Безкупольний парашут
Номер патенту: 2166
Опубліковано: 26.12.1994
Автори: Тисячна Вікторія Володимирівна, Михалочкин Микола Андрійович, Бєлік Володимир Іванович
Формула / Реферат
1. Бескупольный парашют, содержащий вращающиеся лопасти и систему подвески, отличающийся тем, что он снабжен торцевым электрогенератором, доводочным вентилятором и радиоуправлением.
2. Бескупольный парашют по п.1, отличающийся тем, что для обеспечения электроэнергией используется тарельчатый торцевой электрогенератор, ротор которого вмонтирован в основание вращающихся лопастей.
3. Бескупольный парашют по п.2, отличающийся тем, что тарельчатый торцевой ротор снабжен системой возбуждения, состоящей из постоянных магнитов, закрепленных в пазах ласточкиным хвостом по окружности вращающегося торцевого ротора.
4. Бескупольный парашют по п.2, отличающийся тем, что силовая обмотка торцевого статора закреплена в пазах по окружности основания неподвижного статора.
5. Бескупольный парашют по п.1, отличающийся тем, что доводочный вентилятор закреплен на верхней части торцевого статора.
6. Бескупольный парашют по п.1, отличающийся тем, что для управления доводочным вентилятором он снабжен автоматическим радиоуправляемым устройством.
7. Бескупольный парашют по п. 1, отличающийся тем, что он снабжен устройством для подачи световых импульсных сигналов в точку опускания груза.
8. Бескупольный парашют по п.1, отличающийся тем, что он снабжен устройством для подачи звуковых прерывных сигналов в точку опускания груза в виде электросирены стандартного типа.
Текст
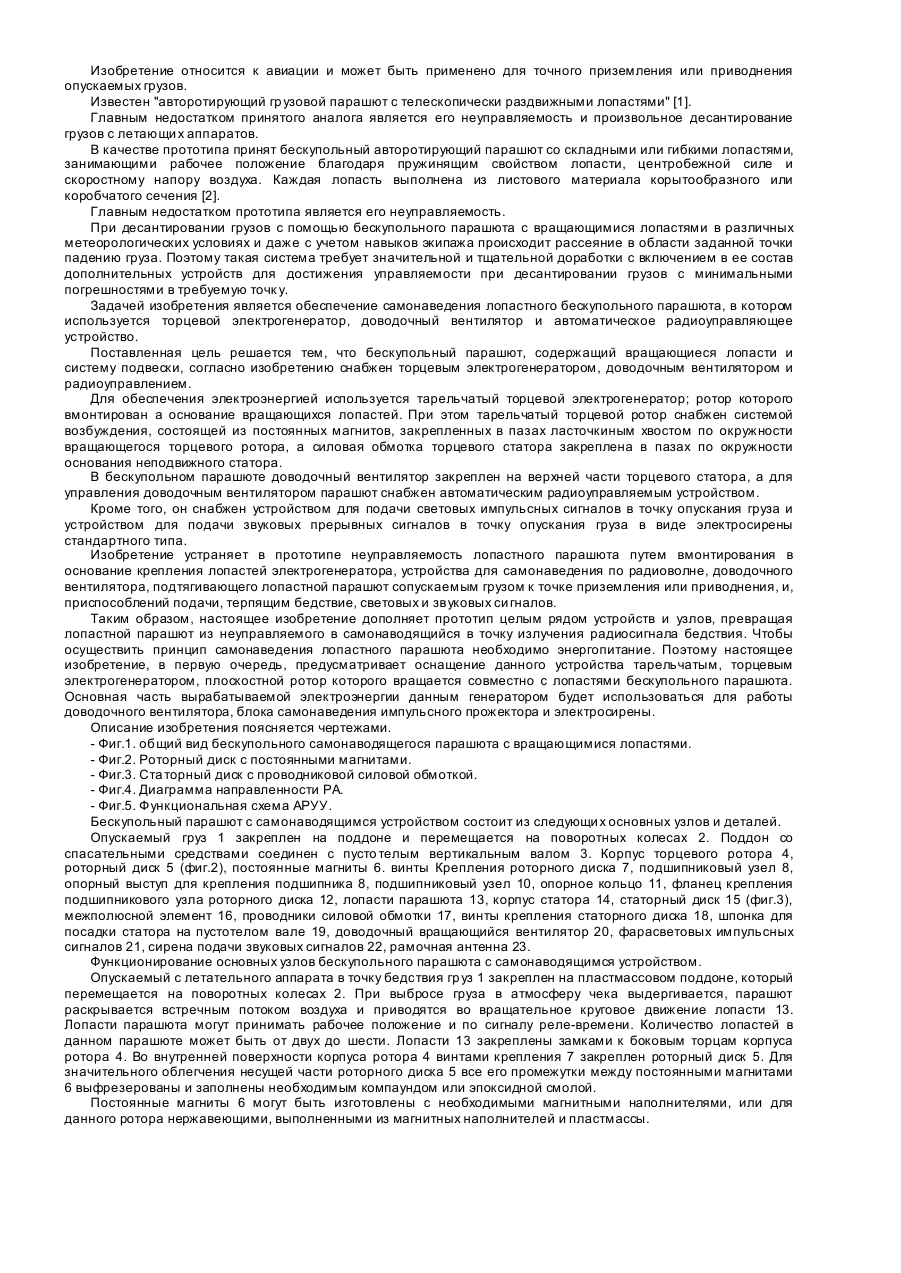
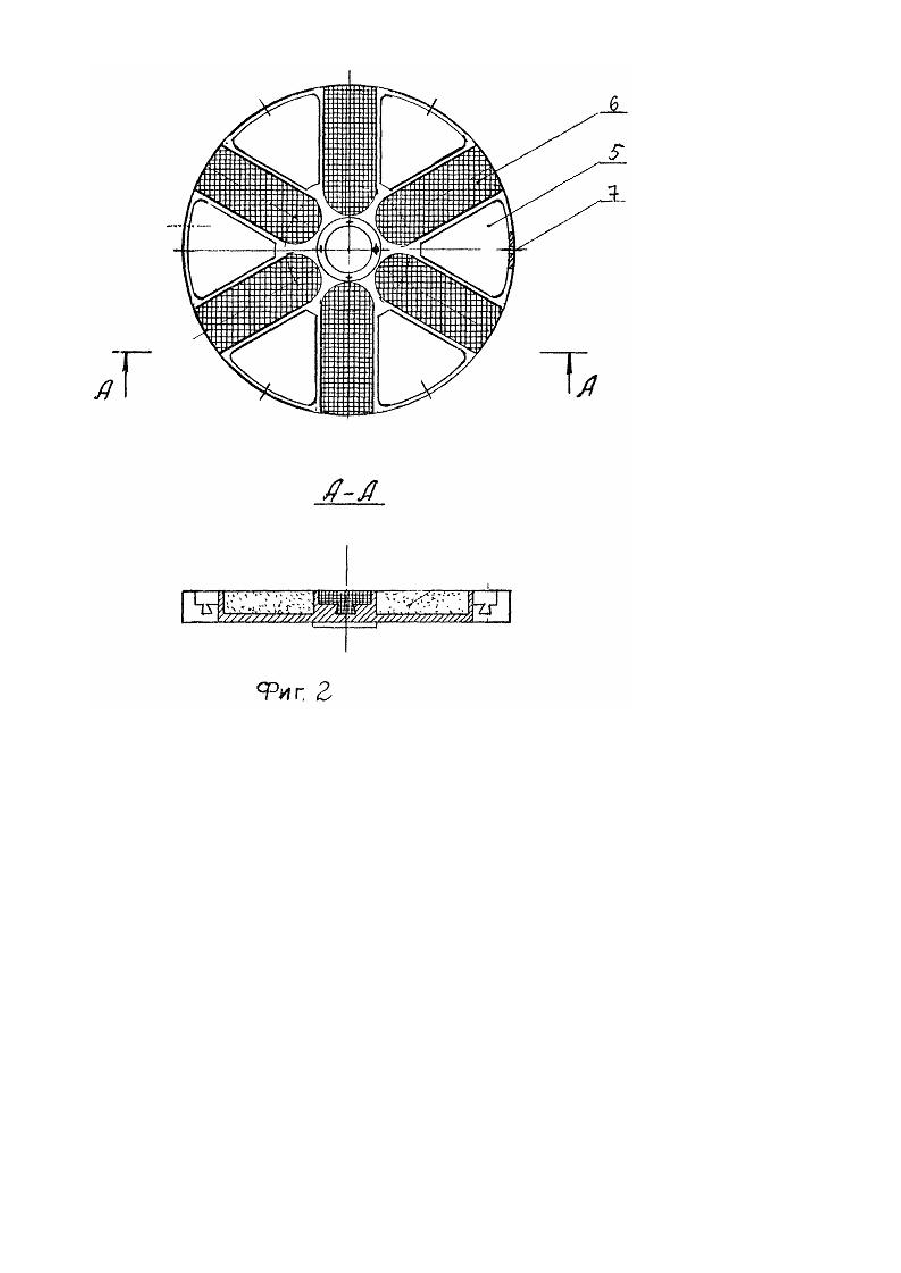
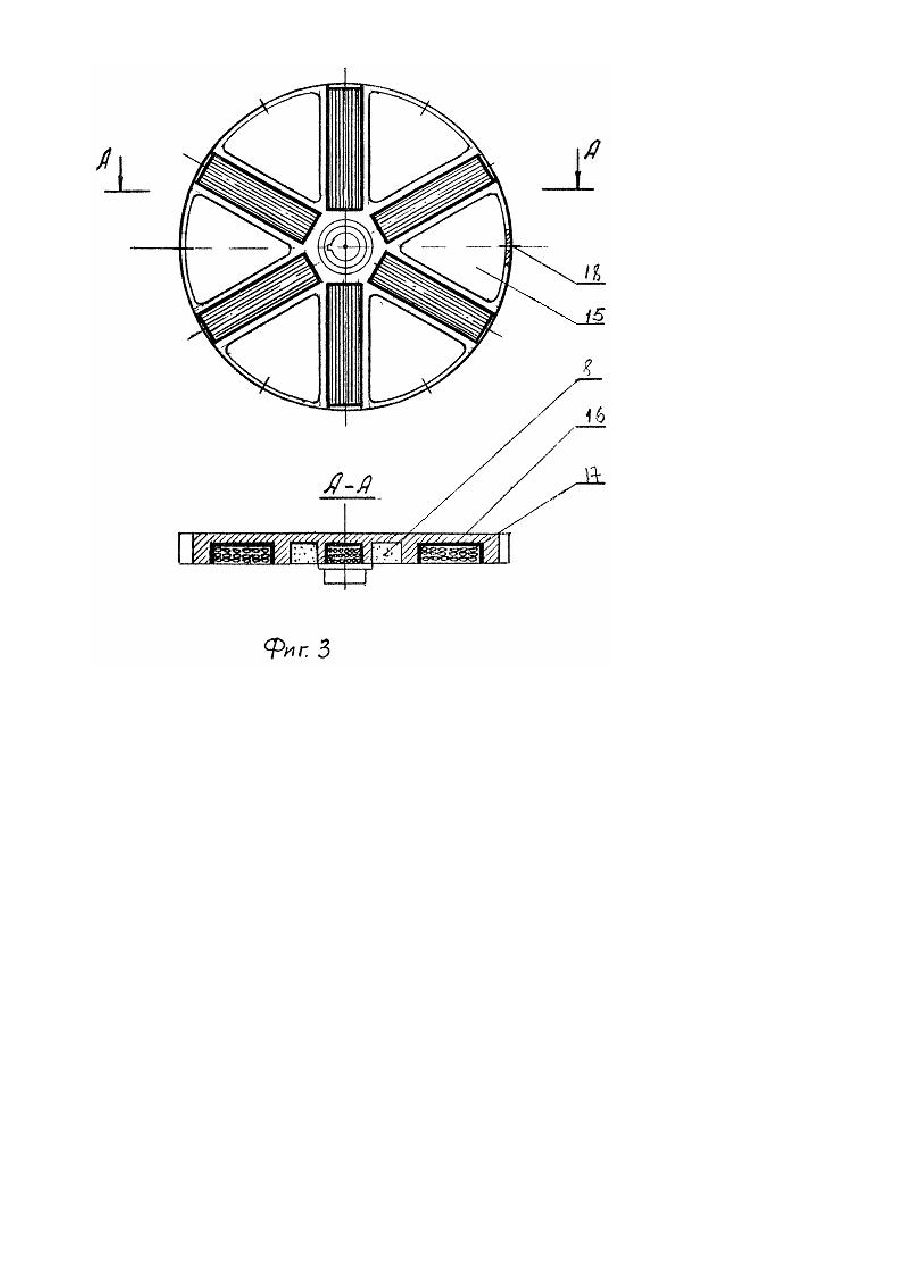
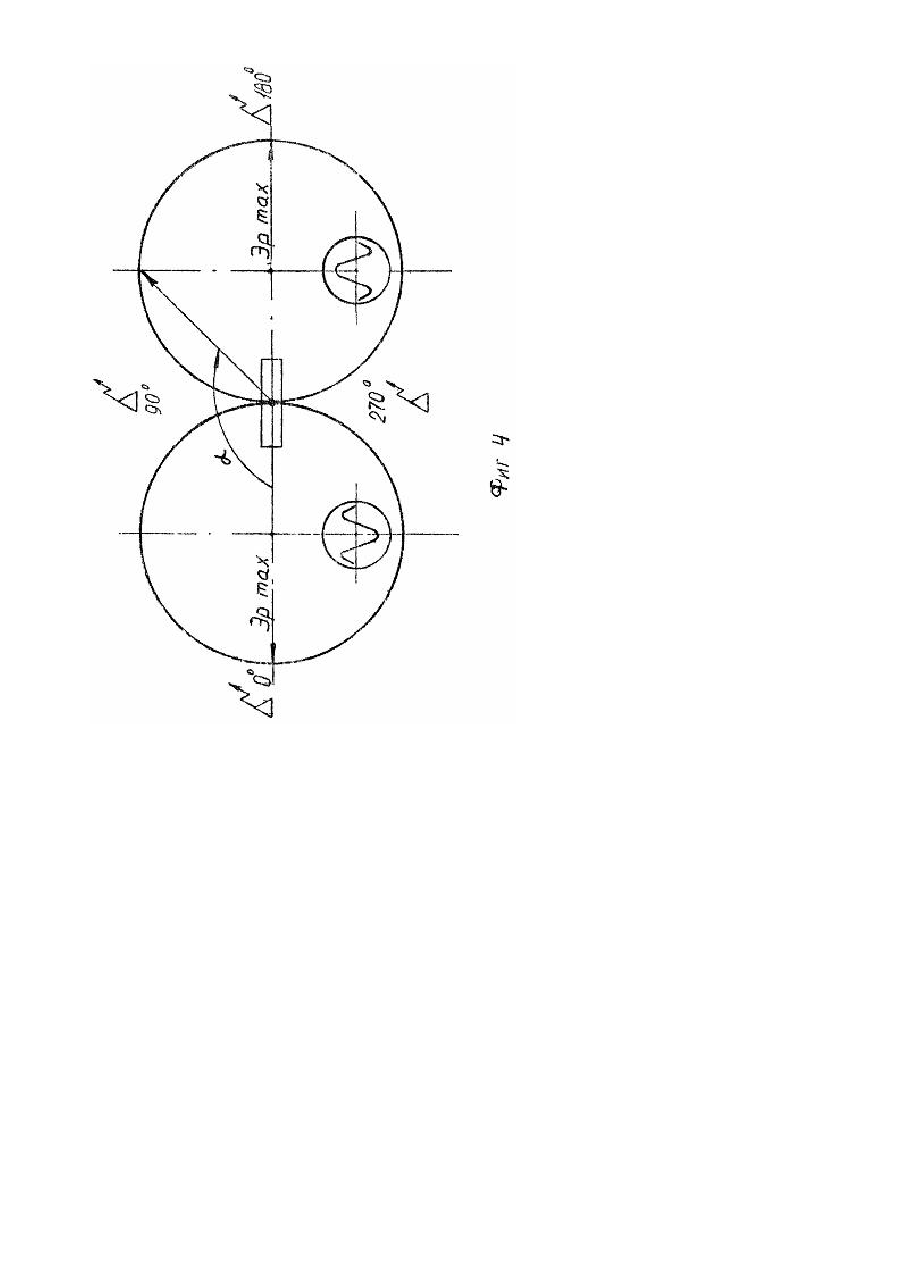
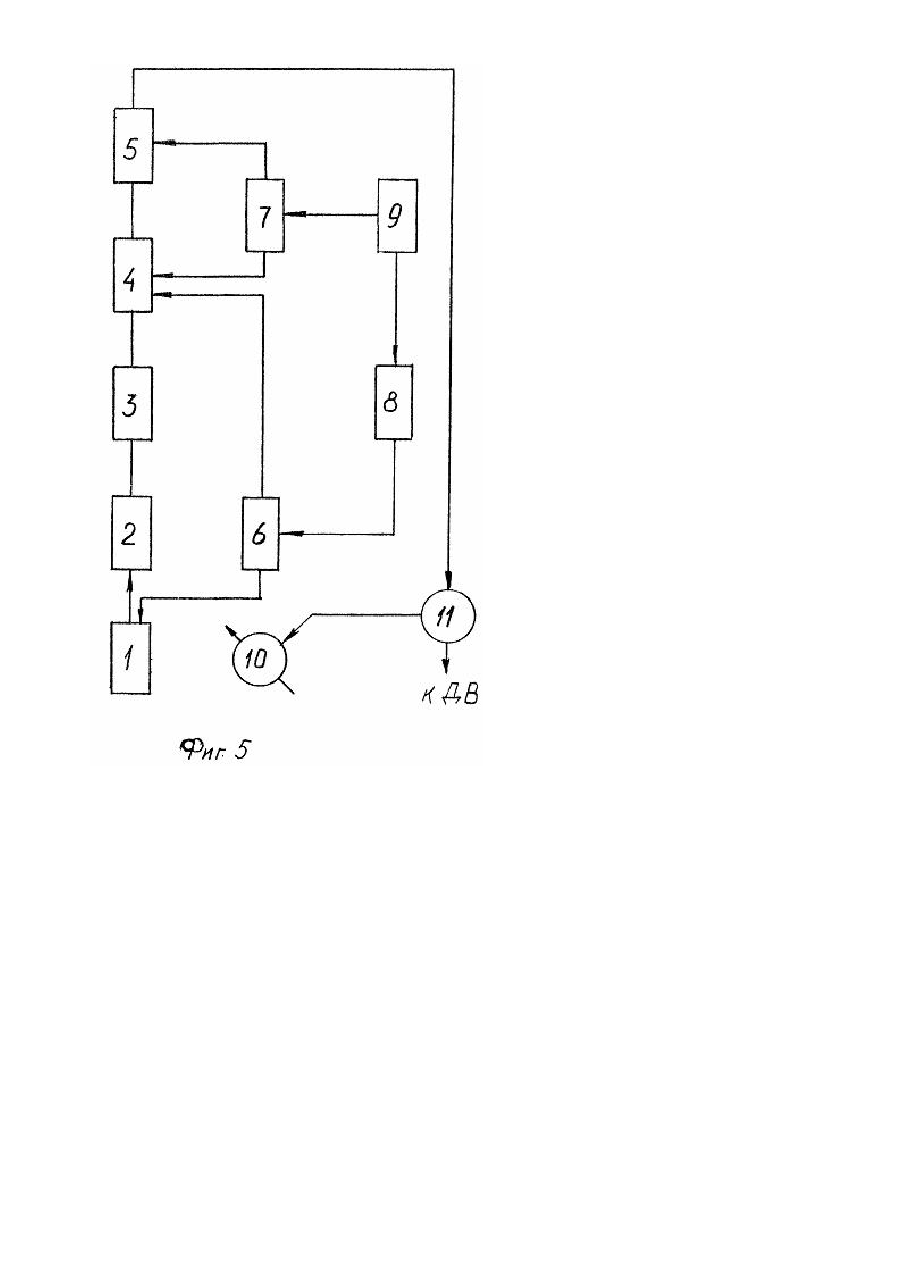
Изобретение относится к авиации и может быть применено для точного приземления или приводнения опускаемых грузов. Известен "авторотирующий гр узовой парашют с телескопически раздвижными лопастями" [1]. Главным недостатком принятого аналога является его неуправляемость и произвольное десантирование грузов с летающи х аппаратов. В качестве прототипа принят бескупольный авторотирующий парашют со складными или гибкими лопастями, занимающими рабочее положение благодаря пружинящим свойством лопасти, центробежной силе и скоростному напору воздуха. Каждая лопасть выполнена из листового материала корытообразного или коробчатого сечения [2]. Главным недостатком прототипа является его неуправляемость. При десантировании грузов с помощью бескупольного парашюта с вращающимися лопастями в различных метеорологических условиях и даже с учетом навыков экипажа происходит рассеяние в области заданной точки падению груза. Поэтому такая система требует значительной и тщательной доработки с включением в ее состав дополнительных