Спосіб відновлення активних рухів плеча та пристрій для його виконання
Формула / Реферат
1. Спосіб відновлення активних рухів плеча, який включає виконання артродезу плечового суглоба з внутрішньою ротацією під кутом 35 - 45 градусів, згинанням під кутом 5 - 15 градусів і відведенням відносно повздовжньої осі тулуба, який відрізняється тим, що додатково перед виконанням артродезу, емулюють післяопераційне положення плеча шляхом його фіксації до лопатки під кутом 30 - 65 градусів відносно повздовжньої осі тулуба у фронтальній площині та, контролюючи функцію верхньої кінцівки при зміні кута відведення плеча, визначають кут його максимального відведення і виконують артродез.
2. Пристрій для фіксації плечового суглоба, який включає кронштейн, втулку та стопорні гвинти, який відрізняється тим, що кронштейн виконаний Т-подібним, на довшому коліні якого закріплений тримач а можливістю обертання відносно осі, куди кріпиться трубчаста втулка з можливістю осьового переміщення, а в середині останньої проходить штанга, до одного з кінців якої одновісьовим шарніром прикріплена манжета з пасками для фіксації плеча, при цьому коліна кронштейна взаємодіють з фіксаторами кісткових гвинтів, встановлених з можливістю переміщення та обертання відносно колін кронштейна.
3. Пристрій за п.2, який відрізняється тим, що кронштейн виконаний Г-подібним.
Текст
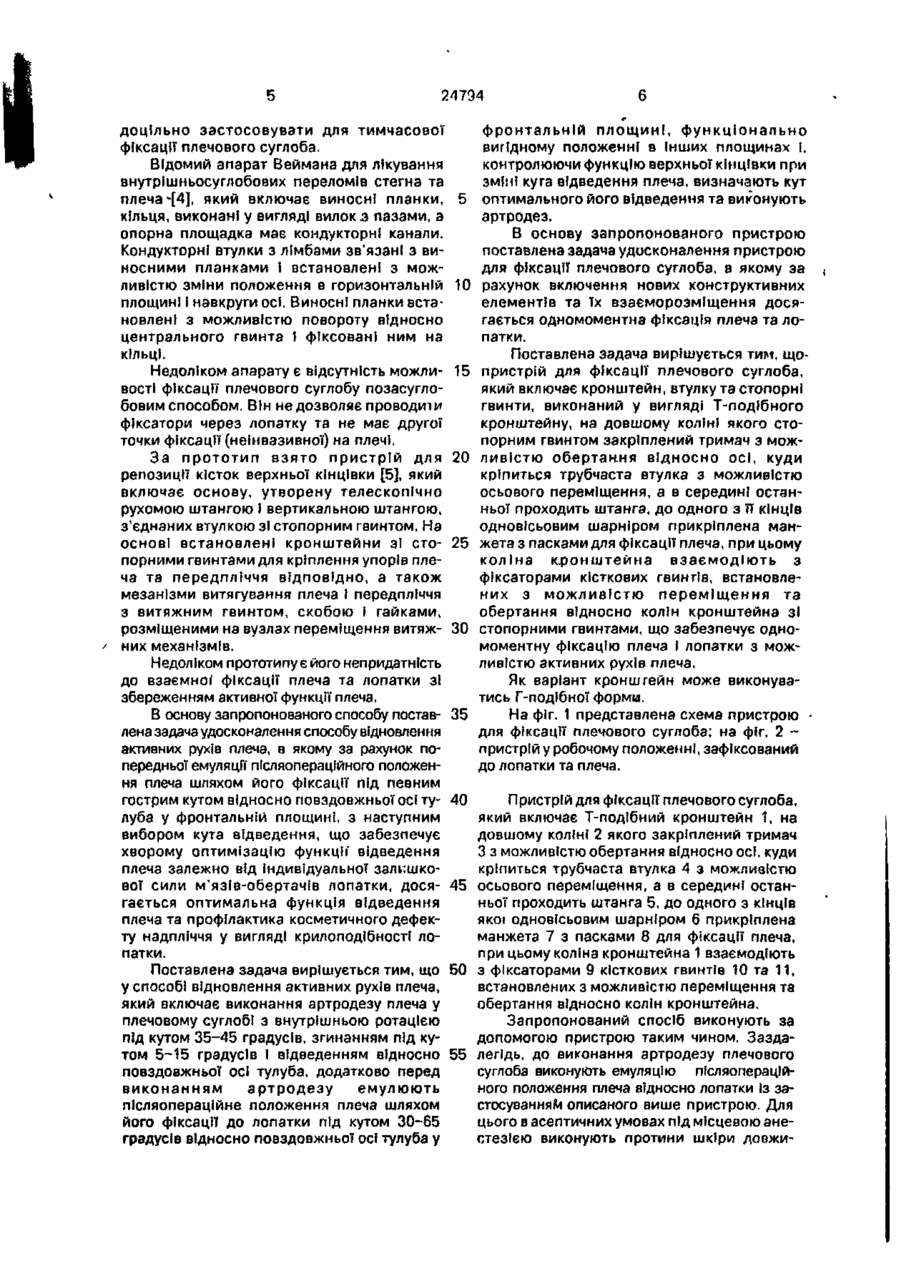
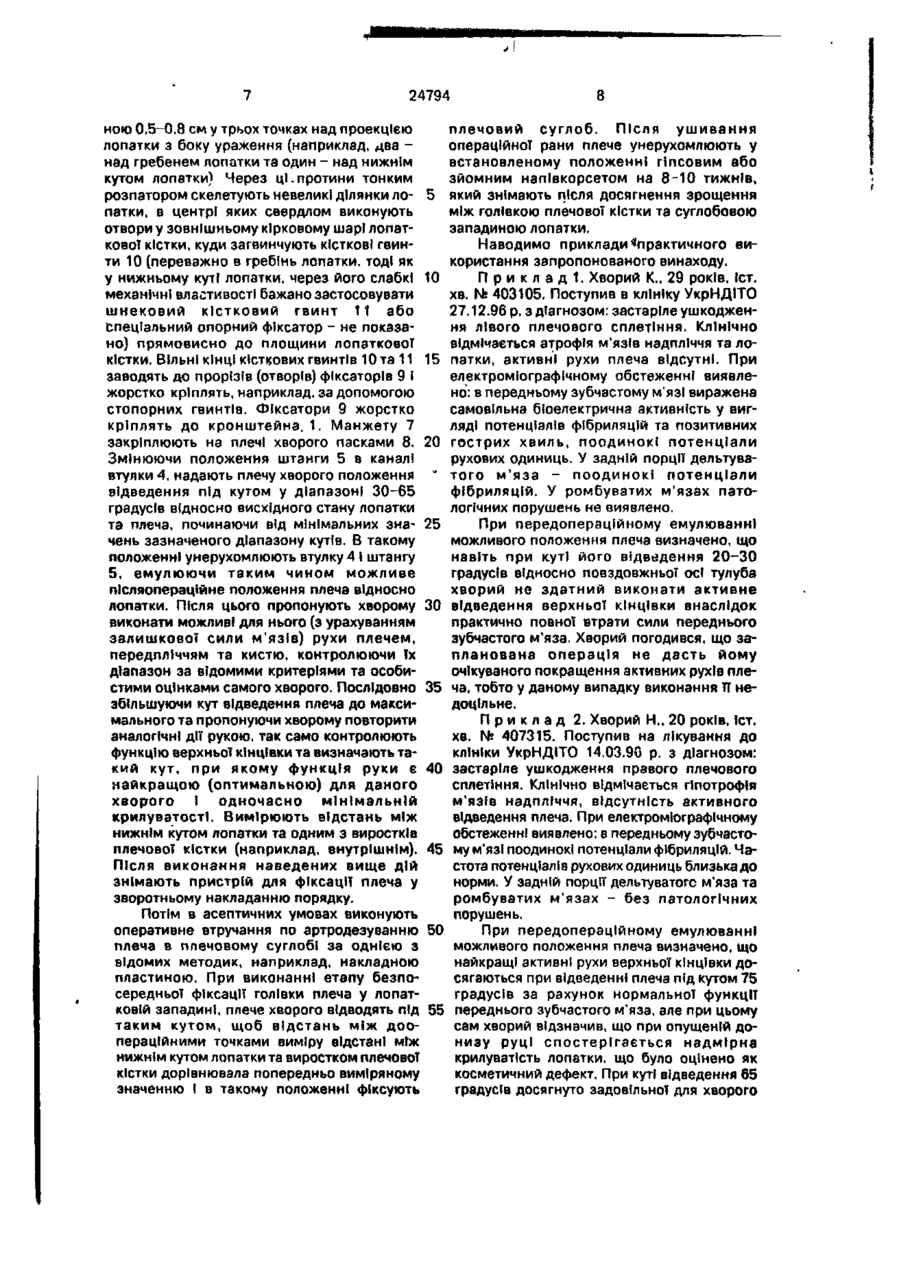
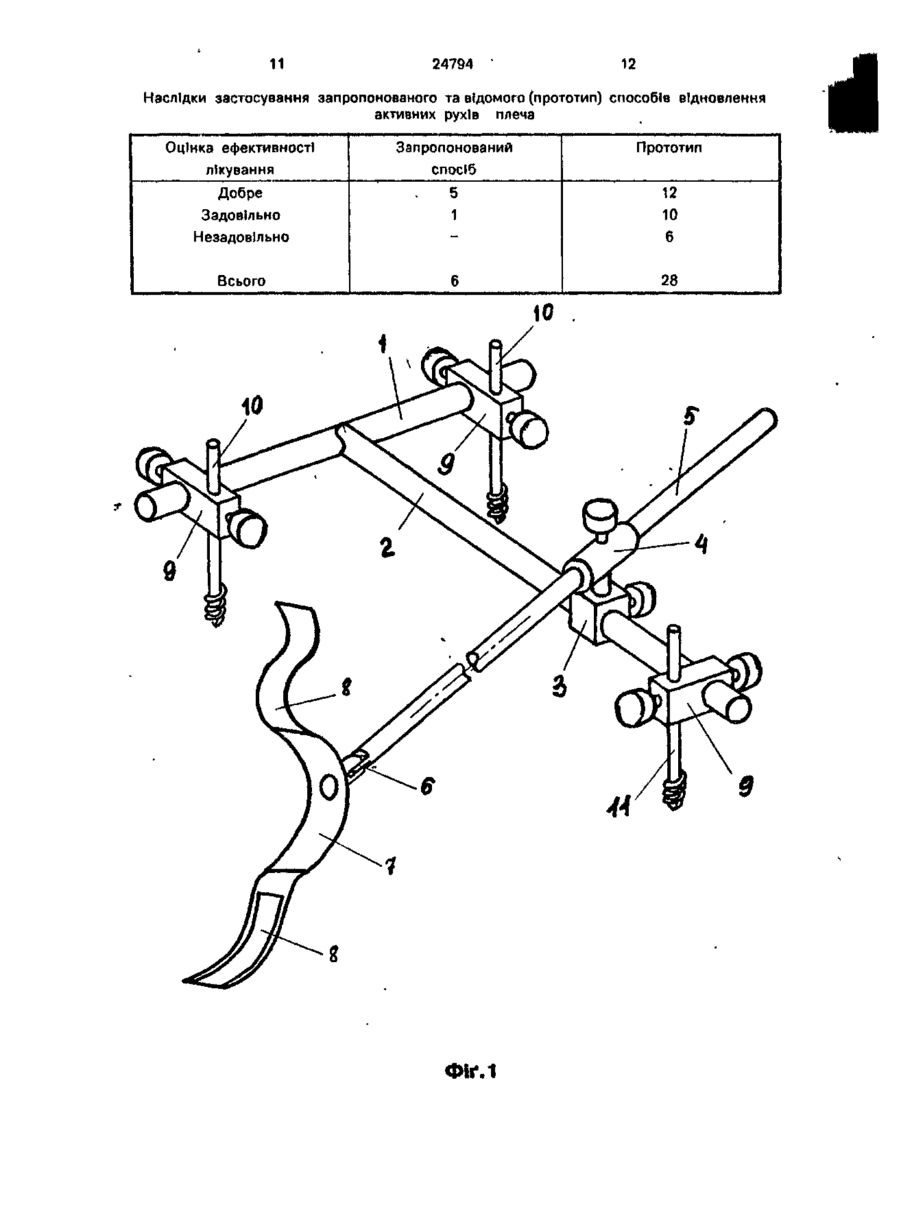
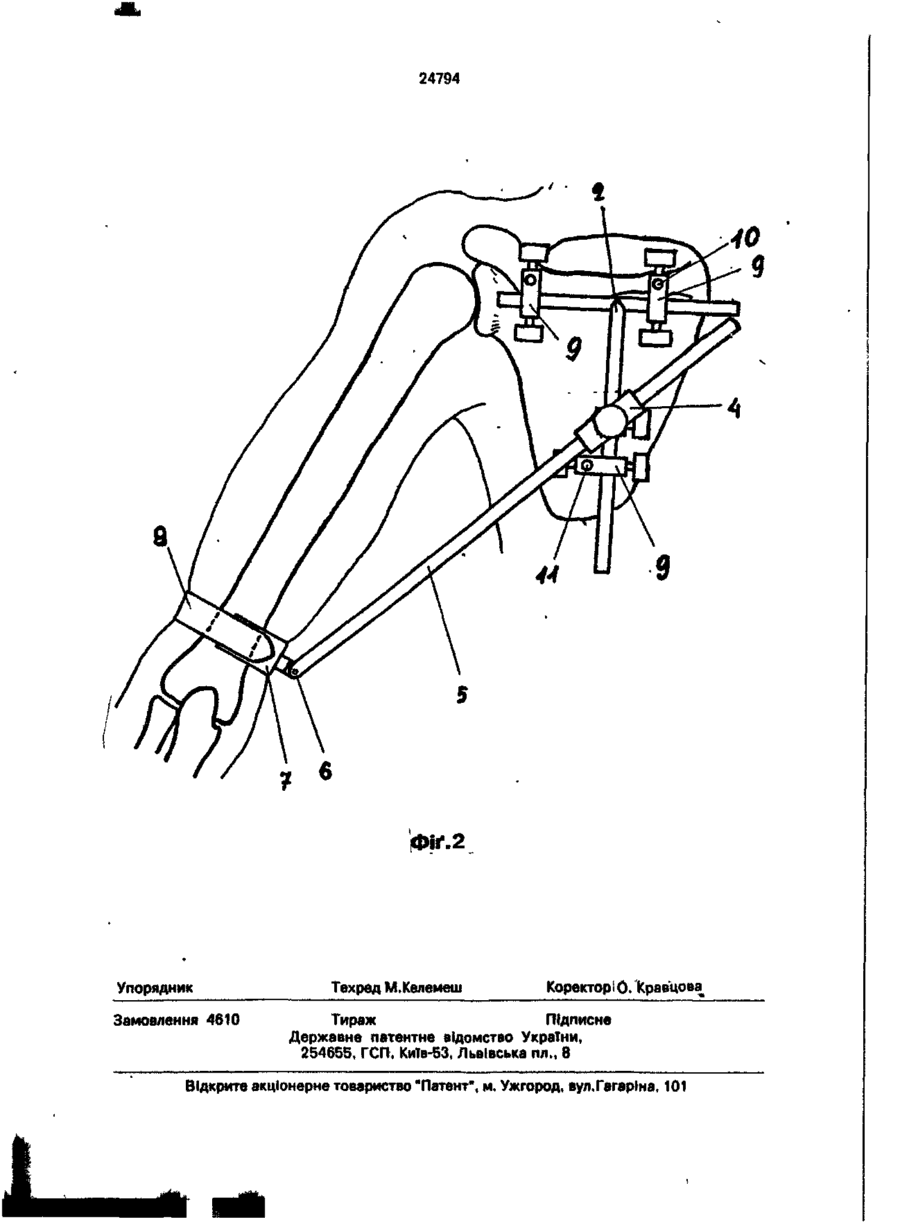
1. Спосіб відновлення активних рухів плеча, який включає виконання артродезу плечового суглоба з внутрішньою ротацією під кутом 35-45 градусів, згинанням під ку 2. Пристрій для фіксації плечового суглоба, який включає кронштейн, втулку та стопорні гвинти, який в і д р і з н я є т ь с я тим, що кронштейн виконаний Т-подІбним, на до-' вшому коліні якого закріплений тримач з можливістю обертання відносно осі, куди кріпиться трубчаста втулка з можливістю осьового переміщення, а в середині останньої проходить штанга, до одного з кінців якої одновісьовим шарніром прикріплена манжета з пасками для фіксації плеча, при цьому коліна кронштейна взаємодіють з фіксаторами кісткових гвинтів, встановлених з можливістю переміщення та обертання відносно колін кронштейна. 3. Пристрій за п. 2, який в і д р і з н я є т ь с я тим, що кронштейн виконаний Г-подібним. Винахід відноситься до медицини, зокрема до ортопедії, І може бути ви користаний для хірургічного лікування ушкоджень плечового сплетіння1 з паралічем N; 1445716, кл. А 61 В 17/58, опублик. 1988, Бюл. № 47 (прототип). 24794 Наведені недоліки випливають із того, м'язів верхньої КІНЦІВКИ та плечового пояса, що "до операції неможливо виміряти силу Інервованих верхнім та середнім CToe6vpaMH переднього зубчастого м'яза відомими метоплечового сплетіння з порушенням активних дами динамометрії через складність рухів плеча. При ураженні плечового сплетіння випа- 5 біомеханіки рухів лопатки та відсутність точки її опори для вимірювання. Через це кут 'дає функція Інервованих ним м'язів плечововідведення плеча при його артродезу ванні го пояса та верхньої кінцівки (дельтоподібного грунтується лише на емпіричному досвіді та надвістюкового, як головних відводичів хірурга, що підтверджується