Спосіб відновлення висотного профілю потужності сигналу некогерентного розсіяння
Номер патенту: 112018
Опубліковано: 25.11.2016
Автори: Рогожкін Євген Васильович, Пуляєв Валерій Олександрович
Формула / Реферат
Спосіб відновлення висотного профілю потужності сигналу некогерентного розсіяння в іоносферній плазмі, форма якого розраховується в процесі роботи імпульсного радара некогерентного розсіяння у випадку, коли у системі обробки радара по відношенню до протяжності зондувального імпульсу ![]() , що рухається вздовж променя, задана кратність періоду
, що рухається вздовж променя, задана кратність періоду ![]() дискретизації зворотного сигналу розсіяння як
дискретизації зворотного сигналу розсіяння як ![]() , при цьому у системі обробки протягом сеансу (декілька хвилин) статистично накопичуються та звільняються від адитивних шумів на кожній і-й висотній ділянці відліки
, при цьому у системі обробки протягом сеансу (декілька хвилин) статистично накопичуються та звільняються від адитивних шумів на кожній і-й висотній ділянці відліки ![]() , що із-за використання довгого зондувального радіоімпульсу утворюють згладжений вздовж висоти
, що із-за використання довгого зондувального радіоімпульсу утворюють згладжений вздовж висоти ![]() профіль, причому у кожний відлік цього профілю, відповідно до імпульсного об'єму розсіяння та згідно із законом
профіль, причому у кожний відлік цього профілю, відповідно до імпульсного об'єму розсіяння та згідно із законом
![]() , (1)
, (1)
входить ряд складових відновлювального профілю потужності ![]() від ділянок за номерами
від ділянок за номерами ![]() ,
,
який відрізняється тим, що відліки ![]() сигналу розсіяння система обробки радара після сеансу накопичення спочатку сортує шляхом вибору такого діапазону висот, де відношення сигнал/шум більше одиниці та для якого, згідно із законом (1), має місце система у вигляді n рівнянь, а саме
сигналу розсіяння система обробки радара після сеансу накопичення спочатку сортує шляхом вибору такого діапазону висот, де відношення сигнал/шум більше одиниці та для якого, згідно із законом (1), має місце система у вигляді n рівнянь, а саме
 , (2)
, (2)
у які входять складові ![]() сигналу розсіяння з висотних ділянок за номерами
сигналу розсіяння з висотних ділянок за номерами ![]() ,
,
а потім система обробки радара з метою покращення у n раз висотного розрізнення розраховує ці складові шляхом рішення аналітичної функції у вигляді полінома (n-1)-го степеня вигляду
![]() , (3)
, (3)
який описує взаємні висотні зв'язки між складовими та для якого коефіцієнти ![]() знаходяться за допомогою стандартних методів розв'язання системи із n лінійних алгебраїчних рівнянь вигляду
знаходяться за допомогою стандартних методів розв'язання системи із n лінійних алгебраїчних рівнянь вигляду
 , (4)
, (4)
отриманої в результаті послідовної підстановки поліному (3) на місце кожної складової у рівнянні системи (2), і для якої є відомими всі елементи при коефіцієнтах, а саме
![]()
 .(5)
.(5)
Текст
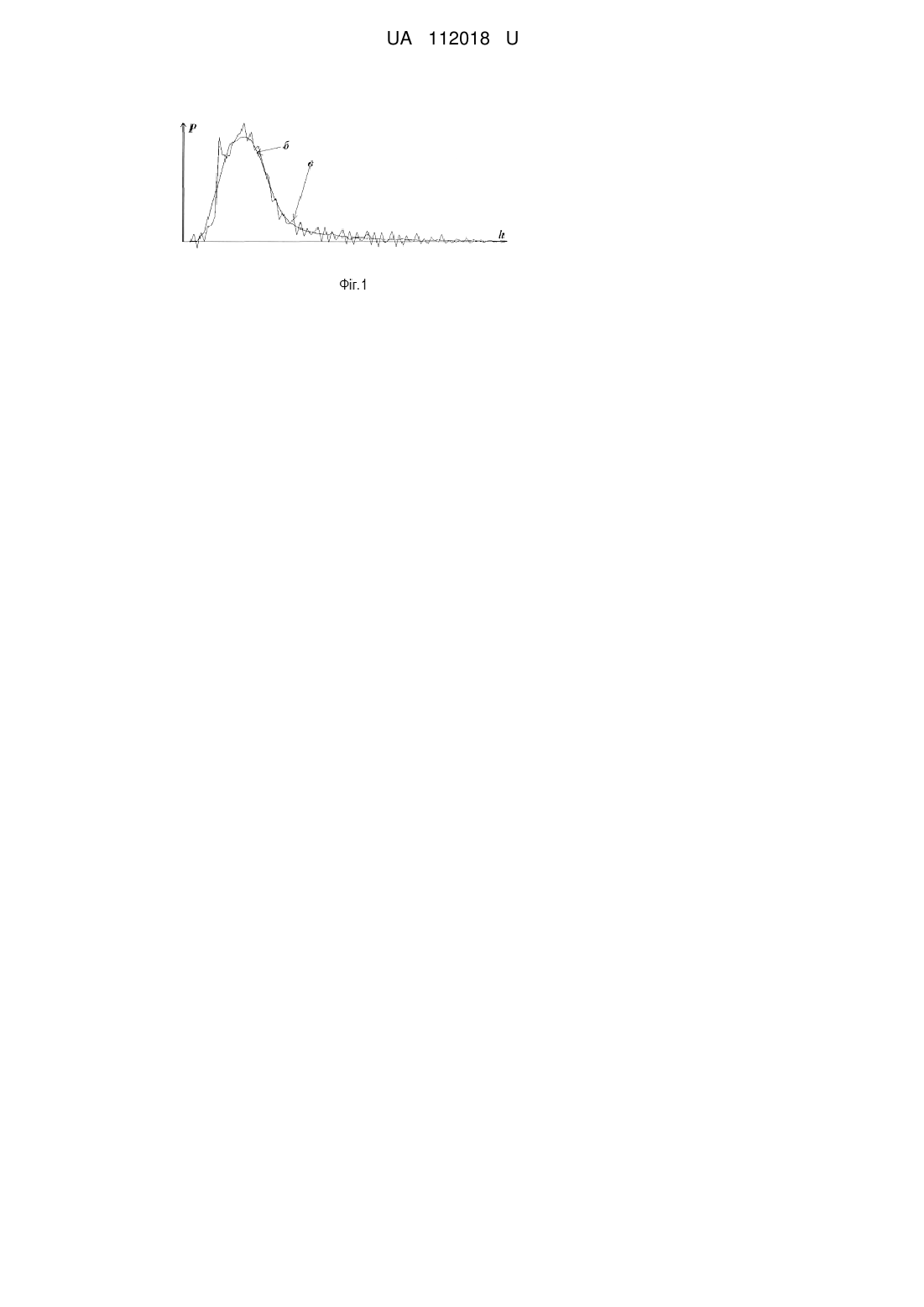
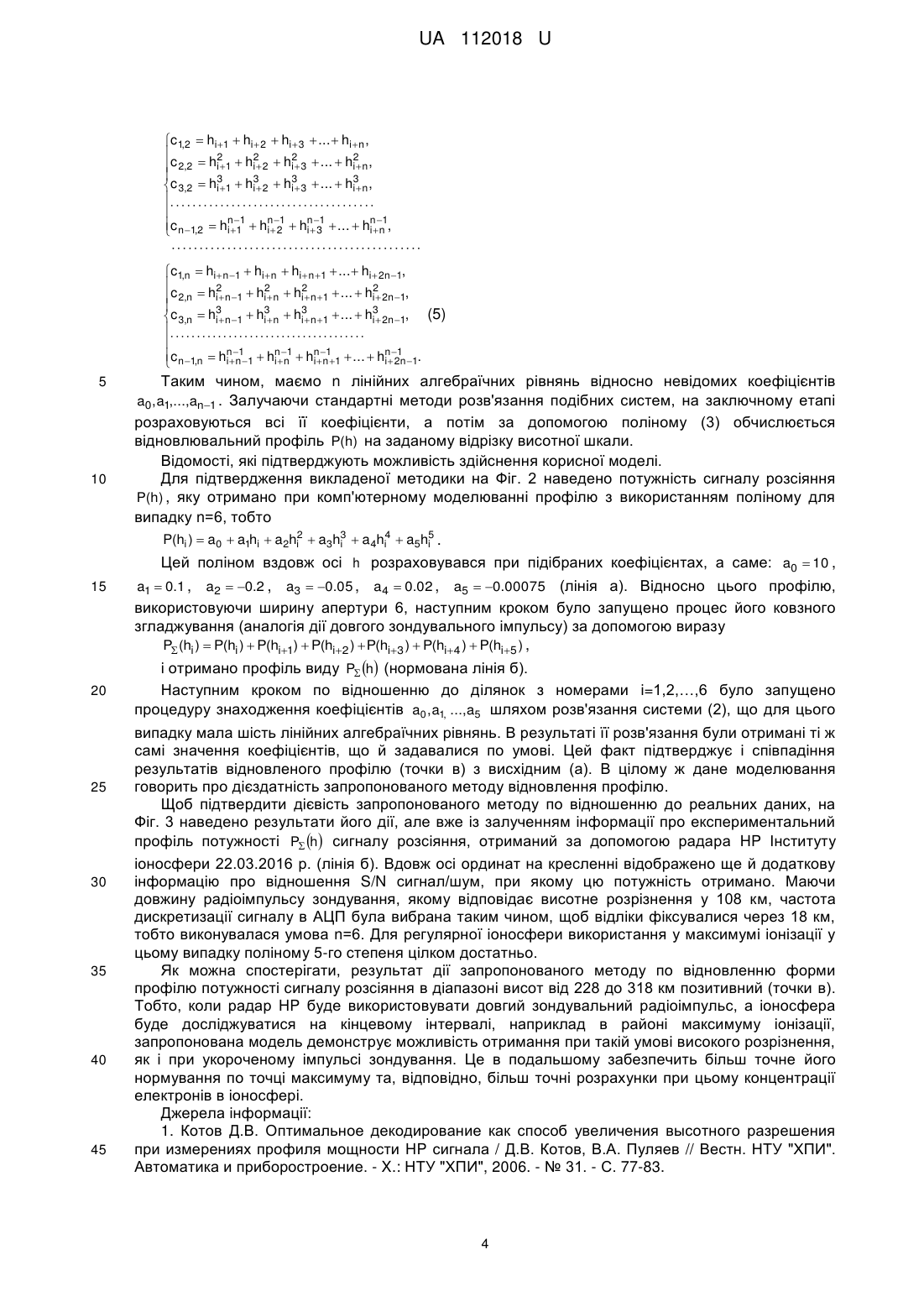
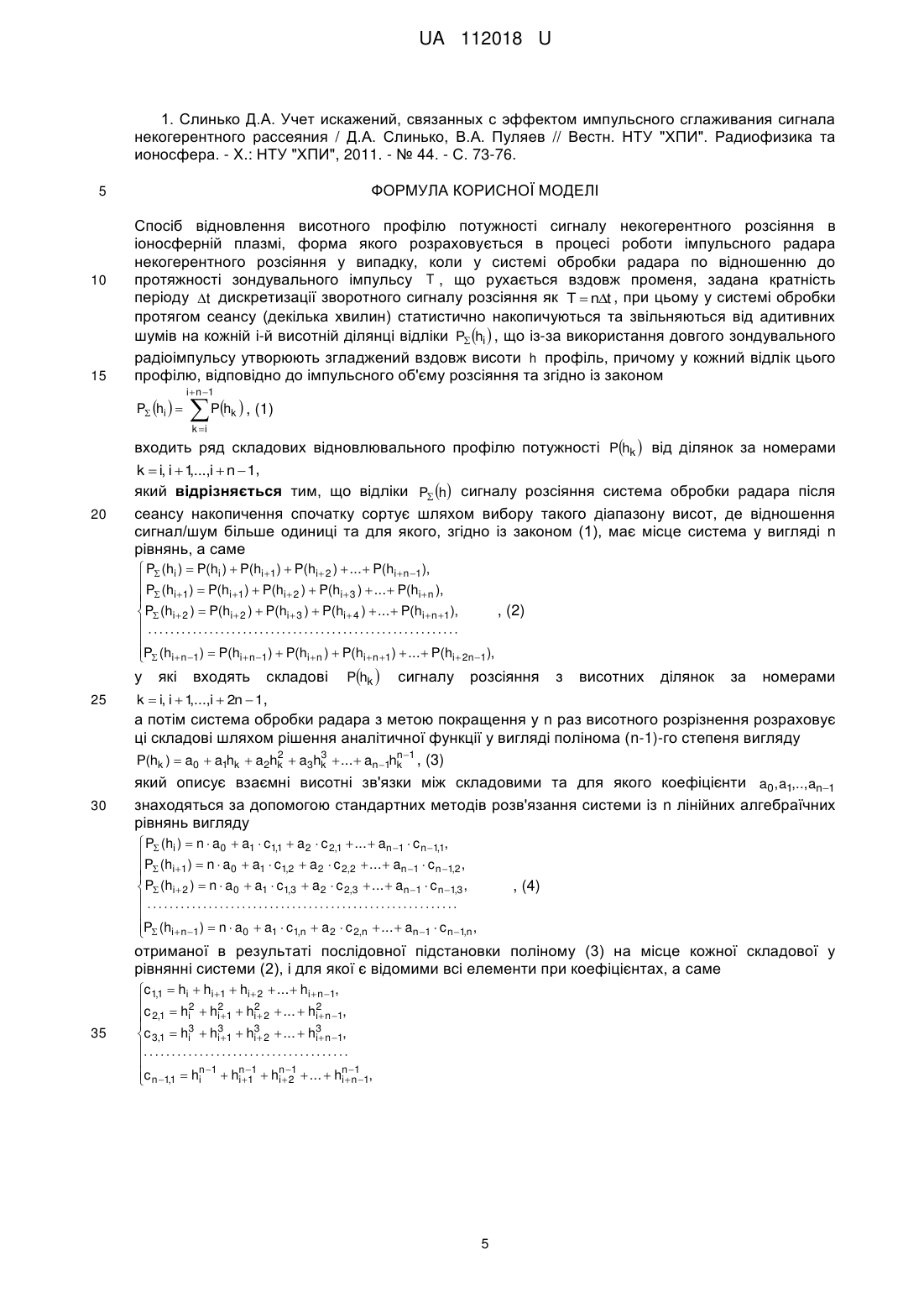
