Пристрій для сільськогосподарських машин для безконтактного дослідження простягнутих над грунтом контурів та спосіб дослідження таких контурів з використанням цього пристрою
Формула / Реферат
1. Пристрій до сільськогосподарських машин для безконтактного дослідження простягнутих над грунтом контурів, який відрізняється тим, що має лазерний далекомірний пристрій, який містить пристрій для прийому-передачі лазерного променя, який призначений для визначення відстані до певного контуру на основі виміру часу дії випроміненого і відбитого від точки цього контуру використовуваного для дослідження лазерного променя, причому лазерні досліджуючі промені є у певному діапазоні кута періодично або східчасто поворотними в площині досліджуючих променів, а сам лазерний далекомірний пристрій змонтовано на сільськогосподарській машині таким чином, що площина досліджуючих променів нахилена під гострим кутом ![]() до грунту в напрямі руху вперед; і аналізувальний пристрій, який призначено для визначення кореспондуючого з кутом повороту положення точки контура (вертикальна та горизонтальна позиція), для кожного кута повороту
до грунту в напрямі руху вперед; і аналізувальний пристрій, який призначено для визначення кореспондуючого з кутом повороту положення точки контура (вертикальна та горизонтальна позиція), для кожного кута повороту ![]() на основі виміряної відстані, розташування і встановлення по рівню лазерного далекомірного пристрою на сільськогосподарській машині (монтажна висота, кут нахилу до грунту).
на основі виміряної відстані, розташування і встановлення по рівню лазерного далекомірного пристрою на сільськогосподарській машині (монтажна висота, кут нахилу до грунту).
2. Пристрій за п. 1, який відрізняється тим, що лазерний досліджуючий промень має можливість відхилення за допомогою поворотного дзеркала або рухомого фокусуючого пристрою.
3. Пристрій за п. 1, який відрізняється тим, що лазерний далекомірний пристрій виконаний з можливістю повороту, що забезпечує поворот лазерного досліджуючого променя.
4. Пристрій за будь-яким одним з пп. 1-3, який відрізняється тим, що лазерний далекомірний пристрій закріплено на сільськогосподарській машині з можливістю регулювання по висоті.
5. Пристрій за будь-яким одним з пп. 1-4, який відрізняється тим, що лазерний далекомірний пристрій закріплено на сільськогосподарській машині з можливістю регулювання нахилу, що забезпечує регулювання нахилів лазерного досліджуючого променя до грунту.
6. Пристрій за будь-яким одним з пп. 1-5, який відрізняється тим, що аналізувальний пристрій виконаний з можливістю обробки сигналу сенсора нахилу, який додатково змонтовано на сільськогосподарській машині у вигляді системи виміру виском або відцентрової системи для визначення положення нахилу сільськогосподарської машини та врахування відповідного положення нахилу при визначенні контуру.
7. Спосіб дослідження контуру з пристроєм за пунктами 1-6, який відрізняється тим, що під час руху сільськогосподарської машини безперервно з встановлених значень відстані визначають та фіксують контур по всій ширині дослідження.
8. Спосіб за пунктом 7, який відрізняється тим, що з контуру і/або суми контурів, що йдуть один за одним, визначають слід, що залишає сільськогосподарська машина.
9. Спосіб за пунктами 7 і 8, який відрізняється тим, що визначений слід за допомогою відомих засобів використовують для автоматичного управління сільськогосподарською машиною вздовж цього сліду.
10. Спосіб за будь-яким одним з пп. 7-9, який відрізняється тим, що розраховують середину визначеного сліду і використовують її для подальших розрахунків.
11. Спосіб за будь-яким одним з пп. 7-10, який відрізняється тим, що генерований для автоматичного управління сигнал, за допомогою зсуву, на який можна чинити вплив вручну і/або шляхом визначення похилого положення сільськогосподарської машини, і/або шляхом визначення робочого напрямку, регулюють таким чином, що можливе паралельне зміщення між визначеним слідом і центральним променем.
12. Спосіб за будь-яким одним з пп. 7-11, який відрізняється тим, що як визначений слід використовують борозну і сільськогосподарською машиною за допомогою відомих засобів управляють вздовж дослідженої борозни.
13. Спосіб за будь-яким одним з пп. 7-11, який відрізняється тим, що як визначений слід використовують валок і в аналізувальному пристрої відповідно визначають поперечний переріз розпізнаного валка зібраного врожаю над лінією грунту.
14. Спосіб за пунктом 13, який відрізняється тим, що визначають проходження лінії грунту під досліджуваним валком зібраного врожаю в результаті дослідження ненакритої валком лінії грунту по обидва боки валка зібраного врожаю і долучають для більш точного визначення поперечного перерізу валка.
15. Спосіб за будь-яким одним з пп. 13-14, який відрізняється тим, що визначений поперечний переріз валка в поєднанні з частотою дослідження лазерного далекомірного пристрою та швидкістю руху сільськогосподарської машини використовують для визначення обсягу валка.
16. Спосіб за будь-яким одним з пп. 13-15, який відрізняється тим, що визначений обсяг валка в поєднанні з даними щільності валка використовують для виміру кількості зібраного врожаю.
17. Спосіб за будь-яким одним з пп. 13-16, який відрізняється тим, що визначають відстані між сусідніми валками та використовують їх для визначення площі врожаю.
18. Спосіб за пунктами 13 і 17, який відрізняється тим, що щонайменше одну з визначених величин використовують для індикації і/або для встановлення оптимальних робочих параметрів сільськогосподарської машини.
19. Спосіб за будь-яким одним з пп. 13-18, який відрізняється тим, що щонайменше одну з визначених величин застосовують для встановлення швидкості руху сільськогосподарської машини.
20. Спосіб за будь-яким одним з пп. 7-19, який відрізняється тим, що по всій площі і/або на ділянках частково використовуваної площі щонайменше одну з величин, визначену з досліджених контурів, за допомогою встановленої на сільськогосподарській машині системи визначення місцеположення в режимі реального часу, наприклад системи навігації з використанням штучного супутника землі, забезпечують наземними координатами та реєструють для подальшого застосування.
21. Спосіб за будь-яким одним з пп. 7-19, який відрізняється тим, що досліджують контур грунту сільськогосподарської корисної площі для встановлення високоточної тривимірної моделі місцевості, причому відповідно досліджені точки контура грунту за допомогою встановленої на сільськогосподарській машині системи визначення місцеположення в режимі реального часу, наприклад системи навігації з використанням штучного супутника землі, з урахуванням щонайменше одного похилого положення сільськогосподарської машини забезпечують наземними координатами.
22. Спосіб за будь-яким одним з пп. 7-19, який відрізняється тим, що досліджують поверхню колоскових культур зернового поля, а визначений контур використовують для регулювання висоти різального апарата і/або висоти мотовила і/або визначення завантаження різального апарата.