неусталеністю плеча), внаслідок чого порушується фіксація плеча в плечовому суглобі з його активним 10 оптимального кута відведення плеча та дуже значним діапазоном його коливань - від 20 відведенням в усьому можливому діапазоні до 90 градусів. рухів. Необхідними компонентами положення ВІДОМІ способи хірургічного лікування плеча при його артродезуванні є внутрішня зазначеного ураження, що полягають у виконанні сухожилково-м'язових транспозицій 15 ротація (під кутом в середньому 40 градусів) та згинання (під кутом в середньому 10 шляхом заміщення втраченої функції дельградусів), але ці кути є достатньо усталеними топодібного м'яза (m. deltoideus) за рахунок і легко моделюються, виходячи з потреб транспозиції, наприклад, трапецієподібного функції кисті та з урахуванням рухів м'яза (m. trapezius)[1 ] або найширшого м'яза спини (т. latissimus dorsi) [2]. 20 передпліччя в ліктьовому суглобі. Для відновлення активних рухів плеча при ушГоловними недоліками цих способів (сукодженні плечового сплетіння з паралічем хожилково-м'язових транспозицій) є те, що м'язів верхньої кінцівки та плечового пояса в тих випадках, коли придатні для за рахунок м'язів-обертачів лопатки транспозиції м'язи мають достатню силу, вони не забезпечують стабільної зовнішньої 25 (переднього зубчастого, ромбуватих та трапецієподібного) шляхом артродезування ротації плеча й відповідно, достатніх активплеча в плечовому суглобі у відведеному поних рухів верхньої кінцівки. У більшості ложенні, велике значення має залишкова сипацієнтів ці способи виконати неможливо ла наведених м'язів, які також інервуються з через недостатню силу м'язів, що належать до транспозиції, бо вони також отримують ЗО плечового сплетіння, а тому можуть бути ослабленими. Вимірювання їх сили відомими інервацію ураженого плечового сплетіння. динамометричними методами неможливе За прототип запропонованого способу через відсутність точки опори лопатки при нами вибраний спосіб відновлення активних такому вимірюванні. Тому єдиною реальною рухів плеча, що полягає в здійсненні можливістю визначення кута артродезування артродезу плечового суглоба під кутом ЗО- 35 з урахуванням наведених вище особливостей 65 градусів відносно повздовжньої осі тулузалишається доопераційна емуляція ба, внаслідок чого забезпечується результатів артродезу шляхом тимчасової відведення плеча за рахунок обертання лофіксації плеча відносно лопатки з наступним патки відносно сагітальної осі під дією трапецієподібного, переднього зубчастого 40 контролем рухової функції" верхньої кінцівки пацієнта при різних кутах його відведення. та ромбуватих м'язів [3]. Недоліками прототипу є неоптиПринциповою особливістю, що значно мальність функції плеча у конкретного знижує стабільність кріплення пристроїв хворогов залежності від індивідуальної зазовнішньої фіксації до тонких плоских лишкової сили м'язів-обертачів лопатки, що 45 кісток, зокрема до лопатки, є низька меполягає в обмеженні або повній відсутності ханічна міцність останніх у поєднанні з маактивних рухів плеча при значному ослаблою товщиною, через що застосування таких ленні сили переднього зубчастого м'яза загально розповсюджених фіксаторів, як (М0-М1) і будь-якому куті відведення плеча різьбові кісткові стержні (навіть зі шнековою при його артродезі, а також