогою пристрою, що здійснює паралельний кореляційний аналіз в реальному часі, необхідно проводити зондування іоносфери радіоімпульсом з прямокутною обвідною і довжиною T n . При цьому на виході всіх n основних паралельних кореляційних каналів відносно поточної висотної ділянки протяжністю H c T 2 , що має центр на дальності (висоті) h c t 2 , будуть одночасно присутні значення ненормованих ординат автокореляційної функції, які пристрій розраховує згідно з виразом: R1(k, h) U(t ) U(t k) ; k 0,12,, n 1, , де U( t ) - квантовані (цифрові) значення сигналу розсіяння, що надходять з АЦП з кроком , пов'язаним з тактовою серією UT . В той же час, від аналогічних реалізацій спосіб відрізняється тим, що за допомогою додаткових кореляційних каналів для тієї ж ділянки з центром на h розраховуються ще й допоміжні значення ординат АКФ згідно з виразом R2 (k, h) U(t ) U(t k) за рахунок вводу до нього n додаткових кореляційних каналів. Значення ординат R1 і R 2 надходять на схеми складання, тобто вихідний результат в новій структурі корелятора буде мати значення R(k, h) R1(k, h) R2 (k, h) , що при тому ж висотному розрізненні забезпечить меншу в 2 статистичну похибку обчислень, додатково врахувавши ще й форму профілю потужності сигналу НP. Можливість одержання технічного результату при здійсненні корисної моделі підтверджується тим фактом, що в теперішній час промисловість випускає нові елементи на базі мікросхем (наприклад 528ХК1 - аналоговий корелятор: CorreluxP1, CorreluxP2 і 1892ВМ14 варіанти цифрових кореляторів), компонуванням яких можна реалізувати запропонований багатоканальний кореляційний пристрій, що буде працювати в реальному часі. Джерела інформації: 1. Лысенко В.Н., Кононенко А.Ф., Черняк Ю.В. Корреляционная обработка сигнала некогерентного рассеяния / Вестник Национального технического университета "XПИ". № 23. Харьков, - 2004. - С. 49-62. 2. Пуляєв В.О., Рогожкін С.В., Богомаз О.В. Обчислювальні процедури при аналізі некогерентного розсіяння в іоносферній плазмі: монографія. - X: НТУ "XПI", - 2014, - 272 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 45 50 55 Спосіб обчислення автокореляційної функції сигналу некогерентного розсіяння за допомогою багатоканального пристрою, що здійснює паралельний кореляційний аналіз в реальному часі, на виході якого при використанні передавачем радіолокатора для вертикального (або з нахилом променя) зондування іоносфери радіоімпульсу з прямокутною обвідною і довжиною T n , де n - кількість кореляційних каналів, - елементарний часовий зсув при розрахунках ординат автокореляційної функції, що вибирається з оглядом на фізичні особливості іоносферної плазми, на виході всіх каналів відносно поточної висотної ділянки протяжністю H c T 2 , яка має центр на висоті (дальності) h ct 2, де t - затримка сигналу у часі на радіолокаційній розгортці відносно моменту випромінювання радіоімпульсу, а c - швидкість світла, одночасно присутні значення n ненормованих ординат автокореляційної функції, які пристрій розраховує згідно з виразом: R1(k, h) U(t ) U(t k) , де U( t ) - квантовані (цифрові) значення сигналу розсіяння, які надходять з кроком , k 0, 1, 2..., n 1 - поточний номер ординати, який відрізняється тим, що, не погіршуючи висотного розрізнення, для тієї ж висотної ділянки за рахунок вводу у пристрій n допоміжних кореляційних каналів та елементів зв'язку між ними, отримують додаткові значення ординат автокореляційної функції сигналу розсіяння згідно з виразом: 4 UA 120837 U R2 (k, h) U(t) U(t k) , які дозволяють зменшити статистичну похибку обчислень та врахувати форму висотного профілю сигналу розсіяння при використанні процедури накопичення: R(k, h) R1(k, h) R2 (k, h) . 5 UA 120837 U Комп’ютерна верстка В. Мацело Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01S 13/95
Мітки: автокореляційної, обчислення, сигналу, багатоканального, допомогою, розсіяння, пристрою, некогерентного, функції, спосіб
Код посилання
<a href="https://ua.patents.su/8-120837-sposib-obchislennya-avtokorelyacijjno-funkci-signalu-nekogerentnogo-rozsiyannya-za-dopomogoyu-bagatokanalnogo-pristroyu.html" target="_blank" rel="follow" title="База патентів України">Спосіб обчислення автокореляційної функції сигналу некогерентного розсіяння за допомогою багатоканального пристрою</a>
Спосіб імітації висотного розподілу сигналу некогерентного розсіяння та завади
Номер патенту: 45547
Опубліковано: 10.11.2009
Автор: Богомаз Олександр Вікторович
МПК: G01S 13/95
Мітки: некогерентного, спосіб, розсіяння, завади, розподілу, висотного, імітації, сигналу
Формула / Реферат:
Спосіб імітації висотного розподілу сигналу некогерентного розсіяння та завади, що полягає у формуванні суміші шумоподібного сигналу та завади із заданими спектрами шляхом складання гармонічних сигналів з випадковими початковими фазами за виразом,де N та М - кількість гармонік, якими представлено сигнал та заваду, Aiсигн та Ajзав - значення спектральних...