Реферат: Спосіб відновлення висотного профілю потужності сигналу некогерентного розсіяння в іоносферній плазмі, форма якого розраховується в процесі роботи імпульсного радара некогерентного розсіяння у випадку, коли у системі обробки радара по відношенню до протяжності зондувального імпульсу T , що рухається вздовж променя, задана кратність періоду t дискретизації зворотного сигналу розсіяння як T nt . У системі обробки протягом сеансу (декілька хвилин) статистично накопичуються та звільняються від адитивних шумів на кожній і-й висотній ділянці відліки P hi , що із-за використання довгого зондувального радіоімпульсу утворюють згладжений вздовж висоти h профіль. Відліки P h сигналу розсіяння система обробки радара після сеансу накопичення спочатку сортує шляхом вибору такого діапазону висот, де відношення сигнал/шум більше одиниці. UA 112018 U (54) СПОСІБ ВІДНОВЛЕННЯ ВИСОТНОГО ПРОФІЛЮ ПОТУЖНОСТІ СИГНАЛУ НЕКОГЕРЕНТНОГО РОЗСІЯННЯ UA 112018 U UA 112018 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до радіолокації, зокрема до методів радіотехнічних вимірювань статистичних характеристик сигналів, які отримують при зондуванні іоносфери у методі некогерентного розсіяння (HP) радіохвиль. Ця модель призначена для покращання висотного розрізнення при обчисленні профілю потужності сигналу некогерентного розсіяння, який є базою для розрахунку висотного розподілу концентрації електронів в іоносфері. Відновлення висотного профілю потужності, отриманого радаром HP, запропоновано за рахунок виділення кінцевого висотного діапазону та аналізу інформації на ньому із залученням аналітичної функції, що характеризується поліномом n-го степеня. Вона описує додаткові зв'язки між відновлювальними складовими потужності сигналу розсіяння від сусідніх іоносферних ділянок і дозволяє реалізувати процедуру, що компенсує ефект згладжування результатів із-за використання довгого зондувального радіоімпульсу. Мета розробки - зменшення похибок при дослідженнях іоносферних параметрів у навколоземному просторі, що є дуже актуальним для можливості оптимального розв'язання наукових і практичних задач у таких галузях, як радіозв'язок, супутниковий зв'язок, поширення радіохвиль, навігація, радіолокація, геопозиціонування об'єктів, тощо. Рівень техніки, який є корисним для розуміння запропонованої моделі, відображує єдиний на середніх широтах Європи унікальний Іоносферний зонд (http://iion.org.ua) Інституту іоносфери м. Харкова (свідоцтво НАН і МОН України № 34, серія МН, від 14.01.2009 р. про внесення Іоносферного зонду до Державного реєстру наукових об'єктів національного надбання України). Актуальною проблемою є те, що алгоритми обробки даних, подібні запропонованому способу та які використовуються у процесі радіозондування іоносфери, потребують вдосконалень, що дозволить розширити інформаційні можливості цього унікального радіотехнічного інструменту. Розглянемо відомий спосіб-аналог [1] відновлення висотних профілів потужності сигналу некогерентного розсіяння, які розраховує радіолокатор (радар HP) Іоносферного зонду. Цей спосіб дозволяє покращити висотне розрізнення за рахунок допоміжного аналізу зафіксованих приймачем радара цифрових відліків. У ньому суть розрахунків полягає у наступному. Так як, згідно з радіолокаційною теорією, іоносфера представляє собою безліч безперервно розподілених у просторі елементарних цілей (іонізованих часток), то при імпульсному випромінюванні зондуючої радіохвилі потужність зворотного розсіяння P h складається з суми складових Ph сигналу від тих висотних ділянок плазми, які