невикористанні 50 різьбою) практично неможливе, особливо всього діапазону рухів плеча при наявності якщо фіксація пов'язана зі значними медостатньої сили переднього зубчастого ханічними навантаженнями. м'яза (М4-М5) і малих кутах відведення плеБІЛЬШІСТЬ відомих занурюваних у тканича при його артродезі (30-40 градусів), наявність косметичного дефекту надпліччя, що 55 ни фіксатори кісток виконані у вигляді пластинок, що кріпляться гвинтами до кісткових полягає в крилоподібності лопатки при викоструктур, які призначені для постійної нанні артродезу плеча з великим кутом його фіксації при переломах та артродезах, Головідведення (понад 50-70 градусів) І недовним недоліком таких фіксаторів є надмірна статній силі переднього зубчастого м'яза травматичність установки, через що їх не(М1-МЗ). 24794 доцільно застосовувати для тимчасової фіксації плечового суглоба. Відомий апарат Веймана для лікування внутрішньосуглобових переломів стегна та плеча v [4], який включає виносні планки, 5 кільця, виконані у вигляді вилок з пазами, а опорна площадка має кондукторні канали. Кондукторні втулки з лімбами зв'язані з виносними планками І встановлені з можливістю зміни положення в горизонтальній 10 площині І навкруги осі. Виносні планки встановлені з можливістю повороту відносно центрального гвинта 1 фіксовані ним на кільці. Недоліком апарату є відсутність можли- 15 вості фіксації плечового суглобу позасуглобовим способом. Він не дозволяє проводити фіксатори через лопатку та не має другої точки фіксації (неінвазивної) на плечі. За п р о т о т и п взято п р и с т р і й для 20 репозиції кісток верхньої кінцівки [5], який включає основу, утворену телескопічно рухомою штангою і вертикальною штангою, з'єднаних втулкою зі стопорним гвинтом. На основі встановлені кронштейни зі сто- 25 порними гвинтами для кріплення упорів плеча та передпліччя відповідно, а також мезанізми витягування плеча і передпліччя з витяжним гвинтом, скобою І гайками, розміщеними на вузлах переміщення витяж- ЗО них механізмів. Недоліком прототипу є його непридатність до взаємної" фіксації плеча та лопатки зі збереженням активної функції плеча. В основу запропонованого способу постав- 35 лена задача удосконалення способу відновлення активних рухів плеча, в якому за рахунок попередньої емуляції післяопераційного положення плеча шляхом його фіксації під певним гострим кутом відносно повздовжньої осі ту- 40 луба у фронтальній площині, з наступним вибором кута відведення, що забезпечує хворому оптимізацію функції' відведення плеча залежно від Індивідуальної залишкової сили м'язів-обертачів лопатки, дося- 45 гається оптимальна функція відведення плеча та профілактика косметичного дефекту надпліччя у вигляді крилоподібності лопатки. Поставлена задача вирішується тим, що БО у способі відновлення активних рухів плеча, який включає виконання артродезу плеча у плечовому суглобі з внутрішньою ротацією під кутом 35-45 градусів, згинанням під кутом 5-15 градусів І відведенням відносно 55 повздовжньої осі тулуба, додатково перед виконанням артродезу емулюють післяопераційне положення плеча шляхом його фіксації до лопатки під кутом 30-65 градусів відносно повздовжньої осі тулуба у фронтальній п л о щ и н ! , ф у н к ц і о н а л ь н о вигідному положенні в Інших площинах І, контролюючи