23. Спосіб за будь-яким одним з пп. 7-19, який відрізняється тим, що досліджують вільні колії в міжряддях, які залишилися в результаті попередніх робочих операцій на ділянках зібраного врожаю, та досліджені колії в міжряддях за допомогою відомих засобів використовують для автоматичного управління сільськогосподарською машиною.
24. Спосіб за будь-яким одним з пп. 7-19, який відрізняється тим, що визначають порогове значення для збільшення висоти і/або абсолютної висоти контура, що досліджується, в напрямі руху перед сільськогосподарською машиною і при перевищенні порогового значення формують попереджувальний сигнал для механіка, обслуговуючого сільськогосподарську машину.
25. Спосіб за будь-яким одним з пп. 7-19, який відрізняється тим, що використовують пристрій для визначення перешкод, наприклад щогли ліній високовольтних передач, дерева, каміння і т. ін.
26. Спосіб за будь-яким одним з пп. 7-19, який відрізняється тим, що визначену під час періоду повороту досліджуючого променя відстань коригують відповідно до пройденого відрізка шляху.
Текст
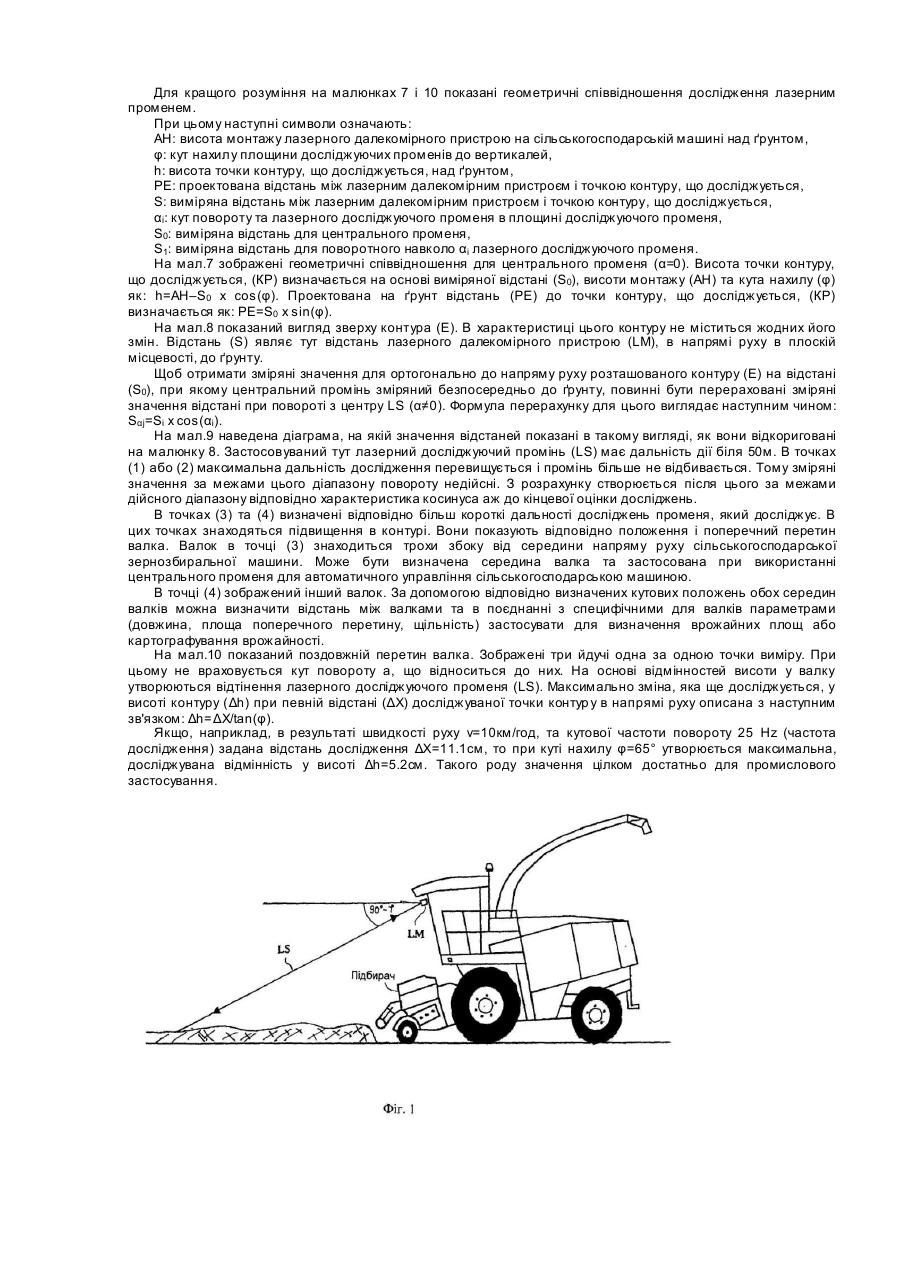
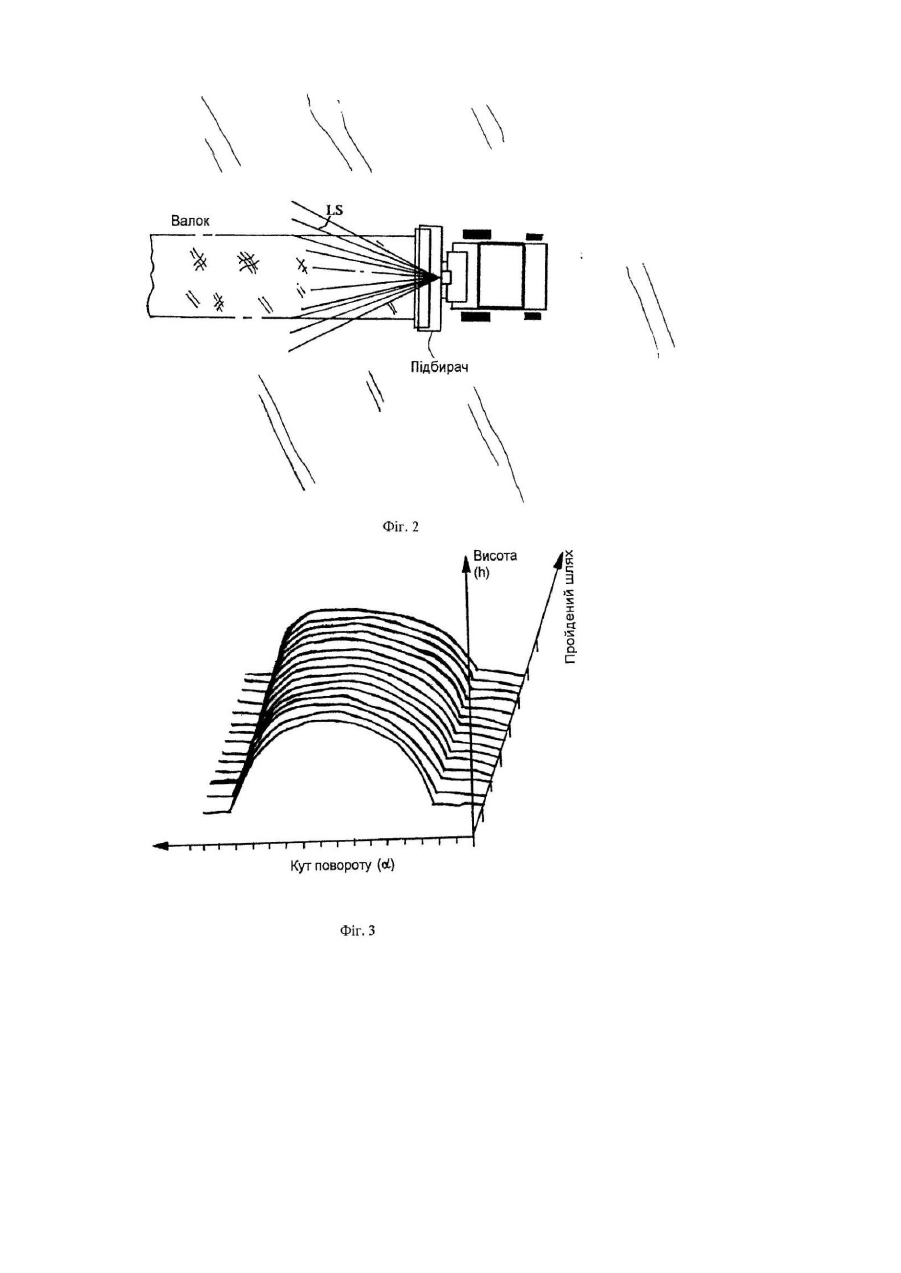
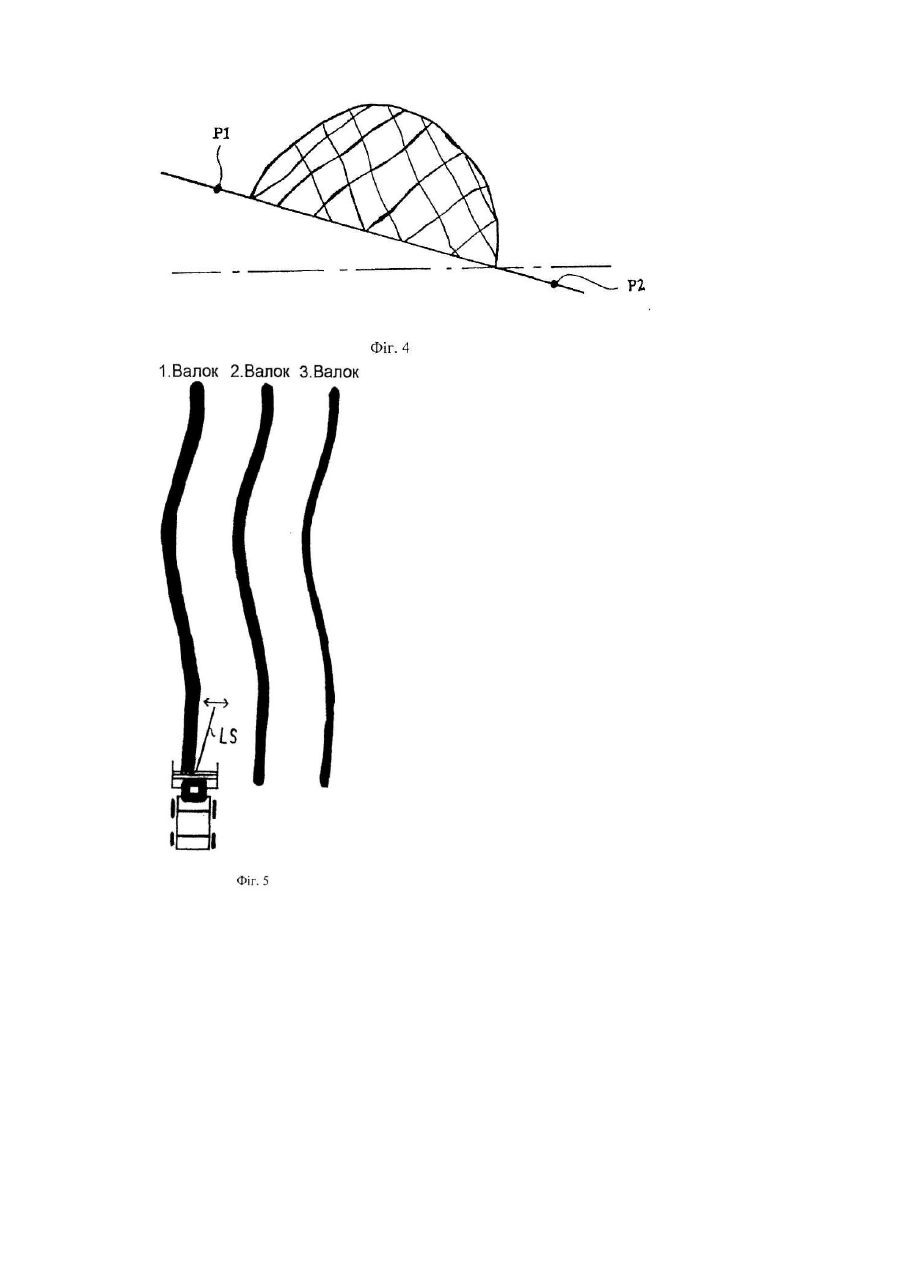
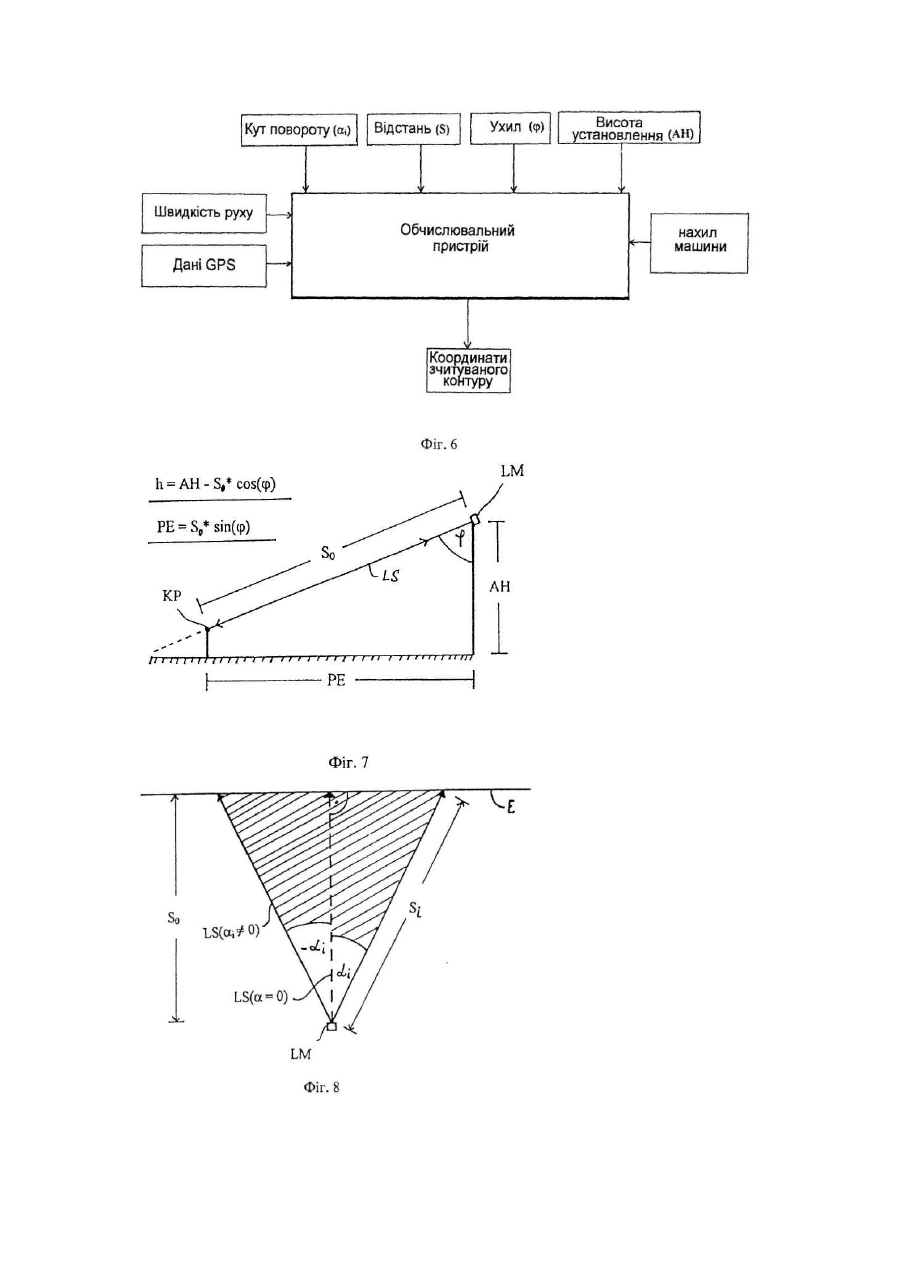
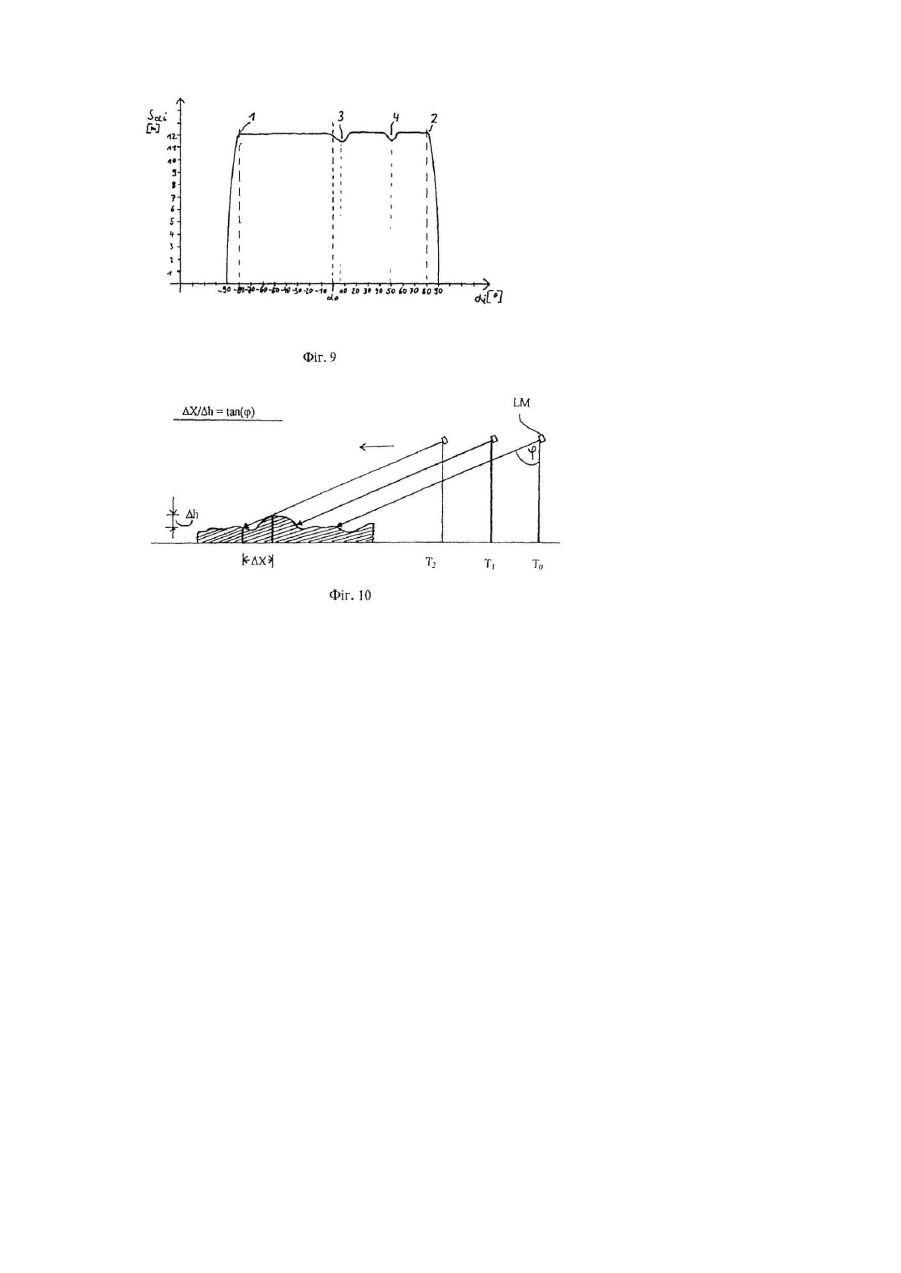
Винахід стосується пристрою для сільськогосподарських машин для безконтактного дослідження простягнутих над ґр унтом контурів. Такого роду пристрої відомо з статті "Дослідження валків ультразвуком" (журнал "Сільськогосподарська техніка", 5-93, с.266-268). Описаний там пристрій складається з декількох розташованих на кріпильній планці на відстані 40 см один від одного ультразвукових сенсорів, спрямованих вертикально на ґрунт. Ця кріпильна планка змонтована, наприклад, на кормозбиральній машині або на транспортуючому сінний прес тракторі. За допомогою ультразвукових сенсорів можна визначити висоту, наприклад, валка соломи або зеленого корму над ґрунтом у визначених точках, завдяки чому досліджується контур валка над ґрунтом вздовж горизонтальної лінії. Описаний там пристрій має однак деякі недоліки. Відомий пристрій для дослідження контурів відносно дорогий через те, що безпосередньо для дослідження необхідно застосовувати декілька ультразвукових сенсорів. Крім того істотний недолік полягає в тому, що відстань ультразвукових сенсорів один від одного на кріпильній планці не повинна перевищувати мінімальної відстані, інакше й противному випадку справа доходить до утворюючого перешкоди взаємного впливу ультразвукових сенсорів один на одного на основі недостатнього фокусування звукових випромінювань. Однак ця обставина обмежує чіткість (щільність точок виміру) дослідження контурів по горизонталі. Крім того відстань ультразвукових сенсорів над ґрунтом або над досліджуваним контуром також не повинна бути занадто великою (не більше, ніж 1.2м), тому що через відносно велику розбіжність звукових випромінювань справа також доходить до утворюючого перешкоди взаємного впливу ультразвукових сенсорів один на одного. Таку низьку монтажну висоту на сільськогосподарській машині реалізувати часто буває складно вже з конструктивних причин. Крім того такого роду громіздка і змонтована на низькій висоті кріпильна планка з декількома ультразвуковими сенсорами при використанні в польових умовах може бути дуже легко пошкоджена. А збільшити монтажну висоту кріпильної планки можна лише в тому випадку, якщо збільшується відстань ультразвукових сенсорів один від одного на кріпильній планці, що в свою чергу означає незначну чіткість по горизонталі (поперек напрямку руху) дослідження контурів валка. Спроба зменшити мінімальну відстань ультразвукових сенсорів один від одного за рахунок того, що вони працюють не водночас, а сусідні сенсори проводять виміри поперемінно, вимагає застосування дорогої системи регулювання окремих ультразвукових сенсорів. Для дослідження контурів, що проводиться попереду машини, яке було б необхідним, наприклад, для автоматичного управління вздовж контуру досліджуваного валка, кріпильну планку з ультразвуковими сенсорами належало б монтувати більш дорогим і більш складним способом на розташованій на фронтальному боці сільськогосподарської машини і подовженій в напрямі вперед додатковій кріпильній тязі. Наступний недолік відомого пристрою дослідження