Спосіб та пристрій для пошуку базоbих станцій для зв’язку з віддаленою станцією
Формула / Реферат
1. Спосіб вибору базової станції для зв'язку з віддаленою станцією, який передбачає:
- вимірювання протягом зумовленого часу у зазначеній віддаленій станції енергій сигналів від базових станцій, здатних підтримувати зв'язок з зазначеною віддаленою станцією,
- обчислення у зазначеній віддаленій станції щонайменше одного динамічного порогового значення з використанням більш ніж однієї зазначеної енергії сигналу,
- порівняння у зазначеній віддаленій станції енергії сигналу від першої базової станції з зазначеним щонайменше одним динамічним порогом і
- обрання у зазначеній віддаленій станції зазначеної першої базової станції, якщо енергія сигналу від зазначеної першої базової станції перевищує щонайменше один призначений поріг з зазначених щонайменше одного динамічного порогу.
2. Спосіб за п. 1, який відрізняється тим, що зазначене щонайменше одне динамічне по-рогове значення відповідає середньому значенню зазначених енергій сигналів, пов'язаних з поточними каналами зв'язку, призначеними зазначеній віддаленій станції.
3. Спосіб за п. 1, який відрізняється тим, що зазначений призначений один з зазначених щонайменше одного динамічного порогу обчислюється виконанням лінійної операції над зазначеними енергіями сигналів від базових станцій, здатних підтримувати зв'язок з зазначеною віддаленою станцією.
4. Спосіб за п. 3, який відрізняється тим, що зазначена лінійна операція виконується згідно з лінійним співвідношенням
Y1 = SOFT_SLOPE * COMBINED_PILOT + ADD_INTERCEPT.
5. Спосіб за п. 1, який відрізняється тим, що зазначені енергії сигналів, пов'язані з поточними каналами зв'язку, призначеними зазначеній віддаленій станції, включають значення енергій пілот-сигналів.
6. Спосіб за п. 3, який відрізняється тим, що зазначена лінійна операція обчислення виконується у віддаленій станції у відповідь на відхилення зазначених енергій сигналів протягом зумовленого періоду часу.
7. Спосіб за п. 3, який відрізняється тим, що зазначена лінійна операція обчислення виконується у віддаленій станції на підставі збережених системних параметрів.
8. Спосіб за п. 3, який відрізняється тим, що обчислення зазначеної лінійної функції включає:
- множення зазначених енергій сигналів від базових станцій, здатних підтримувати зв'язок з зазначеною віддаленою станцією, на першу змінну і
- складання добутку зазначеного множення з другою змінною.
9. Спосіб за п. 1, який відрізняється тим, що додатково включає операцію видалення базової станції з Активної групи, якщо зазначені енергії сигналів, пов'язані з зазначеними призначеними поточними каналами зв'язку між зазначеними базовою і віддаленою станціями, падає нижче зазначеного призначеного щонайменше одного динамічного порогу.
10. Пристрій для обробки сигналів, який використовується для здійснення прямого зв'язку між мобільною станцією і базовою станцією і має у складі:
- більш ніж одну базову станцію,
- мобільну станцію і
- щонайменше один процесор цифрового сигналу, здатний обробляти команди цифрового сигналу: виміряти у щонайменше одній віддаленій станції енергію сигналів, прийнятих від базових станцій, здатних мати зв'язок з зазначеною віддаленою станцією, обчислювати щонайменше одне динамічне порогове значення, використовуючи більш ніж одну з зазначених енергій сигналу, порівнювати енергію сигналу від першої базової станції з зазначеним щонайменше одним динамічним порогом і обирати зазначену першу базову станцію, коли зазначена енергія сигналу від зазначеної першої базової станції перевищує щонайменше один призначений поріг з зазначених щонайменше одного динамічного порогу.
Текст
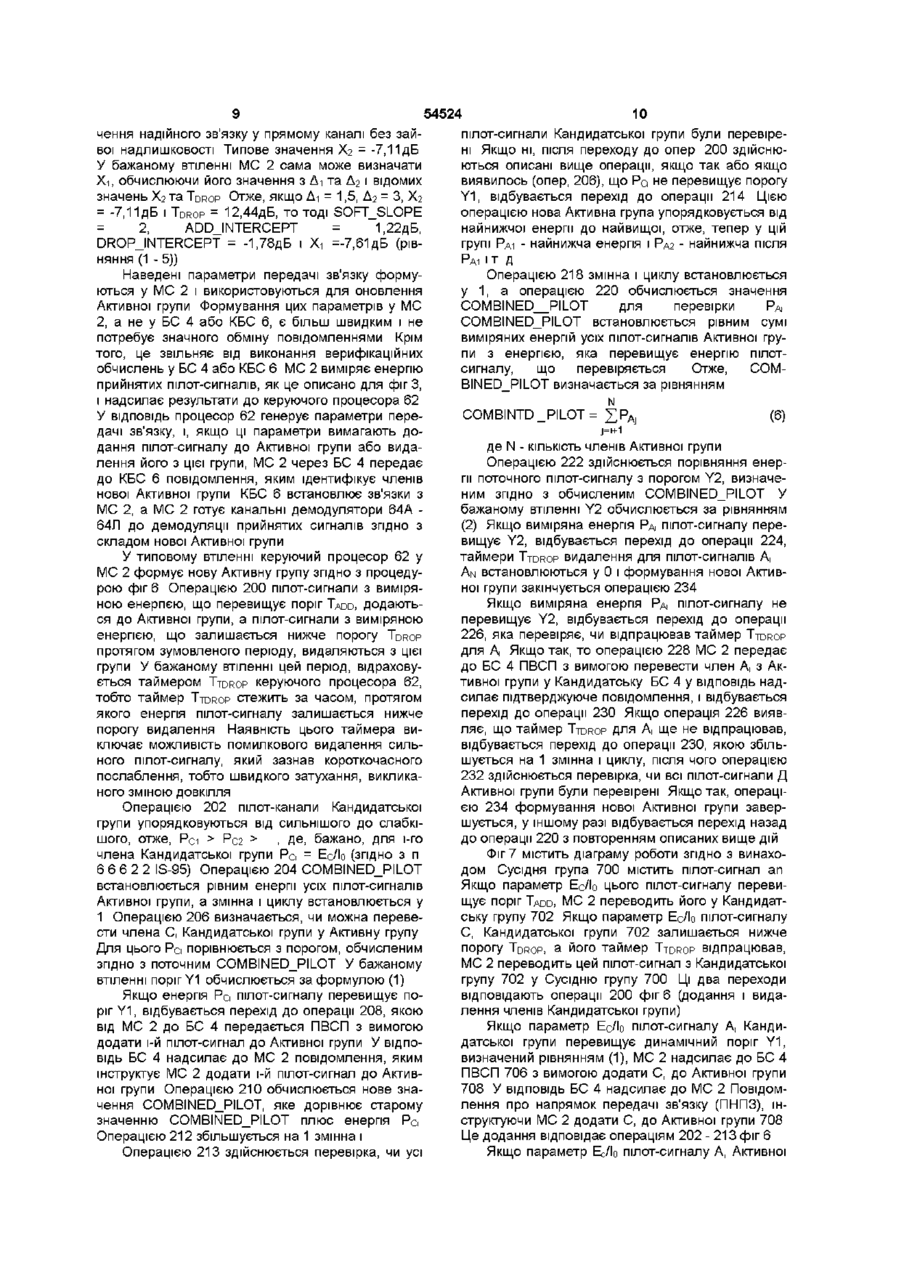
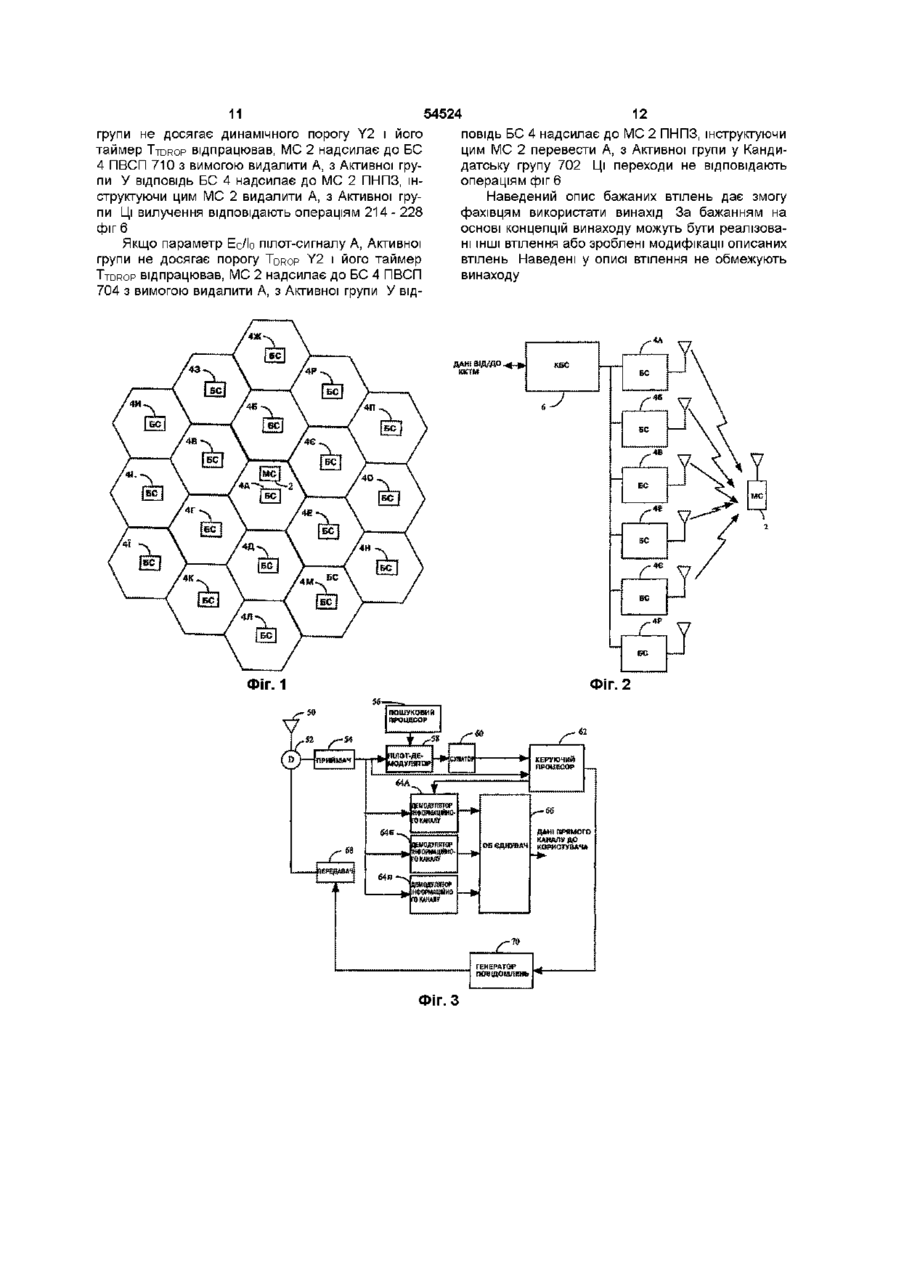
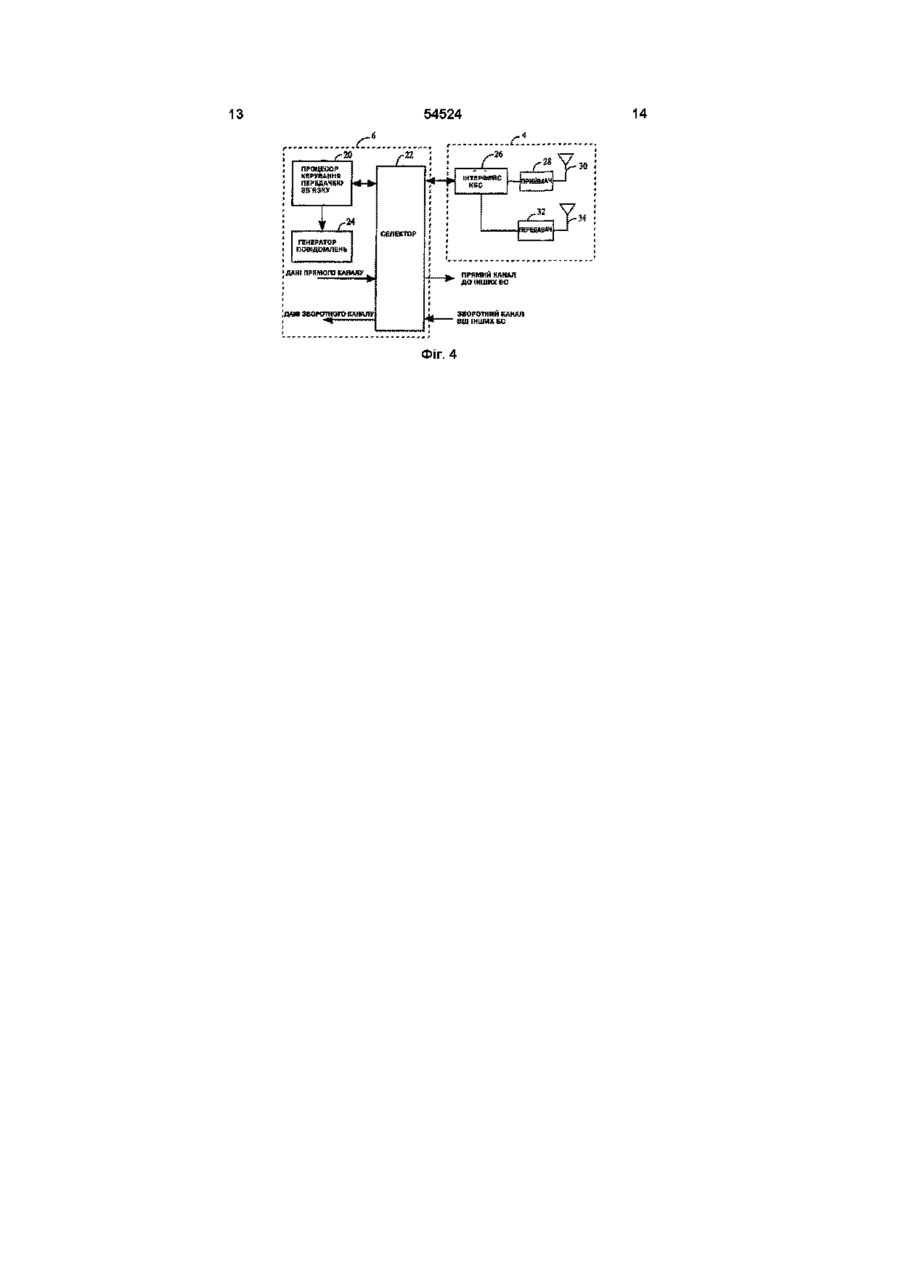
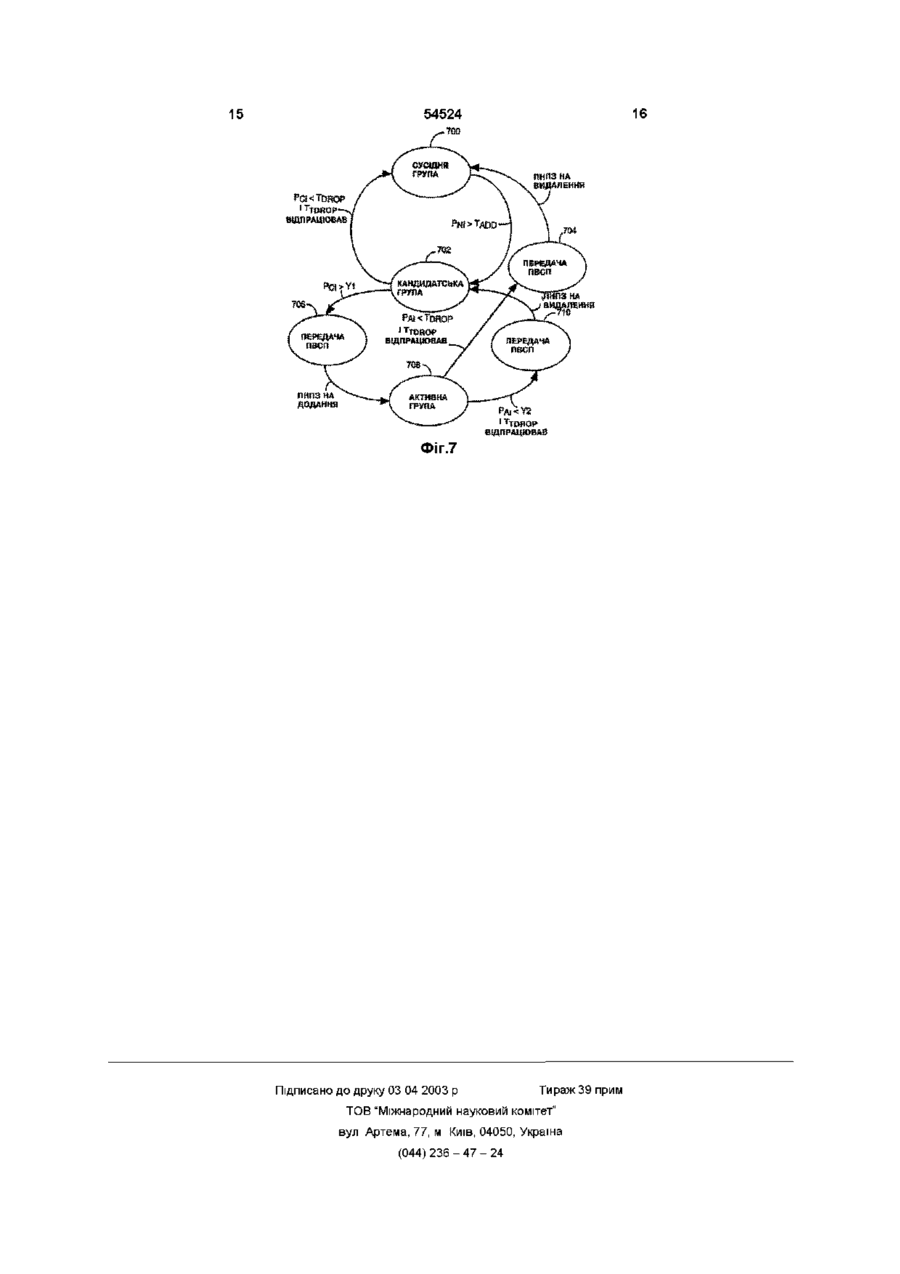