функцію верхньої кінцівки при зміні куга відведення плеча, визначають кут оптимального його відведення та виконують артродез. В основу запропонованого пристрою поставлена задача удосконалення пристрою для фіксації плечового суглоба, в якому за рахунок включення нових конструктивних елементів та їх взаєморозміщення досягається одномоментна фіксація плеча та лопатки. Поставлена задача вирішується тим, що* пристрій для фіксації плечового суглоба, який включає кронштейн, втулку та стопорні гвинти, виконаний у вигляді Т-подібного кронштейну, на довшому коліні якого стопорним гвинтом закріплений тримач з можливістю обертання відносно осі, куди кріпиться трубчаста втулка з можливістю осьового переміщення, а в середині останньої проходить штанга, до одного з її кінців одновісьовим шарніром прикріплена манжета з пасками для фіксації плеча, при цьому коліна к р о н ш т е й н а в з а є м о д і ю т ь з фіксаторами кісткових гвинтів, встановлених з м о ж л и в і с т ю п е р е м і щ е н н я та обертання відносно колін кронштейна зі стопорними гвинтами, що забезпечує одномоментну фіксацію плеча і лопатки з можливістю активних рухів плеча. Як варіант кронштейн може виконуватись Г-подІбної форми. На фіг. 1 представлена схема пристрою для фіксації плечового суглоба; на фіг. 2 пристрій у робочому положенні, зафіксований до лопатки та плеча. Пристрій для фіксації плечового суглоба, який включає Т-подібний кронштейн 1, на довшому коліні 2 якого закріплений тримач З з можливістю обертання відносно осі, куди кріпиться трубчаста втулка 4 з можливістю осьового переміщення, а в середині останньої проходить штанга 5, до одного з кінців якої одновісьовим шарніром 6 прикріплена манжета 7 з пасками 8 для фіксації плеча, при цьому коліна кронштейна 1 взаємодіють з фіксаторами 9 кісткових гвинтів 10 та 11, встановлених з можливістю переміщення та обертання відносно колін кронштейна. Запропонований спосіб виконують за допомогою пристрою таким чином. Заздалегідь, до виконання артродезу плечового суглоба виконують емуляцію післяопераційного положення плеча відносно лопатки із застосуванням описаного више пристрою. Для цього в асептичних умовах під місцевою анестезією ВИКОНУЮТЬ ПрОТИНИ ШКІрИ ДО8ЖИ 24794 8 плечовий суглоб. Після ушивання ною 0,5-0,8 см у трьох точках над проекцією операційної рани плече унерухомлюють у лопатки з боку ураження (наприклад, два встановленому положенні гіпсовим або над гребенем лопатки та один - над нижнім зйомним напівкорсетом на 8-Ю тижнів, кутом лопатки) Через ці.протини тонким розпатором скелетують невеликі ділянки ло- 5 який знімають після досягнення зрощення між голівкою плечової кістки та суглобовою патки, в центрі яких свердлом виконують западиною лопатки. отвори у зовнішньому кірковому шарі лопаткової кістки, куди загвинчують кісткові гвинНаводимо приклади ^практичного вити 10 (переважно в гребінь лопатки, тоді як користання запропонованого винаходу. у нижньому куті лопатки, через його слабкі 10 П р и к л а д і . Хворий К., 29 років, Іст. механічні властивості бажано застосовувати хв. № 403105. Поступив в клініку УкрНДІТО шнековий кістковий гвинт 11 або 27.12.96 р. з діагнозом: застаріле ушкодженспеціальний опорний фіксатор - не показаня лівого плечового сплетіння. Клінічно но) прямовисно до площини лопаткової відмічається атрофія м'язів надпліччя та локістки. Вільні кінці кісткових гвинтів Юта 11 15 патки, активні рухи плеча відсутні. При заводять до прорізів (отворів) фіксаторів 9 і електроміографічному обстеженні виявлежорстко кріплять, наприклад, за допомогою но: в передньому зубчастому м'язі виражена стопорних гвинтів. Фіксатори 9 жорстко самовільна біоелектрична активність у вигкріплять до кронштейна. 