полягає в тому, що точність і надійність дослідження зібраного врожаю за допомогою ультразвуку дуже сильно залежить від виду і власти вості зібраного врожаю та від погодних умов. Завданням винаходу є створення пристрою до сільськогосподарських машин для безконтактного дослідження простягнутих над ґрунтом контурів, який усуває недоліки описаного вище пристрою. Завдання згідно з винаходом вирішується в результаті реалізації відмітних ознак, вказаних в пункті 1 формули винаходу. Згідно з винаходом для безконтактного дослідження простягнутих над ґр унтом контурів застосовують відомий сам по собі лазерний далекомірний пристрій, що складається з пристрою для прийому-передачі лазерного променя, який на основі виміру часу дії випроміненого і відбитого від точки контуру використовуваного для дослідження лазерного променя визначає відстань до цього контуру. Лазерні досліджуючі промені є тепер в певному діапазоні кута періодично або східчасто поворотними в площині досліджуючих променів. При цьому лазерний далекомірний пристрій змонтований на сільськогосподарській машині спрямованим таким чином, що площина досліджуючих променів є нахиленою під гострим кутом до ґрунту в напрямі руху вперед. За допомогою аналізувального пристрою для кожного кута повороту на основі виміряної відстані, розміщення та встановлення по рівню лазерного далекомірного пристрою на сільськогосподарській машині (монтажна висота, кут нахилу до ґрунту) визначають кореспондуюче з кутом повороту положення точки контур у (вертикальна і горизонтальна позиція над ґрунтом). Застосування та розміщення згідно з винаходом лазерного далекомірного пристрою має істотні переваги у порівнянні з відомим з рівня техніки пристроєм дослідження за допомогою ультразвукових сенсорів. Для пристрою дослідження згідно з винаходом потрібний лише пристрій для прийому-передачі лазерного променя, завдяки якому цей пристрій до сільськогосподарських машин у порівнянні з ультразвуковим пристроєм дослідження з ' декількома ультразвуковими сенсорами є істотно більш дешевим. При застосуванні пристрою згідно з винаходом дослідження контуру перед сільськогосподарською машиною здійснюється в різних точках поперек напряму руху завдяки повороту лазерного досліджуючого променя. Кількість точок дослідження на лінії дослідження при цьому істотно збільшується у порівнянні з відомим раніше ультразвуковим пристроєм дослідження. Так, наприклад, в діапазоні кута повороту +45° і повороті лазерного досліджуючого променя на 0,5° кроку кількість точок дослідження досягає 180. На основі незначної розбіжності лазерного досліджуючого променя можна добитися відносно високої чуткості (щільність досліджуваних точок), тому що центри сусідніх досліджуваних точок можуть тісно прилягати один до одного, не перехльостуючи досліджувані плями на досліджуваному контурі та не перешкоджаючи однозначному узгодженню місця відбиття. Усувається взаємовплив сусідніх сенсорів, існуючий у відомому раніше пристрої дослідження, тому що відстань до точок контуру визначається послідовно. Дослідження, що проводиться далеко попереду машини, яке є необхідним, наприклад, для автоматичного управління вздовж досліджуваного контуру, за допомогою пристрою згідно з винаходом реалізується найпростішим чином. Так, наприклад, при монтажній висоті над грунтом 380 см на сільськогосподарській машині та куті нахилу (φ) до ґрунту 65° відстань, що досліджується, перед сільськогосподарською машиною може складати біля 8.15м. На основі незначної розбіжності лазерного досліджуючого променя при цій відносно великій відстані дослідження справа не доходить до збільшення досліджуваної плями, що не визнається, як у випадку з ультразвуковими сенсорами. Такого роду дослідження контуру далеко попереду машини неможливо реалізувати за допомогою відомого раніше ультразвукового пристрою дослідження. Для цього необхідна відповідно довга кріпильна тяга перед сільськогосподарською машиною для монтажу кріпильної планки для ультразвукових сенсорів, в результаті чого вся система може стати повністю непрактичною. Відбиття лазерного досліджуючого променя нa відміну від ультразвук у є відносно незалежним від зумовлених погодними умовами властивостей зібраного досліджуваного врожаю, завдяки чому підвищуються можливості застосування лазерного