устройств для достижения управляемости при десантировании грузов с минимальными погрешностями в требуемую точк у. Задачей изобретения является обеспечение самонаведения лопастного бескупольного парашюта, в котором используется торцевой электрогенератор, доводочный вентилятор и автоматическое радиоуправляющее устройство. Поставленная цель решается тем, что бескупольный парашют, содержащий вращающиеся лопасти и систему подвески, согласно изобретению снабжен торцевым электрогенератором, доводочным вентилятором и радиоуправлением. Для обеспечения электроэнергией используется тарельчатый торцевой электрогенератор; ротор которого вмонтирован а основание вращающихся лопастей. При этом тарельчатый торцевой ротор снабжен системой возбуждения, состоящей из постоянных магнитов, закрепленных в пазах ласточкиным хвостом по окружности вращающегося торцевого ротора, а силовая обмотка торцевого статора закреплена в пазах по окружности основания неподвижного статора. В бескупольном парашюте доводочный вентилятор закреплен на верхней части торцевого статора, а для управления доводочным вентилятором парашют снабжен автоматическим радиоуправляемым устройством. Кроме того, он снабжен устройством для подачи световых импульсных сигналов в точку опускания груза и устройством для подачи звуковых прерывных сигналов в точку опускания груза в виде электросирены стандартного типа. Изобретение устраняет в прототипе неуправляемость лопастного парашюта путем вмонтирования в основание крепления лопастей электрогенератора, устройства для самонаведения по радиоволне, доводочного вентилятора, подтягивающего лопастной парашют сопускаемым грузом к точке приземления или приводнения, и, приспособлений подачи, терпящим бедствие, световых и звуковых си гналов. Таким образом, настоящее изобретение дополняет прототип целым рядом устройств и узлов, превращая лопастной парашют из неуправляемого в самонаводящийся в точку излучения радиосигнала бедствия. Чтобы осуществить принцип самонаведения лопастного парашюта необходимо энергопитание. Поэтому настоящее изобретение, в первую очередь, предусматривает оснащение данного устройства тарельчатым, торцевым электрогенератором, плоскостной ротор которого вращается совместно с лопастями бескупольного парашюта. Основная часть вырабатываемой электроэнергии данным генератором будет использоваться для работы доводочного вентилятора, блока самонаведения импульсного прожектора и электросирены. Описание изобретения поясняется чертежами. - Фиг.1. общий вид бескупольного самонаводящегося парашюта с вращающимися лопастями. - Фиг.2. Роторный диск с постоянными магнитами. - Фиг.3. Ста торный диск с проводниковой силовой обмоткой. - Фиг.4. Диаграмма направленности РА. - Фиг.5. Функциональная схема АРУУ. Бескупольный парашют с самонаводящимся