1. Манжету 7 ляді потенціалів фібриляцій та позитивних закріплюють на плечі хворого пасками 8. 20 гострих хвиль, поодинокі потенціали Змінюючи положення штанги 5 в каналі рухових одиниць. У задній порції дельтувавтулки 4, надають плечу хворого положення того м'яза - поодинокі потенціали відведення під кутом у діапазоні 30-65 фібриляцій. У ромбуватих м'язах патоградусів відносно висхідного стану лопатки логічних порушень не виявлено. та плеча, починаючи від мінімальних зна- 25 При передопераційному емулюванні чень зазначеного діапазону кутів. В такому можливого положення плеча визначено, що положенні унерухомлюють втулку 41 штангу навіть при куті його відведення 20-30 5, емулюючи таким чином можливе градусів відносно повздовжньої осі тулуба післяопераційне положення плеча відносно хворий не здатний виконати активне лопатки. Після цього пропонують хворому ЗО відведення верхньої кінцівки внаслідок виконати можливі для нього (з урахуванням практично повної втрати сили переднього залишкової сили м'язів) рухи плечем, зубчастого м'яза. Хворий погодився, що запередпліччям та кистю, контролюючи їх планована операція не дасть йому діапазон за відомими критеріями та особиочікуваного покращення активних рухів плестими оцінками самого хворого. Послідовно 35 ча, тобто у даному випадку виконання ЇЇ незбільшуючи кут відведення плеча до максидоцільне. мального та пропонуючи хворому повторити П р и к л а д 2. Хворий Н.» 20 років, Іст. аналогічні дії рукою, так само контролюють хв. № 407315. Поступив на лікування до функцію верхньої КІНЦІВКИ та визначають таклініки УкрНДІТО 14.03.9G р. з діагнозом: кий кут, при якому функція руки є 40 застаріле ушкодження правого плечового найкращою (оптимальною) для даного сплетіння. Клінічно відмічається гіпотрофія хворого і одночасно мінімальній м'язів надпліччя, відсутність активного крилуватості. Вимірюють відстань між відведення плеча. При електроміографічному нижнім кутом лопатки та одним з виростків обстеженні виявлено: в передньому зубчастоплечової кістки (наприклад, внутрішнім). 45 му м'язі поодинокі потенціали фібриляцій. ЧаПісля виконання наведених вище дій стота потенціалів рухових одиниць близька до знімають пристрій для фіксації плеча у норми. У задній порції дельтуватогс м'яза та зворотньому накладанню порядку. ромбуватих м'язах - без патологічних Потім в асептичних умовах виконують порушень. оперативне втручання по артродезуванню 50 При передопераційному емулюванні плеча в плечовому суглобі за однією з можливого положення плеча визначено, що відомих методик, наприклад, накладною найкращі активні рухи верхньої кінцівки допластиною. При виконанні етапу безпосягаються при відведенні плеча під кутом 75 середньої фіксації голівки плеча у лопатградусів за рахунок нормальної функції ковій западині, плече хворого відводять під 55 переднього зубчастого м'яза, але при цьому таким