досліджувального пристрою. У більш прийнятній формі виконання лазерний досліджуючий промінь відхиляється поворотним дзеркалом або рухомим фокусуючим пристроєм. Завдяки цьому можна досягти відносно великої кількості поворотів в момент дослідження за одну секунду і високої частоти дослідження, що важливо особливо при підвищених швидкостях руху сільськогосподарської машини. Так, наприклад, при застосуванні двигунів-гальванометрів для обертання поворотного дзеркала поворот можливий в діапазоні мілісекунд. Завдяки цьому можна досягти також високої щільності досліджуваних точок в напрямі руху сільськогосподарської машини. В альтернативній формі виконання для повороту лазерного досліджуючого променя передбачено повертати самий лазерний далекомірний пристрій. В одній з форм виконання передбачено монтувати лазерний далекомірний пристрій всередині кабіни водія, за вітровим склом. Пил на склі може бути відфільтрований з сигналів і не шкодить надійності дослідження, саме скло також не завдає збитків функціональній спроможності. Пристрій для дослідження згідно з винаходом завдяки високій точності, надійності, простій конструкції і управлінню може бути використаний для різних видів застосування. Різних способів застосування пристрою згідно з винаходом стосуються пункти формули винаходу, які відносяться до способу. Згідно з одним з цих пунктів формули винаходу передбачено під час руху сільськогосподарської машини безперервно вздовж прокладеного шляху визначати та фіксувати контур по всій ширині дослідження. Завдяки цьому контур валків зібраного врожаю, що приймаються сільськогосподарською машиною, може бути дуже точно досліджений і зареєстрований. За допомогою досліджуваного контуру в аналізувальному пристрої здійснюється визначення відповідного поперечного перетину досліджуваного валка зібраного врожаю над лінією ґрунту. При цьому визначений таким чином поперечний перетин валка можна застосовувати для регулювання швидкості руху сільськогосподарської машини, причому регулювання можна встановити, наприклад, на постійний або максимальний прийом зібраного врожаю. При поперечному перетині валка, що зменшується, швидкість руху підвищується, так що врожай, що збирається, на одиницю часу є постійним. Якщо виявляються специфічні для зібраного врожаю параметри щільності, то їх можна також зв'язувати з визначеним в процесі досліджень поперечним перетином валка і в поєднанні з встановленим, пройденим відрізком шляху валка визначати поряд з обчисленням обсягу також і масу зібраного під час руху машини врожаю (комплексно). Крім того визначені таким чином специфічні для валка параметри відповідно застосовують також для регулювання оптимальних робочих параметрів зернозбирального комбайна. В переважній формі виконання винаходу можна відрізки пройденого шляху сільськогосподарської машини, встановлені в межах часу повороту досліджуючого променя, залучати для виміру відстані. Особливо переважним чином для полегшення праці водія сільськогосподарської машини досліджуваний контур валка, здебільшого середину валка, за допомогою відомих способів застосовують під час прийому валка для автоматичного управління сільськогосподарською машиною. В поєднанні з розташованою на сільськогосподарській машині системою визначення місцеположення в режимі реального часу (система навігації з використанням штучного супутника землі) можна по всій використовуваній площі і/або на ділянках частково використовуваної площі вздовж постачити досліджувані контури відповідно наземними координатами (географічна широта та довгота, висота над рівнем моря або декартовими координатами (х, у) відносно точки польової ділянки). При цьому поряд зі специфічними для валка параметрами визначають також відстані між сусідніми валками і на основі цих даних створюють дані польової ділянки і/або дані відносно зібраного врожаю. Ці дані реєструють після цього для наступного застосування. При застосуванні сенсора на сільськогосподарській машині, який визначає похиле положення сільськогосподарської машини, наприклад, при роботі на схилі, при проїзді на спусках або по бугристому ґрунту, можна в поєднанні з розміщеною на сільськогосподарській машині системою визначення місцеположення з використанням штучного супутника землі, завдяки дослідженню контуру ґрун ту, з урахуванням