устройством состоит из следующи х основных узлов и деталей. Опускаемый груз 1 закреплен на поддоне и перемещается на поворотных колесах 2. Поддон со спасательными средствами соединен с пусто телым вертикальным валом 3. Корпус торцевого ротора 4, роторный диск 5 (фиг.2), постоянные магниты 6. винты Крепления роторного диска 7, подшипниковый узел 8, опорный выступ для крепления подшипника 8, подшипниковый узел 10, опорное кольцо 11, фланец крепления подшипникового узла роторного диска 12, лопасти парашюта 13, корпус статора 14, статорный диск 15 (фиг.3), межполюсной элемент 16, проводники силовой обмотки 17, винты крепления статорного диска 18, шпонка для посадки статора на пустотелом вале 19, доводочный вращающийся вентилятор 20, фарасветовых импульсных сигналов 21, сирена подачи звуковых сигналов 22, рамочная антенна 23. Функционирование основных узлов бескупольного парашюта с самонаводящимся устройством. Опускаемый с летательного аппарата в точку бедствия гр уз 1 закреплен на пластмассовом поддоне, который перемещается на поворотных колесах 2. При выбросе груза в атмосферу чека выдергивается, парашют раскрывается встречным потоком воздуха и приводятся во вращательное круговое движение лопасти 13. Лопасти парашюта могут принимать рабочее положение и по сигналу реле-времени. Количество лопастей в данном парашюте может быть от двух до шести. Лопасти 13 закреплены замками к боковым торцам корпуса ротора 4. Во внутренней поверхности корпуса ротора 4 винтами крепления 7 закреплен роторный диск 5. Для значительного облегчения несущей части роторного диска 5 все его промежутки между постоянными магнитами 6 выфрезерованы и заполнены необходимым компаундом или эпоксидной смолой. Постоянные магниты 6 могут быть изготовлены с необходимыми магнитными наполнителями, или для данного ротора нержавеющими, выполненными из магнитных наполнителей и пластмассы. Постоянные магниты 6 закрепляются ласточкиным хвостом по окружности роторного диска 5. Все элементы роторного диска закреплены и залиты компаундом в горизонтальной плоскости и поверхность прошлифована на станке. Корпус ротора 4 с роторным диском 5 совместно с парными лопастями 13 вращается под напором встречного потока воздуха в двух подшипниковых узлах 8 и 10 вокруг п усто телого вала 3. Корпус статора 14 закреплен при помощи шпонки 19 на наружной поверхности пустотелого вала 3. Все промежутки между пакетами силовой обмотки 17 статорного диска 15 (фиг.3) вы фрезерованы и заполнены необходимым компаундом. Проводники силовой обмотки 17 уложены в межполюсный элемент 16. изготовленный из необходимой марки электротехнической стали и загерметизированы водонепроницаемым слоем пластмассового материала. Силовая обмотка на небольшой промежуток своей работы охлаждается встречным воздушным