Пристрій для дистанційного руйнування конструкцій
Номер патенту: 42855
Опубліковано: 15.11.2001
Автори: Боден Франсуа, Мартен Людовік, Лєбьєз Жорж, Вівьє Франк
Формула / Реферат
1. Пристрій для дистанційного руйнування конструкцій, який містить опору для конструкції, модуль, на якому закріплена головка різання пристрою викидання під тиском води й абразивних часток, який відрізняється тим, що модуль виконаний рухливим щодо конструкції й орієнтованим у просторі, при цьому на ньому закріплені датчик відстані до конструкції, дозиметр і пристрій дезактивації.
2. Пристрій за п.1, який відрізняється тим, що модуль занурений в рідину для руйнування зануреної в рідину конструкції.
3. Пристрій за будь-яким з пп.1 або 2, який відрізняється тим, що він додатково містить, щонайменше, одну відеокамеру спостереження за конструкцією.
4. Пристрій за п. 3, який відрізняється тим, що відеокамера спостереження розташована з можливістю спостереження рухливого модуля.
5. Пристрій за п.1, який відрізняється тим, що датчик відстані до конструкції виконаний у вигляді щупа, розташованого коаксіально з головкою різання.
6. Пристрій за п.1, який відрізняється тим, що пристрій дезактивації виконаний у вигляді вертушки викидання струменя води під тиском.
7. Пристрій за п.1, який відрізняється тим, що модуль закріплений з можливістю переміщення навколо всієї конструкції і орієнтування в будь-якому напрямку.
8. Пристрій за п.1, який відрізняється тим, що він додатково містить пристрій збору абразивних часток і дрібних відходів різання.
9. Пристрій за п.8, який відрізняється тим, що пристрій збору містить фільтри.
10. Пристрій за п.9, який відрізняється тим, що пристрій збору містить засіб видалення осаду з фільтрів шляхом їхнього промивання.
11. Пристрій за, п.8, який відрізняється тим, що пристрій збору містить
пристрій розтинання струменя.
Текст
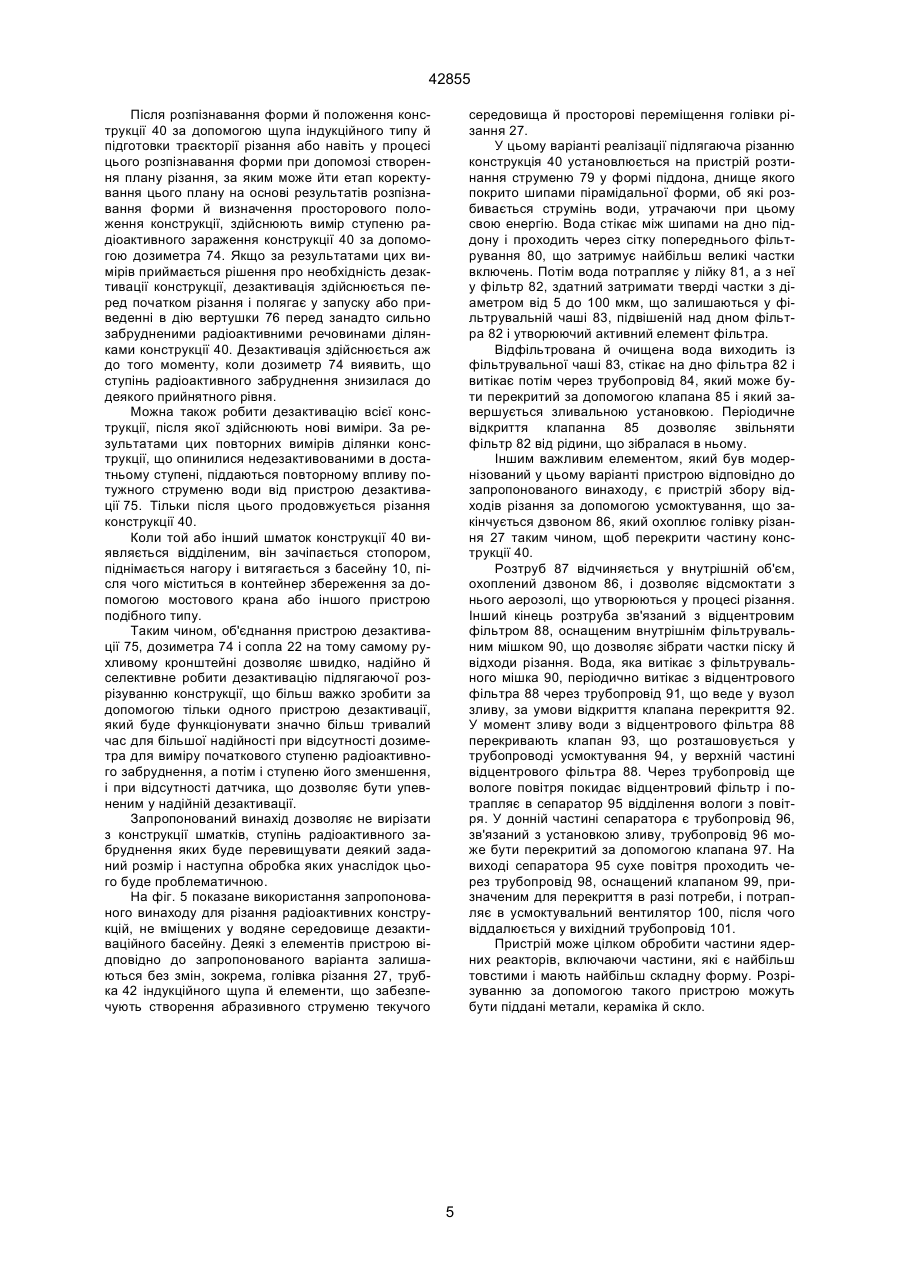
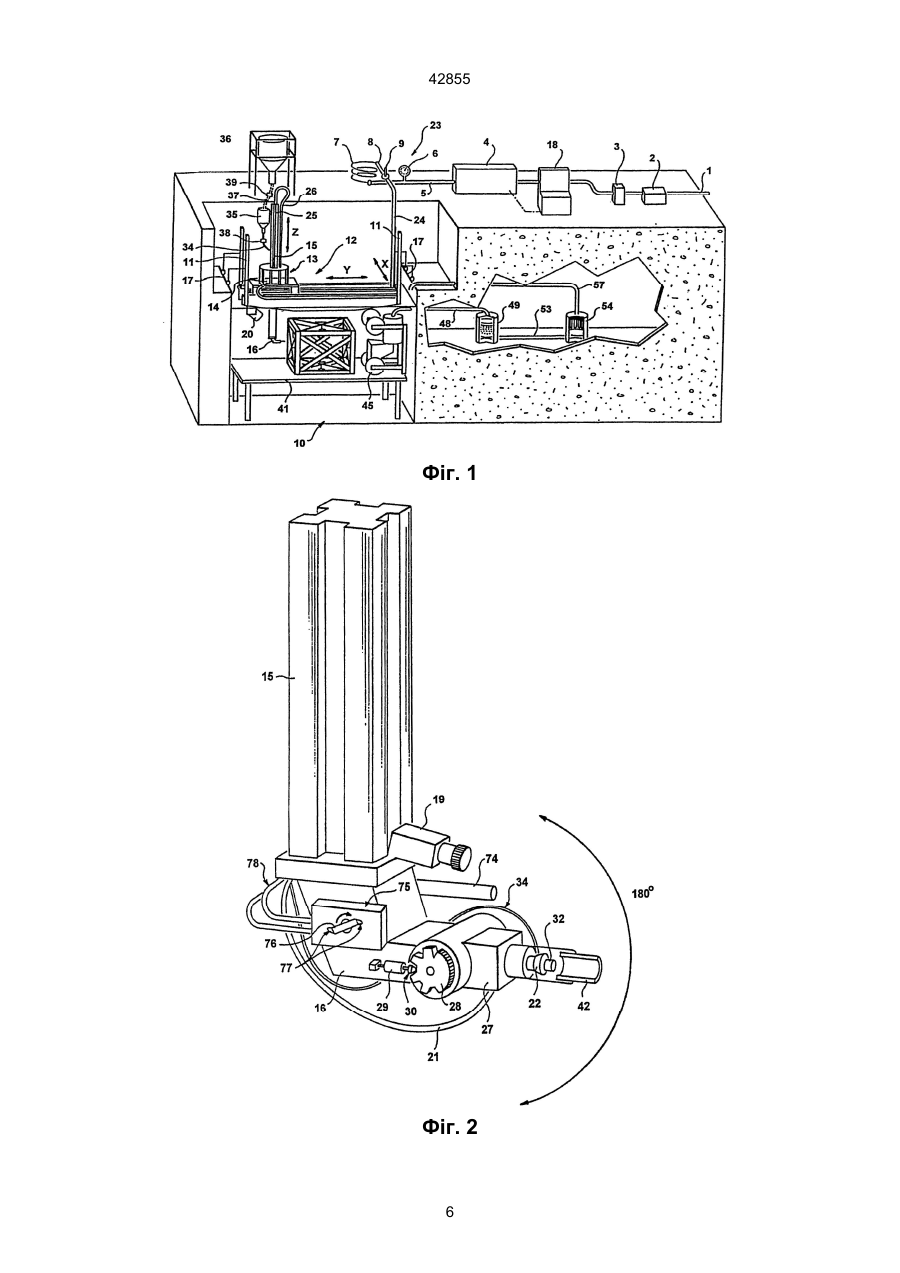
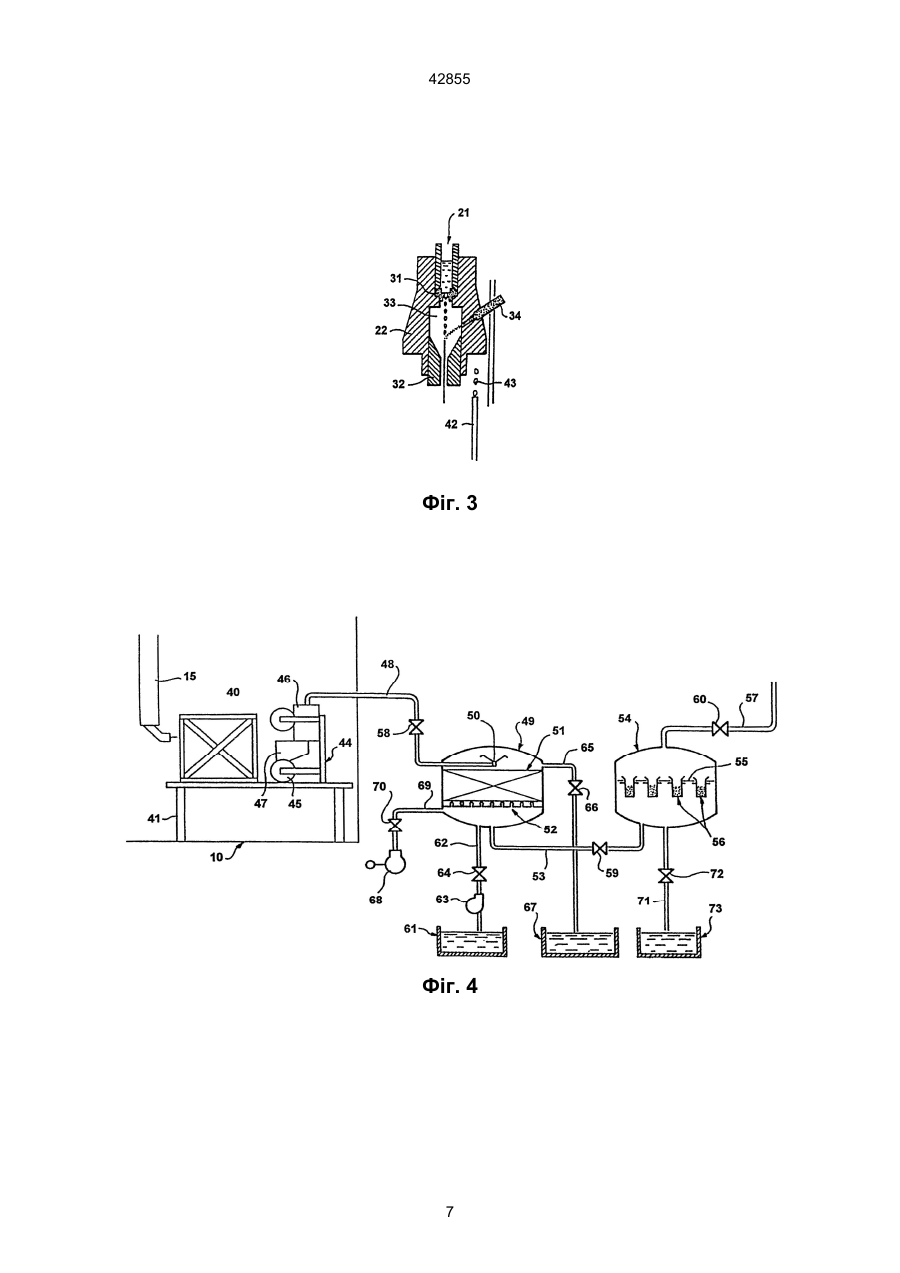
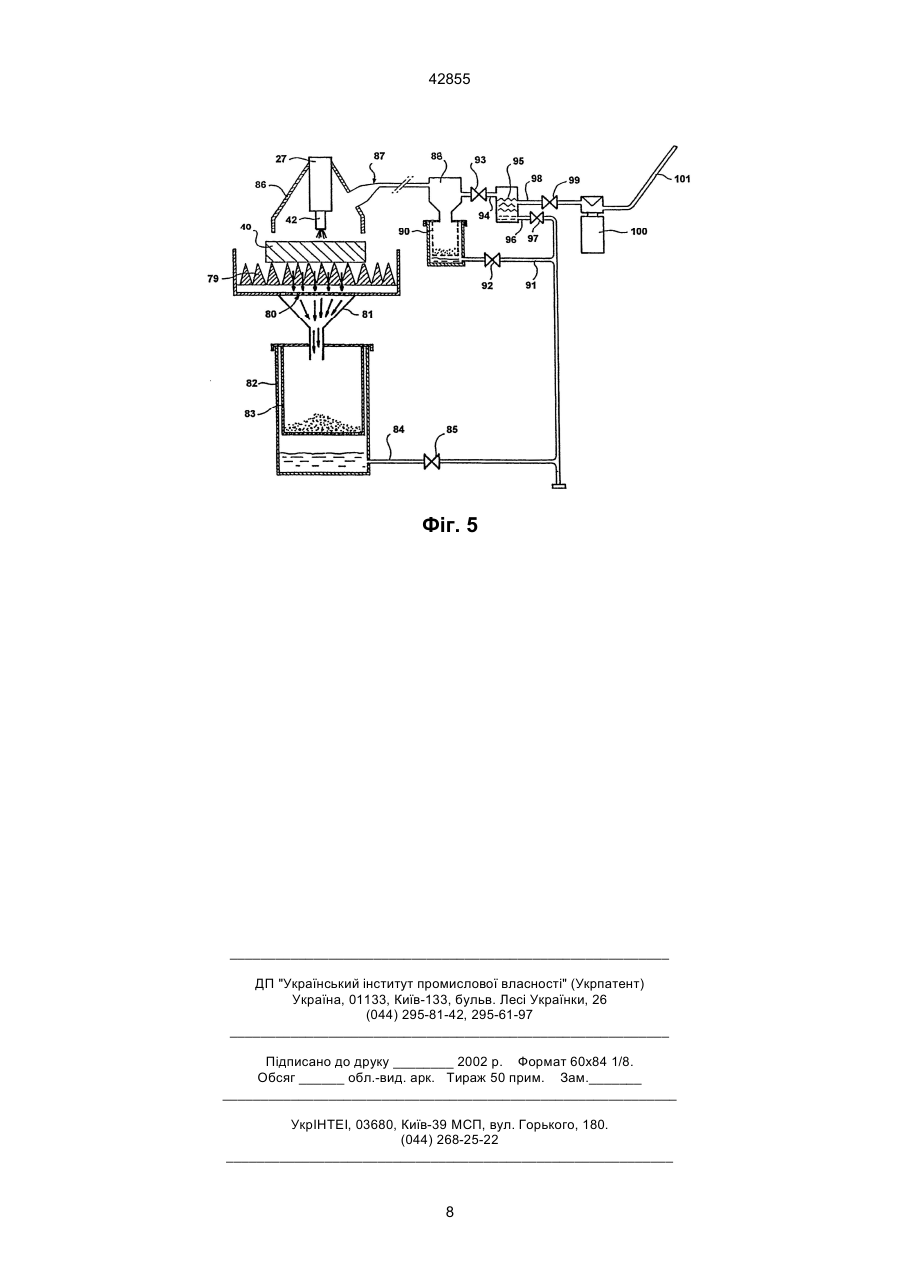
1. Пристрій для дистанційного руйнування конструкцій, який містить опору для конструкції, модуль, на якому закріплена головка різання пристрою викидання під тиском води й абразивних часток, який відрізняється тим, що модуль виконаний рухливим щодо конструкції й орієнтованим у просторі, при цьому на ньому закріплені датчик відстані до конструкції, дозиметр і пристрій дезактивації. 2. Пристрій за п.1, який відрізняється тим, що модуль занурений в рідину для руйнування зануреної в рідину конструкції. 3. Пристрій за будь-яким з пп. 1 або 2, який відрізняється тим, що він додатково містить, щонай C2 (54) ПРИСТРІЙ ДЛЯ ДИСТАНЦІЙНОГО РУЙНУВАННЯ КОНСТРУКЦІЙ 42855 Однак, зазначений спосіб характеризуються не цілком задовільними можливостями різання, особливо внаслідок обмежень, які накладаються на переміщення сопла, що створює струмінь ріжучого абразивного текучого середовища. Пристрої подібного типу здійснюють руйнування конструкції тільки певної форми. Крім того, дуже суттєвим недоліком таких пристроїв є та обставина, що шматки конструкції, які утворюються після розрізування, іноді буває важко розподілити в контейнерах належним чином, оскільки деякі шматки в ряді випадків мають підвищену радіоактивність. У цьому випадку єдиний вихід полягає в тому, щоб направляти такі шматки у спеціальні пристрої для їхнього наступного збереження, якщо це дозволено, що коштує значно дорожче. Крім цього, недолік відомого пристрою полягає в обмеженості його можливостей, що виражена в неспроможності виділення конкретної форми (контуру) різання зараженої конструкції та одночасного поєднання цієї операції з процесом дезактивації, в результаті чого до об'єктів поховання попадають конструкції, малоушкоджені радіацією, або, навпаки, такі, що потребують окремого поховання по причині високого вмісту радіоактивних елементів. Відсутність інформації про місцезнаходження найбільш уражених радіацією ділянок конструкції