у межах імпульсного об'єму захоплюються дискретами зондувального імпульсу. У цьому способі зондувальний імпульс розглядається як пара здвоєних дискрет зі змінною відстанню між ними. Представивши зондувальний імпульс як кодований, тобто у вигляді амплітудоманіпульованої послідовності, де елементи "1" - це активні дискрети, а "0" - проміжок між ними як неактивні дискрети, після накопичення радаром HP результатів використовується спеціальний алгоритм декодування (шляхом інвертування) одержуваних в системі обробки відліків. До цього ж з метою статистичного накопичення результатів передавач радара по черзі випромінює не один, а ряд таких амплітудо-маніпульованих імпульсів, і їх представляють уже у вигляді строк матриці. За рахунок сумарної дії цих імпульсів спосіб дає можливість мінімізувати вклад "заважаючих" сигналів, що не належать до досліджуваної висотної ділянки, і цим наблизити висотне розрізнення до значення, яке задає протяжність елементарної дискрети коду. Недолік такого режиму випромінювання передавача радара HP у тому, що введення нульових зондувальних дискрет імпульсу призводить до втрати ефективної випромінюваної потужності, тобто до зниження відношення сигнал/шум, що дуже критично для надійного виявлення та обробки сигналу в методі некогерентного розсіяння. Крім цього в даному способі мінімум вкладу потужностей від "заважаючих" ділянок не вдається перетворити повністю на нульовий, в результаті чого спосіб не можна назвати оптимальним. Найбільш близьким до способу, що пропонується - прототипом, є такий [2]. Спосіб базується на збільшенні енергії випромінювання, тобто на роботі радара HP вже з довгим зондувальним імпульсом і на спробі компенсувати спотворення, які визиває погіршення при цьому висотного розрізнення. У способі після випромінювання сигналу та статистичного накопичення (від розгортки до розгортки) результатів рекомендована допоміжна процедура. Вона зворотна ковзному згладжуванню, і у ній перетворення форми профілю потужності P h у неспотворений профіль Ph , тобто відновлення висотного розрізнення, передбачається за рахунок наступних дій. Відомо, що при просуванні довгого імпульсу вздовж висотного діапазону h прийняті на вході радара HP потужності сигналу розсіяння представляються відліками P h , які включають у себе 1 UA 112018 U 5 складові у вигляді потужностей Ph від ряду висотних шарів (ділянок) плазми у межах об'єму розсіяння. У прототипі приводиться приклад, що коли маємо достатню полосу частот фільтра приймача та встановлено період дискретизації сигналу в аналого-цифровому перетворювачі (АЦП) таким чином, щоб дотримувалася його кратність в 7 раз по відношенню до тривалості зондувального імпульсу, то зв'язок між P h і Ph на кожній і-й висотній ділянці, як результат ковзного згладжування профілю Ph , буде описуватися залежністю вигляду P (hi ) P(hi ) P(hi1) P(hi 2 ) ... P(hi 6 ) . (1) 10 15 20 25 30 35 40 У цьому способі обов'язковою умовою є те, щоб профіль P h вздовж висоти h був зафіксованим аж до самої верхньої ділянки, розташованої на висоті hi , де, реалізувавши у системі обробки операцію віднімання значень потужності адитивного шуму, можна було потужність сигналу розсіяння вже прийняти за нульову. Тоді на базі залежності (1) прототип рекомендує наступні математичні вирази, що дають можливість реалізувати аналітичну процедуру відновлення