кутом, щоб відстань між доосам хворий відзначив, що при опущеній допераційними точками виміру відстані між низу руці спостерігається надмірна нижнім кутом лопатки та виростком плечової крилуватість лопатки, що було оцінено як кістки дорівнювала попередньо виміряному косметичний дефект. При куті відведення 65 значенню і в такому положенні фіксують градусів досягнуто задовільної для хворого 24794 10 функції верхньої кінцівки при практично неконане 6 хворим. Післяопераційний кут помітній крилуватості лопатки. * відведення плеча становив 30-65 градусів (в • середньому 51 ±7 градусів). У всіх шести виВиконаний артродез плеча в плечовому суглобі під кутами: відведення - 65 градусів, падках був досягнутий позитивний результат внутрішня ротація - 40 градусів, згинання - 5 (значне покращення та покращення функції 10 градусів. Після операції накладений плеча, відповідно добрий та задовільний гіпсовий напівкорсет на 10 тижнів до досягрезультати). Хворих, незадоволених нення зрощення в плечовому суглобі, після результатами оперативного лікування не спочого виконано курс кінезіотерапії (ЛФК, мастерігалось). саж). При контрольному огляді хворого 10 через 4 місяці після операції функція Результати застосування запропонованого верхньої кінцівки добра, наслідками способу відновлення активних рухів плеча оперативного лікування хворий повністю запорівнювалися з наслідками оперативного доволений. лікування 28 хворих, яким був виконаний П р и к л а д 3. Хворий Ч., ЗО років, іст. 15 артродез плечового суглоба за методикою, аналогічною запропонованому способу, але без похв. № 417469. Поступив на лікування до переднього емулювання післяопераційного клініки УкрНДІТО 15.01.91 р з діагнозом: відведення плеча, причому кут відведення застаріле ушкодження правого плечового плеча вибирався емпірично лікарем на сплетіння. Клінічно відмічається гіпотрофія м'яз5в надпліччя та лопатки, активні рухи 20 підставі власного досвіду І складав 35-75 градусів (в середньому 54 ±6 градусів), що за плеча відсутні. При електромюграфічному t-критерієм Стьюдента статистично не обстеженні виявлено: в передньому зубчавідрізняється від кута відведення, досягнустому м'яз) помірна самовільна біоелектрична того при виконанні запропонованого споактивність у вигляді потенціалів фібриляцій та позитивних гострих хвиль, частота по- 25 собу (Р>0, 05). Порівняння наслідків застосування запропонованого та відомого спотенціалів рухових одиниць знижена. У задній собів наведене в таблиці. порції дельтуватого м'яза та ромбуватих м'язах - без певних патологічних порушень. Різниця між якісними показниками ефективності лікування, наведеними в табПри передопе^ аційному емулюванні можливого положення плеча визначено, що 30 лиці за критерієм "ХІ-квадрат" є статистично достовірною (Р < 0,05), що підтверджує ефекнайкращі активні рухи верхньої кінцівки дотивність запропонованого способу. сягаються при відведенні плеча лід кутом З О градусів І погіршуються при збільшенні кута Переваги запропонованого способу та відведення (емуляція виконувалася до кута пристрою полягають у тому, що завдяки повідведення 50 градусів) внаслідок вираженої $5 передньому емулюванню положення плеча слабкості переднього зубчастого м'яза. відносно тулуба з апробацією функції плеча, Виконаний артродез плеча в