призводить до надмірних витрат дезактивуючих засобів, бо в цьому випадку дезактивації підлягає вся конструкція. Недоліком винаходу є також відсутність в його складі вимірювача відстані до об'єкту, який демонтується, що негативно впливає на точність проведення дозиметричних вимірів. В основу винаходу поставлена задача забезпечення високої маневреності, локалізації застосування та підвищення експлуатаційних можливостей пристрою для дистанційного руйнування конструкцій шляхом виконання його рухливим і просторово орієнтованим відносно конструкції, що підлягає демонтуванню, та поєднання в одному модулі датчика відстані, дозиметра і пристрою дезактивації, що забезпечує можливість розпізнавання положення і форми конструкції з будь-якого її боку, дозволяє визначати одночасно конфігурацію та ступінь забрудненості окремих ділянок конструкції і чітко виділяти траєкторію різання та площу дезактивації, і тим самим знизити витрати дезактивуючих речовин. Поставлена задача досягається завдяки тому, що в пристрої для дистанційного руйнування конструкцій, який містить опору для конструкції, модуль, на якому закріплена голівка різання пристрою викидання під тиском води й абразивних часток, згідно винаходу, модуль виконаний рухливим щодо конструкції й орієнтованим у просторі, і на ньому закріплені датчик відстані до конструкції, дозиметр і пристрій дезактивації, причому модуль може бути занурений в рідину для руйнування зануреної в рідину конструкції. Пристрій додатково містить, щонайменше, одну відеокамеру спостереження за конструкцією, причому відеокамера розташована з можливістю спостереження рухливого модуля. У запропонованому пристрої датчик відстані до конструкції виконаний у вигляді щупа, розташованого коаксіально з голівкою різання, пристрій дезактивації виконаний у вигляді вертушки вики дання струменю води під тиском, а модуль закріплений з можливістю переміщення навколо всієї конструкції і орієнтування в будь-якому напрямку. Крім цього, пристрій додатково містить пристрій збору абразивних часток і дрібних відходів різання, який містить фільтри, засіб видалення осаду з фільтрів шляхом їхнього промивання, та пристрій розтинання струменю. Винахід має можливість гарантувати задовільне функціонування запропонованого пристрою при належній якості розрізування конструкцій. При цьому можна включити до складу запропонованого пристрою крім телевізійних або інших камер спостереження на відстані механічний щуп або інший детектор, щоб розпізнати положення конструкції, що розрізається, у просторі або її геометричну форму, а також відрегулювати відповідним чином траєкторію переміщення ріжучого інструменту навіть у тому випадку, коли можна мати у своєму розпорядженні деяку вихідну інформацію про це положення, одержувану за допомогою плану розташування відповідної конструкції або іншого засобу. При використанні запропонованого винаходу забезпечується можливість збору залишків і відходів різання, і виключається їхнє розсіювання навколо пристрою. Особливості й переваги запропонованого винаходу будуть краще зрозумілі з приведеного нижче опису різних елементів і аспектів використання з посиланнями на супровідні креслення, на яких: фіг. 1 зображує схематично загальний вид пристрою відповідно до запропонованого винаходу; фіг. 2 зображує схематично загальний вид голівки різання відповідно до винаходу; фіг. 3 зображує схематично розріз сопла викиду струменю абразивного текучого середовища відповідно до винаходу; фіг. 4 зображує схему пристрою збору відходів різання відповідно до винаходу; фіг. 5 зображує схему другого варіанта реалізації пристрою відповідно до запропонованого винаходу. Нижче докладно описаний перший варіант реалізації пристрою відповідно до запропонованого винаходу. Демінералізована вода, використовувана в якості засобу різання, надходить в пристрій з розподільної мережі підприємства по трубопроводі 1 (фіг. 1), у якому встановлений нагнітальний насос 2. Слідом за насосом розташована