1 Спосіб вибору базової станції для зв'язку з віддаленою станцією, який передбачає - вимірювання протягом зумовленого часу у зазначеній віддаленій станції енергій сигналів від базових станцій, здатних підтримувати зв'язок з зазначеною віддаленою станцією, - обчислення у зазначеній віддаленій станції щонайменше одного динамічного порогового значення з використанням більш ніж однієї зазначеної енергії сигналу, - порівняння у зазначеній віддаленій станції енергії сигналу від першої базової станції з зазначеним щонайменше одним динамічним порогом і - обрання у зазначеній віддаленій станції зазначеної першої базової станції, якщо енергія сигналу від зазначеної першої базової станції перевищує щонайменше один призначений поріг з зазначених щонайменше одного динамічного порогу 2 Спосіб за п 1, який відрізняється тим, що зазначене щонайменше одне динамічне по-рогове значення відповідає середньому значенню зазначених енергій сигналів, пов'язаних з поточними каналами зв'язку, призначеними зазначеній віддаленій станції 3 Спосіб за п 1, який відрізняється тим, що зазначений призначений один з зазначених щонайменше одного динамічного порогу обчислюється виконанням лінійної операції над зазначеними енергіями сигналів від базових станцій, здатних підтримувати зв'язок з зазначеною віддаленою станцією Y1 = SOFT_SLOPE * COMBINED_PILOT + ADDJNTERCEPT 5 Спосіб за п 1, який відрізняється тим, що зазначені енергії сигналів, пов'язані з поточними каналами зв'язку, призначеними зазначеній віддаленій станції, включають значення енергій пілотсигналів 6 Спосіб за п 3, який відрізняється тим, що зазначена лінійна операція обчислення виконується у віддаленій станції у ВІДПОВІДЬ на відхилення зазначених енергій сигналів протягом зумовленого періоду часу 7 Спосіб за п 3, який відрізняється тим, що зазначена лінійна операція обчислення виконується у віддаленій станції на підставі збережених системних параметрів 8 Спосіб за п 3, який відрізняється тим, що обчислення зазначеної лінійної функції включає - множення зазначених енергій сигналів від базових станцій, здатних підтримувати зв'язок з зазначеною віддаленою станцією, на першу змінну і - складання добутку зазначеного множення з другою змінною 9 Спосіб за п 1, який відрізняється тим, що додатково включає операцію видалення базової станції з Активної групи, якщо зазначені енергії сигналів, пов'язані з зазначеними призначеними поточними каналами зв'язку між зазначеними базовою і віддаленою станціями, падає нижче зазначеного призначеного щонайменше одного динамічного порогу 10 Пристрій для обробки сигналів, який використовується для здійснення прямого зв'язку між мобільною станцією і базовою станцією і має у складі - більш ніж одну базову станцію, - мобільну станцію і - щонайменше один процесор цифрового сигналу, здатний обробляти команди цифрового сигналу виміряти у щонайменше одній віддаленій станції енергію сигналів, прийнятих від базових станцій, здатних мати зв'язок з зазначеною віддаленою станцією, обчислювати щонайменше одне динамічне порогове значення, використовуючи більш ніж НІЙНИМ співвідношенням О ю ю 54524 одну з зазначених енергій сигналу, порівнювати енергію сигналу від першої базової станції з зазначеним щонайменше одним динамічним порогом і обирати зазначену першу базову станцію, коли зазначена енергія сигналу від зазначеної першої базової станції перевищує щонайменше один призначений поріг з зазначених щонайменше одного динамічного порогу Винахід стосується систем зв'язку, зокрема нового удосконаленого способу і пристроя для виконання передачі зв'язку у безпровідній системі зв'язку Використання модуляції з паралельним доступом з кодовим ущільненням каналів (ПДКУ) є одним з способів здійснення зв'язку у системах з великою КІЛЬКІСТЮ користувачів ПДКУ має суттєві переваги над іншими відомими способами, наприклад, паралельним доступом з розділенням часу або частот (ПДРЧ або ПДРЧС), способами з амплітудною модуляцією, наприклад, з використанням одної бічної смуги з компандуванням Використання ПДКУ описано у патентах США 4 901 307 і 5 103 459, включених сюди посиланням ПДКУ стандартизовано стандартом TIA/EIA/IS-95 Асоціації телекомунікацій (ТІА) (Стандарт сумісності мобільних і базових станцій для стільникових систем широкого спектру подвійного режиму) У патенті США 5 267 261, включеному посиланням, описано удосконалену процедуру м'якої передачі зв'язку Це удосконалення полягає у вимірюванні у МС сили "пілот-сигналів", які передаються кожною з БС системи, що дозволяє визначити БС придатну для передачі зв'язку до неї Такі БС - кандидати на передачу до них зв'язку утворюють чотири групи Першу групу, яку називають Активною, складають БС, з якими МС має поточний зв'язок Другу групу, яку називають Кандидатською, складають БС, які, як було виявлено, мають достатню силу сигналу для прийому МС БС додаються до Кандидатської групи, якщо виміряна енергія їх пілот-сигналів перевищує зумовлений поріг TADD Третю, Сусідню групу складають БС, які знаходяться поблизу МС, але не входять у Активну або Кандидатську групи Четверту, Залишкову групу складають усі ІНШІ БС