потоком. Магнитные оси всех постоянных магнитов 6 торцевого ротора 4 ориентированы в одном кольцевом направлении. Таким образом, если под давлением воздушного потока лопасти парашюта 13 вместе с торцевым ротором 4 и постоянными магнитами 6 привести в круговое движение, то направление магнитного потока в каждом полюсном элементе изменяется, так как полюс каждого магнита проходит через полюсной элемент с силовыми проводниками, что приводит к индукции переменного электрического тока в проводниках обмотки 17. В зависимости от места и условий использования лопастного самонаводящегося парашюта его основные узлы и детали должны быть изготовлены из пластмассы, армированного стекла повышенной прочности, алюминия с необходимым покрытием из стали морского стандарта. Вырабатываемый электрогенератором переменный электрический ток через выпрямитель поступает для питания радиоустройства 23, доводочного вентилятора 20, фары световых импульсных сигналов 21 и сирены подачи звуковых сигналов 22. Предлагаемая конструкция впервые использует известный принцип перемещения в атмосфере лопастного самонаводящегося парашюта, аналогично полету вертолета. Это вертикальный плавный спуск и при необходимости подтягивание доводочным вентилятором 20 лопастного парашюта с опускаемым грузом в точку, откуда исходит радиосигнал бедствия. Оказание помощи людям, терпящим бедствие на воде, представляет собой трудную и сложную проблему. Холодная и соленая морская вода, мокрая одежда быстро расходуют запас энергии человека и терпящие бедствие люди не в состоянии наблюдать за небом, ожидая спасательных средств. В сильный туман, дождь, снег или ночную темноту такое наблюдение вообще затруднено и опускаемый на парашюте груз может приводниться на достаточно близком расстоянии и человек, находясь в стрессовом состоянии, не сможет воспользоваться им. Поэтому бескупольные парашюты с самонаведением, которые используются для спасения людей, оснащаются световой и звуковой сигнализацией, в остальных вышеперечисленных ситуациях такая сигнализация используется при необходимости. Осветительная фара 21, опускаемая с грузом 1, должна освещать площадь водной поверхности, куда опускается лопастной самонаводящийся парашют. Подача электроэнергии на лампу импульсной вспышки осуществляется от электрогенератора через выпрямитель. Терпящие бедствие люди, которые не смогли заметить опускаемого груза со световым прожектором, могут услыша ть сирену подачи звукового сигнала 22, которая устанавливается дополнительно. Конструкция "Бескупольного парашюта" предусматривает соединение и разворот доводочного вентилятора 20 от радиоустройства 23 следующим образом. В верхней части радиоустройства 23 закреплен малогабаритный электродвигатель с червячным редуктором, который имеет соединение с другими узлами через