батарея фільтрів 3 і підсилювач тиску 4, що доводить тиск води до 4000 бар. Канал високого тиску після підсилювача 4 послідовно містить колектор 5, у якому встановлений манометр 6 контролю тиску води, і повертальне з'єднання 7, а потім трубопровід 8, оснащений клапаном 9. Повертальне з'єднання 7 забезпечує можливість переміщення трубопроводу 8 стосовно колектора 5. Трубопровід 8, один кінець якого відчиняється в атмосферу, занурюється потім у порожнину, дно якої утворює басейн 10, де здійснюється різання. У поданому на фіг. 1 варіанті реалізації запропонованого винаходу басейн 10 заповнюється водою для підвищення безпеки розрізування радіоактивних конструкцій. Однак, заповнення цього басейну водою не є необхідним у тому випадку, коли приймаються які-небудь інші запобіжні заходи для за 2 42855 хисту навколишнього середовища від радіоактивного зараження. Пристрій відповідно до запропонованого винаходу для забезпечення можливості функціонування поза навколишнім водяним середовищем описаний нижче. На стінках порожнини встановлені дві пари вертикальних підтримуючих стійок 11, між якими перекинутий горизонтальний місток 12. Візок або каретка 13 має можливість переміщуватися уздовж містка 12, верхня поверхня якого утворює направляючі, витягнуті в напрямку, позначеному позицією Y. Над цим візком або кареткою піднімається поворотна башточка 14, призначена для кріплення вертикальної телескопічної стійки 15, що проходить через поворотну башточку. Поворотна башточка 14 дозволяє телескопічній стійці 15 ковзати уздовж вертикальної осі Z і повертатися навколо цієї осі на 360°, тобто на повний оберт. Телескопічна стійка 15 проходить під місток 12 і завершується кронштейном 16, зануреним у воду, що заповнює, як уже було сказано вище, басейн 10. Вертикальні стійки закріплені з можливістю переміщення в напрямку X, який перпендикулярний напрямку Y, ковзаючи по направляючих рейках 17, закріплених на стінках порожнини. Для забезпечення різних переміщень використовують звичайні відомі механізми, що містять приводи, шестерні, зубчасті рейки, а також опорні ролики й башмаки ковзання, що не показані докладно на кресленнях. Однак, усі приводи, як і інші частини пристрою, керуються погодженим чином від центрального блока керування 18, розташованого над порожниною, що регулюється оператором. На нижньому кінці телескопічної стійки 15 (фіг. 2) закріплена відеокамера 19, орієнтована в похилому напрямку убік зони різання і розміщена точно над кронштейном 16. Інша відеокамера 20 (фіг. 1) підвішена на містку 12 за кронштейном 16 і також спрямована убік зони різання для спостереження в більш загальному плані процесу різання. Гнучкий трубопровід 21 (фіг. 2) високого тиску розташовується уздовж телескопічної стійки 15 і проходить із боку кронштейну 16 аж до сопла 22 викиду струменю абразивного текучого середовища на кінці цього кронштейну. Гнучкий трубопровід 21 являє собою кінець каналу високого тиску 23. Трубопровід 8, власне кажучи, складається з двох жорстких ділянок 24 і 25, жорстко зв'язаних відповідно з містком і з телескопічною стійкою 15. Ці дві жорсткі ділянки, зв'язані між собою другим поворотним з'єднанням 26, що, як і гнучке поворотне з'єднання 7, являє собою гнучку ділянку трубопроводу високого тиску, здатну деформуватися відповідним чином, забезпечуючи можливість необхідних переміщень пристрою. Перша жорстка ділянка 24 трубопроводу завершується першим гнучким поворотним з'єднанням 7, а друга жорстка ділянка трубопроводу завершується гнучким трубопроводом 21. Гнучкість трубопроводу 21 дозволяє нахиляти голівку різання 27, що розташовується на кінці кронштейну 16, з яким голівка різання зв'язана за допомогою шарнірного з'єднання, оснащеного приводом, розміщеним в герметичному корпусі, і розміщеним зовні зубчастим сектором 28, що повертається разом із голівкою різання 27. В западини зубчастого сектора за допомогою гідра влічного силового циліндра 29, жорстко зв'язаного з кронштейном 