похилого положення сільськогосподарської машини і позиції створити високоточну, тривимірну модель місцевості сільськогосподарської корисної площі. Похилі положення сільськогосподарської зернозбиральної машини можна використати також для простої корекції відстані дослідження. Наступною можливістю застосування лазерного пристрою для дослідження є визначення відстані площі зернових колоскових культур до сільськогосподарської зернозбиральної машини. Цей сигнал використовують для регулювання висоти різального механізму або мотовила, завдяки чому досягається значне полегшення праці водія. В цьому випадку використання встановлені відстані дослідження можуть бути залучені в подальшому для визначення дійсного завантаження різального механізму. Для цього межі різального механізму координують з кутом повороту лазерного пристрою для дослідження. Якщо в цьому діапазоні повороту відбувається стрибок контуру, то в цьому місці знаходиться край земельної ділянки. Між цим встановленим краєм земельної ділянки і найбільш далеко усуненою від цього стрибка контуру межею різального механізму можна після цього визначити завантаження. Якщо в результаті наявності місць складування в насадженнях можуть мати місце декілька стрибків краю земельної ділянки, то відповідні зовнішні стрибки краю земельної ділянки або один зовнішній стрибок краю земельної ділянки та одну визначену межу різального механізму залучають для визначення завантаження різального механізму. Цю величину завантаження можна після цього реєструвати відомим способом і/або застосовувати для більш точного розрахунку площ. Інша можливість використання полягає в дослідженні вільних коліїв в міжряддях, які є результатом проведення попередніх робочих операцій (наприклад, посів та розпилювання засобів захисту рослин) на ділянках зібраного врожаю, причому за допомогою цих досліджених колій в міжряддях за допомогою відомих засобів здійснюють автоматичне управління сільськогосподарською зернозбиральною машиною. Наступне переважне застосування лазерного пристрою для дослідження полягає в дослідженні слідів обробки. В результаті цього при обробці трактор-тягач за допомогою відомих засобів автоматично спрямовують вздовж досліджуваного сліду. Особливо придатний цей пристрій для дослідження слідів або борозен, що утворюються при оранці. Переважним виявляється при цьому зокрема широкий діапазон охоплення пристрою. При реверсі напряму обробки лазерний пристрій для дослідження може повертатися не механічно, а тільки за допомогою обладнаного зміненим зсувом регулювального сигналу, що подається автоматичним пристроєм управління. Для цього, наприклад, розміщені на плузі сенсори визначають положення рами плуга і ці дані повідомляють пристрою сигналізації або пристрою-регулятору управління. На зсув можна чинити після цього вплив вручн у і/або шляхом визначення похилого положення сільськогосподарської машини. В наступній формі виконання винаходу лазерний пристрій для дослідження в сільськогосподарських машинах, які допускають примикаючий слід обробки лише в заздалегідь обраному, однаковому напрямі обробки (наприклад, плуг для грядок, різальні апарати), може бути змонтований безпосередньо над слідом проїзду чи краєм ділянки, що обробляється, на оброблювальному агрегаті або на тягачі чи на сільськогосподарській зернозбиральній машині. Перерахунок позиції сліду або включення зсуву може бути в цьому випадку виключено. Завдяки лазерному пристрою для дослідження може бути крім того впроваджена система попередження для експлуатації сільськогосподарської машини. В результаті завдання порогового значення для збільшення висоти і/або абсолютної висоти досліджуваного контур у в напрямі руху при перевищенні порогового значення створюється попереджувальний сигнал для механіка, обслуговуючого сільськогосподарську машину. Завдяки цьому водій, наприклад, зернозбирального комбайна одержує попередження про появу ділянки бугристого ґрунту або перешкод, які можуть призвести до пошкодження робочих агрегатів. Загалом за допомогою лазерного пристрою для дослідження на полі можуть бути розпізнані перешкоди (наприклад, щогли ліній високовольтних передач, дерева, каміння і т. ін.), які на основі свого вертикального положення не перебувають в межах діапазону дозволених очікуваних параметрів