червячную пару шестерен. Одна из шестерен закреплена на выступающей части валика редуктора, вторая закреплена на вертикальной тяге, расположенной во внутренней полости пустотелого вертикального вала 3. (Возможен и вариант прямого сочленения валика редуктора с вертикальной тягой без шестерен). Доводочный вентилятор 20 разворачивается вокруг своей оси о подшипнике и жестко в своей нижней центральной части соединен за выступающую часть тяги, вы ходящей из полости пустотелого вертикального вала 3. Таким образом, конструкция исполнительного механизма имеет жесткую связь: малогабаритный электродвйгатель - редуктор - шестерни - вертикальная тяга - доводочный вентилятор. Исполнительный механизм ориентирует доводочный вентилятор 20 следующим образом. При раскрытии парашюта, лопасти приходят в круговое вращение вместе с ротором электрогенератора, в обмотке статора появляется ЭДС. Электрический ток в первую очередь поступает на питание радиоустройства 23. Находясь в режиме поиска, рамочная антенна (РА) приходит в круго вое вращение, отыскивая источник излучений радиосигнала бедствия. С обнаружением сигнала бедствия и отработкой направления на источник излучения включается электродвигатель исполнительного механизма, обеспечивающий управление доводочным вентилятором. Как отмечалось выше, электропривод радиоустройства 23 имеет жесткое соединение с доводочным вентилятором. Доводочный вентилятор синхронно с рамочной антенной меняет угол своего кругового вращения на соответствующее количество градусов. При незначительном повороте рамочной антенны одновременно на такую же величину происходит разворот доводочного вентилятора. В момент, когда рамочная антенна строго сориентирована на источник излучения сигнала бедствия, в том же направлении фиксируется положение доводочного вентилятора, обеспечивающего подтягивание лопастного парашюта в требуемую точку посадки, Таким образом, рамочная антенна (РА) постоянно ориентирует доводочный вентилятор в направлении на источник сигнала бедствия. Высокая чувстви тельность радиоустройства и наличие жесткой связи электропривода радиоустройства 23 с доводочным вентилятором 20 позволяет осуществлять постоянную и стабильную коррекцию в горизонтальной плоскости опускаемого груза. С этой целью по-новому назначению предлагается использовать действующий, проверенный и широко эксплуатируемый на современных самолетах и вертолетах "автоматический радиокомпас (АРК): АРК-УД - для привода их на радиомаяки непрерывного и импульсного излучения с целью осуществления поиска и обнаружения самолетов, вертолетов и и х экипажей, снабженных ультракоротковолновыми (У) и дециметраволновыми (Д) радиомаяками" (6). Указанный АРК впервые используется в качестве автоматического радиоуправляемого устройства (АРУУ) для коррекции доводочного