плечовому яка передбачається після операції, можна cyr/юбі під кутами: відведення - ЗО градусів, підібрати такий кут його відведення, при внутрішня ротація - 40 градусів, згинання якому хворий отримує максимально можли10 градусів. Після операції накладений 40 ву функцію верхньої кінцівки після виконангіпсовий напівкорсет на 8 тижнів до досягня артродезування плечового суглоба. нення зрощення в плечовому суглобі, після Причому ще до операції хворий може чого виконано курс кінезіотерапії (ЛФК, маоцінити можливі наслідки операційного саж). При контрольному огляді хворого втручання та погодитися чи відмовитися від через 6 місяців після операції функція 45 нього через недостатність функції, що верхньої кінцівки задовільна, наслідками очікується після цього. Крім того, по-перше, оперативного лікування хворий задоволедосягається максимізація можливого ний. відновлення активних рухів плеча у конкретного хворого з урахуванням його Запропонований спосіб відновлення ак- 50 Індивідуальної залишкової сили м'язів і, потивних рухів плеча та пристрій для його друге, є можливість уникнути операції, що здійснення був апробований при лікуванні 8 вочевидь не дасть позитивних наслідків. Тахворих з паралітичною дисфункцією плеча. ким чином, хворий самостійно оцінюючи ще За наслідками попереднього емулювання до проведення операції функцію, на яку післяопераційного положення плеча 2 55 очікує, уникає розчарування від наслідків хворих відмовилися від оперативного оперативного лікування, що забезпечує втручання через його функціональну неейому максимальний післяопераційний псифективність. Оперативне втручання було вихологічний комфорт. 11 24794 12 Наслідки застосування запропонованого та відомого (прототип) способів відновлення активних рухів плеча Оцінка ефективності лікування Запропонований спосіб Прототип Добре Задовільно Незадовільно 5 12 1 — 10 Всього б 28 Фіґ.1 6 24794 8 Фіґ.2 Упорядник Замовлення 4610 Техред М.Келемеш Коректор! О. Кравцова^ Тираж Підписне Державне патентне відомство України, 254655, ГСП, КиТв-53, Львівська пл., 8 відкрите акціонерне товариство "Патент", м. Ужгород, вул.Гагаріна, 101
ДивитисяДодаткова інформація
Автори англійськоюStrafun Serhii Semenovych
Автори російськоюСтрафун Сергей Семенович
МПК / Мітки
МПК: A61B 17/56, A61B 17/58
Мітки: виконання, плеча, спосіб, відновлення, активних, пристрій, рухів
Код посилання
<a href="https://ua.patents.su/8-24794-sposib-vidnovlennya-aktivnikh-rukhiv-plecha-ta-pristrijj-dlya-jjogo-vikonannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб відновлення активних рухів плеча та пристрій для його виконання</a>
Спосіб відновлення рухів у суглобах кінцівок

Номер патенту: 21092
Опубліковано: 04.11.1997
Автор: Щокін Олег Васильович
МПК: A61F 5/00
Мітки: спосіб, рухів, суглобах, кінцівок, відновлення
Формула / Реферат:
Способ восстановления движений в суставах конечностей путем чередования сеансов разработки движений в пределах безболезненности с периодами жесткой фиксации конечности, отличающийся тем, что разработку движений осуществляют в три последовательных клинических периода, причем в первом периоде фиксацию конечности осуществляют только в направлении, противоположном начальной иммобилизации, положение конечности поэтапно пассивно изменяют...