16, уводиться стопорний палець 30. Таким чином, сопло 22 викиду струменю абразивного текучого середовища може бути встановлене з необхідним нахилом під дією приводу і зафіксовано в необхідному положенні шляхом уведення стопорного пальця 30 у відповідну западину зубчастого сектора. Ця можливість повороту голівки різання 27 навколо горизонтальної осі на 180° або на половину оберту між двома вертикальними положеннями поєднується з можливістю повороту телескопічної стійки 15 на повний оберт і дозволяє соплу 22 викиду струменю абразивного текучого середовища мати будь-яку просторову орієнтацію. Гнучкий трубопровід 21 (фіг. 3) закінчується в соплі 22 і перед соплом нагнітання 31, виготовленим із сапфіра або кераміки, що приблизно формує поперечний перетин струменю води, що виходить із нього. Спрямівний струмінь 32 установлений на виході сопла 22 і відділений від сопла нагнітання 31 камерою 33. При цьому вона утримує краплі води. У камеру 33 виходить похило стосовно осі струменю води канал подачі піску, який у цьому місці змішується зі струменем води, що набуває абразивних властивостей на виході із сопла 22. Інша частина контуру подачі піску містить канал 34 (фіг. 1), який являє собою вихідний канал невеликого живильного бункера 35, що розташовується над цим вихідним каналом і утримується на вершині телескопічної стійки 15. Бункер 35 має відносно невеликі розміри, його ємність становить декілька літрів, і призначений для забезпечення рівномірності подачі піску, що надходить в малий бункер із великого бункера 36, який розташовується над порожниною, по каналу 37 великого поперечного перетину. Канали 34 і 37 подачі піску оснащені автоматизованими клапанами 38 і 39, що можуть відчинятися й закриватися по командах, які надходять із блоку керування 18. Струмінь води і піску під тиском направляється на підлягаючу розрізуванню конструкцію 40, попередньо розміщену на опорі 41, що встановлена на дні басейну 10. Важливим і цікавим елементом запропонованого винаходу є індукційний щуп, який завершується трубкою 42, частина якої являє собою постійний магніт і проходить на кінці голівки різання 27. Цей щуп, крізь який проходить абразивний струмінь води з піском, використовується для того, щоб розпізнати контактним способом форму й положення підлягаючої різанню конструкції 40, яке, зрозуміло, заздалегідь невідомо. Трубка 42 просувається вперед у напрямку до конструкції 40 аж до торкання з нею в одній або в декількох точках для повідомлення положення конструкції у блок керування 18 пристрою. Для цього використовують усі можливі переміщення голівки різання 27, здійснювані за допомогою механізмів, що зв'язують голівку різання з нерухомими частинами пристрою. Робочий хід по кожному з трьох взаємно перпендикулярних напрямків X, Y і Z становить, звичайно, декілька метрів для того, щоб сопло 22 мало можливість зробити повний оберт навколо підлягаючій розрізуванню конструкції 40. Такі виміри щупом здійснюються на всіх поверхнях конструк 3 42855 ції 40, оскільки голівка різання 27 може бути орієнтованим у будь-якому напрямку. Механічний контакт із конструкцією 40 виявляється магнітним датчиком, закріпленим на соплі 22 і чутливим до переміщення трубки 42, яка у противному випадку утримується у максимально висунутому положенні за допомогою поворотної пружини 43, що розташовується за трубкою й упирається у голівку різання 27 навколо сопла 22. Абразивний струмінь води з піском викидається в напрямку конструкції 40 по траєкторії, обумовленій оператором. Траєкторія абразивного струменю враховує площини конструкції 40, що спостерігаються відеокамерами 19 і 20, а також інформацію, що видається індукційним щупом. Відомо, щострумінь рідини під досить великим тиском досить легко ріже деякі матеріали. Такий струмінь може різати навіть дуже тверді матеріали досить великої товщини і будь-якої природи, якщо в цей струмінь рідини додати ті або інші абразивні частки. Корисно, однак, збирати ці частки