профілю "з нульового кінця", тобто процедуру, зворотну ковзному згладжуванню для ширини апертури у 7 елементів, а саме: P(hi 6 ) 0, P(hi 5 ) 0, P(h ) 0, i 4 P(hi 3 ) 0, обов' язкова умова : P (hi ) 0 P(hi 2 ) 0, P(hi1) 0, P(hi ) 0, P(hi1) P (hi1), P(h ) P (h ) P(h ), i2 i 1 i2 P(hi3 ) P (hi3 ) P(hi 2 ) P(hi1), P(hi 4 ) P (hi 4 ) P(hi3 ) P(hi 2 ) P(hi1), P(h ) P (h ) P(h ) P(h ) P(h ) P(h ), i5 i 4 i3 i 2 i 1 i5 P(hi ) P (h1) P(h2 ) P(h3 ) P(h4 ) P(h5 ). В результаті отримують новий профіль Ph , який відповідає висотному розрізненню, що забезпечив би укорочений у 7 раз імпульс зондування. Недоліком методу-прототипу є те, що дана процедура працює лише тоді, коли радар HP розраховує весь профіль потужності сигналу розсіяння (Фіг. 1 - результат відновлення профілю потужності сигналу НР «з кінця» в умовах статистичної невизначеності, лінія б), тобто вздовж всієї висотної шкали і обов'язково до появи його нульових значень. Але, як показує практика, шумоподібний характер корисного сигналу, прийнятого на фоні завад, коли відношення сигнал/шум менше одиниці, визиває в кінці профілю P h статистичні флуктуації. Як результат, у запропонованому процесі відновлення, який діє подібно процедур "диференціювання", алгоритм ці флуктуації підсилює та переносить на нижні ділянки, що: цілому спотворює результати вздовж всієї висотної шкали і визиває непередбачені похибки обчислень (лінія в). В основу корисної моделі, що пропонується, поставлено задачу по усуненню недоліків методу-прототипу. Радар HP все так же буде використовувати довгий зондувальний радіоімпульс, проте відновлення профілю потужності сигналу розсіяння можливе при використанні інформації навіть з його короткого відрізка. Це дозволить радару HP проводити розрахунки для тих висотних ділянок, де лінія висотного профілю має плавну форму, а це зазвичай діапазон, де відношення сигналу до шуму S/N має значення одиниця і більше. Для реалізації цього режиму система обробки після прийому даних використає нову процедуру, у якій при розрахунках складових відновлювальної потужності Ph буде приймати участь функція у вигляді поліному (n-1)-го степеня, призначена, щоб описати та використати взаємні висотні зв'язки між складовими Ph на вибраному відрізку профілю. Суть способу, який є об'єктом запропонованої корисної моделі, є такою. Радар HP Інституту іоносфери при іоносферних вимірюваннях на практиці використовує імпульс зондування з прямокутною обвідною, який відповідає висотному розрізненню порядку ~100 км. Ця величина дозволяє отримувати достатнє відношення сигнал/шум, проте, як недолік, співпадає з шириною шару в максимумі іонізації і цим загрублює результат. Щоб покращити точність у подальших розрахунках іоносферних параметрів, поставимо задачу покращення 2 UA 112018 U 5 10 15 20 висотного розрізнення, а це в значній мірі можна досягти вибором достатнього співвідношення між тривалістю T імпульсу зондування і кроком (кратністю) знімання t цифрових відліків з виходу радіоприймального пристрою, а також спеціальним алгоритмом обробки цих відліків. Розглянемо варіант, коли кратність спрацьовування АЦП у загальному випадку описується співвідношенням T nt . При такому співвідношенні імпульсний радар HP спочатку вибирає висотний інтервал h1; hi n1 , де відношення сигнал/шум більше одиниці і для якого по правилу (1) протягом сеансу у декілька