контуру. Винахід більш докладно пояснюється за допомогою креслень, що додаються. На них показані: на мал.1 - боковий вигляд кормозбиральної машини з лазерним пристроєм для дослідження, на мал.2 - вигляд зверху кормозбиральної машини з лазерним пристроєм для дослідження валка, на мал.3 - тривимірне зображення досліджуваного пристрою згідно з винаходом контуру валка вздовж шляху р уху, на мал. 4 - поперечний перетин досліджуваного валка над похилистим ґрунтом, на мал.5 - вигляд зверху різних валків на лугу, на мал.6 - блок-схема аналізувального пристрою з його вхідними сигналами, на мал. 7-10 - геометричні співвідношення дослідження лазерним променем. На мал.1 показана кормозбиральна машина з підбирачем у вигляді приставки для прийому складеного у валки зібраного врожаю, на якій змонтований лазерний далекомірний пристрій (LM) на висоті кабіни водія (біля 3.80см) з нахилом під кутом 65° до ґрунту (зображено схематично). Завдяки цьому відстань дослідження складає приблизно 8.15м від лазерного далекомірного пристрою. Місце монтажу на сільськогосподарській машині визначають відповідно в залежності від конструктивних особливостей сільськогосподарської машини і специфічної мети застосування та за можливості воно повинно бути вибране високо для оптимального розпізнання контурів. Щоб досягти високої гнучкості установки лазерний далекомірний пристрій (LM) монтують на сільськогосподарській машині здебільшого з можливістю регулювання висоти та нахилу. Для кращого розуміння на мал.2 показаний вигляд зверху кормозбиральної машини з підбирачем перед валком, який підбирають. Лазерний далекомірний пристрій (LM) розміщується по відношенню до довжини кормозбиральної машини поперек напряму руху в середині машини і досліджує контур валка симетрично по обидва боки поздовжнього напряму сільськогосподарської машини. На мал.3 показане тривимірне зображення досліджуваного лазерним далекомірним пристроєм (LM) контуру валка вздовж шляху р уху. Відстані ліній контуру в напрямку руху створюються з частоти дослідження (період повороту для лазерного досліджуючого променя) та швидкості руху. На мал.4 показаний досліджуваний контур валка по похилій лінії ґрунту (Р1-Р2). З урахуванням дійсного, похилистого проходження лінії ґрунту, яка утворюється на основі інтерполяції контурів ґрунту зліва та справа поряд з валком, можна по відношенню до горизонталей проводити більш точний розрахунок поперечного перетину валка. На мал.5 показано вигляд зверху кормозбиральної машини при прийомі різних за величиною, сусідніх валків зібраного врожаю. На мал.6 показана блок-схема аналізувального пристрою для розрахунку координат контуру, що досліджується. Як вхідний сигнал аналізувальнии пристрій приймає виміряну відстань (S) до відповідної досліджуваної точки контур у, кут повороту (α) якої досліджений під цією точкою контуру, як і нахил (φ) та висота монтажу (АН) лазерного далекомірного пристрою (LM). Використовуючи ці дані аналізувальнии пристрій обчислює після цього координати контуру. В переважній формі виконання аналізувальний пристрій приймає наступні вхідні сигнали, такі як швидкість руху, дані системи навігації з використанням штучного суп утника землі (GPS) або інформація про похиле положення сільськогосподарської машини. Аналізувальний пристрій може бути інтегрованим в лазерний далекомірний пристрій (LM) або виконаний у вигляді одного чи декількох окремих компонентів. Здебільшого аналізувальний пристрій з'єднаний з центральною системою управління або регулювання руху сільськогосподарської машини. Для кращого розуміння на малюнках 7 і 10 показані геометричні співвідношення дослідження лазерним променем. При цьому наступні символи означають: АН: висота монтажу лазерного далекомірного пристрою на сільськогосподарській машині над ґрунтом, φ: кут нахилу площини досліджуючих променів до вертикалей, h: висота точки контуру, що досліджується, над ґрунтом, РЕ: проектована відстань між лазерним далекомірним пристроєм і точкою контуру, що досліджується, S: виміряна відстань між лазерним далекомірним пристроєм і точкою контуру, що досліджується, αі: кут повороту та лазерного досліджуючого променя в площині досліджуючого променя, S0: виміряна відстань для центрального променя, S1: виміряна відстань для поворотного навколо αі лазерного