після їхнього використання, а також збирати відходи різання, як про це уже було сказано вище. Для збору таких часток використовують спеціальний пристрій, розташований за конструкцією 40 (фіг. 4) стосовно сопла 22 у напрямку викидання струменю води. Цей пристрій збору часток містить опорну раму 44 із колесами 45, що служать направляючими для конструкції 40, коли вона опускається, і насос 46, що обладнаний на усмоктувальному кінці збірним розтрубом 47, який відчиняється в напрямку конструкції 40, що розрізується, і ріжучого струменю. У процесі функціонування пристрою вода, пісок і частки відходів різання засмоктуються насосом 46 у розтруб 47 і відводяться з басейну 10 за допомогою петлеподібного трубопроводу, що направляє воду назад у басейн 10 після її очищення й фільтрації. Петлеподібний трубопровід містить вхідну ділянку 48, яка завершується в пісковому фільтрі 49 у його вершині розпилювачем 50, що розсіює воду і її вміст на піщаний шар 51, на розподільній сітці 52. Вода, з якої відділені найбільш великі частки, затримані сіткою 52 і пісчаним шаром 51, стікає на дно піскового фільтра 49 і подається у проміжну ділянку 53 петлеподібного трубопроводу, по якому доходить до донної частини фільтра 54 зі свічами. Потім вода піднімається нагору, проходячи через фільтрувальну сітку 55, оснащену отворами, у яких розміщені пористі патрони циліндричної форми, заповнені подрібненою смолою, і утворюючі фільтрувальні свічі 56. Через отвори вода проходить через фільтрувальну сітку 55 у тих місцях, де установлені фільтрувальні свічі 56. Проходячи через ці фільтрувальні свічі, вода звільняється від останніх забруднюючих її часток у подрібненій смолі. Після цього вода надходить у вихідну ділянку 57 петлеподібного трубопроводу і повертається в басейн 10 (не показане). Однак, фільтри 49 і 54 необхідно періодично очищати від включень, що можуть привести до закупорювання. Для цього фільтри ізолюють від іншої частини петлеподібного трубопроводу, закриваючи клапани 58, 59 і 60, установлені відповідно на ділянках 48, 53 і 57. Пісковий фільтр 49 очищується шляхом промивання водою, що надходить із резервуара 61 і піднімається по трубопроводі промивання, 62, який відчиняється в донній частині фільтра. Промивна вода піднімається до фільтра під дією нагнітального насосу 63 після відкриття клапану 64 і проходить через пісчаний шар 54 у напрямку знизу нагору, після чого надходить у зливальний трубопровід 65, що починається у верхній частині фільтра 49 при відкритому клапані 66. Відфільтровані включення захоплюються потоком промивної води у відстійник 67, що розташований на протилежному кінці зливального трубопроводу 65. Ефективність промивання піскового фільтра може бути підвищена за допомогою контуру наддуву 68, який зв'язаний з донною частиною фільтра 49 і створює в його донній частині надлишковий тиск повітря за допомогою повітряного трубопроводу 69, що в інший час перекритий спеціальним клапаном 70. Згаданий резервуар 64, трубопровід 62, насос 63, зливальний трубопровід 65 та контур наддуву 68 разом з трубопроводом 69 виступають як засіб видалення осаду з фільтрів, що очищує останні шляхом промивання. Фільтрувальні свічі 56 підвішені на фільтрувальній сітці 55 за допомогою зв'язків відносно невеликої міцності, але можуть бути видалені разом із затриманими цими фільтрами забрудненнями шляхом їхнього втягування або усмоктування іншим зливальним трубопроводом 71, перекриваючий клапан 72 якого в цьому випадку повинний бути відкритий. Рідина, що знаходиться у фільтрі 54 поверх свіч, виштовхує їх і змушує падати через цей трубопровід 71 в інший бак відстійника 73. Потім на місце старих установлюються нові фільтрувальні свічі 56. Дозиметр 74 (фіг. 2) спрямований убік конструкції 40 і вимірює рівень її радіоактивного зараження. У результаті такого виміру можна пустити в хід пристрій дезактивації 75, активний елемент якого являє собою вертушку 76, утворену трубкою, що закінчується на протилежних