хвилин статистично накопичує згладжений імпульсом відрізок профілю потужності сигналу розсіяння у вигляді відліків P h . В результаті інформація для цього відрізку буде описуватися системою із n рівнянь наступного вигляду: P (hi ) P(hi ) P(hi 1) P(hi 2 ) ... P(hi n 1), P (hi 1) P(hi 1) P(hi 2 ) P(hi 3 ) ... P(hi n ), , (2) P (hi 2 ) P(hi 2 ) P(hi 3 ) P(hi 4 ) ... P(hi n 1), P (hi n 1) P(hi n 1) P(hi n ) P(hi n 1) ... P(hi 2n 1), Рядки цієї системи показують, що у кожен отриманий на профілі відлік, відповідно до об'єму розсіяння, входять складові P(hk ) від висотних ділянок за номерами k i, i 1 ...,i 2n 1, і ці , складові, що відповідають кращому у n раз висотному розрізненню, нам потрібно розрахувати (відновити). Операцію відновлення система обробки радара після сеансу накопичення проводить за допомогою аналітичної функції, яка характеризується поліномом (n-1)-го степеня вигляду 2 3 P(hk ) a0 a1hk a2hk a3hk ... an1hn1 , (3) k та характеризує взаємний зв'язок вздовж висоти складових P(hk ) , з яких утворено P hi . Щоб знайти коефіцієнти цього поліному, необхідно його підставити на місце кожної складової у виразі (2). Наприклад, по відношенню до ділянки за номером і (перше рівняння) це дасть наступний результат: P (hi ) a0 a1hi a2hi2 a3hi3 a 4hi4 ... an 1hn 1 i a0 a1hi 1 a2hi2 1 a3hi3 1 a 4hi4 1 ... an 1hn 1 i 1 a0 a1hi 2 a 2hi2 2 a3hi3 2 a 4hi4 2 ... an 1hn 1 i 2 a0 a1hi n 1 a2hi2 n 1 a3hi3 n 1 a 4hi4 n 1 ... an 1hn 11. in Упорядкування цього виразу приводить до більш компактного запису, а саме: P (hi ) n a0 a1 c1,1 a2 c 2,1 a3 c 3,1 ... an1 cn1,1, 25 де c1,1 hi hi 1 hi 2 ... hi n 1, 2 2 2 2 c 2,1 hi hi 1 hi 2 ... hi n 1, 3 3 3 3 c 3,1 hi hi 1 hi 2 ... hi n 1, c n 1,1 hn 1 hn 1 hn 1 ... hn 11. i i 1 i 2 in Аналогічно отримуються подібні результати для всіх n залучених ділянок, і ця операція утворює систему загального вигляду 30 P (hi ) n a0 a1 c1,1 a2 c 2,1 ... an 1 c n 1,1, P (hi 1) n a0 a1 c1,2 a2 c 2,2 ... an 1 c n 1,2 , , (4) P (hi 2 ) n a0 a1 c1,3 a2 c 2,3 ... an 1 c n 1,3 , P (hi n 1) n a0 a1 c1,n a2 c 2,n ... an 1 c n 1,n , для якої відомі всі елементи при коефіцієнтах a0, a1,...,an1 , а саме: c1,1 hi hi 1 hi 2 ... hi n 1, 2 2 2 2 c 2,1 hi hi 1 hi 2 ... hi n 1, 3 3 3 3 c 3,1 hi hi 1 hi 2 ... hi n 1, c n 1,1 hn 1 hn 1 hn 1 ... hn 11, i i 1 i 2 in 3 UA 112018 U c1,2 hi 1 hi 2 hi 3 ... hi n , 2 2 2 2 c 2,2 hi 1 hi 2 hi 3 ... hi n , 3 3 3 3 c 3,2 hi 1 hi 2 hi 3 ... hi n , n 1 n 1 n 1 n 1 c n 1,2 hi 1 hi 2 hi 3 ... hi n , c1,n hi n 1 hi n hi n 1 ... hi 2n 1, 2 2 2 2 c 2,n hi n 1 hi n hi n 1 ... hi 2n 1, 3 3 3 3 c 3,n hi n 1 hi n hi n 1 ... hi 2n 1, (5) c n 1,n hn 11 hn 1 hn 11 ... hn 1 1. in in in i 2n 5 Таким чином, маємо n лінійних алгебраїчних рівнянь відносно невідомих коефіцієнтів a0 , a1,...,an1 . Залучаючи стандартні методи розв'язання подібних систем, на заключному етапі 10 15 20 25 30 35 40 45 розраховуються всі її коефіцієнти, а потім за допомогою поліному (3) обчислюється відновлювальний профіль P(h) на заданому відрізку висотної шкали. Відомості, які підтверджують можливість здійснення корисної моделі. Для підтвердження викладеної методики на Фіг. 2 наведено потужність сигналу розсіяння P(h) , яку отримано при комп'ютерному моделюванні профілю з використанням поліному для випадку n=6, тобто P(hi ) a0 a1hi a2hi2 a3hi3 a4hi4 a5hi5 . Цей поліном вздовж