Згідно З стандартом IS-95 МС надсилає Повідомлення про виміряну силу пілот-сигналу (далі ПВСП), коли вона виявляє пілот-сигнал достатньої сили, не пов'язаний з жодним з інформаційних прямих каналів, що демодулюються у даний момент, або коли сила пілот-сигналу, пов'язаного з одним з інформаційних прямих каналів, що демодулюються у даний момент, залишається нижчою за зумовлений поріг протягом зумовленого інтервалу часу МС надсилає ПВСП після виявлення зміни сили пілот-сигналу за трьох умов 1) сила пілот-сигналів Сусідньої або Залишкової групи виявлена вищою за поріг TADD, 2) сила пілот-сигналів Кандидатської групи перевищує силу пілот-сигналів Активної групи більш, У цих патентах описано ПДКУ для обслуговування великої КІЛЬКОСТІ мобільних телефонних користувачів, забезпечених трансферами, з використанням супутникових ретрансляторів або наземних базових станцій (або комірок, далі - БС) і сигналів розширеного спектру ПДКУ дозволяє багаторазово використовувати спектру частот, підвищуючи цим КІЛЬКІСТЬ користувачів системи ПДКУ забезпечує значно більш ефективне використання смуги порівняно з іншими системами Спосіб одночасної демодуляції даних, що надійшли різними шляхами від одної БС, і одночасної демодуляції надлишкових даних від різних БС описано у патенті США 5 109 390, включеному посиланням У цьому патенті передбачено об'єднання окремо модульованих сигналів для одержання оцінки переданих даних, яка має більшу вірогідність, ніж дані одного шляху або від одної БС Передачу зв'язку звичайно ділять на дві категорії - жорстку і м'яку При жорсткій передачі зв'язку мобільна станція (далі - МС), переходячи з однієї комірки сотової системи до іншої, спочатку перериває зв'язок з первісною коміркою, а потім встановлює зв'язок у новій комірці При м'якій передачі зв'язку МС спочатку завершує встановлення зв'язку у новій комірці і лише після цього перериває зв'язок з БС попередньої комірки Отже при м'якій передачі зв'язку МС протягом деякого часу підтримує надлишковий зв'язок з двома комірками - первісною і новою При м'якій передачі зв'язку імовірність втрати зв'язку значно менша, ніж при жорсткій Крім того, якщо МС рухається поблизу межі між комірками, вона може здійснювати багаторазові передачі зв'язку, що може зумовлюватись невеликими змінами довкілля Таке явище, яке називають пінгпонгом, дуже послаблюється при м'якій передачі зв'язку М'яку передачу зв'язку описано у патенті США 5 101 501, включеному посиланням ніж на поріг ТСОМР, 3) сила пілот-сигналів Активної або Кандидатської групи залишається нижче порогу TDROP довше зумовленого часу ПВСП ідентифікує БС і вказує на силу пілотсигналу у дБ Вадою м'якої передачі зв'язку є необхідність передавати надлишкову інформацію, що потребує додаткових комунікаційних ресурсів, але вона значно поліпшує якість зв'язку і тому, взагалі, існує потреба у мінімізації КІЛЬКОСТІ БС, що передають надлишкову інформацію до користувача МС і забезпечують належну якість передачі Задачею винаходу є створення нових удосконалених способу і пристрою для виконання м'якої передачі зв'язку у мобільній системі зв'язку Перш за все необхідно відзначити, що однією з серйозніших проблем у існуючих системах є те що члени Активної групи визначаються порівнянням енергії пілот-сигналів з фіксованими порогами Однак, ЦІННІСТЬ встановлення надлишкового зв'язку з МС дуже сильно залежить від енергії інших сигналів, що надходять до МС Наприклад, не дуже великою є ЦІННІСТЬ передачі до МС надлишкового сигналу, який при прийомі має рівень енергії - 15дБ, якщо МС вже приймає сигнал з рівнем - 5дБ Але має 54524 суттєву ЦІННІСТЬ передача до МС надлишкового сигналу, який при прийомі має рівень енергії 15дБ, якщо МС вже приймає сигнал з рівнем 13дБ У МС при визначенні необхідності надсилати повідомлення про потребу перенесення пілотсигналу з Кандидатської групи у Активну, виміряна енергія кожного з пілот-сигналів Кандидатськоїгрупи ітеративне порівнюється з порогом, визначеним згідно з змінною COMBINED_PILOT, яка є сумою енергій (тобто Ес/Іо) пілот-сигналів Активної групи У бажаному втіленні оптимальне значення цього порогу визначається у МС без передачі значень цих порогів або перевірки вимог МС у БС Якщо найсильніший пілот-сигнал Кандидатської групи задовольняє пороговим умовам, від додається до Активної групи, а значення СОМBINED_PILOT переобчислюється з урахуванням щойно доданого пілот-сигналу Після ітеративного процесу, виконаного над членами Кандидатської групи, виконується другий