кінцях двома похилими соплами 77, орієнтованими у протилежних напрямках, щоб витрата води, що надходить через відгалуження 78 від гнучкого трубопроводу 21 і проходить усередині вертушки 76, створювала крутильний момент, прикладений до вертушки. Крутильний момент змушує вертушку обертатися на підставі пристрою дезактивації 75, при цьому з двох боків вертушки під великим тиском викидається обертовий струмінь води. Пристрій дезактивації розташовується таким чином, щоб струмінь води ніколи не перетинався з елементами телескопічної стійки 15, кронштейну 16 або голівки різання 27. Струм проходить у площині збоку від кронштейну 16 і голівки різання 27 і вдаряється в підлягаючу різанню конструкцію 40 на частині свого кутового ходу, що дозволяє частково очистити конструкцію від налиплих на неї радіоактивних матеріалів. У кращому варіанті реалізації пристрій дезактивації 75 встановлений у передній частині пристрою і може бути розміщений поруч із соплом 22. Крім того, дозиметр 74 установлений якнайближче до конструкції 40. Найкраще можливе розташування має сопло 22, охоплене дозиметром 74 і пристроєм дезактивації 75 із двох боків, причому сопло 22 злегка висунуто вперед стосовно цих елементів. 4 42855 Після розпізнавання форми й положення конструкції 40 за допомогою щупа індукційного типу й підготовки траєкторії різання або навіть у процесі цього розпізнавання форми при допомозі створення плану різання, за яким може йти етап коректування цього плану на основі результатів розпізнавання форми й визначення просторового положення конструкції, здійснюють вимір ступеню радіоактивного зараження конструкції 40 за допомогою дозиметра 74. Якщо за результатами цих вимірів приймається рішення про необхідність дезактивації конструкції, дезактивація здійснюється перед початком різання і полягає у запуску або приведенні в дію вертушки 76 перед занадто сильно забрудненими радіоактивними речовинами ділянками конструкції 40. Дезактивація здійснюється аж до того моменту, коли дозиметр 74 виявить, що ступінь радіоактивного забруднення знизилася до деякого прийнятного рівня. Можна також робити дезактивацію всієї конструкції, після якої здійснюють нові виміри. За результатами цих повторних вимірів ділянки конструкції, що опинилися недезактивованими в достатньому ступені, піддаються повторному впливу потужного струменю води від пристрою дезактивації 75. Тільки після цього продовжується різання конструкції 40. Коли той або інший шматок конструкції 40 виявляється відділеним, він зачіпається стопором, піднімається нагору і витягається з басейну 10, після чого міститься в контейнер збереження за допомогою мостового крана або іншого пристрою подібного типу. Таким чином, об'єднання пристрою дезактивації 75, дозиметра 74 і сопла 22 на тому самому рухливому кронштейні дозволяє швидко, надійно й селективне робити дезактивацію підлягаючої розрізуванню конструкції, що більш важко зробити за допомогою тільки одного пристрою дезактивації, який буде функціонувати значно більш тривалий час для більшої надійності при відсутності дозиметра для виміру початкового ступеню радіоактивного забруднення, а потім і ступеню його зменшення, і при відсутності датчика, що дозволяє бути упевненим у надійній дезактивації. Запропонований винахід дозволяє не вирізати з конструкції шматків, ступінь радіоактивного забруднення яких буде перевищувати деякий заданий розмір і наступна обробка яких унаслідок цього буде проблематичною. На фіг. 5 показане використання запропонованого винаходу для різання радіоактивних конструкцій, не вміщених у водяне середовище дезактиваційного басейну. Деякі з елементів пристрою відповідно до запропонованого варіанта залишаються без змін, зокрема, голівка різання 27, трубка 42 індукційного щупа й елементи, що забезпечують створення абразивного струменю текучого середовища й просторові переміщення голівки різання 27. У цьому варіанті реалізації підлягаюча різанню конструкція 40 установлюється