вентилятора, входящего в систему блоков лопастного бескупольного парашюта. АРУУ позволяет в автоматическом режиме работы осуществлять коррекцию опускаемых грузов в точку радиосигнала бедствия. Для реализации принципа самонаведения важным элементом самонаводящегося лопастного парашюта является автоматический радиопеленгатор, обеспечивающий прием радиосигнала бедствия, определение направления на источник радиоизлучений и управление лопастным парашютом. В качестве источника излучений, как уже отмечалось выше, могут быть использованы специальные часы типа "Докса" или отечественные аварийные радиостанции индивидуального и группового назначения, работающие в известном УКВ(У) и ДЦВ(Д) диапазонах радиоволн. Для пеленгации последних могут быть использованы автоматические радиоустройства, работающие по принципу автоматических радиокомпасов (АРК) соответствующих У и Д диапазонов радиоволн. АРК предназначен для обеспечения полета на источник излучения по сигналу, пропорциональному курсовому углу источника излучений. Принцип действия АРК основан на использовании свойств направленной рамочной антенны (РА). Рамочная антенна является чувствительным элементом АРК. Ее э.д.с - управляющий сигнал АРК. Фаза этого сигнала зависит от направления на источник излучения. В автоматическом радиоустройстве управления (АРУУ) может быть использована обычная рамка из ферритового сердечника прямоугольной формы, на которой уложена обмотка. На лопастном парашюте ее можно расположить под днищем опускаемого груза или сверху на статоре тарельчатого генератора. Как известно, диаграмма направленности PA n горизонтальной плоскости имеет вид (фиг.4). Она имеет форму восьмерки. При приеме радиосигнала из двух направлений, перпендикулярных к плоскости витков o o (a = 90 или 270 ), э.д.с рамки равна 0. При приеме сигналов из направлений, совпадающих с плоскостью витков РА (a = 0 o или 180o ), э.д.с максимальна (Э.д.с.mах). В момент, когда РА при вращении проходит через положение нулевого приема, фаза ее э.д.с изменяется на 180°. В АРУУ кроме РА должна быть установлена ненаправленная антенна (НА). Амплитуда и фаза ее э.д.с. не зависит от направления на источник излучения. Эти э.д.с. используют в качестве опорного сигнала. У РА и НА э.д.с. сдвинуты по фазе на 90°. Радиосигнал PA d предлагаемом устройстве будет использован для управления работой доводочного вентилятора лопастного бескупольного парашюта. Принцип действия АРУУ и функциональная схема. Автоматическое радиоустройство управления представляет собой АРК, УКВ и ДЦВ диапазонов, приемное устройство которого содержит канал привода. Канал обеспечивает прием сигналов в УКВ и ДЦВ диапазонов аварийных радиостанций. Блок-схема устройства изображена на (фиг.5). Аппаратура работает по сигналам маяков (аварийных