ітеративний процес, метою якого є визначити, чи слід видалити пілот-сигнал з нової Активної групи У цьому процесі пілот-сигнали перевіряються у порядку починаючи з найслабкішого до найсильнішого Значення енергії COMBINED_PILOT обчислюється як сума енергій пілот-сигналів Активної групи На підставі цього значення СОМBINED_PILOT обчислюється значення порогу, з яким мають порівнюватись пілот-сигнал и Щоб уникнути передачі зайвих сигналів, цей поріг визначається у МС Якщо енергія пілот-сигналу була нижчою за цей поріг протягом зумовленого часу, до БС передається повідомлення з вимогою видалити цей пілот-сигнал Нова Активна група надсилається до КБС через БС, з яким МС має зв'язок КБС встановлює зв'язки з БС-членами побудованої у МС Активної групи і після завершення цієї операції надсилає до МС підтвердження Після ЦЬОГО МС підтримує зв'язок через БС нової Активної групи У бажаному втіленні МС веде моніторинг пілот-сигналів і на підставі цього моніторингу визначає членів Кандидатської групи Крім того, МС визначає бажаність зміни складу поточної Активної групи згідно з згаданими вище критеріями, вимірюючи енергії пілот-сигналів Активної і Кандидатської груп і динамічно коригуючи необхідні пороги на підставі власної оцінки комунікаційного довкілля Після визначення бажаності змін складу Активної групи МС генерує ПВСП, описане вище, яке включає ідентифікатори пілот-сигналів Активної і Кандидатської груп, їх виміряні значення енергії і ВІДПОВІДНІ показники, які вказують на те, чи має пілот-сигнал залишатись у цих групах або чи має бути переведений у сусідню групу Особливості, задачі і переваги винаходу детально наведено у подальшому описі з посиланнями на креслення, у яких фіг 1 - схема сотової мережі зв'язку, фіг 2 - схема сотової мережі зв'язку фіг 1 з КБС, фіг 3 - блок-схема МС згідно з винаходом, фіг 4 - блок-схема БС згідно з винаходом, фіг 5 - залежність динамічних порогів від енергій пілот-сигналів Активної групи, яка ілюструє лі ншні операції над параметрами м якої передачі зв'язку, фіг 6 - алгоритм процедури створення нової Активної групи у МС і фіг 7 - діаграма станів, що ілюструє винахід На фіг 1 зображено мережу радіозв'язку, у якій географічну місцевість розділено на зони обслуговування, які називають комірками, зображені у вигляді суміжних шестикутників Кожна комірка обслуговується БС 4 Кожна з БС 4 передає пілотсигнал, який однозначно ідентифікує її У типовому втіленні БС 4 працюють у режимі ПДКУ Детальний опис м'якої передачі зв'язку у системах зв'язку з ПДКУ можна знайти у патентах США 5 101 501 та 5 267 261 МС 2 знаходиться у комірці, яку обслуговує БС 4 Оскільки МС 2 знаходиться поблизу межі комірки, дуже імовірно, що ця МС перебуває у стані м'якої передачі зв'язку і має одночасний зв'язок з кількома БС, наприклад, з БС 4А і 4Б Тоді БС 4А, 4Б складають активну групу Можливо, крім того, що МС 2 виявила, що енергія пілот-сигналів інших сусідніх БС перевищує зумовлений поріг TADD, але з цими БС вона не має зв'язку Ці БС утворюють Кандидатську групу, у яку входять, наприклад, БС 4Ві4Є На фіг 2 зображено типову мережу зв'язку Інформація, що надсилається до МС 2 надходить від комунальної комутаторної телефонної мережі (далі - ККТМ) або іншої, безпровідної системи (не показаної) до КБС 6 КБС 6 надсилає цю інформацію до БС, які утворюють Активну групу у МС 2, у даному випадку КБС 6 обмінюється надлишковою інформацією з БС 4А та 4Б Винахід стосується також випадків, коли комірки розділено на сектори Обмін сигналами і їх обробка здійснюються у БС для кожного сектора окремо Для спрощення можна вважати, що кожна БС 4 містить кілька унікальне розташованих БС Однак, зрозуміло, що винахід може бути використаний і у випадку секторованих комірок, оскільки БС може окремо підтримувати зв'язок з окремими секторами комірки Стан, коли МС підтримує зв'язок з кількома секторами комірки, називають м'якшою передачею зв'язку Спосіб і пристрій для здійснення такої передачі зв'язку описано у заявці 08/144 903 на патент США від ЗО 10 1993, включеній посиланням У МС 2 кожний екземпляр пакету даних окремо приймається, демодулюється і декодується Декодовані дані об'єднуються, що дає оцінку даних, більш надійну, ніж окремі демодульовані екземпляри даних Фіг 3 містить ілюструє МС згідно з винаходом МС 2 безперервно або через певні інтервали виміряє силу пілот-сигналів БС 4 Сигнали, прийняті антеною 50 МС 2, через антенний перемикач 52 надходять до приймача 54, який підсилює сигнал, перетворює