досліджуючого променя. На мал.7 зображені геометричні співвідношення для центрального променя (α=0). Висота точки контуру, що досліджується, (КР) визначається на основі виміряної відстані (S0), висоти монтажу (АН) та кута нахилу (φ) як: h=AH–S0 x cos(φ). Проектована на ґрунт відстань (РЕ) до точки контуру, що досліджується, (КР) визначається як: PE=S0 х sin(φ). На мал.8 показаний вигляд зверху контура (Ε). В характеристиці цього контуру не міститься жодних його змін. Відстань (S) являє тут відстань лазерного далекомірного пристрою (LM), в напрямі руху в плоскій місцевості, до ґрунту. Щоб отримати зміряні значення для ортогонально до напряму руху розташованого контуру (Е) на відстані (S0), при якому центральний промінь зміряний безпосередньо до ґрунту, повинні бути перераховані зміряні значення відстані при повороті з центру LS (α≠0). Формула перерахунку для цього виглядає наступним чином: Sαj=Si x cos(αі). На мал.9 наведена діаграма, на якій значення відстаней показані в такому вигляді, як вони відкориговані на малюнку 8. Застосовуваний тут лазерний досліджуючий промінь (LS) має дальність дії біля 50м. В точках (1) або (2) максимальна дальність дослідження перевищується і промінь більше не відбивається. Тому зміряні значення за межами цього діапазону повороту недійсні. З розрахунку створюється після цього за межами дійсного діапазону відповідно характеристика косинуса аж до кінцевої оцінки досліджень. В точках (3) та (4) визначені відповідно більш короткі дальності досліджень променя, який досліджує. В цих точках знаходяться підвищення в контурі. Вони показують відповідно положення і поперечний перетин валка. Валок в точці (3) знаходиться трохи збоку від середини напряму руху сільськогосподарської зернозбиральної машини. Може бути визначена середина валка та застосована при використанні центрального променя для автоматичного управління сільськогосподарською машиною. В точці (4) зображений інший валок. За допомогою відповідно визначених кутових положень обох середин валків можна визначити відстань між валками та в поєднанні з специфічними для валків параметрами (довжина, площа поперечного перетину, щільність) застосувати для визначення врожайних площ або картографування врожайності. На мал.10 показаний поздовжній перетин валка. Зображені три йдучі одна за одною точки виміру. При цьому не враховується кут повороту а, що відноситься до них. На основі відмінностей висоти у валку утворюються відтінення лазерного досліджуючого променя (LS). Максимально зміна, яка ще досліджується, у висоті контуру (Δh) при певній відстані (ΔΧ) досліджуваної точки контур у в напрямі руху описана з наступним зв'язком: Δh=ΔΧ/tan(φ). Якщо, наприклад, в результаті швидкості руху ν=10км/год, та кутової частоти повороту 25 Hz (частота дослідження) задана відстань дослідження ΔΧ=11.1см, то при куті нахилу φ=65° утворюється максимальна, досліджувана відмінність у висоті Δh=5.2см. Такого роду значення цілком достатньо для промислового застосування.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for agricultural machines for noncontact investigation of contours stretched above the soil and a method of investigating such contours using this device
Автори англійськоюHuster Jochen
Назва патенту російськоюУстройство для сельскохозяйственных машин для бесконтактного исследования простертых над почвой контуров и способ исследования таких контуров с использованием этого устройства
Автори російськоюХустер Йохен
МПК / Мітки
МПК: G01S 17/89, A01B 69/00
Мітки: простягнутих, таких, дослідження, пристрій, машин, грунтом, сільськогосподарських, використанням, спосіб, безконтактного, пристрою, цього, контурів
Код посилання
<a href="https://ua.patents.su/8-66341-pristrijj-dlya-silskogospodarskikh-mashin-dlya-bezkontaktnogo-doslidzhennya-prostyagnutikh-nad-gruntom-konturiv-ta-sposib-doslidzhennya-takikh-konturiv-z-vikoristannyam-cogo-pristr.html" target="_blank" rel="follow" title="База патентів України">Пристрій для сільськогосподарських машин для безконтактного дослідження простягнутих над грунтом контурів та спосіб дослідження таких контурів з використанням цього пристрою</a>
Мастильний пристрій для декількох місць змащування і спосіб змащування місць змащування машини з використанням цього мастильного пристрою
Номер патенту: 59404