радиостанций) и источников непрерывного излучения в широкой и узкой полосе и по сигналам импульсных маяков в широкой полосе. Излучаемый радиостанцией сигнал принимается антенной антенного блока 1. Диаграмма направленности антенны имеет форму, близкую к кардиоиде, благодаря применению РА и НА и суммированию их диаграмм направленности. Коммутация диаграмм направленности производится с частотой 30 Гц. Напряжение частоты 30 Гц генерируется местным генератором блока пеленгатора 5. При наличии сигнала пеленгуемой радиостанции и при расположении антенны в направлении, отличном от направления пеленга, сигнал, наведенный в антенне, промодулируется частотой коммутации 30 Гц, причем глубина модуляции тем больше, чем больше антенна отклонилась от положения нулевого приема. Этот сигнал используется для формирования управляющего, напряжения на двигатель доводочного вентилятора. Когда антенна находится в положении нулевого приема (положение пеленга), глубина модуляции равна нулю и лопастной бескупольный парашют снижается по траектории в точку, откуда излучается сигнал бедствия. Промодулированный сигнал рассогласования передается на антенный усилитель 2, усиливается и через коммутационную коробку 3 поступает на вход приемника 4. В приемнике 4 сигнал преобразуется, усиливается и детектируется. С выхода приемника 4 низкочастотная огибающая сигнала рассогласования подается на блок пеленгатора, где происходит ее усиление, сравнение по фазе с фазой местного звукового генератора 30 Гц и преобразование в управляющее напряжение, подаваемое на двигатель 4 доводочного вентилятора (ДВ). Иными словами - антенна, оказавшись при настройке на станцию не в положении пеленга, приводит во вращение двигатель доводочного вентилятора бескупольного лопастного парашюта, разворачивая его так, уменьшая значение курсового угла радиостанции. В положении пеленга, или кур=0 напряжение частоты местной модуляции на выходе приемника 4 отсутствует, а следовательно, прекращается подача управляющего напряжения на двигатель 11. При этом двигатель перестает вращаться и антенна 1 окажется в положении пеленга. Вращение двигателя 11 через редуктор передается датчику синхронной системы передачи кур на индикатор курса 10. В АРУУ предусмотрена возможность проверки его работоспособности с помощью генератора встроенного контроля 8. При этом с генератора встроенного контроля 8 через распределительную коробку 6 сигнал, соответствующий проверяемому режиму, поступает на встроенную в антенном блоке 1 измерительную линию и на вход канала обнаружения приемника 4. Управление работой радиокомпаса осуществляется с пульта управления 9, с которого производится переподключение рабочих поддиапазонов, выбор канала связи, переключение аппаратурой через раму соединительную 7 при контроле работоспособности.