з зниженням частоти і фільтрує його, після чого надсилає цей сигнал до пілотдемодулятора 58 пошукової підсистеми 55 Крім того, прийнятий сигнал спрямовується до демодуляторів 64А - 64Л інформаційного каналу Ці демодулятори або їх підгрупа демодулюють кожний окремий сигнал, прийнятий МС 2 Від демодуляторів 64А - 64Л сигнал надходить до об'єд 54524 нувача 66, який об'єднує демодульовані дані, формуючи поліпшену оцінку переданих даних МС 2 виміряє силу пілот-каналів Керуючий процесор 62 формує параметри пошуку для пошукового процесора 56 У типовому втіленні систем з ПДКУ керуючий процесор 62 формує для процесора 56 псевдошумовий (ПШ) зсув Пошуковий процесор 56 генерує ПШ ПОСЛІДОВНІСТЬ, яку пілотдемодулятор 58 використовує для демодуляції прийнятого сигналу Демодульований пілот-сигнал надходить до накопичувача 60 енергії, який виміряє енергію цього сигналу, накопичуючи цю енергію протягом зумовленого періоду Виміряні значення енергії пілот-сигналу надходять до керуючого процесора 62, який у типовому втіленні порівнює ці значення з динамічними порогами, як це описано нижче МС 2 передає ПВСП, яке включає усі пілотсигнали з енергією, вищою за TADD, І усіх членів поточної Активної групи, пілот-сигнали яких мають енергію нижче TDROP протягом зумовленого періоду У типовому втіленні МС 2 формує і надсилає ПВСП після виявлення зміни сили пілот-сигналу за трьох умов 1) сила пілот-сигналів Сусідньої або Залишкової групи виявлена вищою за поріг TADD, 2) сила пілот-сигналів Кандидатської групи перевищує силу пілот-сигналів Активної групи більш, ніж на поріг ТСОМР, 3) сила пілот-сигналів Активної або Кандидатської групи залишається нижче порогу TDROP довше зумовленого часу У типовому втіленні ПВСП ідентифікує БС і несе значення виміряної енергії ВІДПОВІДНИХ ПІЛОТсигналів (у дБ), причому БС ідентифіковано за зсувами їх пілот-сигналів Динамічні пороги можуть бути обчислені у МС 2 Керуючий процесор 62 надсилає ідентифікатори пілот-сигналів і їх ВІДПОВІДНІ виміряні значення енергії до генератора 70 повідомлень, який на підставі цієї інформації формує ПВСП і надсилає його до передавача 68 Передавач 68 кодує, модулює, підсилює і перетворює сигнал з підвищенням частоти, після чого через антенний перемикач 52 надсилає його до антени 50 для передачі ПВСП приймається антеною ЗО БС 4 (фіг 4) і надсилається до приймача 28, який підсилює і перетворює прийнятий сигнал з зниженням частоти, демодулює цей сигнал і декодує його, після чого надсилає повідомлення до інтерфейсу 26 КБС Інтерфейс 26 КБС надсилає це повідомлення до КБС 6 У ньому повідомлення надходить до селектора 22, який може також одержувати надлишкові повідомлення від інших БС, що мають зв'язок з МС 2 Селектор 22 об'єднує оцінки повідомлень від БС, що мають зв'язок з МС 2, і одержує поліпшену пакетну оцінку У бажаному втіленні МС 2 веде моніторинг пілот-сигналів і визначає членів Активної, Кандидатської і Сусідньої груп, а також визнає бажаність змін у складі поточної Активної групи, використовуючи ЛІНІЙНІ співвідношення Y1 = SOFT_SLOPE * COMBINED_PILOT + m Ш +ADDJNTERCEPT Y2 = SOFT_SLOPE * COMBINED_PILOT + ™ ( ] + DROP INTERCEPT 8 де Y1 - динамічний поріг, перевищення якого виміряною енергією пілот-сигналу Кандидатської групи означає, що ця енергія має зрости раніше, ніж МС вимагатиме додання відповідної БС до Активної групи, Y2 - динамічний поріг, перевищення яким виміряної енергії пілот-сигналу, що ця енергія має впасти раніше, ніж МС вимагатиме переведення відповідної БС з Активної групи до Кандидатської Для створення гістерезису бажано, щоб Y1 перевищував Y2 З рівнянь (1) та (2) можна бачити, що якщо виміряна енергія пілот-сигналу з поточної групи падає нижче Y2, відповідну БС слід перевести до Кандидатської групи Для переведення цієї БС назад у нову Активну групу, має трапитись одна з двох подій або значення COMBINED_PILOT знижується на таке ж значення аь або власна виміряна енергія пілот-сигналу підвищується на Д 2 Отже, Д-і, Д 2 є гістерезисними значеннями СОМBINED_PILOT і репрезентують ВІДПОВІДНІ енергії пілот-сигналів, необхідні для того, щоб відвернути багаторазові видалення з Активної групи і повернення даного пілот-сигналу Таким чином, пілот-сигнал слід додати до Активної групи, якщо значення COMBINED_PILOT не перевищує Х-і, і слід видалити з цієї групи, якщо значення COMBINED_PILOT не нижче Х 2 3 рівнянь (1), (2) можна одержати SOFT_SLOPE = Ді / Д 2 (3) D R O P J N T E R C E P T = TDROP - Х 2 * Ді / Д 2 (4) ADDJNTERCEPT = DROPJNTERCEPT + Д2 (5) Ці співвідношення ілюстровано фіг 5 Динамічні пороги Y1, Y2 репрезентовано у дБ як функцію об'єднаної енергії пілот-сигналів (тобто Ес/Іо), репрезентованої також у дБ Можна бачити, що ці функції є ЛІНІЙНИМИ з схилом SOFT_SLOPE, тобто Ді/Д 2 (див (3)) і ВІДПОВІДНИМИ значеннями ординат точок перетинів з ADDJNTERCEPT і DROPJNTERCEPT, які можуть бути негативними Ордината перетину з D R O P J N T E R C E P T на фіг 5 є негативною Типовим значенням SOFT_SLOPE є 2 У бажаному втіленні МС 2 сама може обчислювати SOFT_SLOPE, оцінюючи бажані Ді і Д 2 шляхом моніторингу флуктуацій усіх пілот-сигналів Активної і Кандидатської груп, як це описано для фіг 3, і застосування рівняння (3) МС 2 і, зокрема, керуючий процесор 62 можуть оцінювати Д і , виміряючи відхилення COMBINED_PILOT протягом зумовленого періоду У бажаному втіленні, наприклад, Ді дорівнюється стандартному відхиленню СОМBINED_PILOT за зумовлений період, щоб відвернути вимогу передачі зв'язку, спричинену природними відхиленнями COMBINED_PILOT У бажаному втіленні Д 2 можна покласти рівним різниці між TADD та TDROP, ОСКІЛЬКИ TADD та TDROP ви значають гістерезис, необхідний для Д 2 Як уже відзначалось, Хі є значенням СОМBINED_PILOT, достатнім для додання пілотсигналу до Активної групи (тобто Y1 перетинає TADD), a X 2 Є значенням COMBINED_PILOT, достатнім для видалення пілот-сигналу з Активної групи (тобто Y2 перетинає TDROP) Значення Х 2 може бути запрограмоване у МС 2 або передане від БС службовим повідомленням, У бажаному втіленні йому надається значення, достатнє для забезпе 54524 10 чення надійного зв'язку у прямому каналі без зайвої надлишковості Типове значення Хг = -7,11 дБ У бажаному втіленні МС 2 сама може визначати Х-і, обчислюючи його значення з Ді та Дг і відомих значень Хг та TDROP Отже, якщо Д-і = 1,5, Дг = 3, Хг = -7,11дБ і TDROP = 12,44дБ, то тоді SOFT_SLOPE 2, ADDJNTERCEPT = 1,22дБ, D R O P J N T E R C E P T = -1,78дБ і Хі =-7,61 дБ (рівняння (1 - 5)) пілот-сигнали Кандидатської групи були перевірені Якщо ні, після переходу до опер 200 здійснюються описані вище операції, якщо так або якщо виявилось (опер, 206), що PQ не перевищує порогу Y1, відбувається перехід до операції 214 Цією операцією нова Активна група упорядковується від найнижчої енергії до найвищої, отже, тепер у цій групі Рді - найнижча енергія і Рд2 - найнижча після РАЇ і т д Наведені параметри передачі зв'язку формуються у МС 2 і використовуються для оновлення Активної групи Формування цих параметрів у МС 2, а не у БС 4 або КБС 6, є більш швидким і не потребує значного обміну повідомленнями Крім того, це звільняє від виконання верифікаційних обчислень у БС 4 або КБС 6 МС 2 виміряє енергію прийнятих пілот-сигналів, як це описано для фіг З, і надсилає результати до керуючого процесора 62 У ВІДПОВІДЬ процесор 62 генерує параметри передачі зв'язку, і, якщо ці параметри вимагають додання пілот-сигналу до Активної групи або видалення його з цієї групи, МС 2 через БС 4 передає до КБС 6 повідомлення, яким ідентифікує членів нової Активної групи КБС 6 встановлює зв'язки з МС 2, а МС 2 готує канальні демодулятори 64А 64Л до демодуляції прийнятих сигналів згідно з складом нової Активної групи Операцією 218 змінна і циклу встановлюється у 1, а операцією 220 обчислюється значення COMBINED PILOT для перевірки Р А| COMBINED_PILOT встановлюється рівним сумі виміряних енергій усіх пілот-сигналів Активної групи з енергією, яка перевищує енергію пілотсигналу, що перевіряється Отже, СОМBINED_PILOT визначається за рівнянням У типовому втіленні керуючий процесор 62 у МС 2 формує нову Активну групу згідно з процедурою фіг 6 Операцією 200 пілот-сигнали з виміряною енергією, що перевищує поріг TADD, додаються до Активної групи, а пілот-сигнали з виміряною енергією, що залишається нижче порогу TDROP протягом зумовленого періоду, видаляються з цієї групи У бажаному втіленні цей період, відраховується таймером TTDROP керуючого процесора 62, тобто таймер TTDROP стежить за часом, протягом якого енергія пілот-сигналу залишається нижче порогу видалення Наявність цього таймера виключає можливість помилкового видалення сильного пілот-сигналу, який зазнав короткочасного послаблення, тобто швидкого затухання, викликаного зміною довкілля Операцією 202 пілот-канали Кандидатської групи упорядковуються від сильнішого до слабкішого, отже, Реї > Рс2 > , де, бажано, для і-го члена Кандидатської групи PQ = Ес/Іо (згідно з п 6 6 6 2 2 IS-95) Операцією 204 