осі h розраховувався при підібраних коефіцієнтах, а саме: a0 10 , a1 0.1 , a2 0.2 , a3 0.05 , a4 0.02 , a5 0.00075 (лінія а). Відносно цього профілю, використовуючи ширину апертури 6, наступним кроком було запущено процес його ковзного згладжування (аналогія дії довгого зондувального імпульсу) за допомогою виразу P (hi ) P(hi ) P(hi1) P(hi2 ) P(hi3 ) P(hi 4 ) P(hi5 ) , і отримано профіль виду P h (нормована лінія б). Наступним кроком по відношенню до ділянок з номерами і=1,2,…,6 було запущено процедуру знаходження коефіцієнтів a0 , a1, ...,a5 шляхом розв'язання системи (2), що для цього випадку мала шість лінійних алгебраїчних рівнянь. В результаті її розв'язання були отримані ті ж самі значення коефіцієнтів, що й задавалися по умові. Цей факт підтверджує і співпадіння результатів відновленого профілю (точки в) з висхідним (а). В цілому ж дане моделювання говорить про дієздатність запропонованого методу відновлення профілю. Щоб підтвердити дієвість запропонованого методу по відношенню до реальних даних, на Фіг. 3 наведено результати його дії, але вже із залученням інформації про експериментальний профіль потужності P h сигналу розсіяння, отриманий за допомогою радара HP Інституту іоносфери 22.03.2016 р. (лінія б). Вдовж осі ординат на кресленні відображено ще й додаткову інформацію про відношення S/N сигнал/шум, при якому цю потужність отримано. Маючи довжину радіоімпульсу зондування, якому відповідає висотне розрізнення у 108 км, частота дискретизації сигналу в АЦП була вибрана таким чином, щоб відліки фіксувалися через 18 км, тобто виконувалася умова n=6. Для регулярної іоносфери використання у максимумі іонізації у цьому випадку поліному 5-го степеня цілком достатньо. Як можна спостерігати, результат дії запропонованого методу по відновленню форми профілю потужності сигналу розсіяння в діапазоні висот від 228 до 318 км позитивний (точки в). Тобто, коли радар HP буде використовувати довгий зондувальний радіоімпульс, а іоносфера буде досліджуватися на кінцевому інтервалі, наприклад в районі максимуму іонізації, запропонована модель демонструє можливість отримання при такій умові високого розрізнення, як і при укороченому імпульсі зондування. Це в подальшому забезпечить більш точне його нормування по точці максимуму та, відповідно, більш точні розрахунки при цьому концентрації електронів в іоносфері. Джерела інформації: 1. Котов Д.В. Оптимальное декодирование как способ увеличения высотного разрешения при измерениях профиля мощности HP сигнала / Д.В. Котов, В.А. Пуляев // Вестн. НТУ "ХПИ". Автоматика и приборостроение. - X.: НТУ "ХПИ", 2006. - № 31. - С. 77-83. 4 UA 112018 U 1. Слинько Д.А. Учет искажений, связанных с эффектом импульсного сглаживания сигнала некогерентного рассеяния / Д.А. Слинько, В.А. Пуляев // Вестн. НТУ "ХПИ". Радиофизика та ионосфера. - X.: НТУ "ХПИ", 2011. - № 44. - С. 73-76. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 Спосіб відновлення висотного профілю потужності сигналу некогерентного розсіяння в іоносферній плазмі, форма якого розраховується в процесі роботи імпульсного радара некогерентного розсіяння у випадку, коли у системі обробки радара по відношенню до протяжності зондувального імпульсу T , що рухається вздовж променя, задана кратність періоду t дискретизації зворотного сигналу розсіяння як T nt , при цьому у системі обробки протягом сеансу (декілька хвилин) статистично накопичуються та звільняються від адитивних шумів на кожній і-й висотній ділянці відліки P hi , що із-за використання довгого зондувального радіоімпульсу утворюють згладжений вздовж висоти h профіль, причому у кожний відлік цього профілю, відповідно до імпульсного об'єму розсіяння та згідно із законом P hi i n 1 Ph , (1) k k i 20 входить ряд складових відновлювального профілю потужності Phk від ділянок за номерами k i, i 1 ...,i n 1, , який відрізняється тим, що відліки P h сигналу розсіяння система обробки радара після сеансу накопичення спочатку сортує шляхом вибору такого діапазону висот, де відношення сигнал/шум більше одиниці та для якого, згідно із законом (1), має місце система у вигляді n рівнянь, а саме P (hi ) P(hi ) P(hi 1) P(hi 2 ) ... P(hi n 1), P (hi 1) P(hi 1) P(hi 2 ) P(hi 3 ) ... P(hi n ), , (2) P (hi 2 ) P(hi 2 ) P(hi 3 ) P(hi 4 ) ... P(hi n 1), P (hi n 1) P(hi n 1) P(hi n ) P(hi n 1) ... P(hi 2n 1), складові Phk сигналу розсіяння з висотних ділянок за номерами k i, i 1 ...,i 2n 1, , а потім система обробки радара з метою покращення у n раз висотного розрізнення розраховує ці складові шляхом рішення аналітичної функції у вигляді полінома (n-1)-го степеня вигляду 2 3 P(hk ) a0 a1hk a2hk a3hk ... an1hn1 , (3) k у 25 30 які входять який описує взаємні висотні зв'язки між складовими та для якого коефіцієнти a0 , a1,..,an1 знаходяться за допомогою стандартних методів розв'язання системи із n лінійних алгебраїчних рівнянь вигляду P (hi ) n a0 a1 c1,1 a2 c 2,1 ... an 1 c n 1,1, P (hi 1) n a0 a1 c1,2 a2 c 2,2 ... an 1 c n 1,2 , P (hi 2 ) n a0 a1 c1,3 a2 c 2,3 ... an 1 c n 1,3 , P (hi n 1) n a0 a1 c1,n a2 c 2,n ... an 1 c n 1,n , , (4) отриманої в результаті послідовної підстановки поліному (3) на місце кожної складової у рівнянні системи (2), і для якої є відомими всі елементи при коефіцієнтах, а саме 35 c1,1 hi hi 1 hi 2 ... hi n 1, 2 2 2 2 c 2,1 hi hi 1 hi 2 ... hi n 1, 3 3 3 3 c 3,1 hi hi 1 hi 2 ... hi n 1, c n 1,1 hn 1 hn 1 hn 1 ... hn 11, i i 1 i 2 in 5 UA 112018 U c1,2 hi 1 hi 2 hi 3 ... hi n , 2 2 2 2 c 2,2 hi 1 hi 2 hi 3 ... hi n , 3 3 3 3 c 3,2 hi 1 hi 2 hi 3 ... hi n , c n 1,2 hn 1 hn 1 hn 1 ... hn 1, i 1 i 2 i3 in c 1,n hi n 1 hi n hi n 1 ... hi 2n 1, 2 2 2 2 c 2,n hi n 1 hi n hi n 1 ... hi 2n 1, 3 3 3 3 c 3,n hi n 1 hi n hi n 1 ... hi 2n 1, (5). c n 1,n hn 11 hn 1 hn 11 ... hn 1 1 in in in i 2n 6 UA 112018 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01S 13/00
Мітки: сигналу, спосіб, відновлення, потужності, некогерентного, розсіяння, профілю, висотного
Код посилання
<a href="https://ua.patents.su/9-112018-sposib-vidnovlennya-visotnogo-profilyu-potuzhnosti-signalu-nekogerentnogo-rozsiyannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб відновлення висотного профілю потужності сигналу некогерентного розсіяння</a>
Спосіб імітації висотного розподілу сигналу некогерентного розсіяння та завади
Номер патенту: 45547
Опубліковано: 10.11.2009
Автор: Богомаз Олександр Вікторович
МПК: G01S 13/95
Мітки: сигналу, некогерентного, спосіб, розсіяння, висотного, завади, розподілу, імітації
Формула / Реферат:
Спосіб імітації висотного розподілу сигналу некогерентного розсіяння та завади, що полягає у формуванні суміші шумоподібного сигналу та завади із заданими спектрами шляхом складання гармонічних сигналів з випадковими початковими фазами за виразом,де N та М - кількість гармонік, якими представлено сигнал та заваду, Aiсигн та Ajзав - значення спектральних...