на пристрій розтинання струменю 79 у формі піддона, днище якого покрито шипами пірамідальної форми, об які розбивається струмінь води, утрачаючи при цьому свою енергію. Вода стікає між шипами на дно піддону і проходить через сітку попереднього фільтрування 80, що затримує найбільш великі частки включень. Потім вода потрапляє у лійку 81, а з неї у фільтр 82, здатний затримати тверді частки з діаметром від 5 до 100 мкм, що залишаються у фільтрувальній чаші 83, підвішеній над дном фільтра 82 і утворюючий активний елемент фільтра. Відфільтрована й очищена вода виходить із фільтрувальної чаші 83, стікає на дно фільтра 82 і витікає потім через трубопровід 84, який може бути перекритий за допомогою клапана 85 і який завершується зливальною установкою. Періодичне відкриття клапанна 85 дозволяє звільняти фільтр 82 від рідини, що зібралася в ньому. Іншим важливим елементом, який бувмодернізований у цьому варіанті пристрою відповідно до запропонованого винаходу, є пристрій збору відходів різання за допомогою усмоктування, що закінчується дзвоном 86, який охоплює голівку різання 27 таким чином, щоб перекрити частину конструкції 40. Розтруб 87 відчиняється у внутрішній об'єм, охоплений дзвоном 86, і дозволяє відсмоктати з нього аерозолі, що утворюються у процесі різання. Інший кінець розтруба зв'язаний з відцентровим фільтром 88, оснащеним внутрішнім фільтрувальним мішком 90, що дозволяє зібрати частки піску й відходи різання. Вода, яка витікає з фільтрувального мішка 90, періодично витікає з відцентрового фільтра 88 через трубопровід 91, що веде у вузол зливу, за умови відкриття клапана перекриття 92. У момент зливу води з відцентрового фільтра 88 перекривають клапан 93, що розташовується у трубопроводі усмоктування 94, у верхній частині відцентрового фільтра 88. Через трубопровід ще вологе повітря покидає відцентровий фільтр і потрапляє в сепаратор 95 відділення вологи з повітря. У донній частині сепаратора є трубопровід 96, зв'язаний з установкою зливу, трубопровід 96 може бути перекритий за допомогою клапана 97. На виході сепаратора 95 сухе повітря проходить через трубопровід 98, оснащений клапаном 99, призначеним для перекриття в разі потреби, і потрапляє в усмоктувальний вентилятор 100, після чого віддалюється у вихідний трубопровід 101. Пристрій може цілком обробити частини ядерних реакторів, включаючи частини, які є найбільш товстими і мають найбільш складну форму. Розрізуванню за допомогою такого пристрою можуть бути піддані метали, кераміка й скло. 5 42855 Фіг. 1 Фіг. 2 6 42855 Фіг. 3 Фіг. 4 7 42855 Фіг. 5 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 8
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for the structures remote destruction
Автори англійськоюBoden Francois, Lebiese Georges, Vivier Franc, Martin Ludovik
Назва патенту російськоюУстройство для дистанционного разрушения конструкций
Автори російськоюБоден Франсуа, Лебьез Жорж, Вивье Франк, Мартен Людовик
МПК / Мітки
Мітки: дистанційного, руйнування, пристрій, конструкцій
Код посилання
<a href="https://ua.patents.su/8-42855-pristrijj-dlya-distancijjnogo-rujjnuvannya-konstrukcijj.html" target="_blank" rel="follow" title="База патентів України">Пристрій для дистанційного руйнування конструкцій</a>
Пристрій для руйнування льодяних пробок

Номер патенту: 36272
Опубліковано: 16.04.2001
Автори: Сухарєв Єдуард Олександрович, Скоблюк Михайло Петрович, Клімов Сергій Васильович
МПК: E21B 7/14
Мітки: льодяних, руйнування, пристрій, пробок
Формула / Реферат:
1. Пристрій для руйнування льодяних пробок, який містить джерело живлення, теплообмінник з генератором тепла і регулюючою апаратурою, гнучкий шланг і робочий інструмент, який містить рукоятку, трубопровід в теплоізолюючій обмотці і насадок, що містить корпус, сопло встановлене під кутом відносно повздовжньої вісі корпусу з можливістю обертання, бічні канали та клапан з пружиною, який відрізняється тим, що сопло виконане у вигляді конфузора з...