COMBINED_PILOT встановлюється рівним енергії усіх пілот-сигналів Активної групи, а змінна і циклу встановлюється у 1 Операцією 206 визначається, чи можна перевести члена С, Кандидатської групи у Активну групу Для цього Реї порівнюється з порогом, обчисленим згідно з поточним COMBINED_PILOT У бажаному втіленні поріг Y1 обчислюється за формулою (1) Якщо енергія PQ пілот-сигналу перевищує поріг Y1, відбувається перехід до операції 208, якою від МС 2 до БС 4 передається ПВСП з вимогою додати і-й пілот-сигнал до Активної групи У ВІДПОВІДЬ БС 4 надсилає до МС 2 повідомлення, яким інструктує МС 2 додати і-й пілот-сигнал до Активної групи Операцією 210 обчислюється нове значення COMBINED_PILOT, яке дорівнює старому значенню COMBINED_PILOT плюс енергія Р Сі Операцією 212 збільшується на 1 змінна і Операцією 213 здійснюється перевірка, чи усі N COMBINTD_PILOT= ^ P A J (6) де N - КІЛЬКІСТЬ членів Активної групи Операцією 222 здійснюється порівняння енергії поточного пілот-сигналу з порогом Y2, визначеним згідно з обчисленим COMBINED_PILOT У бажаному втіленні Y2 обчислюється за рівнянням (2) Якщо виміряна енергія Рд пілот-сигналу перевищує Y2, відбувається перехід до операції 224, таймери TTDROP видалення для пілот-сигналів А, AN встановлюються у 0 і формування нової Активної групи закінчується операцією 234 Якщо виміряна енергія Рд, пілот-сигналу не перевищує Y2, відбувається перехід до операції 226, яка перевіряє, чи відпрацював таймер TTDROP для А, Якщо так, то операцією 228 МС 2 передає до БС 4 ПВСП з вимогою перевести член А, з Активної групи у Кандидатську БС 4 у ВІДПОВІДЬ надсилає підтверджуюче повідомлення, і відбувається перехід до операції 230 Якщо операція 226 виявляє, що таймер TTDROP Д Л Я А, ще не відпрацював, відбувається перехід до операції 230, якою збільшується на 1 змінна і циклу, після чого операцією 232 здійснюється перевірка, чи всі пілот-сигнали Д Активної групи були перевірені Якщо так, операцією 234 формування нової Активної групи завершується, у іншому разі відбувається перехід назад до операції 220 з повторенням описаних вище дій Фіг 7 містить діаграму роботи згідно з винаходом Сусідня група 700 містить пілот-сигнал an Якщо параметр Ес/Іо цього пілот-сигналу перевищує поріг TADD, МС 2 переводить його у Кандидатську групу 702 Якщо параметр Ес/Іо пілот-сигналу С, Кандидатської групи 702 залишається нижче п о р о г у TDROP, а й о г о т а й м е р TTDROP відпрацював, МС 2 переводить цей пілот-сигнал з Кандидатської групу 702 у Сусідню групу 700 Ці два переходи відповідають операції 200 фіг 6 (додання і видалення членів Кандидатської групи) Якщо параметр Ес/Іо пілот-сигналу А, Кандидатської групи перевищує динамічний поріг Y1, визначений рівнянням (1), МС 2 надсилає до БС 4 ПВСП 706 з вимогою додати С, до Активної групи 708 У ВІДПОВІДЬ БС 4 надсилає до МС 2 Повідомлення про напрямок передачі зв'язку (ПНПЗ), інструктуючи МС 2 додати С, до Активної групи 708 Це додання відповідає операціям 202 - 213 фіг 6 Якщо параметр Ес/Іо пілот-сигналу А, Активної 11 54524 12 групи не досягає динамічного порогу Y2 і його таймер TTDROP відпрацював, МС 2 надсилає до БС 4 ПВСП 710 з вимогою видалити А, з Активної групи У ВІДПОВІДЬ БС 4 надсилає до МС 2 ПНПЗ, інструктуючи цим МС 2 видалити А, з Активної групи Ці вилучення відповідають операціям 214 - 228 фіг 6 повідь БС 4 надсилає до МС 2 ПНПЗ, інструктуючи цим МС 2 перевести А, з Активної групи у Кандидатську групу 702 Ці переходи не відповідають операціям фіг 6 Наведений опис бажаних втілень дає змогу фахівцям використати винахід За бажанням на основі концепцій винаходу можуть бути реалізова Якщо параметр Ес/Іо пілот-сигналу А, Активної групи не досягає порогу TDROP Y2 і його таймер TTDROP відпрацював, МС 2 надсилає до БС 4 ПВСП 704 з вимогою видалити А, з Активної групи У від ні ІНШІ втілення або зроблені модифікації описаних втілень Наведені у описі втілення не обмежують винаходу ДАНІ ВІД/ДО . < - » ККТМ Фіг. 2 ґ_ КЕРУЮЧИЙ ПРОЦЕСОР ДАНІ ПРЯМОГО КДНЯЛЇДО карисгувдча ґ_ ГЕНЕРАТОР ПОВІДОМЛЕНЬ Фіг. З 13 54524 ЗВОРОТНИЙ КАНАЛ ВІД ІНШИХ БС Фіг. 4 14 15 16 ПНПЗ НА ВИДАЛЕННЯ пипз ид ДОДАННЯ Фіг.7 Підписано до друку 03 04 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for defining base communication stations used for connecting with a distance mobile station
Назва патенту російськоюСпособ и устройство для определения базовых станций связи, используемых для соединения с удаленной подвижной станцией
Автори російськоюSoliman, Samir, S.