Спосіб оперативного лікування привичного переднього піддзьобоподібного вивиху плеча
Номер патенту: 22514
Опубліковано: 17.03.1998
Автори: Костюк Володимир Григорович, Кисіль Ігор Юр'євич, Шапаренко Павло Пилипович, Фіщенко Володимир Олександрович
МПК: A61B 17/56
Мітки: вивиху, переднього, спосіб, привичного, оперативного, плеча, піддзьобоподібного, лікування
Формула / Реферат:
Спосіб оперативного лікування привичного переднього піддзьобоподібного вивиху плеча шляхом усунення простору між переднім краєм суглобової западини і підлопатковим м'язом, який відрізняється тим, що верхню третину сухожилка підлопаткового м'яза підшивають до основи дзьобоподібного відростка.
Спосіб виміру швидкості звуку і пристрій для його виконання
Номер патенту: 14170
Опубліковано: 25.04.1997
Автори: Бабій Владлен Іванович, Бабій Маргарита Василівна
МПК: G01F 1/66, G01N 29/07, G01H 5/00, G01H 9/00
Мітки: виміру, спосіб, пристрій, виконання, швидкості, звуку
Формула / Реферат:
1. Способ измерения скорости звука, заключающийся в том, что излучают акустические импульсы в исследуемую среду и регистрируют время прохождения ими заданного расстояния, по которому определяют скорость звука, отличающийся тем, что, с целью повышения точности, регистрацию времени прохождения акустических импульсов осуществляют по моментам изменения фазы световой волны сфокусированного когерентного излучения, перпендикулярного направлению...
Спосіб лікування нестабільності плеча
Номер патенту: 23309
Опубліковано: 31.08.1998
Автори: Сухін Віталій Петрович, Сухін Юрій Віталійович, Бабоша Валентин Олександрович
МПК: A61B 17/56
Мітки: нестабільності, спосіб, плеча, лікування
Формула / Реферат:
Способ лечения нестабильности плеча, включающий внутрикостное проведение ленты через канал в подбугорковой области плеча, выведение ее в одну точку на головке плеча, проведение ее через каналы в акромиальном отростке лопатки, ушивание ее в подбугорковой области плеча, отличающийся тем, что передний конец ленты проводят через канал на 5 мм выше переднего отверстия канала в подбугорковой области плеча, выходное отверстие которого располагается...
Спосіб вибухозахисту електрообладнання та пристрій для його виконання
Номер патенту: 9332
Опубліковано: 30.09.1996
Автори: Хорунжий Михайло Валентинович, Коринев Борис Львович, Погорільскій Абрам Овсієвич, Торгашев Віктор Семенович, Іхно Володимир Опанасович, Черніков Микола Олександрійович, Пархоменко Олександр Іванович, Колосюк Володимир Петрович, Дикий Юрій Олександрович, Шевченко Микола Пилипович, Коптіков Віктор Павлович
Мітки: вибухозахисту, виконання, спосіб, пристрій, електрообладнання
Формула / Реферат:
1. Способ взрывозашиты электрооборудования, основанный на контроле концентрации взрывоопасной среды во взрывоопасных зонах и автоматическом отключении группового защитного аппарата при достижении концентрацией заданной уставки, локализацию возможного взрыва внутри защитных оболочек электрооборудования, а также контроле исправности отключенной сети, отличающийся тем, что, с целью повышения безопасности в режиме обслуживания, снижения...
Попередній патент: Привантаж для ущільнення бетонної суміші у формі
Наступний патент: Спосіб обробітку грунту під посадку супер-супереліти картоплі з мікробульб
Випадковий патент: Спосіб підвищення продуктивності птиці