Пристрій термоабразивного руйнування мінеральних середовищ
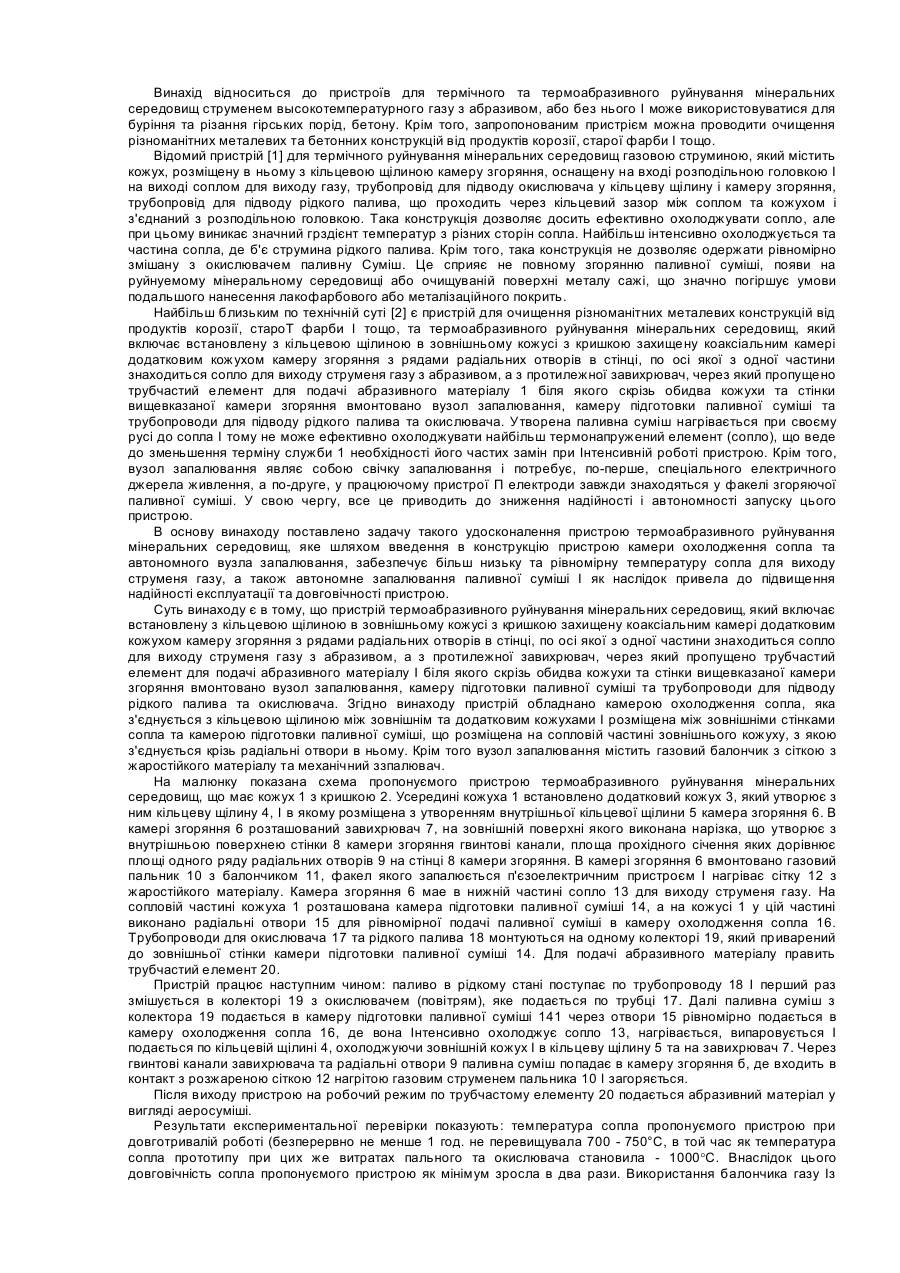
Номер патенту: 7186
Опубліковано: 30.06.1995
Автори: Лавришин Богдан Миколайович, Олійник Тарас Йосипович, Похмурський Василь Іванович, Демид Михайло Петрович, Фенчин Святослав Володимирович, Студент Михайло Михайлович
МПК: E21C 37/16, E21B 7/14
Мітки: руйнування, мінеральних, середовищ, пристрій, термоабразивного
Формула / Реферат:
Пристрій для термоабразивного руйнування мінеральних середовищ, який вміщує зовнішній кожух з кришкою, коаксіальне встановлені в ньому із кільцевими щілинами між собою додатковий кожух і камеру згоряння, на одному кінці по осі якої знаходиться сопло для виходу струменя газу з абразивом, а також встановлена камера підготовки паливної суміші та трубопроводи для підводу рідкого палива та окислювача, а на протилежному - завих-рювач з вмонтованим...
Спосіб термічного руйнування гірських порід, та пристрій для його здійснення

Номер патенту: 37563
Опубліковано: 15.05.2001
Автори: Вілкул Юрій Григорович, Іцхакін Владлен Давидович, Бизов Володимир Федорович, Сорокопуд Андрій Вадимович, Дімарецький Микола Петрович
МПК: E21B 7/14
Мітки: руйнування, пристрій, порід, спосіб, термічного, гірських, здійснення
Формула / Реферат:
1. Спосіб термічного руйнування гірських порід, включає подачу пального і повітря в камеру спалення, подачу води для охолодження цієї камери та пилоподавлення, спалення паливної суміші та подачу продуктів спалення з надзвуковою швидкістю на забій, який відрізняється тим, що воду попередньо розділяють на два окремих потоки, частину, що призначена для охолодження камери спалення, після цього направляють у надзвуковий струмень камери спалення,...
Пристрій для руйнування мінеральних середовищ струєю високотемпературного газу
Номер патенту: 32858
Опубліковано: 15.02.2001
Автори: Жуков Сергій Олександрович, Коверниченко Леонід Миколайович
МПК: E21C 37/16, E21B 7/14
Мітки: струєю, середовищ, мінеральних, газу, руйнування, пристрій, високотемпературного
Текст:
...тільки з прототипом, а і з іншими технічними рішеннями в даній області, не дало можливості виявити в них ознак, які б відрізняли заявляєме рішення від прототипу, що дає змогу зробити заключения про відповідність критерію "суттєві відзнаки". Пристрій складається з кожуху (1), на якому розташовані патрубки подачі повітря (2) і пального (3). В верхній частині кожуху (1) розміщена катушка (4) до якої закріплено завихрювач (5). Завихрювач (5)...
Пристрій для руйнування конкрементів
Номер патенту: 34976
Опубліковано: 15.03.2001
Автори: Атможитов Сергій Борисович, Возіанов Сергій Олександрович, Гайсенюк Федір Зіновійович, Дзюрак Валерій Семенович
МПК: A61N 7/00, A61B 17/225, A61B 8/00
Мітки: пристрій, руйнування, конкрементів
Формула / Реферат:
Пристрій для руйнування конкрементів, що включає заповнений рідиною корпус та розміщену в ньому камеру, який відрізняється тим, що пристрій додатково має панель з отвором під пробку та з'єднане з нею гвинтами металеве кільце з прокладкою і зовнішнім пазом, до якого стяжною смужкою прикріплений еластичний корпус, окрім того у кільце вмонтований кран, еластична зйомна камера з'єднана з панеллю за допомогою пробки з різьбою та наскрізним...
Попередній патент: Спосіб одержання лікарського засобу седативної та рефлекторної судинорозширювальної дії
Наступний патент: Спосіб виготовлення електрохімічного або гальванічного елемента
Випадковий патент: Спосіб збудження ударних вібраційних коливань