МПК / Мітки
Мітки: віддаленою, станцією, станцій, пристрій, базоbих, зв'язку, пошуку, спосіб
Код посилання
<a href="https://ua.patents.su/8-54524-sposib-ta-pristrijj-dlya-poshuku-bazobikh-stancijj-dlya-zvyazku-z-viddalenoyu-stanciehyu.html" target="_blank" rel="follow" title="База патентів України">Спосіб та пристрій для пошуку базоbих станцій для зв’язку з віддаленою станцією</a>
Спосіб передачі інформації у комунікаційній мережі з множиною станцій, комунікаційна мережа і комунікаційний пристрій, який є однією із станцій такої мережі
Номер патенту: 45997
Опубліковано: 15.05.2002
Автори: Ларсен Джеймз Дейвід, Ларсен Марк Сіверт, Ван Лохем Герард Віллем, Ларсен Дейвід Віктор
МПК: H04B 7/26, H04L 12/56
Мітки: пристрій, спосіб, інформації, мережа, такої, однією, комунікаційній, передачі, мережі, станцій, комунікаційна, множиною
Формула / Реферат:
1. Спосіб передачі інформації від первісної станції (А) до станції-адресата (М) у комунікаційній мережі з множини станцій (А - М), що передбачає:моніторинг на первісній станції (А) активності інших станцій (А - М) мережі тапередачу повідомлення до щонайменше однієї проміжної станції (Б) для подальшої ретрансляції до станції-адресата (М), який відрізняється тим, щододатково передбачає крок передачі назад від першої...
Спосіб та система базової станції для конфігурування радіоінтерфейсу між мобільною станцією та базовою станцією мобільної радіосистеми пакетної передачі даних з часовим мультиплексуванням
Номер патенту: 53669
Опубліковано: 17.02.2003
Автори: Менцель Хрістіан, Оттль Мартін
МПК: H04Q 7/38, H04B 7/26, H04Q 7/22
Мітки: станцією, мобільною, передачі, станції, радіоінтерфейсу, мультиплексуванням, базової, часовим, система, даних, конфігурування, радіосистеми, спосіб, базовою, пакетної, мобільної
Формула / Реферат:
1. Спосіб формування конфігурації радіоінтерфейсу між мобільною станцією (MS) та базовою станцією (BS) мобільної радіосистеми з часовим мультиплексуванням для пакетної передачі даних, причому• передача від мобільної станції (MS) на базову станцію (BS) позначається передачею у висхідному напрямку, а від базової станції (BS) на мобільну станцію (MS) - передачею у низхідному напрямку;• утворюється канал (GPRS-K) з принаймні одного...
Спосіб визначення абонентів базових станцій і пристрій для здійснення цього способу
Номер патенту: 44285
Опубліковано: 15.02.2002
Автори: Бар-Давід Гіл, Хамді Валід, Падовані Роберто
Мітки: спосіб, базових, абонентів, пристрій, цього, визначення, способу, здійснення, станцій
Формула / Реферат:
1. Способ идентификации базовых станций, уровень принимаемого сигнала которых достаточен для установления связи с мобильной станцией, в сотовой системе связи, в которой мобильный пользователь через указанную мобильную станцию устанавливает связь с другими пользователями через по меньшей мере одну базовую станцию, включенную в активный список, содержащий в качестве записей одну или более базовых станций, и каждая из базовых станций, входящих,...
Пристрій для пошуку електромагнітних маркерів
Номер патенту: 32267
Опубліковано: 15.12.2000
Автори: Яворський Ігор Миколайович, Драбич Петро Петрович, Вакульський Олександр Андрійович, Драбич Олег Петрович
МПК: G01R 19/25, G01V 3/10
Мітки: пристрій, електромагнітних, пошуку, маркерів
Текст:
...генераторноприймальної рамки і незаземлвний вхід двостороннього обмежувача, до виходу якого підключені послідовно з'єднані попередній і вузькосмуговий підсилювачі напруги і перший аналоговий вхід двоканального комутатора аналогових сигналів, до об*ццнаних виходів ЯРОГО відключені послідовно .-з'єднані усереднюючий перетворювач імпульсних сигналів, перетворювач напруги в частоту і індикатор, а другий вхід двоканального комутатора аналогових...
Пристрій для пошуку електромагнітних маркерів
Номер патенту: 25096
Опубліковано: 30.10.1998
Автори: Стецько Ігор Григорович, Зубик Йосип Львович, Драбич Петро Петрович, Кичма Андрій Олексійович
МПК: G01V 3/10
Мітки: пошуку, пристрій, маркерів, електромагнітних
Формула / Реферат:
Пристрій для пошуку електромагнітних маркерів, який складається з задаючого генератора, підсилювача змінної напруги, електронного ключа, індикатора, генераторно-приймальної індуктивної рамки і джерела постійної напруги, який відрізняється тим, що додатково містить формувач імпульсів управління, високовольтний перетворювач напруги, перетворювач напруги в струм, конденсатор, тиристор, двосторонній діодний обмежувач, обчислювальний перетворювач...
Попередній патент: Спосіб профілактики спайкової хвороби
Наступний патент: Антикорозійне полімерне покриття металевої поверхні, переважно магістрального трубопроводу, спосіб його нанесення, полімерний праймер та полімерний клей-розплав
Випадковий патент: Пристрій для контролю ресурсу повітряних високовольтних вимикачів