Спосіб імітації сигналу некогерентного розсіяння відповідно до стану та динаміки іоносферної плазми
Номер патенту: 58665
Опубліковано: 26.04.2011
Автори: Пуляєв Валерій Олександрович, Ємельянов Леонід Якович, Козлов Сергій Сергійович, Богомаз Олександр Вікторович, Мірошніков Артем Євгенійович
МПК: G01S 13/00
Мітки: спосіб, іоносферної, некогерентного, імітації, розсіяння, стану, плазми, відповідно, динаміки, сигналу
Формула / Реферат:
Спосіб імітації сигналу некогерентного розсіяння відповідно до стану та динаміки іоносферної плазми, який полягає у формуванні спектральної густини шляхом складання гармонічних сигналів з випадковими початковими фазами за виразомде
Автомобільний підсилювач потужності звукового сигналу
Номер патенту: 62195
Опубліковано: 10.08.2011
Автори: Камбуров Артем Дмитрович, Тарадін Віталій Євгенович, Ткаленко Андрій Олександрович, Голубєв Олександр Анатолійович, Алексєєв Олег Вадимович, Бабарикін Олексій Валентинович
МПК: B60R 25/00, B60R 99/00
Мітки: потужності, звукового, сигналу, автомобільний, підсилювач
Формула / Реферат:
Автомобільний підсилювач потужності звукового сигналу, що містить підсилювач потужності, з'єднаний з передпідсилювачем, який відрізняється тим, що в нього додатково введено RF-приймач, який сполучений з передпідсилювачем і виконаний з можливістю приймання сигналів від мультимедійного головного пристрою у вигляді пакетних даних по радіочастотному каналу.
Спосіб відновлення профілю зношеного гребеня колеса рейкового транспорту
Номер патенту: 46677
Опубліковано: 15.05.2002
Автор: Матвєєв Володимир Валентинович
Мітки: спосіб, зношеного, колеса, профілю, рейкового, відновлення, гребеня, транспорту
Формула / Реферат:
Спосіб відновлення профілю зношеного гребеня колеса рейкового транспорту, що включає нарощування нагрітої до заданої температури зношеної поверхні гребеня колеса шляхом наплавлення на неї металу і видалення металу з всієї поверхні кочення колеса до одержання заданого розміру профілю кочення, який відрізняється тим, що перед наплавленням металу на зношену поверхню гребеня колеса видаляють метал з поверхні кочення обода колеса до основи гребеня...
Спосіб відновлення профілю поверхонь кочення коліс залізничного рухомого складу
Номер патенту: 33471
Опубліковано: 25.06.2008
Автори: Голубенко Олександр Леонідович, Діденко Дмитро Михайлович, Ткач Ірина Геннадіївна, Сапронова Світлана Юріївна, Компанієць Іван Семенович, Ткаченко Віктор Петрович
МПК: B61B 12/00
Мітки: спосіб, залізничного, рухомого, поверхонь, кочення, складу, коліс, профілю, відновлення
Формула / Реферат:
Спосіб відновлення профілю поверхонь кочення коліс залізничного рухомого складу, при якому при досягненні параметром крутизни гребеня гранично допустимого значення виконують обточку профілю колеса з доведенням значення параметра крутизни до номінального, який відрізняється тим, що обточку поверхні кочення виконують тільки для гребеневої частини профілю, відновлюючи його шляхом корекції таким чином, щоб від точки на поверхні гребеня, яка є...
Попередній патент: Сировинна суміш для одержання смарагду
Наступний патент: Ківшовий елеватор
Випадковий патент: П'єзоелектричний перетворювач механічних величин