Спосіб відновлення висотного профілю потужності сигналу некогерентного розсіяння
Номер патенту: 112018
Опубліковано: 25.11.2016
Автори: Рогожкін Євген Васильович, Пуляєв Валерій Олександрович
МПК: G01S 13/00
Мітки: спосіб, потужності, сигналу, розсіяння, некогерентного, висотного, відновлення, профілю
Формула / Реферат:
Спосіб відновлення висотного профілю потужності сигналу некогерентного розсіяння в іоносферній плазмі, форма якого розраховується в процесі роботи імпульсного радара некогерентного розсіяння у випадку, коли у системі обробки радара по відношенню до протяжності зондувального імпульсу , що рухається вздовж променя, задана кратність періоду
Спосіб імітації сигналу некогерентного розсіяння відповідно до стану та динаміки іоносферної плазми
Номер патенту: 58665
Опубліковано: 26.04.2011
Автори: Богомаз Олександр Вікторович, Козлов Сергій Сергійович, Пуляєв Валерій Олександрович, Мірошніков Артем Євгенійович, Ємельянов Леонід Якович
МПК: G01S 13/00
Мітки: імітації, динаміки, іоносферної, плазми, розсіяння, стану, сигналу, відповідно, некогерентного, спосіб
Формула / Реферат:
Спосіб імітації сигналу некогерентного розсіяння відповідно до стану та динаміки іоносферної плазми, який полягає у формуванні спектральної густини шляхом складання гармонічних сигналів з випадковими початковими фазами за виразомде
Багатоканальний пристрій для обчислення знакової функції
Номер патенту: 70338
Опубліковано: 11.06.2012
Автори: Албанський Іван Богданович, Заведюк Тетяна Олексіївна, Николайчук Ярослав Миколайович, Воронич Артур Романович
МПК: G06F 15/00
Мітки: обчислення, багатоканальний, пристрій, знакової, функції
Формула / Реферат:
Багатоканальний пристрій для обчислення знакової функції, що містить багатокаскадний регістр зсуву, керуючі входи каскадів якого об'єднані і підключені до першого виходу синхронізатора, другий вихід якого з'єднаний з керуючим входом аналого-цифрового перетворювача, інформаційний вхід якого є входом пристрою, і n каналів, кожен з яких містить елемент ВИКЛЮЧНЕ АБО, перші входи цих елементів всіх каналів об'єднані і підключені до інформаційного...
Спосіб високошвидкісного багатоканального передавання інформації з адаптацією використання смуги частот групового сигналу
Номер патенту: 116641
Опубліковано: 25.05.2017
Автори: Балашов Віталій Олександрович, Орєшков Василь Іванович, Ляховецький Леонід Михайлович
МПК: H04L 5/00, H04L 27/26
Мітки: передавання, смуги, інформації, багатоканального, спосіб, адаптацією, групового, високошвидкісного, частот, використання, сигналу
Формула / Реферат:
Спосіб високошвидкісного багатоканального передавання інформації з адаптацією використання смуги частот групового сигналу, яка полягає в оптимальному розподіленні передаваної інформації по каналах багатоканального модема за результатами вимірювань відношення сигнал/завада в каналах модема, що приводить до збільшення швидкості передавання даних, який відрізняється тим, що розрахунок розподілення передаваної інформації по каналах...
Попередній патент: Зносостійка високоміцна сталь
Наступний патент: Спосіб визначення пластичності малопластичних матеріалів
Випадковий патент: Спосіб та електрокальцинатор для прожарювання сипучого вуглецевого матеріалу