Опубліковано: 15.09.2003
Автор: Гус Рольф
МПК: F16N 13/00
Мітки: спосіб, цього, мастильного, машини, мастильний, декількох, місць, пристрій, змащування, використанням, пристрою
Формула / Реферат:
1. Мастильний пристрій для декількох місць змащування, зокрема для подавання мастила до декількох місць змащування в'язальної машини, який містить насосний пристрій для нагнітання мастила, при цьому насосний пристрій має поршень, який встановлений з можливістю аксіального переміщення у циліндрі, і розподільний пристрій, за допомогою якого подаване поршнем мастило розподіляється до однієї або декількох ліній групи ліній, що відходять від...
Пристрій для вологого гоління, взаємодіючий зі шкірою елемент цього пристрою та спосіб виготовлення цього елемента
Номер патенту: 54371
Опубліковано: 17.03.2003
Автори: Свіні Філіп Дж., Аппрілле Доменік, Тсенг Мінгчін М., Поркаро Альфред
МПК: B26B 21/00
Мітки: пристрій, взаємодіючий, гоління, елемент, спосіб, шкірою, елемента, цього, пристрою, виготовлення, вологого
Формула / Реферат:
1. Устройство для влажного бритья, содержащее лезвийный элемент и структуру, определяющую расположенный вблизи бреющей кромки лезвийного элемента внешний взаимодействующий с кожей элемент, отличающееся тем, что взаимодействующий с кожей элемент содержит удлиненную гибкую часть оболочки, в которой заключена, по меньшей мере, одна удлиненная твердая часть сердечника, размещенная в осевом направлении на всем протяжении части оболочки.2....
Пристрій для плавлення дрібних вуглецевмісних частинок та спосіб плавлення вказаних дрібних частинок з використанням цього пристрою
Номер патенту: 26245
Опубліковано: 19.07.1999
Автори: Ю Сенг Хун, МІН Донг Юн, ШІН Мйоунг К'юн
МПК: C21C 5/48
Мітки: вказаних, спосіб, цього, дрібних, частинок, пристрою, пристрій, плавлення, вуглецевмісних, використанням
Формула / Реферат:
1. Устройство для плавления мелких углеродсодержащих частиц, включающее узел подачи кислорода, содержащий вводную трубу, соединенную с источником питания воздуха/кислорода для подачи воздуха и/или кислорода, и узел подачи углеродсодержащих частиц, содержащий трубу; соединенную с источником питания частиц/транспортирующего газа для подачи мелких частиц и транспортирующего газа, при этом один из указанных узлов расположен внутри второго узла,...
Пристрій для дозованої подачі дрібнозернистого матеріалу в реакційну ємність і спосіб експлуатації цього пристрою та пристрій для отримання розплаву металу
Номер патенту: 57038
Опубліковано: 16.06.2003
Автори: ВАЛЛНЄР Фелікс, ГЕННАРІ Удо, КЕППЛІНГЕР Леопольд Вернер
МПК: C21B 13/14, C21B 13/00
Мітки: розплаву, пристрою, матеріалу, дрібнозернистого, отримання, цього, подачі, металу, дозованої, пристрій, реакційну, експлуатації, ємність, спосіб
Формула / Реферат:
1. Пристрій (29) для дозованої подачі дрібнозернистого матеріалу в реакційну ємність (10), який містить шлюз з псевдозріджувальним шаром (31), в який зверху введений засіб подачі матеріалу (9) і в який, в області його нижнього кінця, входить газовий трубопровід (33) для подачі псевдозріджувального газу, і що включає також переливну трубу (34) для подальшого транспортування дрібнозернистого матеріалу, який відрізняється тим, що зовні...
Пристрій формування електронного оригінал-макета для друкування карток (наклейок) і спосіб використання цього пристрою
Номер патенту: 58018
Опубліковано: 15.07.2003
Автор: Соловйов Валентин Вячеславович
МПК: G06F 19/00
Мітки: друкування, спосіб, цього, пристрій, використання, карток, оригінал-макета, електронного, формування, пристрою, наклейок
Формула / Реферат:
1. Пристрій формування електронного оригінал-макета для друкування карток (наклейок), що використовуються при вивченні іноземних мов чи спеціальної термінологі, який містить блок пам'яті інформаційних елементів, призначений для збереження принаймні записів, які містять інформаційні елементи, відповідні призначеним для вивчання поняттям, блок пам'яті відібраних понять, призначений для збереження принаймні посилань на відібрані для використання...
Попередній патент: Спосіб одержання рекомбінантного фактора viii, рекомбінантний фактор viii, культуральне середовище
Наступний патент: Двокамерний контейнер для дозованих аерозолів вільних від пропеленту
Випадковий патент: Світлосильний об'єктив