ДивитисяДодаткова інформація
Назва патенту англійськоюCanopyless parachute
Автори англійськоюBelik Volodymyr Ivanovych, Mykhalochkyn Mykola Andriiovych, Tysiachna Vікtоrііа Volodymyrivna
Назва патенту російськоюБескупольный парашют
Автори російськоюБелик Владимир Иванович, Михалочкин Николай Андреевич, Тысячная Виктория Владимировна
МПК / Мітки
МПК: B64D 19/00
Мітки: безкупольний, парашут
Код посилання
<a href="https://ua.patents.su/8-2166-bezkupolnijj-parashut.html" target="_blank" rel="follow" title="База патентів України">Безкупольний парашут</a>
Спосіб управління планеруючим парашутом
Номер патенту: 2607
Опубліковано: 26.12.1994
Автор: Узунян Ваган Васкановіч
МПК: B64D 17/00
Мітки: планеруючим, парашутом, спосіб, управління
Формула / Реферат:
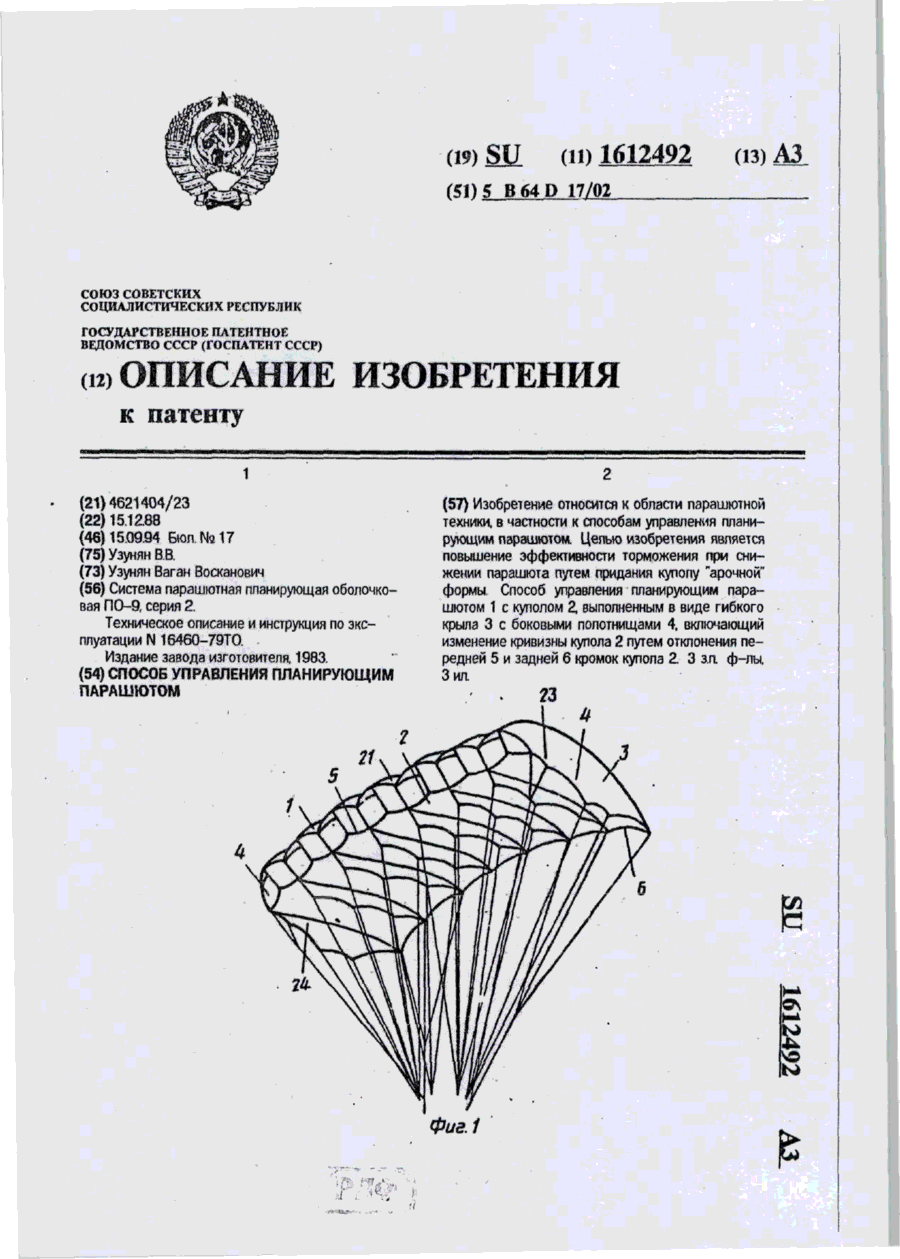
1. Способ управления планирующим парашютом, включающий изменение кривизны купола путем отклонения задней его кромки, отличающийся тем, что, с целью повышения эффективности торможения при снижении парашюта путем придания куполу «арочной» формы, одновременно с отклонением задней кромки купола осуществляют отклонение и передней его кромки.2. Способ по п. 1, отличающийся тем, что дополнительно с отклонением передней и задней кромок...
Попередній патент: Блочний металевий носій для каталізатору очистки відхідних газів та спосіб його виготовлення
Наступний патент: Аудиторна дошка
Випадковий патент: Спосіб комбінованої регіонарної анестезії лапароскопічних гінекологічних операцій